GPS测量编码表
北斗-GPS模块数据格式定义-科愗20141231

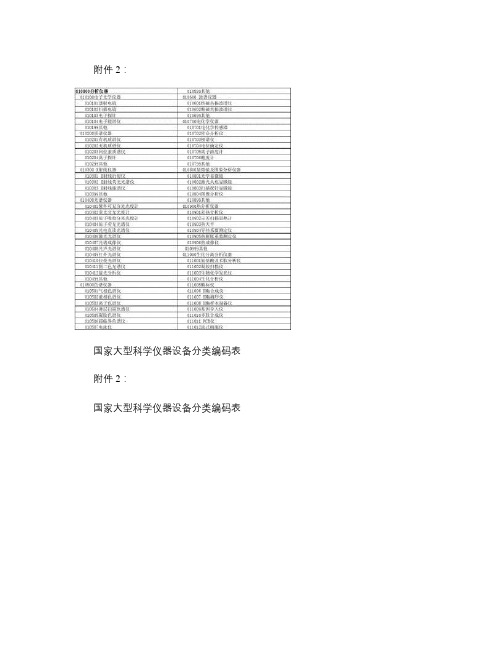
表 GPS/BD 模块数据编码格式二进制通信为异步串行通信,3.3V TTL 电平,1200波特率,1位起始位,8位数据位,1位停止位,偶校验。
数据包更新率为1Hz 。
定位信息(TXD )输出760ms 后发出脉宽为2ms 的负脉冲触发信号(GPIO ) TXD 和GPIO 分别由两个PIN 输出,包括电源共使用4个PIN 。
字节位置 定义单位类型 说明 1-2 码组标识符Uchar 帧头EB3A 3 UTC 时间: 小时 hour Uchar Hour4 UTC 时间: 分钟minute Uchar秒数据为0~599(扩大10倍),占10位,需要与分钟的字节合并,分钟为0~59,占6位,将秒的2位移至分钟的第7~8位上(高比特位的2位)。
5UTC 时间: 秒second Uchar 6 定位状态 N/A Uchar 0/1(0表示不定位,1表示定位) 7-10经度radiansfloat-π to π(正数表示东经,负数表示西经)4个字节,低字节在前,高字节在后,float 数据类型,是弧度值。
11-14 纬度 radians float-π/2 to π/2(正数表示北纬,负数表示南纬)4个字节,低字节在前,高字节在后,float 数据类型,是弧度值。
15-18 海拔高度 m int 0~600000(比例因子是10)4个字节,低字节在前,高字节在后, 19-20 北向速度 m/s short 比例因子为100,精度为0.01m/s ,范围是-327.68m/s 到327.67m/s 。
2个字节,低位字节在前,高位字节在后 21-22 东向速度 m/s short 23-24 垂向速度 m/s short 25 卫星数 N/A Uchar 接收到卫星数(GPS+BD 最多24) 26PDOP 精度0.1 N/AUchar定位精度因子(饱和值为25.5,即如果大于25.5时,输出值为25.5。
国家大型科学仪器设备分类编码.
GPS授时的IRIG-B(DC)码编码设计与实现
GPS授时的IRIG-B(DC)码编码设计与实现Time:2013-03-14 03:28:03 Author:唐彬 Source:安徽理工大学电气与信息工程学院关键字:IRIG-B(DC)码编码设计引言随着科学技术的迅速发展,各种电子技术对于时间的精度要求也越来越高。
因此作为高精度的全球定位系统和授时系统,GPS技术得到了广泛的运用,由于其精度可以达到μs级,所以其在很多设备中都作为精确的授时源,因此很多公司都推出了基于GPS的同步对时装置。
时间码IRIG-B作为一种重要的时间同步传输的方式,以其突出的优越性能,成为时统设备首选的标准码,在靶场测量、工业控制、电力系统测量与保护、计算、通信、气象等重要行业及领域得到了广泛的应用。
FPGA以其对时钟的同步性、灵活性、功耗低、效率高和抗干扰性等特点得到广泛运用。
本设计采用Altera 的EP2C8Q208器件,通过对GPS OME接收过来的$GPRMC码流进行处理,做成一个GPS采集器,再将时间信号提取出后转变成适合DC码编码的时间码,再将这些时间信号发出。
系统总体的硬件设计GPRMC数据流简介GPRMC是一种运输定位数据,其属于NMEA 0813,具有最小数据量的GPS信息。
该码流采用的是ASCII 码,以$GPRMC为起始位,CR和LF为结束位,内部包含了:UTC时间、定位状态、维度、维度半球、经度、经度半球、UTC日期等。
IRIG-B码简介IRIG(Inter Range Instrumentation Group)是美国靶场司令部委员会的下属机构,称为“靶场时间组”。
在靶场中随着设备对所需信息量的增加,对标准化时统设备的要求也越来越高,IRIG-B码以其优越的性能成为首选。
IRIG-B码是一种串行时间码,与并行传输方式相比,其物理连续简单、传输距离远、接口标准化。
IRIG-B码包含两种方式:DC码(直流码)和AC码(交流码)。
DC码适应于短距离传输,AC码适应于长距离传输。
GPS编码格式及C语言解码

GPS编码格式及C语⾔解码有关磁偏⾓和地图定位的问题:地图的⽅向:上北、下南、左西、右东是⼤多数地图的⽅向,但这可不是通⽤原则,如果地图上有⽅向标,可以通过⽅向标了解到这些。
地磁极是接近南极和北极的,但并不和南极、北极重合,⼀个约在北纬72°、 西经96°处;⼀个约在南纬70°、东经150°处。
磁北极距地理北极⼤约相差1500km。
现在磁北极的位置在加拿⼤北⽅,在⼀天中磁北极的位置也是不停的变动,它的轨迹⼤致为⼀椭圆形,磁北极平均每天向北以40m。
⽬前磁北极正在逐渐离开加拿⼤,⼤约于2005年进⼊俄罗斯境内。
东经25度地区,磁偏⾓在1-2度之间;北纬25度以上地区,磁偏⾓⼤于2度;若在西经低纬度地区,磁偏⾓是5-20度;西经45度以上,磁偏⾓为25-50度。
在我国,正常情况下,磁偏⾓最⼤可达6度,⼀般情况为2-3度。
在我国除部分磁⼒异常的地⽅外,⼀般磁偏⾓都是西偏。
磁偏⾓还是不断有规律变化的,地图上的磁偏⾓只是测图时的磁偏⾓(磁北⽐真北偏左,加上磁偏⾓;磁北⽐真北偏右,减去磁偏⾓;在我国⼀般是加上)。
使⽤地图本⾝所注的磁偏⾓要注意出版年限,地图太⽼误差较⼤。
GPS 0183协议GGA、GLL、GSA、GSV、RMC、VTG解释$GPGGA例:$GPGGA,092204.999,4250.5589,S,14718.5084,E,1,04,24.4,19.7,M,,,,0000*1F字段0:$GPGGA,语句ID,表明该语句为Global Positioning System Fix Data(GGA)GPS定位信息字段1:UTC 时间,hhmmss.sss,时分秒格式字段2:纬度ddmm.mmmm,度分格式(前导位数不⾜则补0)字段3:纬度N(北纬)或S(南纬)字段4:经度dddmm.mmmm,度分格式(前导位数不⾜则补0)字段5:经度E(东经)或W(西经)字段6:GPS状态,0=未定位,1=⾮差分定位,2=差分定位,3=⽆效PPS,6=正在估算字段7:正在使⽤的卫星数量(00 - 12)(前导位数不⾜则补0)字段8:HDOP⽔平精度因⼦(0.5 - 99.9)字段9:海拔⾼度(-9999.9 - 99999.9)字段10:地球椭球⾯相对⼤地⽔准⾯的⾼度字段11:差分时间(从最近⼀次接收到差分信号开始的秒数,如果不是差分定位将为空)字段12:差分站ID号0000 - 1023(前导位数不⾜则补0,如果不是差分定位将为空)字段13:校验值$GPGLL例:$GPGLL,4250.5589,S,14718.5084,E,092204.999,A*2D字段0:$GPGLL,语句ID,表明该语句为Geographic Position(GLL)地理定位信息字段1:纬度ddmm.mmmm,度分格式(前导位数不⾜则补0)字段2:纬度N(北纬)或S(南纬)字段3:经度dddmm.mmmm,度分格式(前导位数不⾜则补0)字段4:经度E(东经)或W(西经)字段5:UTC时间,hhmmss.sss格式字段6:状态,A=定位,V=未定位字段7:校验值$GPGSA例:$GPGSA,A,3,01,20,19,13,,,,,,,,,40.4,24.4,32.2*0A字段0:$GPGSA,语句ID,表明该语句为GPS DOP and Active Satellites(GSA)当前卫星信息字段1:定位模式,A=⾃动⼿动2D/3D,M=⼿动2D/3D字段2:定位类型,1=未定位,2=2D定位,3=3D定位字段3:PRN码(伪随机噪声码),第1信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段4:PRN码(伪随机噪声码),第2信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段5:PRN码(伪随机噪声码),第3信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段6:PRN码(伪随机噪声码),第4信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段7:PRN码(伪随机噪声码),第5信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段8:PRN码(伪随机噪声码),第6信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段9:PRN码(伪随机噪声码),第7信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段10:PRN码(伪随机噪声码),第8信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段11:PRN码(伪随机噪声码),第9信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段12:PRN码(伪随机噪声码),第10信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段13:PRN码(伪随机噪声码),第11信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段14:PRN码(伪随机噪声码),第12信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段15:PDOP综合位置精度因⼦(0.5 - 99.9) 字段16:HDOP⽔平精度因⼦(0.5 - 99.9)字段17:VDOP垂直精度因⼦(0.5 - 99.9)字段18:校验值$GPGSV例:$GPGSV,3,1,10,20,78,331,45,01,59,235,47,22,41,069,,13,32,252,45*70字段0:$GPGSV,语句ID,表明该语句为GPS Satellites in View(GSV)可见卫星信息字段1:本次GSV语句的总数⽬(1 - 3)字段2:本条GSV语句是本次GSV语句的第⼏条(1 - 3)字段3:当前可见卫星总数(00 - 12)(前导位数不⾜则补0)字段4:PRN 码(伪随机噪声码)(01 - 32)(前导位数不⾜则补0)字段5:卫星仰⾓(00 - 90)度(前导位数不⾜则补0)字段6:卫星⽅位⾓(00 - 359)度(前导位数不⾜则补0)字段7:信噪⽐(00-99)dbHz字段8:PRN 码(伪随机噪声码)(01 - 32)(前导位数不⾜则补0)字段9:卫星仰⾓(00 - 90)度(前导位数不⾜则补0)字段10:卫星⽅位⾓(00 - 359)度(前导位数不⾜则补0)字段11:信噪⽐(00-99)dbHz字段12:PRN 码(伪随机噪声码)(01 - 32)(前导位数不⾜则补0)字段13:卫星仰⾓(00 - 90)度(前导位数不⾜则补0)字段14:卫星⽅位⾓(00 - 359)度(前导位数不⾜则补0)字段15:信噪⽐(00-99)dbHz字段16:校验值$GPRMC例:$GPRMC,024813.640,A,3158.4608,N,11848.3737,E,10.05,324.27,150706,,,A*50字段0:$GPRMC,语句ID,表明该语句为Recommended Minimum Specific GPS/TRANSIT Data(RMC)推荐最⼩定位信息 字段1:UTC时间,hhmmss.sss格式字段2:状态,A=定位,V=未定位字段3:纬度ddmm.mmmm,度分格式(前导位数不⾜则补0)字段4:纬度N(北纬)或S(南纬)字段5:经度dddmm.mmmm,度分格式(前导位数不⾜则补0)字段6:经度E(东经)或W(西经)字段7:速度,节,Knots字段8:⽅位⾓,度字段9:UTC⽇期,DDMMYY格式字段10:磁偏⾓,(000 - 180)度(前导位数不⾜则补0)字段11:磁偏⾓⽅向,E=东W=西字段16:校验值$GPVTG例:$GPVTG,89.68,T,,M,0.00,N,0.0,K*5F字段0:$GPVTG,语句ID,表明该语句为Track Made Good and Ground Speed(VTG)地⾯速度信息字段1:运动⾓度,000 - 359,(前导位数不⾜则补0)字段2:T=真北参照系字段3:运动⾓度,000 - 359,(前导位数不⾜则补0)字段4:M=磁北参照系字段5:⽔平运动速度(0.00)(前导位数不⾜则补0)字段6:N=节,Knots字段7:⽔平运动速度(0.00)(前导位数不⾜则补0)字段8:K=公⾥/时,km/h字段9:校验值GPS编码格式及C语⾔解码GPS接收机只要处于⼯作状态就会源源不断地把接收并计算出的GPS导航定位信息通过串⼝传送到计算机中。
卫星导航电文讲解

卫星导航电文讲解本文内容大纲如下:∙GPS信号讲解∙GPS的导航电文讲解∙GLONASS信号∙GLONASS信号构成∙GLONASS导航电文∙Galileo信号∙Galileo 信号构成∙Galileo导航电文∙北斗∙北斗信号构成∙北斗导航电文●GPS信号讲解GPS卫星传输的信号主要由三个部分组成:∙载波∙测距码(伪随机码)∙导航电文每颗卫星使用两种不同的测距码来对导航电文进行扩频:∙粗略码(C/A),也称为民码,免费提供给全球用户使用,∙精细码(P),也称为军码,主要用于政府和军事机构中的高精度应用。
∙C/A码是长度为1,023 比特的伪随机码,传输速率为1.023 Mbps,即每毫秒重复一次。
GPS 系统采用码分多址技术,每颗卫星使用不同C/A 码,在同一频率上传输信号,接收机通过对C/A码的识别来确定信号来自哪颗卫星。
∙P码是码长为6.1871 x 1012 比特的伪随机码,传输速率为10.23 Mbps,P码的周期很长,每周重复一次。
自1994年起,为了反电子欺骗,P码被W码加密得到Y码,通常称为P (Y)码,仅限于军事应用。
导航电文,经测距码扩频后,调制到射频载波上。
L1 载波1575.42 MHz 频带上同时调制了C/A和P(Y)码信号。
L2载波1227.6 MHz 频带上只调制了P(Y)码信号。
●GPS的导航电文讲解导航电文由一个含有37,500比特的主帧组成,传输速率为50bps,电文的传送时间为12.5 min。
主帧分成25个页面或帧,每帧由5个子帧构成,包括时间和钟差改正数、卫星健康状况、当前卫星的星历或精密的轨道信息、以及一部分历书(包含所有卫星粗略轨道信息)。
接收机接收每颗卫星的星历数据,来确定卫星的位置。
它还需要传输时间和钟差改正数来计算伪距,进而确定接收机的位置。
这些信息在前三个子帧中传输,接收机至少需要16秒(在最坏情况下是30秒)来获取这些必要信息。
GPS的导航电文以帧的形式编排为比特流,每一帧为1500比特,这1500比特又分为5个子帧,每个子帧为300比特。
GPS的数据格式介绍

GPS的数据格式介绍GPRMC(建议使用最小GPS数据格式)$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11><CR><LF>1) 标准定位时间(UTC time)格式:时时分分秒秒.秒秒秒(hhmmss.sss)。
2) 定位状态,A = 数据可用,V = 数据不可用。
3) 纬度,格式:度度分分.分分分分(ddmm.mmmm)。
4) 纬度区分,北半球(N)或南半球(S)。
5) 经度,格式:度度分分.分分分分。
6) 经度区分,东(E)半球或西(W)半球。
7) 相对位移速度, 0.0 至 1851.8 knots8) 相对位移方向,000.0 至 359.9度。
实际值。
9) 日期,格式:日日月月年年(ddmmyy)。
10) 磁极变量,000.0 至180.0。
11) 度数。
12) Checksum.(检查位)GPGSV(所示卫星格式)$GPGSV, <1>,<2>,<3>,<4>,<5>,<6>,<7>,?<4>,<5>,<6>,<7>,<8><CR><LF>1) 天空中收到讯号的卫星总数。
2) 定位的卫星总数。
3) 天空中的卫星总数,00 至 12。
4) 卫星编号, 01 至 32。
5) 卫星仰角, OO 至 90 度。
6) 卫星方位角, OOO 至 359 度。
实际值。
7) 讯号噪声比(C/No), 00 至 99 dB;无表未接收到讯号。
8) Checksum.(检查位).第<4>,<5>,<6>,<7>项个别卫星会重复出现,每行最多有四颗卫星。
(完整)4 GPS定位的观测量和观测方程

第四章GPS定位的观测量和观测方程GPS定位要解决两个问题:一是观测瞬间GPS卫星的空间位置。
解决方法:通过导航电文中的卫星星历来确定。
(前已述)二是测站点卫星之间的距离。
解决方法:通过测定信号传播时间计算.传播时间通过GPS的观测量计算的.4。
1 GPS的主要观测量主要观测量:码伪距: C1、P1、P2载波相位:L1、L2多普勒 D1、D2即:1)L1载波相位观测值(L1)2)L2载波相位观测值(L2)3)调制在L1上的C/A-code伪距(C1)4)调制在L1上的P-code伪距(P1)5)调制在L2上的P—code伪距(P2)6) L1载波Dopple观测值(D1)7) L2载波Dopple观测值(D1)在 RINEX 2。
10 中,定义了下列观测值类型:L1,L2:L1 和 L2 上的相位观测值;C1:采用L1上 C/A 码所测定的伪距;P1, P2:采用L1、L2 上的 P 码所测定的伪距;D1 , D 2:L1 和 L2 上的多普勒频率;T1, T2:子午卫星的150( T1)和400 MHz( T2) 信号上的多普勒积分;S1, S2: 接收机所给出的 L1、L2 相位观测值的原始信号强度或 SNR 值。
在反欺骗( AS) 之下所采集的观测值将被转换为“L2"或“P2",并将失锁指示符( 见表9-2) 的第二位置1。
观测值的单位:载波相位为周, 伪距为 m,多普勒为 Hz,子午卫星为周, SNR 等则与接收机有关。
【例】载波GPS使用两种载波:L1载波:fL1=154×f0=1575。
42MHz,波长λ1=19.032cm,L2载波:fL2=120×f0=1227。
6MHz,波长λ2=24。
42cm。
载波的作用:1、在无线电通信技术中,为了有效地传播信息,都是将频率较低的信号加载在频率较高的载波上,此过程称为调制.然后载波携带着有用信号传送出去,到达用户接收机。
仪器设备分类编码表
仪器设备分类编码表引言为了保证仪器设备的统一管理、使用、保养以及查询,制定一套规范的分类编码表是非常必要的。
本文档介绍了一套常用的仪器设备分类编码表,涵盖了常见的各类仪器设备。
仪器设备分类编码表以下是常用的仪器设备分类编码表:一、分析测量类1. 实验室分析仪器• 1.1 光学分析仪器– 1.1.1 紫外可见分光光度计– 1.1.2 红外分光光度计– 1.1.3 原子吸收光谱仪– 1.1.4 荧光分析仪• 1.2 气体分析仪器– 1.2.1 气相色谱仪– 1.2.2 电化学分析仪– 1.2.3 质谱仪• 1.3 液相分析仪器– 1.3.1 高效液相色谱仪– 1.3.2 毛细管电泳仪– 1.3.3 滴定仪2. 物理测量仪器• 2.1 电学类仪器– 2.1.1 万用表– 2.1.2 示波器– 2.1.3 信号源• 2.2 热学类仪器– 2.2.1 热电偶– 2.2.2 热像仪• 2.3 光学类仪器– 2.3.1 激光测距仪– 2.3.2 光谱仪• 2.4 磁学类仪器– 2.4.1 磁力计– 2.4.2 磁敏电阻• 2.5 机械类仪器– 2.5.1 变形测量仪– 2.5.2 速度测量仪– 2.5.3 加速度计二、生命科学类1. 医学影像设备• 1.1 X线类– 1.1.1 通用型X线机– 1.1.2 数字减影血管造影仪• 1.2 磁共振类– 1.2.1 核磁共振仪• 1.3 超声影像类– 1.3.1 彩色多普勒超声仪– 1.3.2 磁共振影像系统2. 生命科学实验仪器• 2.1 分子生物学类– 2.1.1 PCR仪– 2.1.2 基因测序仪– 2.1.3 DNA电泳仪• 2.2 细胞生物学类– 2.2.1 细胞培养箱– 2.2.2 细胞离心机– 2.2.3 流式细胞仪三、工程本体类1. 工程检测类• 1.1 环境检测类– 1.1.1 环境监测站– 1.1.2 大气污染检测仪– 1.1.3 声级计• 1.2 材料检测类– 1.2.1 金相显微镜– 1.2.2 硬度计– 1.2.3 强度试验机• 1.3 压力检测类– 1.3.1 压力表– 1.3.2 压力传感器– 1.3.3 压力校验器2. 工程测量类• 2.1 测绘器具类– 2.1.1 GPS– 2.1.2 接触式直角仪– 2.1.3 测量带• 2.2 建筑测量类– 2.2.1 光电测距仪– 2.2.2 倾斜传感器– 2.2.3 建筑激光测距仪总结本文档介绍了一套常用的仪器设备分类编码表,涵盖了常见的各类仪器设备。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
12 GPS 测量编码表
1、测桩:Code + 桩名
Code 含义1=直线桩2=转角桩
2、测点:Code
Code 含义
91=普通点92=危险点93=风偏点94=边线点95=临时点96=山包点
3、测路:Code±地物宽度±测点路基高度±交叉角度/ 方向点号±另侧路基高度±内沿宽度【一点测量】Code T 路的对边点号±测点路基高度±交叉角度/方向点号±另侧路基高度±内沿宽度【二点测量】
Code 含义
71=路72=铁路73=大车路74=大车路(非标准) 75=一级公路76=二级公路77=三级公路78=四级公路79=高速公路80=地面管道81=堤坝82=窄轨铁路83=电气化铁路84=电车道85=宽垄86=公路87=群坟
4、测沟河:
Code<A/B>±地物宽度±测点沟/河深度±交叉角度/方向点号±内沿宽度【一点测量】
Code T<A/B>沟/河的对边点号±沟/河深(高)度±交叉角度/方向点号±内沿宽度【二点测量】
注:<A/B>仅当需要输入水流方向时输入,A—水流向上,B—水流向下
Code 含义
61=河流62=沟(双线) 63=沟64=深沟65=河流(不通航) 66=渠67=干沟68=沟,渠
5、测塘类:
45±宽度±长度【一点测量】或45T塘对边点号±长度【二点测量】
6、测坡坎:Code±高±交叉角度/方向点号±倾斜宽度
Code 含义:52=坡53=垄54=田埂56=坎
7、测架空地物:
Code <A/B> ±顶点高/顶点点号/X±交叉角度/方向点号±架空线类杆型/树类宽度
注:A—杆高点B—最低点,无此项表示为最高线高点;杆型指架空线类地物。
Code 含义
9=树10=围墙11= 一般管道12=索道13=渡槽14=特殊管道15=果树16=坟17=经济林20=220V 21=380V 22=10kV 23=35kV 24=110kV 25=220kV 26=通讯线27=一级通讯线28=二级通讯线29=三级通讯线30=四级通讯31=500kV(AC) 32=500kV(DC) 33=66kV 34=154kV 35=330kV 36=架空光缆37=架空电缆38=电车承力索39=铁路承力索40=弱电线路
8、测房:
Code <A/B>±房宽±房高/房顶点+房左边长+房右边长±交叉角度/方向点号【一点测量】
Code <A/B/C/D >+已知点2±房宽(长)±房高/房顶点【两点测量】
Code <E/F>±已知点2±房宽(长)/已知点3±房高/房顶点【多点测量】
注:A—一点测尖顶房B—一点测平顶房C —两点尖顶房D—两点平顶房E—多点测尖顶房F—多点测平点房Code 含义
107=房108=大棚109=民房110=砖房111=仓库112=房基113=菜窖
9、测地下地物:
Code+地物埋深(正数)±交叉角度/方向点号
Code 含义
100=地下电缆101=地下通讯线102=地下管道103=地下光缆104=地下油罐105=地下水管106=地下天然气管。