2-匹配滤波器2013
《匹配滤波器》课件
本课件介绍匹配滤波器的原理、应用和举例。通过深入剖析匹配滤波器,让 您轻松掌握这一重要概念,并了解其在目标检测和跟踪中的广泛应用。
匹配滤波器简介
1 什么是匹配滤波器
匹配滤波器是一种用于信号处理的滤波器, 通过与目标信号进行卷积,寻找与模板匹配 的特征。
2 匹配滤波器的作用
匹配滤波器可以用于目标检测、跟踪和模式 识别等领域,提高信号处理的准确性和效率。
匹配滤波器实现卡通头像换脸
匹配滤波器可以应用于卡通头像的换脸,将不同的 表情特征匹配到卡通图像中。
匹配滤波器总结
匹配滤波器的优缺点
匹配滤波器具有高准确性和灵活性,但对输入信号和模板的匹配度要求较高。
发展趋势
未来匹配滤波器有望在深度学习和人工智能领域得到更广泛的应用,提升各种信号处理任务 的性能。
匹配滤波器在目标检测和跟配滤波器可以用于目标匹配, 比如在图像中匹配特定模式或 形状的目标。
人脸识别
匹配滤波器在人脸识别中也有 应用,可以通过匹配脸部特征, 实现准确的人脸识别。
匹配滤波器举例
使用匹配滤波器进行数字识别
通过匹配滤波器,可以实现对手写数字的识别,提 高数字识别的准确性和鲁棒性。
匹配滤波器原理
1
信号与匹配滤波器卷积
匹配滤波器通过与输入信号进行卷积,
边缘响应
2
寻找信号中与模板匹配的部分。
匹配滤波器可以通过配置合适的模板,
准确地定位信号中的边缘信息。
3
匹配滤波器矩阵
匹配滤波器可以通过图像处理技术构建 一个矩阵,用于匹配信号与模板的相似 度。
匹配滤波器应用
匹配滤波器在目标检测和 跟踪中的应用
LFM脉压信号的匹配滤波器分析

时间 / μs
图 2 线性调频信号匹配输出图
匹配滤波器的输出信噪比达到最大值的时刻必须在输入信号全部结束之后, 即 t=t0=20μs 时获得信噪比最大输出。
3.3 脉压信号性能改善
下图为单载频脉冲和 LFM 脉压信号经过匹配滤波之后得到的模糊函数图像。
图 3 单载频脉冲与 LFM 脉压信号的模糊函数
电子与信息工程学院 13S 电子 2 班
d
a
13S105025 郑薇
i
r
e
指导教师: 设计时间:
2013-12-16
哈尔滨工业大学
信号检测理论课程实验报告 ——————————————————————————————————————————————
一、设计内容
在雷达信号处理中,距离分辨率的大小反比于脉冲宽度,而速度分辨率正比 于脉冲宽度。根据模糊函数理论,在实现最佳处理并保证一定信-噪比的前提下, 测量精度和分辨力对信号时宽和带宽的要求是一致的。 简单脉冲信号要想有高的 距离分辨率或者测距精度,就要求脉冲宽度很窄,而此时的速度分辨率和测速精 度会变的很差,反之亦然。简单脉冲信号不能同时提供距离和速度二维的高分辨 力及高测量精度。 由 WoodWard 的分辨理论可知:为保证测距精度和距离分辨力,要求信号具 有大的带宽;为保证测速精度和速度分辨力,要求信号具有大的时宽。由雷达方 程可知,为了提高目标发现能力,要求信号具有大的脉宽以提高发射能量。综合 上述要求,要提高雷达系统的发现能力、测量精度和分辨能力,要求雷达信号具 有大的时宽、带宽和能量, 由于能量正比于时宽,因此归根结底需要一种大时 宽-带宽积信号。 考虑一个宽脉冲信号,它具有较高的速度分辨率,还有利于克服峰值功率限 制,充分利用发射设备的平均功率,提高信号能量。对该信号进行某种调制, 根 据傅里叶变换关系,将会改变信号的频谱结构(带宽)。例如:脉内进行调频可以增 加信号的带宽,从而具备了同时提高信号的距离分辨率和速度分辨能力的可能。 大时宽带宽的信号怎样处理才能获得高的距离和速度分辨力呢? 匹配滤波理论指出: 无论信号的相位函数如何,只要经过匹配处理,信号的 非线性的相位都能得到“消除” ,或者叫校准,输出只保留线性相位,这样信号 的幅度谱只要是宽的,由傅里叶变换的关系可知,经过匹配处理必然在时域输出 一个很窄的响应。 在匹配滤波理论指导下, 线性调频脉冲以及二相编码等大时宽-带宽积信号先 后被提出;一个宽脉冲经过匹配滤波变成一个窄脉冲,因此这种大时宽-带宽积 信号也被称为脉冲压缩信号,简称脉压信号。 匹配滤波器在信号检测以及雷达脉冲信号压缩等领域具有非常广泛的应用, 本实验主要针对线性调频信号设计此信号的匹配滤波器, 并求得匹配滤波器的脉 冲响应及输出波形。
匹配滤波器原理

数字通信课程设计匹配滤波器摘要在通信系统中,滤波器是重要的部件之一,滤波器特征的选择直接影响数字信号的恢复。
在数字信号接收中,滤波器的作用有两个方面,使滤波器输出有用信号成分尽可能强;抑制信号带外噪声,使滤波器输出噪声成分尽可能小,减少噪声对信号判决的影响。
对最佳线性滤波器的设计有一种准则是使滤波器输出信噪比在特定时刻到达最大,由此导出的最佳线性滤波器称为匹配滤波器。
在数字通信中,匹配滤波器具有广泛的应用。
因此匹配滤波器是指滤波器的性能与信号的特征取得某种一致,使滤波器输出端的信号瞬时功率与噪声平均功率的比值最大。
本文设计并仿真了一种数字基带通信系统接收端的匹配滤波器。
一、课程设计的目的通过本次对匹配滤波器的设计,让我们对匹配滤波器的原理有更深一步的理解,掌握具体的匹配滤波器的设计方法与算法。
二、课程设计的原理设接收滤波器的传输函数为H (f),冲击响应为h(t),滤波器输入码元s(t)的持续时间为T s,信号和噪声之和r(t)为r(t) s(t) n(t) 0 t T s式中,s(t)为信号码元,n(t)为白噪声。
并设信号码元s(t)的频谱密度函数为S(f),噪声n(t)的双边功率谱密度为P n n o/2 , n o为噪声单边功率谱密度。
假定滤波器是线性的,根据叠加定理,当滤波器输入信号和噪声两部分时,滤波器的输出也包含相应的输出信号和输出噪声两部分,即y(t) S o(t) n o(t)由于:&(f) H*(f)H(f )P R(f) |H(f)2P R(f)PJf)为输出功率谱密度,P R(f)为输入功率谱密度,P R(f) n。
/2这时的输出噪声功率N o等于N o H⑴气f于H⑴2df在抽样时刻t o上,输出信号瞬时功率与噪声平均功率之比为为了求出「0的最大值,利用施瓦兹不等式求「0的最大值在白噪声干扰的背景下,按上式的设计的线性滤波器,将能在给定时刻t 0上获得最大输出信噪比2E n 0。
匹配滤波器
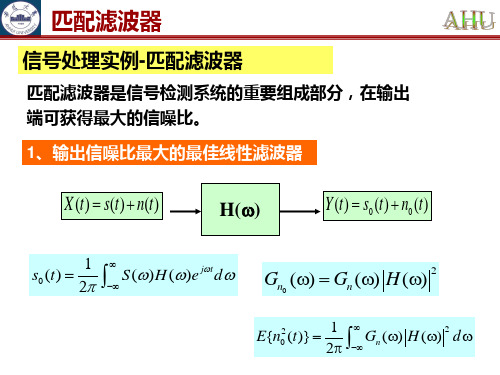
信号处理实例-匹配滤波器 信号处理实例 匹配滤波器
匹配滤波器是信号检测系统的重要组成部分, 匹配滤波器是信号检测系统的重要组成部分,在输出 端可获得最大的信噪比。 端可获得最大的信噪比。 1、输出信噪比最大的最佳线性滤波器 、
X(t) =s(t) +n(t)
1 s0 (t ) = 2π
H(ω) ω
取匹配滤波器的时间t 取匹配滤波器的时间 0= τ
ca ca jωτ − jωτ 匹配滤波器为 H (ω) = (1 − e )e = (1 − e− jωτ ) − jω jω
冲激响应为
h(t ) = cs (t )
匹配滤波器
匹配滤波器的输出信号
ca 2t 2 s0 (t ) = s (t ) ⊗ h(t ) = cs (t ) ⊗ s (t ) = ca (2τ − t ) 0
2 s0 (t0 ) d0 = 2 E[n0 (t )]
∞ 2
1 d0 = 2π
∫ ∫
−∞ ∞
S (ω) H (ω)e
jωt0
dω
−∞
Gn (ω) H (ω) d ω
2
设计一个线性系统,使得输出的信噪比达到最大。 设计一个线性系统,使得输出的信噪比达到最大。
匹配滤波器
利用许瓦茨不等式 等号条件
∫
∞
− st0
1 1 1 S ( s) = − = 1/ 2 + s 1 + s (1 + 2 s )(1 + s )
c = e − st0 1 − 2s
c ( t ห้องสมุดไป่ตู้ t0 ) / 2 e h2 (t ) = 2 0
−∞ < t ≤ t0 t > t0
2.3匹配滤波器

为了满足上式的条件必须有
上式条件说明,对于一个物理可实现的匹配滤波器,其输入 信号s (t )必须在它输出最大信噪比的时刻 t 0之前结束。也就 是说,若输入信号在T 时刻结束,则对物理可实现的匹配滤 波器, t 0≥ T 。对于接收机来说, t 0是时间延迟,通常总是 希望时间延迟尽可能小,因此一般情况可取t 0 = T 。 四 匹配滤波器输出 匹配滤波器的输出信号为
h ( t ) = cos ω 0 t 0 ≤ t ≤τ ∞ s0 (t ) = ∫−∞ s(t ′)h(t − t ′)dt ′
t cos ω 0 t 2 = [( 2τ − t ) / 2 ] cos ω 0 t 0 0≤t <τ
τ ≤ t ≤ 2τ
其他 t
s0 (t )
2.3 匹配滤波器
一 匹配滤波器原理
滤波器的作用有两个方面 使滤波器输出有用信号成分尽可能强; 抑制信号带外噪声,使滤波器输出噪声成分尽可能小,减小 噪声对信号判决的影响。 通常对最佳线性滤波器的设计有两种准则: 使滤波器输出的信号波形与发送信号波形之间的均方误差最 小,由此而导出的最佳线性滤波器称为维纳滤波器; 使滤波器输出信噪比在某一特定时刻达到最大,由此而导出 的最佳线性滤波器称为匹配滤波器。
式中, R (t )为 输入信号s (t )的 自相关函数。
上式表明,匹配滤波器的输出波形是输入信号s (t )自相关函数 的K 倍。因此,匹配滤波器可以看成是一个计算输入信号自相 关函数的相关器,其在t 0时刻得到最大输出信噪比 由于输出信噪比与常数K 无关,所以通常取K = 1 。
例:试求与射频脉冲波形匹配的匹配滤波器之特性,并 确定其输出波形。
h(t ) = s(t0 − t ) = cosω0 (t0 − t ) 0 ≤ t ≤ τ = cosω0 (τ − t ) 0 ≤ t ≤ τ
转匹配滤波器及其在雷达信处理中的应用

延迟了
白噪声加性干扰环境
匹配滤波器的主要特性
匹配滤波器的适应性
匹配滤波器的幅频特性与输入信号一致,仅 相差常数倍c;相频特性与输入信号的相位谱 反相,且有附加相移量-ωt0。
Input : S () | S () | e js () H () | H () | e j () c | S ( ) | e[ js ()t0 ] | H () | c | S() |,() [s () t0 ]
如果输入信号s(t)的能量为Es,白噪声n(t)的功率
谱为Pn () N0 / 2,则MF的输出功率信噪比为
SNRo
2Es No
它与输入信号s(t)的能量Es有关,而与s(t)的
波形无关
白噪声加性干扰环境
匹配滤波器的主要特性
匹配滤波器的输出功率信噪比
在所有线性滤波器中,匹配滤波器能给出最 大峰值信噪比,它只取决于输入信号能量和 白噪声功率谱密度,而与输入信号形状和噪 声分布规律无关。
应用Schwarz不等式
1
2
F*(t)Q(t)dt
1
F *(t)F (t)dt 1
Q*(t)Q(t)dt
2
2
2
其中,F (t)和Q(t)为两个复数函数,当且仅当满足
Q(t) F (t)
等号成立,为任意非零常数。
令 F *() S ()e jto Pn ()
and Q() Pn ()H ()
输入和输出 信号的频谱
函数
S() s(t)e jtdt
So () H ()S()
so (t)
1
2
H ()S()e jtd
匹配滤波器设计
数字匹配滤波器的设计

数字信号课外作业数字匹配滤波器的设计在数字通信系统中,最常用的准则是最大输出信噪比准则,在此准则下获得的最佳线性滤波器叫做匹配滤波器1.匹配滤波器原理在通信系统中,若接收机输入信噪比相同,所设计的接收机的输出信噪比最大,则能够最佳地判决出有用信号,从而可以得到系统最小误码率,这就是最大输出信噪比准则。
在数字通信系统里,可在接收机内采用一种线性滤波器,当加噪信号通过它时,使其中有用信号加强并使噪声衰减,并在采样时刻使输出信号的瞬时功率与噪声平均功率之比达到最大,这种线性滤波器称为匹配滤波器。
设接收滤波器的传输函数为H(w),滤波器输入为 r(t)=s(t)+n(t) ⑴式中,s(t)为输入有用信号,其频谱为S(w);n(t)为高斯白噪声。
由于线性滤波器满足叠加原理,因此滤波器输出为y(t)=s0(t)+n0(t) ⑵式中,s0(t)和n0(t)分别为s(t)和n(t)单独通过此滤波器的输出。
由线性系统最大响应原理,设K为常数,可以导出当接收滤波器满足H R(ω)= K S*(ω)e−jωt0⑶时,滤波器输出信噪比最大。
即当一个线性相位滤波器传输函数等于输入信号频谱复共轭时,称为匹配滤波器。
2.匹配滤波器设计由无码间干扰(奈奎斯特准则)和最佳接收机原理可以导出,在理想信道的数字通信系统中,若接收和发送滤波器传输函数分别为H R (f)和H T (f),而且有S(f)=H R (f)H T (f) ⑷ 时,则系统无码间干扰,并可实现最佳接收。
在实用中,发送端输入信号频谱常用升余弦函数 S(f)={T, 0≤|ω|≤(1−a)/2T T 2{1+cos[π T a(|f|−1−a 2T)]}1−a 2T< |f| ≤1+a2T0, |f| >1+a 2T⑸式中,T 为脉冲间隔,0< a ≤1为频谱滚降系数,ω=2πf图为按⑷和(5)式设计并用MATLAB 程序实现频率特性为HR(f)和HT(f)的滤波器,其中HR(f)是HT(f)的匹配滤波器。
南京理工大学雷达原理13年A卷
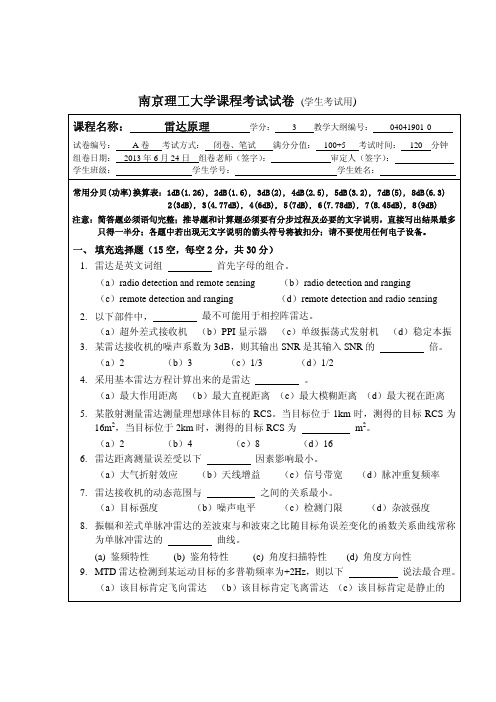
南京理工大学课程考试试卷(学生考试用)课程名称: 雷达原理 学分: 3教学大纲编号: 04041901-0试卷编号: A卷 考试方式: 闭卷、笔试 满分分值: 100+5 考试时间: 120分钟组卷日期: 2013年6月24日 组卷老师(签字): 审定人(签字):学生班级: 学生学号: 学生姓名:常用分贝(功率)换算表:1dB(1.26), 2dB(1.6), 3dB(2), 4dB(2.5), 5dB(3.2), 7dB(5), 8dB(6.3)2(3dB), 3(4.77dB), 4(6dB), 5(7dB), 6(7.78dB), 7(8.45dB), 8(9dB)注意:简答题必须语句完整;推导题和计算题必须要有分步过程及必要的文字说明,直接写出结果最多只得一半分;各题中若出现无文字说明的箭头符号将被扣分;请不要使用任何电子设备。
一、 填充选择题(15空,每空2分,共30分)1.雷达是英文词组 首先字母的组合。
(a)radio detection and remote sensing (b)radio detection and ranging(c)remote detection and ranging (d)remote detection and radio sensing2.以下部件中, 最不可能用于相控阵雷达。
(a)超外差式接收机(b)PPI显示器(c)单级振荡式发射机(d)稳定本振3.某雷达接收机的噪声系数为3dB,则其输出SNR是其输入SNR的 倍。
(a)2 (b)3 (c)1/3 (d)1/24.采用基本雷达方程计算出来的是雷达。
(a)最大作用距离(b)最大直视距离(c)最大模糊距离(d)最大视在距离5.某散射测量雷达测量理想球体目标的RCS。
当目标位于1km时,测得的目标RCS为16m2,当目标位于2km时,测得的目标RCS为m2。
(a)2 (b)4 (c)8 (d)166.雷达距离测量误差受以下 因素影响最小。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
G n (ω )
e
jω ( t − t 0 )
dω
输出信号值最大,是波形的尖峰
S H (ω ) = c G
∗
n
(ω ) e (ω )
− jω t0
物理意义
幅频特性:
H (ω ) = c
S (ω ) G
n
(ω )
输入信号中,幅度大的频率成分,输出信号中该 频率成分也大.或者说.此滤波器的作用是对输入 信号中较强的频率成分给予较大的加权,对较弱的 频率成分给予较小的加权. 由于信号中混叠了噪声,因此滤波器的这个特 性可以从噪声中最佳地滤出有用信号,而这种加权 方式也就是最有效的加权方式.
2
输出信噪比最大的线性滤波器
x (t ) = s (t ) + n (t )
y (t ) = s 0 (t ) + n 0 (t )
输入信号的频谱:
S (ω ) = ∫ s (t )e
−∞
∞
− jω t
dt
jω t
输出信号:
1 s 0 (t ) = 2π
∫
∞
−∞
S (ω ) H (ω ) e
dω
滤波器输入端的噪声功率谱: 输入端的噪声功率:
0 ≤ t ≤τ
τ ≤ t ≤ 2τ
t < 0, t > 2τ
冲激响应和输出信号的波形
h(t) ca
s0(t)
ca2 τ
0
τ
t
0
τ
2τ
t
匹配滤波器的结构方框图
H (ω ) = cS ∗ (ω )e − jωt0 = c a (1 − e − jωτ ) jω
s (t )
积分器 ca jω
+
s0 (t )
第二章
匹 配 滤 波
引言
• 信号在传递过程中不可避免地要受到自然和人为的各 种干扰,信号检测的目的是用一种最优处理的方法,从 受扰观察中获得所传递的信息。
这种最优处理的方法,有以下主要的特点: ① 最优处理的标准可能是不同的,例如最优的 标准可能是要求获得最大的信噪比,或者是要 求有最小的判决损失等. ② 信号处理的方式与结果,与干扰的形式有关, 也与信号的形式密切相关.
2 2 −∞
∞
• 当且仅当A(ω)正比于B*(ω),即:
A(ω ) = cB (ω )
∗
上式取等号
令
jω t0 1 ∞ S ( ) H ( ) e dω ω ω 2 s0 (t0 ) 2π ∫−∞ = d0 = 2 1 ∞ 2 E n0 (t ) H ( ω ) Gn (ω )dω 2π ∫−∞
2
jω t0 2
[
]
• 使输出信噪比达到最大的传输函数H(ω)就是我们所要 求的最佳滤波器的传输函数。这是一个泛函求极值的 问题,采用施瓦兹(Schwartz)不等式可以容易地解决 该问题。
施瓦兹(Schwartz)不等式:
∫
∞
−∞
A(ω ) B(ω )dω ≤ ∫
2
∞
−∞
A(ω ) dω ∫ B(ω ) dω
N0 Gn (ω ) = 2
求匹配滤波器的传递函数,输出波形和输出最大信躁比
信号频谱:
S (ω ) = ∫ s (t )e
−∞
∞
− jωt
dt = a ∫ cos ω 0te
0
τ
− j ωt
dt
1− e 1− e = a[ − ] 2 j (ω − ω 0 ) 2 j (ω + ω 0 )
• 因: ω0τ = 2mπ ,上式变为:
白噪声和色噪声
• (实)白噪声的定义:均值为0,功率谱密度在范 围 -∞<ω<+∞ 内是正常数的平稳过程.
• 不是白噪声的噪声都是色噪声
白噪声的特点
1)实白噪声的功率谱密度P(ω)=N0/2,-∞<ω<+∞; 2)实白噪声的功率谱是均匀分布的; 3)实白噪声是一种平稳的随机过程;所谓平稳的随机过 程,是指它的统计特性不随时间的推移而发生变化; 4)实白噪声的任意两个不相同时刻的取样值互不相关: 5)实白噪声如果服从高斯正态分布,称为白高斯噪声,此 时任意两个不相同时刻的取样值相互独立. 6)实白噪声的自相关函数: N Rn (τ ) = 0 δ (τ )
[
]
A (ω ) = H (ω ) G n (ω ) e
B (ω ) =
将其代入前式:
jω t 0
S (ω ) G n (ω )
∫
∞
−∞
H(ω)S(ω)e dω ≤ ∫ H(ω) Gn (ω)dω • ∫
jωt0 2 −∞
2
∞
∞
S(ω)
2
−∞
Gn (ω)
dω
A(ω ) = cB ∗ (ω )
得:
1 d0 ≤ 2π
− jω t0
最佳滤波器的传递函数:
H ( ω ) = cS ( ω ) e
*
− jω t
0
具有与信号频谱的共轭形式,称为匹配滤波器。
在白噪声的干扰下,对于已知信号滤波,当t=t0时给出 最大的信噪比。
匹配滤波器冲激响应
∞ 1 jω t ω h (t ) = H e dω ( ) ∫ 2π − ∞ ∞ c jω ( t − t 0 ) ∗ ω = S ( ) e dω ∫ 2π − ∞
-
延迟线
e
− jωτ
例2 白噪声中射频矩形脉冲信号的匹配滤波器
设脉冲信号s(t) 为:
⎧ ⎪a cos ω0 t, s(t ) = ⎨ 0, ⎪ ⎩
0≤t ≤τ t < 0, t > τ
设时间τ内有多个振荡周期T0 , ω 0 τ = 2 πτ T = 2 m π , m >> 1(整数) 0 加性白噪声功率谱:
2
匹配滤波器性质和特点
(一)最大信噪比与信号波形无关 : 由于匹配滤波器的输出信噪比与输入信号波形 无关,只与信号的能量有关,因此也可以说,匹配滤波 器的检测能力与输入信号波形无关,只与能量有关; 或者说,在同样的白噪声干扰条件下,只要信号能量 相同,并实现匹配滤波,则任何信号形式都能给出相 同的检测能力.这个原理在雷达信号检测理论中称为 能量原理,它对实际有重要的指导意义.譬如在类似 的白噪声的宽带杂波干扰下,要想提高雷达的检测能 力,就只能依靠提高信号的能量,而利用信号波形的 设计是无法提高检测能力的.
(三)匹配滤波器对信号的幅度和时延具有适应性
s( t ) ⇔ S(ω)
s 1 ( t ) = as ( t − τ )
s1 ( t ) ⇔ S1 (ω)
− j ωτ
S 1 ( ω ) = aS ( ω ) e
H 1 ( ω ) = aS 1 ( ω ) e
*
− j ω t1
= caS
*
(ω ) e
− j (ω −ω 0 )τ
− j (ω +ω 0 )τ
1− e 1− e S (ω ) = a[ − ] 2 j (ω − ω 0 ) 2 j (ω + ω 0 )
− jωτ
− jωτ
其频谱为:
1 − e − jωτ 1 − e − jωτ S (ω ) = a[ − ] 2 j (ω − ω 0 ) 2 j (ω + ω 0 )
对信号的频移不具有适应性
S 2 (ω ) = S (ω + ω d )
H 2 (ω ) = S (ω + ω d ) e
* − jω t 0
H 2 (ω )与H (ω )是不同的
信号的初相角影响
对于实信号 如果假设初相角是随机的 ,由于初相 角无法匹配掉,输出的峰值功率也是随机 的。 初相角在(0,2π)上是均匀分布的统 计平均之后,将使信噪比损失3db.
− j ω ( t1 − τ )
= aH ( ω ) e
− j ω [ t 1 − ( t 0 + τ )]
如果取
t1 = t 0 + τ
H1 (ω ) = aH (ω )
这就证明S(t)和 S(t0)的匹配滤波器是相同的。 只要信号波形不变,不管什么时间出现,匹配 滤波器的脉冲响应是一样的,匹配滤波器的这一特 性称为时间上的适应性.
S H (ω ) = c G
∗
n
(ω ) e (ω )
− jω t0
相频特性:
arg
H ( ω ) = − arg
S (ω ) − ω t 0
− arg
S (ω )
与信号相频特性反相 与频率成线性关系
− ω t0
滤波器的相频特性与信号的相位谱互补(除常数相位和线性 相位之外)。 不管输入信号有怎样复杂的非线性相位谱,经过匹配滤波器 之后,这种非线性相位都被补偿掉了,而输出信号中只留下了线性 的相位谱。
H (ω ) = cS * (ω )e − jωt 0
匹配波器的传输函数为:
1− e 1− e ] H (ω ) = ca[ + 2 j (ω − ω0 ) 2 j (ω + ω0 )
− jωτ
− jωτ
⎧ ⎪a cos ω0 t , s( t ) = ⎨ 0, ⎪ ⎩
0≤t≤τ t < 0, t > τ
• 信号检测的目:
就是设计一种最优的处理器,最好地 从受扰观察获取目标的有关信息.
• 实践表明:
雷达接收机输出的信噪比越大,则 在观察示波器上越容易发现信号。
匹配滤波器: 在输入为已知信号加白噪声的条 件下,使得输出的信噪比最大的最佳 线性滤波器。
说明
• 信号波形已知; • 线性滤波; • 信躁比最大。
= cs ∗ ( t 0 − t )