PID流量控制
pid的工作原理和应用

PID的工作原理和应用1. 什么是PID控制器PID(Proportional-Integral-Derivative)控制器是一种常用的自动控制系统,它可以根据所控制对象的反馈信号,通过比例、积分、微分这三个操作,实现对输出量的调节,从而使得系统的输出达到预期目标。
2. PID控制器的工作原理PID控制器依靠三个主要参数来实现控制,这三个参数分别是比例(P)、积分(I)和微分(D)。
•比例(P)控制是根据当前误差的大小来调整输出量的大小,从而实现对系统的控制。
比例控制的基本公式为:P = Kp * e(t),其中P为输出量的大小,Kp为比例增益,e(t)为当前误差。
•积分(I)控制是用于消除系统的稳态误差,它通过积累误差的积分项来调整输出量。
积分控制的基本公式为:I = Ki * ∫e(t)dt,其中I为输出量的大小,Ki为积分增益,∫e(t)dt为误差的积分。
•微分(D)控制是用于预测系统未来的状态,从而减小系统的超调和振荡。
微分控制的基本公式为:D = Kd * d(e(t))/dt,其中D为输出量的大小,Kd为微分增益,d(e(t))/dt为误差的导数。
PID控制器的输出量可以通过将三个操作加和来计算,即输出量 = P + I + D。
3. PID控制器的应用PID控制器广泛应用于工控系统、自动化系统以及各种控制要求精度高、快速响应的系统中,例如温度控制、速度控制和位置控制等。
具体的应用领域如下:1.温度控制:PID控制器可以根据温度传感器反馈的信号,控制加热或降温设备的输出,以达到设定的温度值。
2.速度控制:PID控制器可以根据速度传感器反馈的信号,控制电机或驱动器的输出,以实现对车辆或机械设备的精确控制。
3.位置控制:PID控制器可以根据位置传感器反馈的信号,调整执行器的输出量,使得被控对象达到预定位置。
4.流量控制:PID控制器可以根据流量传感器反馈的信号,调整阀门或泵的输出量,以实现对流体流量的控制。
PID调节流量

PID调节流量,数字上不去∙悬赏分:20∙- 解决时间:2010-11-2 21:28现在我在做PID 调节流量,用300PLC,设定流量为120方/小时,昨天运行时我把调节阀开始的开度改为0,先启泵,后使用PID,把比例增益设为0.6,复位时间为1.0,发现开始后流量从0变到38后,一直在40左右徘徊,一直不上升,好长时间不变化,到不了120方/小时。
望各位大侠,告诉一二,不知是什么原因,急死了,如何才能让流量自己增加上去,需要做些什么?是调比例增益,还是调复位时间?还是别的,我的程序是按西门子例程做的,设了流量设定值、流量反馈值、手动值、比例增益值、复位时间值。
别的都是默认值。
问题ID: 60065提问者:露露- 资深学长第3级最佳答案在线监视一下PID的操作值,检查变频器设定,等等~~回答者:新手++ - 初级技术员第5级2010-10-28 13:54提问者对于答案的评价:谢谢,解决了,同时对所有参与回答师傅表示衷心的感谢您觉得最佳答案好不好?50% (0) 50% (0)其他回答是比例增益小了,需要增大比例增益。
转贴一份关于实验法的操作说明,供参考。
实验凑试法是通过闭环运行或模拟,观察系统的响应曲线,然后根据各参数对系统的影响,反复凑试参数,直至出现满意的响应,从而确定PID控制参数。
实验凑试法的整定步骤为"先比例,再积分,最后微分"。
(1)整定比例控制将比例控制作用由小变到大,观察各次响应,直至得到反应快、超调小的响应曲线。
(2)整定积分环节若在比例控制下稳态误差不能满足要求,需加入积分控制。
先将步骤(1)中选择的比例系数减小为原来的50~80%,再将积分时间置一个较大值,观测响应曲线。
然后减小积分时间,加大积分作用,并相应调整比例系数,反复试凑至得到较满意的响应,确定比例和积分的参数。
(3)整定微分环节若经过步骤(2),PI控制只能消除稳态误差,而动态过程不能令人满意,则应加入微分控制,构成PID控制。
PID流量控制
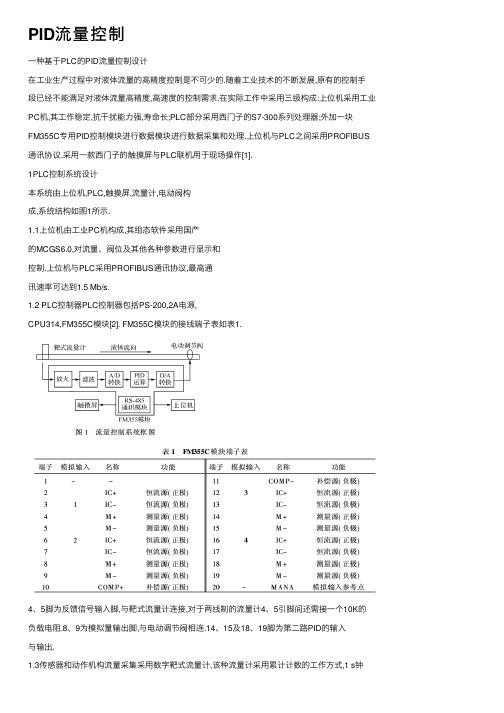
PID流量控制⼀种基于PLC的PID流量控制设计在⼯业⽣产过程中对液体流量的⾼精度控制是不可少的.随着⼯业技术的不断发展,原有的控制⼿段已经不能满⾜对液体流量⾼精度,⾼速度的控制需求.在实际⼯作中采⽤三级构成:上位机采⽤⼯业PC机,其⼯作稳定,抗⼲扰能⼒强,寿命长;PLC部分采⽤西门⼦的S7-300系列处理器;外加⼀块FM355C专⽤PID控制模块进⾏数据模块进⾏数据采集和处理.上位机与PLC之间采⽤PROFIBUS 通讯协议.采⽤⼀款西门⼦的触摸屏与PLC联机⽤于现场操作[1].1PLC控制系统设计本系统由上位机,PLC,触摸屏,流量计,电动阀构成,系统结构如图1所⽰.1.1上位机由⼯业PC机构成,其组态软件采⽤国产的MCGS6.0,对流量、阀位及其他各种参数进⾏显⽰和控制.上位机与PLC采⽤PROFIBUS通讯协议,最⾼通讯速率可达到1.5 Mb/s.1.2 PLC控制器PLC控制器包括PS-200,2A电源,CPU314,FM355C模块[2]. FM355C模块的接线端⼦表如表1.4、5脚为反馈信号输⼊脚,与靶式流量计连接,对于两线制的流量计4、5引脚间还需接⼀个10K的负载电阻.8、9为模拟量输出脚,与电动调节阀相连.14、15及18、19脚为第⼆路PID的输⼊与输出.1.3传感器和动作机构流量采集采⽤数字靶式流量计,该种流量计采⽤累计计数的⼯作⽅式,1 s钟累计1次,⼯作范围40~1 000 L/h,对⼤流量的采集较为精确.V型调节球阀利⽤球芯转动与阀座打开相割打开⾯积(V形窗⼝)来调节介质流量,调节性能、⾃洁性能好,适⽤于⾼粘度、悬浮液、纸浆告⽰不⼲净、含纤维介质场合.采⽤直连⽅式与执⾏机构连接,具有结构紧凑、尺⼨⼩、重量轻、阻⼒⼩、动作稳定可靠等优点.流量计和调节阀的信号范围为4~20 mA,与PLC连接.1.4触摸屏采⽤西门⼦的TD100触摸屏,与PLC通过PROFIBUS总线相连.使⽤PROTOOLS6.0编辑界⾯监控各种参数.当上位机出现故障时,触摸屏可替代上位机操作,提⾼了系统的可靠性.2PID算法当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其他技术难以采⽤时,系统控制器的结构和参数必须领先经验和现场调试来确定,这时应⽤PID控制技术最为⽅便,即利⽤⽐例、积分、微分计算出控制量进⾏控制[3].PID控制为3环节叠加,公式为:m(t) = Kpe(t)+Kpτde(t)dt+KiTi∫i0e(t)dt,其中Kp为⽐例系数,Kd为微分系数,τ为微分时间常数,Ki为积分系数.对于离散系统的PID公式为:P(k) = Kp{E(k)+TTi∑kj=0E(j)+TdT[E(k)-E(k-1)]}.3配置PID程序模块对西门⼦的PLC采⽤SIMA TIC STEP7 V5.3编程.进⼊STEP7的编程环境后⾸先通过“⼯程向导”配置硬件和⽹络参数,选⽤的电源模块为PS-200 2A ,中央处理器为CPU 314IFM,PID控制器为FM355 C型.完成配置后打开OB1主程序块(图2),调⽤FB31模块(STEP7中有LAD,STL ,FBD三种编程⽅式,STL为语句表编程⽅式,其他两种为图形调⽤⽅式).其中DB31为分配给FB31的背景块.FB31有如下⼏个参数必须设置:COM_RST参数地址DB31.DBX44. 0 BOOL型. FM355的启动开关.CHANNEL参数地址DB31.DBX2.0 BOOL型.控制端的通道号(每块FM355含两个通道).LMN_RE参数地址DB31.DBX52BOOL,参数类型为REAL型(32位浮点数).存储的是在未启动PID控制时的阀位值(即⼿动控制值),取值范围为0~100(系统将默认这些数值为电动阀的开度百分数),该参数在PID控制启动后不起作⽤.LMN_REON参数地址DB31.DBX6.4,参数类型BOOL型(在STEP7中为1位⼆进制数).当为1时PID控制关闭,LMN_RE的值作为输出值送给电动调节阀.当为0时,PID控制超作⽤,LMN_RE⽆效.PHASE参数地址DB31.DBD4,参数类型INT型(16位⽆符号整数).PID的相位控制,为1时控制相位反向180°.SP_RE参数地址DB31.DBD48,参数类型REAL型.PID 控制的设定值,取值范围为0~100(%).PID控制启动后模块通过计算该值与采集值的差值ER来改变输出值,仅当LMN_REON为0时有效.DEADB_W参数地址DB31.DBD104,参数类型REAL型.默认值为0,单位值为0,单位Hz.不⼯作区带宽设定值,差值ER将通过这个参数滤波.它关系到PID控制的性湖北⼤学学报(⾃然科学版)第28卷能.GAIN参数地址为DB31.DBD108,参数类型为REAL型.默认值为1.增益控制值,增益过⼤会提⾼系统的趋近速度,但同时会增⼤系统波动,导致系统不稳定.增益过⼩则会使系统的趋近速度变慢.TI参数地址为DB31.DBD112,参数类型REAL型.默认值为3000,单位s.积分时间常数.TI=0时,⽆积分环节.TD参数地址为DB31.DBD116,参数类型REAL型.默认值为0,单位s.微分时间常数.TD=0时,⽆微分环节.TM_LAG参数地址为DB31.DBD120,参数类型REAL型.默认值为5,单位s.微分时间延迟设置.LOAD_PAR参数地址为DB31.DBX44.3,参数类型为BOOL型.PID控制的启动开关,每次启动PID或改变PID参数后必须将此位置1,系统每次检查到此位为1,则将所有参数下载到FM355模块,然后将此位复位[4].4PID参数的调整⽅法PID参数的设置⼀⽅⾯是要根据控制对象的具体情况⽽定;另⼀⽅⾯是经验.Kp可控制幅值震荡,Kp⼤则会出现幅值震荡的幅度⼤,但震荡频率⼩,系统达到稳定时间长;Ki是解决动作响应的速度快慢的,Ki⼤了响应速度慢,反之则快;Kd是消除静态误差的,⼀般Kd设置都⽐较⼩,⽽且对系统影响⽐较⼩[5].5试验结论本系统在葛店的新武⼤有机硅⼚通过测试.测试中流体采⽤甲醇,测试范围为50~250 L/h.以设定值为200 L/h的系统阶跃响应曲线为例,系统延迟时间td=3.5 s,上升时间tΓ=5 s,峰值时间tp=7 s,调节时间ts=28.5 s,超调量公式为:δ%=h(tp)-h(∞)h(∞)×100%,在试验中h(tp)=290,h(∞)=200,所以δ%=45%.经过调试后,本系统被证明完全能胜任有机硅⽣产过程中,对甲醇流量的精确控制. 参考⽂献:[1]周军,海⼼.电⽓控制及PLC[M].北京:机械⼯业出版社,2001:90 135.[2]余雷声,⽅宗达.电器控制与PLC应⽤[M].北京:机械⼯业出版社,1999:126 152.[3]陶永华,尹怕欣,葛芦⽣.新型PID控制及其应⽤[M].北京:机械⼯业出版社,1998.[4] Kember G, Dubay R. PID gain scheduling using fuzzy logic[J]. JSA Transactions, 2000,39(3):317 325.[5] Liu G P, Daley S. Optimal-tuning nonlinear PID controllers for unstable processes based on gain and phase margin specifications: a fuzzy neural approach[J]. Fuzzy Sets and Systems, 2002: 128(1):95 106.The PID control system of flow measuring based on PLCXIAO Lei, XIE Ju-fang(School of Phisics and Electronic Technology, Hubei University, Wuhan 430062, China) Abstract:Described a kind of PID control system based on PIC. The system is composed of supervisor PC, PLC control block, the touch screen ,the flow measuring probe and the electrically operated valve. The system reads the flow measuring from the probe and then calculate the output value by using PID algorithm. The value output to the electrically operated valve to control the flow.The system also can be used in hard condition with high quality.Key words:flow measuring control system; PID; PLC; FM355C(责任编辑晏建章)。
pid流量控制课程设计

pid流量控制课程设计一、课程目标知识目标:1. 让学生理解PID控制的基本概念,掌握其原理和数学模型;2. 使学生掌握PID控制器参数调整的方法,并能运用到流量控制中;3. 让学生了解流量控制系统的特点,掌握相关传感器的工作原理。
技能目标:1. 培养学生运用数学知识解决实际工程问题的能力,能够进行简单的PID控制器设计和调试;2. 提高学生动手实践能力,能够搭建简单的流量控制系统并进行调试;3. 培养学生团队协作和沟通能力,能够就流量控制问题进行讨论和分析。
情感态度价值观目标:1. 激发学生对自动化技术的兴趣,培养其探索精神和创新意识;2. 培养学生严谨的科学态度,注重实验数据的真实性;3. 增强学生环保意识,使其认识到流量控制在节能减排方面的重要性。
课程性质:本课程为高二年级自动化控制相关课程,理论与实践相结合,注重培养学生的动手实践能力和解决实际问题的能力。
学生特点:高二学生在数学和物理方面具备一定的基础,具有较强的逻辑思维能力和好奇心,但可能对实际工程问题了解不足。
教学要求:结合学生特点,以理论为基础,实践为导向,注重培养学生的实际操作能力。
通过本课程的学习,使学生能够将所学知识应用于实际工程问题,提高其综合素质。
教学过程中,关注学生的个体差异,鼓励学生提问和讨论,提高课堂互动效果。
二、教学内容1. 理论部分:a. 流量控制基本概念及数学模型介绍;b. PID控制原理及其在流量控制中的应用;c. PID控制器参数调整方法及其对系统性能的影响;d. 流量控制系统中的传感器原理及选型。
2. 实践部分:a. 搭建简单的流量控制系统;b. PID控制器参数调整实践;c. 流量控制系统的调试与优化;d. 团队协作,分析流量控制问题并给出解决方案。
教材章节及内容:1. 《自动化控制原理》第四章:控制系统数学模型;2. 《自动化控制原理》第五章:PID控制器设计及参数调整;3. 《传感器与检测技术》第二章:流量传感器。
pid控制每秒流量采样时间设置
pid控制每秒流量采样时间设置
用指令向导做的控制每秒钟的流量恒定
流量是通过高速计数器换算过来的
请问smb34那个默认的中断是多久一次?
我采样时间设为多少比较合适
最佳答案
SMB34,时间间隔值从1~255ms。
如果对于21x 系列,时间间隔值从5~255ms。
高速计数器计算是每个扫描周期调用1次。
而对于PID 调节来说相当于每1s(默认值)采样1次。
对于你的流量计算来说,采样时间越短越好,这样瞬时流量越精确。
不过对于PID来说,如果你的流量每次变化不太大时,PID的默认值设置应该能满足要求。
通俗易懂的PID控制算法讲解

最优控制旨在寻找一种最优的控制策 略,使得系统性能达到最优。与PID 控制相比,最优控制具有更高的性能 指标和更好的全局优化能力。然而, 最优控制的实现需要精确的数学模型 和大量的计算资源,且对系统参数变 化较为敏感。
05
PID控制算法的应用实例
工业自动化领域的应用
要点一
温度控制
在工业生产过程中,PID控制算法被 广泛应用于温度控制系统中,如熔炼 炉、热处理炉等设备的温度控制。通 过实时采集温度数据,与设定值进行 比较,PID控制器能够自动调节加热 元件的功率,使温度稳定在设定值附 近。
该传递函数描述了PID控制器在频域中的特性,可用于分析系统的稳定性、动态性能和 稳态精度等。
通过调整Kp、Ki和Kd三个参数,可以实现对系统性能的优化。在实际应用中,常采用 试凑法、经验法或优化算法等方法来确定PID参数。
03
PID控制算法的参数整定
参数整定的意义
提高系统性能
通过调整PID控制器的参数,可以优化系统 的动态响应和稳态精度,从而提高系统的整 体性能。
适应不同应用场景
不同的被控对象和不同的应用场景需要不同的PID 参数配置,参数整定可以使PID控制器适应各种应 用场景。
保证系统稳定性
合理的参数配置可以保证系统的稳定性,避 免系统出现振荡或失控等不稳定现象。
参数整定的方法
试凑法
根据经验或实验数据,逐步调整 PID控制器的参数,观察系统的响 应情况,直到满足性能指标要求 。
PID控制算法由比例(P)、积分(I) 和微分(D)三个部分组成,每个部 分都有不同的作用,通过调整三个部 分的参数可以实现对系统的精确控制 。
PID控制算法的应用领域
01
02
03
pid控制在工业生产中的应用

PID控制(比例-积分-微分控制)在工业生产中有广泛的应用,它是一种经典的反馈控制方法,常被用于调节和控制温度、压力、流量、速度等工业过程中的变量。
以下是PID控制在工业生产中的一些应用:
1. 温度控制:在化工、食品加工、制药等行业,需要对反应釜、烘干设备、冷却系统等进行温度控制,PID控制可以实现精准的温度调节,确保生产过程稳定和产品质量。
2. 流量控制:在液体传输、气体调节、液位控制等过程中,需要对流量进行精确控制,PID控制可以根据实际情况调节阀门或泵的开度,使得流量稳定在设定值。
3. 压力控制:许多工业过程需要对压力进行控制,如供水系统、气压系统、气动传动系统等,PID控制可以确保系统压力稳定在设定范围内,提高设备运行效率和安全性。
4. 速度控制:在机械制造、输送系统、电机驱动等领域,需要对速度进行精确控制,PID控制可以根据反馈信号及时调整控制器输出,实现期望的速度调节。
总之,PID控制在工业生产中可以提高生产过程的稳定性、
可靠性和自动化程度,对于各种工业过程的控制都有着重要的应用。
随着计算机技术和人工智能的发展,PID控制也在不断进化,出现了智能PID控制器,它能够自动调整参数以适应变化的过程条件,从而进一步提高了系统的性能和可靠性。
pid控制应用场景
pid控制应用场景PID控制器是常用的控制器之一,应用范围广泛。
其应用场景主要包括以下方面:1.温度控制温度是许多生产和工程领域中的重要控制参数之一。
PID控制器可以根据温度信号反馈实时调整加热或冷却的输出,使温度保持恒定或按设定曲线变化。
例如,在化工生产中,需要严格控制反应器的温度,以确保反应物能够按预期的速率而反应,而过高或过低的温度都会影响反应的效果。
2.流量控制流量控制也是工业生产、实验设备等领域中的重要控制参数之一。
PID控制器可根据测量的流量信号反馈,及时调整阀门开度或泵的转速等输出,以控制流量。
例如,在化工生产中,需要将多种原料按照一定比例混合,需要精确地控制每种原料的流量,以保证混合物符合要求。
3.位置控制位置控制是机器人、机床、自动化生产线等领域中常见的控制应用场景。
PID控制器可根据位置信号反馈及时调整线性或旋转执行器的输出,使其到达预设的位置。
例如,汽车工厂中的机器人组装汽车时,需要将零部件精确地组装到指定位置,而PID控制器可以帮助机器人实现高精度的位置控制。
4.转速控制转速控制是电机、风机、泵等设备的重要应用。
PID控制器可根据测量的转速信号反馈,及时调整电机或风机等输出,以调整运行速度。
例如,在工业生产中,需要不同转速的电机来带动不同的设备,而PID控制器可以控制电机的转速,确保设备能够按照预期的速率运行。
5.压力控制除了以上列举的几种,PID控制器还广泛应用于化工、水处理、医疗设备、航空航天等许多行业和领域中。
随着科技的不断进步和应用的不断扩展,PID控制器也不断地适应新的应用场景和需求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种基于PLC的PID流量控制设计
在工业生产过程中对液体流量的高精度控制是不可少的.随着工业技术的不断发展,原有的控制手
段已经不能满足对液体流量高精度,高速度的控制需求.在实际工作中采用三级构成:上位机采用工业
PC机,其工作稳定,抗干扰能力强,寿命长;PLC部分采用西门子的S7-300系列处理器;外加一块
FM355C专用PID控制模块进行数据模块进行数据采集和处理.上位机与PLC之间采用PROFIBUS
通讯协议.采用一款西门子的触摸屏与PLC联机用于现场操作[1].
1PLC控制系统设计
本系统由上位机,PLC,触摸屏,流量计,电动阀构
成,系统结构如图1所示.
1.1上位机由工业PC机构成,其组态软件采用国产
的MCGS6.0,对流量、阀位及其他各种参数进行显示和
控制.上位机与PLC采用PROFIBUS通讯协议,最高通
讯速率可达到1.5 Mb/s.
1.2 PLC控制器PLC控制器包括PS-200,2A电源,
CPU314,FM355C模块[2]. FM355C模块的接线端子表如表1.
4、5脚为反馈信号输入脚,与靶式流量计连接,对于两线制的流量计4、5引脚间还需接一个10K的
负载电阻.8、9为模拟量输出脚,与电动调节阀相连.14、15及18、19脚为第二路PID的输入
与输出.
1.3传感器和动作机构流量采集采用数字靶式流量计,该种流量计采用累计计数的工作方式,1 s钟
累计1次,工作范围40~1 000 L/h,对大流量的采集较为精确.V型调节球阀利用球芯转动与阀座打开
相割打开面积(V形窗口)来调节介质流量,调节性能、自洁性能好,适用于高粘度、悬浮液、纸浆告示不
干净、含纤维介质场合.采用直连方式与执行机构连接,具有结构紧凑、尺寸小、重量轻、阻力小、动作稳
定可靠等优点.流量计和调节阀的信号范围为4~20 mA,与PLC连接.
1.4触摸屏采用西门子的TD100触摸屏,与PLC通过PROFIBUS总线相连.使用PROTOOLS6.0
编辑界面监控各种参数.当上位机出现故障时,触摸屏可替代上位机操作,提高了系统的可靠性.
2PID算法
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其他技术难以采
用时,系统控制器的结构和参数必须领先经验和现场调试来确定,这时应用PID控制技术最为方便,即
利用比例、积分、微分计算出控制量进行控制[3].PID控制为3环节叠加,公式为:m(t) = Kpe(t)+Kpτ
de(t)
dt+KiTi∫i0e(t)dt,其中Kp为比例系数,Kd为微分系数,τ为微分时间常数,Ki为积分系数.对于离散
系统的PID公式为:P(k) = Kp{E(k)+TTi∑kj=0E(j)+TdT[E(k)-E(k-1)]}.
3配置PID程序模块
对西门子的PLC采用SIMA TIC STEP7 V5.3编程.进入STEP7的编程环境后首先通过“工程向
导”配置硬件和网络参数,选用的电源模块为PS-200 2A ,中央处理器为CPU 314IFM,PID控制器为
FM355 C型.
完成配置后打开OB1主程序块(图2),调用
FB31模块(STEP7中有LAD,STL ,FBD三种编程
方式,STL为语句表编程方式,其他两种为图形调用
方式).其中DB31为分配给FB31的背景块.FB31
有如下几个参数必须设置:COM_RST参数地址
DB31.DBX44. 0 BOOL型. FM355的启动开关.
CHANNEL参数地址DB31.DBX2.0 BOOL型.控
制端的通道号(每块FM355含两个通道).LMN_RE
参数地址DB31.DBX52BOOL,参数类型为REAL
型(32位浮点数).存储的是在未启动PID控制时的
阀位值(即手动控制值),取值范围为0~100(系统将
默认这些数值为电动阀的开度百分数),该参数在
PID控制启动后不起作用.LMN_REON参数地址
DB31.DBX6.4,参数类型BOOL型(在STEP7中为
1位二进制数).当为1时PID控制关闭,LMN_RE
的值作为输出值送给电动调节阀.当为0时,PID控
制超作用,LMN_RE无效.PHASE参数地址DB31.DBD4,参数类型INT型(16位无符号整数).PID
的相位控制,为1时控制相位反向180°.SP_RE参数地址DB31.DBD48,参数类型REAL型.PID 控制
的设定值,取值范围为0~100(%).PID控制启动后模块通过计算该值与采集值的差值ER来改变输出
值,仅当LMN_REON为0时有效.DEADB_W参数地址DB31.DBD104,参数类型REAL型.
默认值为
0,单位值为0,单位Hz.不工作区带宽设定值,差值ER将通过这个参数滤波.它关系到PID控制的性
湖北大学学报(自然科学版)第28卷
能.GAIN参数地址为DB31.DBD108,参数类型为REAL型.默认值为1.增益控制值,增益过大会提高
系统的趋近速度,但同时会增大系统波动,导致系统不稳定.增益过小则会使系统的趋近速度变慢.TI
参数地址为DB31.DBD112,参数类型REAL型.默认值为3000,单位s.积分时间常数.TI=0时,无积
分环节.TD参数地址为DB31.DBD116,参数类型REAL型.默认值为0,单位s.微分时间常数.TD=0
时,无微分环节.
TM_LAG参数地址为DB31.DBD120,参数类型REAL型.默认值为5,单位s.微分时间延迟设置.LOAD_PAR参数地址为DB31.DBX44.3,参数类型为BOOL型.PID控制的启动开关,每次启动
PID或改变PID参数后必须将此位置1,系统每次检查到此位为1,则将所有参数下载到FM355模块,
然后将此位复位[4].
4PID参数的调整方法
PID参数的设置一方面是要根据控制对象的具体情况而定;另一方面是经验.Kp可控制幅值震荡,
Kp大则会出现幅值震荡的幅度大,但震荡频率小,系统达到稳定时间长;Ki是解决动作响应的速度快
慢的,Ki大了响应速度慢,反之则快;Kd是消除静态误差的,一般Kd设置都比较小,而且对系统影响比
较小[5].
5试验结论
本系统在葛店的新武大有机硅厂通过测试.测试中流体采用甲醇,测试范围为50~250 L/h.以设定
值为200 L/h的系统阶跃响应曲线为例,系统延迟时间td=3.5 s,上升时间tΓ=5 s,峰值时间tp=7 s,调
节时间ts=28.5 s,超调量公式为:δ%=h(tp)-h(∞)h(∞)×100%,在试验中h(tp)=290,h(∞)=200,所以δ%=45%.经过调试后,本系统被证明完全能胜任有机硅生产过程中,对甲醇流量的精确控制. 参考文献:
[1]周军,海心.电气控制及PLC[M].北京:机械工业出版社,2001:90 135.
[2]余雷声,方宗达.电器控制与PLC应用[M].北京:机械工业出版社,1999:126 152.
[3]陶永华,尹怕欣,葛芦生.新型PID控制及其应用[M].北京:机械工业出版社,1998.
[4] Kember G, Dubay R. PID gain scheduling using fuzzy logic[J]. JSA Transactions, 2000,39(3):317 325.
[5] Liu G P, Daley S. Optimal-tuning nonlinear PID controllers for unstable processes based on gain and phase margin
specifications: a fuzzy neural approach[J]. Fuzzy Sets and Systems, 2002: 128(1):95 106.
The PID control system of flow measuring based on PLC
XIAO Lei, XIE Ju-fang
(School of Phisics and Electronic Technology, Hubei University, Wuhan 430062, China) Abstract:Described a kind of PID control system based on PIC. The system is composed of supervisor PC, PLC control block, the touch screen ,the flow measuring probe and the electrically operated valve. The system reads the flow measuring from the probe and then calculate the output value by using PID algorithm. The value output to the electrically operated valve to control the flow.
The system also can be used in hard condition with high quality.
Key words:flow measuring control system; PID; PLC; FM355C
(责任编辑晏建章)。