反应式步进电机环形分配器
4.4 步进电动机

电机对外做功的能源。 电磁转矩T驱使转子转过偏转角dθ 时,步进电动机对外输出的机械 能 Tdθ ,从能量平衡关系 Tdθ = dWm 即静态转矩为 在线性系统中
dW dWm dθ 1 Wm = LI 2 2 T=
若控制绕组中的电流I为常数,每相控制绕组是两个极上绕组串接而成, 且每极绕组的匝数为N,则
n= 60 f Zr N
f 为控制脉冲的频率,即每秒输入的脉冲数。 反应式步进电动机的转速取决于脉冲频率、转子齿数和拍数,与电源电 压、负载、温度等因素无关。改变脉冲频率可以改变转速,故可进行无 级调速。
f 60 f 60 f 360o n= = = o θs 步进电动机的转速还可用步距角表示 Zr N Zr N 360o 6
N NZr N , N为运行拍数, = k ⋅ m (k = 1 2) ,m为电机相数。
步距角与拍数N及转子齿数Zt有关。减小步距角,可提高控制精度。 在一个齿距内磁场变化一个周期,用电角度表示时,一个齿距就对应 360°电角度(或 2π 电弧度)。用电角度(或电弧度)表示的齿距角 为 θte = 360o 。
图4-29 永磁式步进电动机
4.5.1 步进电动机的其它类型
3. 感应子式永磁步进电动机
图4-30 感应子式永磁步进电动机
结构 两相感应子式永磁步进电动机的定子结构与单段反应式步进电 动机相同,1、3、5、7极上的控制绕组串联为A相,2、4、6、8极 上的控制绕组串联为B相。转子是由环形磁铁和两端铁心组成。两 端转子铁心上沿外圆周开有小齿,两端铁心上的小齿彼此错过1/2齿 距。定、转子齿数的配合与单段反应式步进电动机相同。
四相八拍运行时的步距角是四相四拍运行时的一半。 四相双四拍运行 通电方式为AC→CB→BD→DA→…。步距角与四相单四拍运行时一样 为1/4齿距角,即1.8°。
步进电机环形分配器
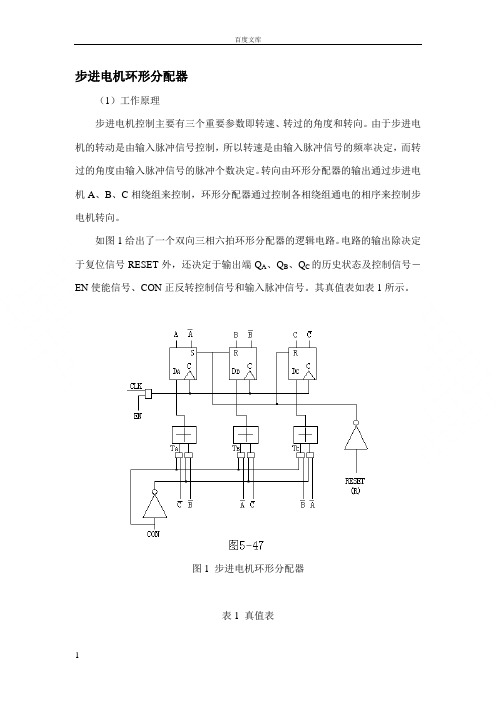
步进电机环形分配器(1)工作原理步进电机控制主要有三个重要参数即转速、转过的角度和转向。
由于步进电机的转动是由输入脉冲信号控制,所以转速是由输入脉冲信号的频率决定,而转过的角度由输入脉冲信号的脉冲个数决定。
转向由环形分配器的输出通过步进电机A、B、C相绕组来控制,环形分配器通过控制各相绕组通电的相序来控制步电机转向。
如图1给出了一个双向三相六拍环形分配器的逻辑电路。
电路的输出除决定于复位信号RESET外,还决定于输出端Q A、Q B、Q C的历史状态及控制信号-EN使能信号、CON正反转控制信号和输入脉冲信号。
其真值表如表1所示。
图1 步进电机环形分配器表1 真值表(2)程序设计程序设计采用组合逻辑设计法,由真值表可知:当CON=0时,输出Q A、Q B、Q C的逻辑关系为:当CON=1时,输出Q A、Q B、Q C的逻辑关系为:当CON=0,正转时步进机A、B、C相线圈的通电相序为:当CON=1,反转时各相线圈通电相序为:Q A、Q B、Q C的状态转换条件为输入脉冲信号上升沿到来,状态由前一状态转为后一状态,所以在梯形图中引入了上升沿微分指令。
PLC输入/输出元件地址分配见表2。
表2 PLC输入/输出元件地址分配表根据逻辑关系画出步进电机机环形分配器的PLC梯形图,如图2所示。
CON10Z EN CLK A B C A B C1ΦΦ10010001↑10111001↑00101001↑01101101↑01000101↑11010101↑100100PLC IN代号PLC OUT代号X0CLK Y0Q AX1EN Y1Q BX2RESET Y2QcX3CON图2 环形分配器的梯形图梯形图工作原理简单分析如下:设初始状态为RESET有效。
X2常开触点闭合,Y0输出为“1”状态,Y1、Y2为“0”状态,RESET无效后,上述三输出状态各自保持原状态。
CON=0(X3=0),当EN(X1=1)有效,且有输入脉冲信号CLK(X0)输入,CLK(X0)上升沿到来,M0辅助继电器常开触点闭合一个扫描周期。
步进电机三相六拍环形分配器

10.2 步进电动机位置控制系统10.2.2 步进电动机的脉冲分配电路1. 硬件脉冲分配器电路步进电动机的脉冲分配可以由硬件和软件两种方法来实现。
硬件环形分配器需要根据步进电动机的相数和要求的通电方式而设计专门的电路,图10.6所示为一个三相六拍的环形分配器。
分配器的主体是三个J-K触发器。
三个J-K触发器的Q输出端分别经各自的功放线路与步进电动机A、B、C三相绕组连接。
当QA=1时,A相绕组通电;QB=1时,B相绕组通电;QC=1时,C相绕组通电。
DR+和DR-是步进电动机的正反转控制信号。
正转时,各相通电顺序:A-AB-B-BC-C-CA反转时,各相通电顺序:A-AC-C-CB-B-BA图10.6 三相六拍环形分配器图10.6所示为的三相六拍环形分配器逻辑真值表如表10.1所示。
序号控制信号状态输出状态导电绕组表10.1 三相六拍环形分配器逻辑真值表2. 软件脉冲分配对于不同的计算机和接口器件,软件环分有不同的形式,现以AT89C51单片机配置的系统为例加以说明。
(1)由P1口作为驱动电路的接口控制脉冲经AT89C51的并行I/O接口P1口输出到步进电动机各相的功率放大器输入,设P1口的P1.0输出至A相,P1.1输出至B相,P1.2输出至C相。
(2)建立环形分配表为了使电动机按照如前所述顺序通电,首先必须在存储器中建立一个环形分配表,存储器各单元中存放对应绕组通电的顺序数值,如表10.2所示。
当运行时,依次将环形分配表中的数据,也就是对应存储器单元的内容送到P1口,使P1.0、P1.1、P1.2依次送出有关信号,从而使电动机轮流通电。
表10.2 三相六拍软件环形分配数据表表为三相六拍环形分配表,K为存储器单元基地址(十六位二进制数),后面所加的数为地址的索引值。
可见,要是电动机正转,只需依次输出表中各单元的内容即可。
当输出状态已是表底状态时,则修改索引值使下次输出重新为表首状态。
如要使电动机反转,则只需反向依次输出各单元的内容。
步进电机的环形分配器类型_解释说明以及概述
步进电机的环形分配器类型解释说明以及概述1. 引言1.1 概述本文将探讨步进电机中的一种重要组件,即环形分配器类型。
通过解释和说明环形分配器的概念、特点以及工作原理,我们可以深入了解其在步进电机系统中的重要作用。
1.2 文章结构文章将按照以下结构进行叙述:引言、正文、环形分配器类型解释说明、步进电机类型概述和结论。
通过这样的层次结构,读者能够逐步了解步进电机和环形分配器之间的关系,并对它们的特点有一个全面且清晰的认识。
1.3 目的本文旨在介绍并阐明环形分配器类型在步进电机系统中的作用。
通过对环形分配器的原理和特点进行详细讲解,读者可以更好地理解步进电机系统的运行原理,以及为什么环形分配器是必不可少的组成部分。
此外,本文还将探讨不同类型步进电机的特点,并展望未来环形分配器类型和步进电机发展方向。
以上就是“1. 引言”部分内容,请根据需要进行修改和完善。
2. 正文正文部分将详细介绍环形分配器类型以及它与步进电机之间的关系。
本节将涵盖环形分配器类型的工作原理、结构和特点,以及步进电机的基本原理和应用领域。
在此之前,让我们先了解一下什么是环形分配器类型。
环形分配器类型是指一种特殊的外围装置,用于控制步进电机的旋转方向和速度。
它可以根据输入信号来驱动电机按照预定模式旋转。
环形分配器类型通常由一个或多个传感器和相关控制电路组成。
接下来,我们将关注环形分配器类型的主要特点。
首先,它具有高精度和可靠性,能够实现精确的位置控制和旋转角度测量。
其次,环形分配器类型具有快速响应速度和较低的噪音水平,可以满足高性能应用对转动效果的要求。
此外,它还具有较高的承载能力和抗干扰能力,在恶劣环境条件下依然稳定运行。
然后,我们来看一看环形分配器类型的工作原理。
在操作过程中,传感器将检测到输入信号,并将其转换为电信号,然后通过控制电路将指令传递给步进电机。
根据不同的输入信号,环形分配器可以确定旋转方向和速度,并将步进电机驱动到相应位置或以特定步长旋转。
步进电机结构及工作原理

小步距角的步进电动机
实际采用的步进电机的步距角多为3度和1.5 度,步距角越小,机加工的精度越高。
为产生小步距角,定、转子都做成多齿的, 图中转子40个齿,定子仍是 6个磁极,但每个磁 极上也有五个齿。
13.7 步进电动机
转子的齿距等于360/ 40=9 ,齿宽、齿槽各4.5 。 为使转、定子的齿对齐,定子磁极上的小齿,
由单片机实现脉冲发生器+脉冲分配器的功能
注意:这里的相和三相交流电中的“相”的概念不同。步进 机通的是直流电脉冲,这主要是指线路的联接和组数的区别。
13.7.2 工作原理
三相步进电机的工作方式可分为:三相单三拍、 三相单双六拍、三相双三拍等。
一、三相单三拍
(1)三相绕组联接方式:Y 型 (2)三相绕组中的通电顺序为:
A相B相C相
(3)工作过程
步进电机结 构及工作原
理
步进电动机的种类
通常按励磁方式分为三大类:
1)反应式: 转子为软磁材料,无绕组,定、转子开小齿、步距角小。
2)永磁式: 转子为永磁材料,转子的极数=每相定子极数,不开小齿,
步距角较大,力矩较大 3)永磁感应(混合式):
转子为永磁式、两段,开小齿,转矩大、动态性能好、步距 角小,但结构复杂,成本较高。
齿宽和齿槽和转子相同。
13.7 步进电动机
工作原理:假设是单三拍通电工作方式。
(1)A 相通电时,定子A 相的五个小齿和转子对 齐。此时,B 相和 A 相空间差120,含
120/9 = 13 1 齿 3
A 相和 C 相差240,含240/ 9 = 26 2 个齿。 所以,A 相的转子、定子的五个小齿对齐时3,B 相、 C 相不能对齐,B相的转子、定子相差 1/3 个齿 (3),C相的转子、定子相差2/3个齿(6)。
《步进电机》PPT课件
➢ 当V相通电,U、W相不通电,如图3.3b所示,2、4齿 与V相对齐;
➢ 当W相通电,U、V相不通电,如图3.3c所示,1、3齿 与W相对齐;
整理ppt
8
整理ppt
9
由此可见,当通电顺序为U→V → W→U →V →…时,转子便顺时针方向一步一步地转动,通 电状态每换接一次,转子前进一步,一步对应的 角度称为步距角。
上述两种通电方式的组合。即通电方式为:U → UV → V → VW→W → WU →U →… 称为三相六拍通电,如图3.4所示。 三相六拍通电方式的步距角减小一倍。
整理ppt
13
3.1.2 小步距角步进电动机
实际的小步距角电动机如图3.5所示。它的定子内 圆和转子外圆上均有齿和槽,而且定子和转子的 齿宽和齿距相等。
第3章 步进电动机传动控制
3.1 步进电动机 3.2 步进电动机的环形分配器 3.3 步进电动机的驱动电路
整理ppt
1
步进电动机是一种将电脉冲信号转换成直线或 角位移的执行元件。步进电动机的运动由一系列电脉 冲控制,脉冲发生器所产生的电脉冲信号,通过环形 分配器按一定的顺序加到电动机的各相绕组上。为了 使电动机能够输出足够的功率,经过环形分配器产生 的脉冲信号还需要进行功率放大。
整理ppt
11
(2)通电方式 双相轮流通电方式
每次有两相绕组通电,通电状态切换时,转子转动平稳, 且输出力矩较大,这种通电方式定位精度高而且不易 失步。
以三相反应式电动机为例,双相轮流通电方式为:UV → VW→WU →UV →… 称为三相双三拍通电。
整理ppt
12
(2)通电方式 单双相轮流通电方式
数控技术期末复习题(4套,附答案)

(数控技术期末复习题)一、填空题1、数控机床由输入输出设备、数控装置、伺服系统、测量反馈和机床本体组成。
2、数控装置是数控机床的核心。
它接受来自输入设备的程序和数据,并按输入的信息的要求完成数值计算、逻辑判断和输入输出控制等功能。
3、数控机床分为开环控制的数控机床、闭环控制的数控机床、半闭环控制的数控机床。
4、数控编程的步骤:分析零件确定加工工艺过程、数值计算、编写零件加工程序、制作控制介质、程序校验和试切削。
5、数控机床坐标系确定顺序:Z-X-Y.。
6、数控机床中X尺寸一般采用直径编程。
7、坐标平面指令:G17、G18、G19。
8、圆弧差补指令用R代替I、J、K值。
圆心角小于180度时,R 取正直。
9、数值计算内容:基点和节点计算、刀位点轨迹计算、辅助计算。
10、CMC数控机床的功能分为基本功能和选择功能。
11、刀补过程分为刀补建立、刀补运行、刀补取消。
12、插补算法:脉冲增量插补、数据采样插补。
13、四个工作节拍:偏差判别、紧急计算、偏差计算、终点判别。
14、脉冲分配方法:电路分配法、软件分配法。
环形分配器的作用是将来自CMC的指令脉冲按一定的顺序送主电动机绕组的控制电路。
15、感应同步器是一种电磁式位置检测元件,按其结构特点一般分为直线式和旋转式。
前者用于直线位移测量,后者用于角位移测量。
16、丝杠螺母副可通过垫片调整、螺纹调整、齿差式调整来调整间隙。
二、名词解释1、基点:构成零件轮廓的不同几何素线的交点或切点称为基点。
基点可以直接作为其运动轨迹的起点或终点。
节点:当采用不具备非圆曲线插补功能的数控机床加工非圆曲线轮廓的零件时,在加工程序的编制工作中,常用多个直线段或圆弧去近似代替非圆曲线,这称为拟合处理。
拟合线段的交点或切点称为节点。
2、数控加工:数控加工:是利用一种能自动换刀的数控铣铿床,即工件经一次装夹后能自动完成铣锉钻铰等多工序综合加工,综合加工机对原料作综合加工处理,得到所需形状。
环形分配器

1)首先应该明白步进电机的机构和原理,步进电机一个永磁的转子,转子上有多少不等的槽。定子是一相相的线圈绕组
2)旋转。磁场旋转越快,电机就转动越快
3)步进电机的驱动。就是给各个相轮流分配电压,产生旋转磁场,这样电机才能转动。一般来说,我们给电机通入的是脉冲串,这个脉冲串需要轮流循环的通入到电机各相绕组中,就需要环形分配了,环形分配,一般考驱动器来完成,也就是,你给驱动器通入脉冲串,驱动器会自动环形分配到步进电机各个绕组中去的 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二、 确定复位状态: 以 A B C D-1 0 0 0 复位状态。 三、 设计上电复位和手动复位电路,设置手动复位开关:
四、 通过卡诺图写出逻辑表达式 各卡诺图及逻辑表达式如下图所示:
A’ TAB \CD 000 001 011 010 110 111 101 100 B’ 00 ∅ 1 1 1 1 0 0 ∅ 01 0 ∅ ∅ 0 1 ∅ ∅ 1 11 0 ∅ ∅ ∅ ∅ ∅ ∅ 0 10 0 0 ∅ ∅ ∅ ∅ 0 0 TAB \CD 000 001 011 010 110 111 101 100 00 ∅ 1 0 0 1 1 1 ∅ 01 0 ∅ ∅ 0 0 ∅ ∅ 0 11 0 ∅ ∅ ∅ ∅ ∅ ∅ 0 10 1 1 ∅ ∅ ∅ ∅ 0 0
D’ 00 ∅ 0 0 0 0 0 1 ∅ 01 1 ∅ ∅ 0 0 ∅ ∅ 0 11 1 ∅ ∅ ∅ ∅ ∅ ∅ 0 10 1 0 ∅ ∅ ∅ ∅ 1 1 TAB CD 000 001 011 010 110 111 101 100 00 ∅ 0 0 1 0 0 0 ∅ 01 1 ∅ ∅ 1 0 ∅ ∅ 1 11 0 ∅ ∅ ∅ ∅ ∅ ∅ 1 10 0 0 ∅ ∅ ∅ ∅ 0 1
������ ′ = ������������������ ∙ ������������������ ∙ ������������������ ������ ′ = ������������ ������ ∙ ������������������ ∙ ������������������
五、 作逻辑图
������′ = ������������ ������ ∙ ������������ ������ ∙ ������������������������′ = ������������������ ∙ ������������������ ∙ ������������ ������
C’ TAB\ CD 000 001 011 010 110 111 101 100
正反转 T 1 1 1 1 1 1 1 1 0 0 0 0 0 0 0 0 原状态 ABCD 1000 1100 0100 0110 0010 0011 0001 1001 1000 1001 0001 0011 0010 0110 0100 1100 次状态 A’ B’ C ’ D’ 1100 0100 0110 0010 0011 0001 1001 1000 1001 0001 0011 0010 0110 0100 1100 1000
大作业题目及具体内容 设一由环形分配器、驱动电路和四相反应式步进电机组成的开环控制系统, 试设计该系统的环形分配器,实现以下功能: (1) 步进电机组成的开环控制系统具有上电复位和手转控制功能; 具体设计步骤如下: 一、 四相八拍步进电机励磁状态转换表: