自适应修正Smith算法在时滞系统中的应用
EHA半主动悬架自适应Smith预估时变时滞补偿控制

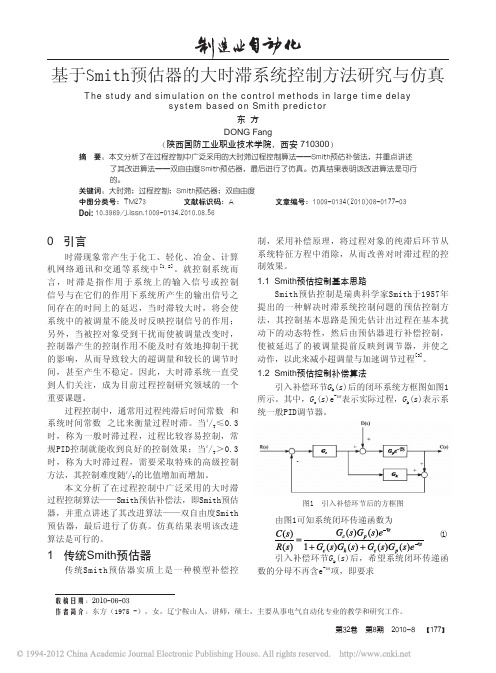
递到液压泵,使得液压缸进、出油口的压力差作用 于活塞而产生阻尼力,实现半主动控制。
()*
3415 +,0
12 ./* +,-
$%&' !# !"
图 1 EHA半主动悬架结构 Fig.1 StructureofsemiactivesuspensionwithEHA
1.2 含时滞 1/4车辆 2自由度悬架动力学模型 根据图 1所示的 EHA半主动悬架结构,建立
第 38卷 第 6期 2018年 11月
西安科技大学学报 JOURNALOFXI’ANUNIVERSITYOFSCIENCEANDTECHNOLOGY
DOI:10.13800/j.cnki.xakjdxxb.2018.0618 文章编号:1672-9315(2018)06-1005-08
EHA半主动悬架自适应 Smith 预估时变时滞补偿控制
文献[12-17]基于 Smith预估补偿控制策略 设计了半 主 动 悬 架 的 时 滞 补 偿 控 制 器,验 证 了 控 制器的有效性,但都是基于临界时滞时间的补偿; 实际悬架系统的时滞时间与临界时滞并不相同, 且不可知,因此传统 Smith预估补偿控制策略基于 临界时滞的补偿方式不能达到较好的时滞补偿效 果,即不能实现对时变时滞的补偿控制。
1 含时滞 EHA半主动悬架动力学模型
1.1 EHA半主动悬架工作原理 EHA半主动悬架结构如图 1所示。该半主动
悬架 主 要 由 EHA作 动 器 和 螺 旋 弹 簧 构 成,其 中 EHA作动器由无刷直流电机、液压泵、液压缸等构 成。控制器根据反馈回来的信号计算出悬架此时 所需的阻 尼 力,再 通 过 改 变 电 机 回 路 的 外 接 电 阻 阻值,进而改变电机的电磁转矩,并通过联轴器传
Simulink的时滞过程Smith预估控制与IMC研究方法研究 精品

基于Simulink的时滞过程Smith 预估控制与IMC控制方法研究Smith预估控制一、基本原理PID控制器因算法简单、鲁棒性好、可靠性高,一直是工业生产过程中应用最广的控制器。
然而实际生产过程往往具有非线性、时变不确定性,应用常规PID控制不能达到理想的控制效果。
这时往往不得不采用模型预测控制、自适应控制等先进控制策略来获得更好的控制性能。
近年来越来越多的研究人员就上层采用模型预测控制这类先进的控制算法,而底层保留传统的PID控制算法,即所谓的预测PID 控制算法,展开了一系列的研究。
1、纯滞后产生的主要原因:1)物料及能量在管道或者容器中传输及运送需要时间;2)物质反应、能量的释放及能量交换需要一定过程和时间;3)设备和设备之间的串联需要许多的中间环节;4)测量装置的响应时间;5)执行机构的动作时间;在控制对象调节通道、测量装置及执行机构等环节存在纯滞后时,控制系统闭环特征方程中就存在纯滞后因子,而且存在纯滞后的环节较多时,系统滞后时间也将随之增加。
因此明显降低了系统的稳定性,而且纯滞后时间越长,系统稳定性就越差。
由于纯滞后的存在,调节作用不及时,导致被调节系统的动态品质下降。
纯滞后越大,则系统的动态品质越差。
2、史密斯预估器原理在单回路控制系统中,控制器的传递函数为GC(s),被控对象传递函数为G O(s)e-ts,被控对象中不包含纯滞后部分的传递函数为G O(s),被控对象纯滞后部分的传递函数为e-ts。
则系统的闭环传递函数为Φ(S)=[GC(S)GO(S)e-τs]/[1+GC(S)GO(S)] (1)由式(1)可以看出,系统特征方程中含有纯滞后环节,它会降低系统的稳定性。
史密斯补偿的原理是:与控制器Gc(s)并接一个补偿环节,用来补偿被控对象中的纯滞后部分,这个补偿环节传递函数为Gm(s)=G o(s)(1-e-ts),t为纯滞后时间,补偿后的系统如图1所示。
图1 史密斯补偿后的控制系统从图中可以看出,若无系统延时时,系统等同于简单的预测PID 控制回路;而当系统有延时时,延时对系统的影响即可由Smith预估控制器消除,而预测PID参数则仅需根据无延时模型来整定,这样就可以避免延时带来的参数整定误差。
基于改进Smith预估器的二阶时滞系统

收稿日期:2009-09-08 修回日期:2009-12-15第28卷 第1期计 算 机 仿 真2011年1月文章编号:1006-9348(2011)01-0198-03基于改进S m it h 预估器的二阶时滞系统安连祥,马华民,刘永刚,刘新艳(河北工业大学电气与自动化学院,天津300130)摘要:在关于工业过程控制的研究中,针对常规Sm it h 预估器是基于时滞对象精确数学模型,而在实际应用中,当被控系统的参数不稳定或受到扰动时,就会造成Sm it h 预估模型的失控,使得控制效果变差甚至振荡。
尽管模糊Sm ith 预估控制对系统参数的变化不敏感,但并没有从本质上克服预估模型失控给系统带来的不稳定性影响。
为解决时滞引起失控的问题,提出了一种改进的模糊Sm ith 预估控制方法,并对方法进行了仿真。
仿真结果表明,能够增强系统的稳定性、鲁棒性,并且具有较好的控制精度,为实际工程设计提供了参考。
关键词:模糊控制;史密斯预估器;二阶时滞系统中图分类号:TP273 文献标识码:BA 2thOrder T i m e Delay Syste m Based onI mproved Fuzzy S m ith PredictorAN L ian-x iang ,MA H ua-m in ,L I U Y ong-gang ,L I U X in-yan(E lectr i ca l and A uto m ation Schoo,l H ebe iU n i ve rsity o f T echno l ogy ,T i anji n 300130,Chi na)ABSTRACT :A s traditi onal S m it h predictor is based on precise ti m e de lay sy stem mode,l when syste m pa rame ters are unstable or dist urbed ,t he S m it h pred i c t o r m ode l and sy stem m odel w ill not m atch ,this w ill l ead to bad contro l effect or even m ake syste m oscillatory .A lthough f uzzy contro l i s no t sensiti ve to t he var i e ty of syste m para m eters ,it dose not ove rco m es the bad i n fluence i n essence .T h i s paper ana l y zed the three fac t o rs lead i ng t o model m i s m atch ,and i ntroduced an i m proved Fuzzy S m ith controller .The results o f si m u lati on s how t hat t h ism ethod m akes syste m re m arkably stab le and robust ,has w ell contro l prec i sion ,and prov i des reference f o r practica l eng i neeri ng app licati on .KEY W ORDS :Fuzzy contro ;l S m ith pred ictor ;2th order ti m e delay syste m1 引言典型的工业过程大多可以等效或简化为带滞后环节的一阶或者二阶系统,而时滞环节的存在将对控制系统的性能将产生不利影响,特别是滞后时间较大时[1]。
基于Smith预估器的大时滞系统控制方法研究与仿真
传统Smith预估器实质上是一种模型补偿控
制,采用补偿原理,将过程对象的纯滞后环节从 系统特征方程中消除,从而改善对时滞过程的控 制效果。 1.1 Smith预估控制基本思路
Smith预估控制是瑞典科学家Smith于1957年 提出的一种解决时滞系统控制问题的预估控制方 法,其控制基本思路是预先估计出过程在基本扰 动下的动态特性,然后由预估器进行补偿控制, 使被延迟了的被调量提前反映到调节器,并使之 动作,以此来减小超调量与加速调节过程[3]。 1.2 Smith预估控制补偿算法
Doi: 10.3969/j.issn.1009-0134.2010.08.56
0 引言
时滞现象常产生于化工、轻化、冶金、计算 机网络通讯和交通等系统中[1,2]。就控制系统而 言,时滞是指作用于系统上的输入信号或控制 信号与在它们的作用下系统所产生的输出信号之 间存在的时间上的延迟,当时滞较大时,将会使 系统中的被调量不能及时反映控制信号的作用; 另外,当被控对象受到干扰而使被调量改变时, 控制器产生的控制作用不能及时有效地抑制干扰 的影响,从而导致较大的超调量和较长的调节时 间,甚至产生不稳定。因此,大时滞系统一直受 到人们关注,成为目前过程控制研究领域的一个 重要课题。
基于Smith预估器的大时滞系统控制方法研究与仿真
The study and simulation on the control methods in large time delay system based on Smith predict国防工业职业技术学院,西安 710300)
采用双控制器方案,构成双自由度Smith预估
图3 双自由度Smith预估器结构示意图 【178】 第32卷 第8期 2010-8
一种改进的自适应Smith预估器

Y* ( s) =
Y(s) +
Gc( s) Gm ( s) [ 1-
e-
S m
s
]
E
(
s
)
=
Gc ( s) [ Gm ( s) + Gp ( s) e- Ss - Gm( s) e- ] Sm s E( s)
( 2)
由( 2) 式可知, 模型误差越大, 即 Gp ( s) 与 Gm( s) 以及 S与 Sm 相差越大, 则补偿效果就越差。 由于 纯 滞 后 为 指 数 函 数, 故 纯 滞 后 的 误 差 比
控制器。当模型完全匹配时, 即 Go ( s) = Gm ( s) ,
S= Sm 时, 可得到系统的闭环传递函数为
- Ss
Y( s) = R( s)
1+
Gc( s) Gp( s) e
- Ss
G c( s) [ Gm( s) + Gp( s) e -
Gm ( s)
-
e
Sm
s
]
=
Gc ( s) Gp ( s) e- Ss 1 + Gc( s) Gm( s)
间的相关性, 从而得到一个以 Sm 为自变量的自相
关函数。但是, 由于自相关函数的运算量太大, 这 里本文假定在理想条件下 y ( t) 和 ym ( t ) 为具有相 同信号源的白噪声测量信号, 采用平均幅度差函 数( A M DF ) [ 8] 来代替自相关函数, 其具体形式如
第3期
王华强, 等: 一种改进的自适应 Smit h 预估器
317
对控制品质的不利影响。Smit h 预估器的具体结 构如图 1 所示。
图 1 Smit h 预估器的结构
Smith自抗扰控制器在过程时滞系统中的应用

S t mi h自抗 扰 控 制器 在 过 程 时滞 系统 中 的应 用
刘 川来 , 祥妹 , 艳 东 刘 赵
( 岛科 技 大 学 自动 化 与 电子 工 程 学 院 , 青 山东 青 岛 2 6 4 ) 6 0 2
摘 要 : 究 了一类 具有 时滞环 节的非 线 性 系统 的控 制 问题 , 用将 S t 研 利 mi h预估 器与 自
第3卷 第 6 2 期
青 岛 科 技 大 学 学 报( 自然 科 学 版 )
Vo. 2No 6 13 .
De . 0 1 c2 1
21 0 1年 1 2月 J u n lo n d o Un v ri fS in ea d Teh oo y Nau a ce c iin o r a fQig a iest o ce c n c n lg ( t rlS in eEdt ) y o 文 章 编 号 : 6 26 8 ( 0 1 0 — 6 10 1 7 —9 7 2 1 ) 60 4 — 4
t r a c ee t n c n r l r ( u b n e rjc i o to l o e ADRC) Th mih p e it r i u e o ei n t h . e S t r dco S s d t l mia e t e
e f c s o a . Th e h d o fe t fl g e m t o fADRC wh c o sd r t e u — d l d d n m is a d t e i h c n i e h n mo ee y a c n h u k o i t r a c s t t ld s u b n e o h y t m ,s u e o e t a e a d c m— n n wn d s u b n e a o a it r a c f t e s s e i s d t s i t n o m p n a e t t l it r a c ft e s s e .B sn h sm e h d,t e s s e i o u t — e s t o a s u b n e o h y t m d y u i gt i to h y t m s r b s ,a
自适应修正Smith算法控制大时滞过程的仿真研究

叶 分类号: P 7 . 】 T 232
文献际识码 : 文章编号 :0 3 2 1 0 81 0 1 0 B 10 74 ( 0 )0 02—4 2
Sef a t eCo rcigSmi e i o r nrl f ag lAd pi - r t t Prdc ro t re — v e n h t f Co o o L
tme Dea o e s i ly Pr c s
LI Gu - i n , U ixa g CHEN u ZHU f n , E J, Xu-e g XI Yu ( o t hn iesyo T c n lg l g f tma o ce c n n ieig, a g h u5 0 4 hn ) S uhC ia v ri f eh oo y Col eo Auo t nS in ea dE gn r Un t e i n Gu n z 工业控制 中, 由于工质 或材料 的传输 、信号 的传 递, 以及 元件老化 、零 点漂移等原 因。使得许多对 象在 不同程度上存在纯滞后 、参数 时变等复杂特性 。大滞后
对象 是工业生产过程 中很难控制 的一类 对象 , 它是 “ 具 有 滞后的过程 , 在输入 作用下不能立 刻观察 出它对 输 出
收 稿 日期 : 0 —0 —0 2 8 0 4 8
} 空韦U 论 与 应 用 理
《 动 技术 应 》 08 第2卷 0 自 化 与 用 20年 第1期 7
但在 实际应用时 由于参 数较多 , 增加 了参数整 定的难度 。 其实 , 上述校正 算法 可 以进行简化 。因此 , 文建议一种 本 简化 的改进的 自适 应 S t mih预估补偿算法 , 即采用常数 O值进 行 自适应修正 , t 使修正更 加简单易行 , 并且也能达
时滞对象的自适应Smith预估控制方案

时滞对象的自适应Smith预估控制方案韩如成李霄峰太原重型机械学院自动化系(太原030024)TP273.2摘要针对时滞被控对象提出了一种自适应Smith预估控制方案,利用变遗忘因子递推最小二乘法进行参数在线辨识以构成Smith预估器,采用模糊神经网络控制器完成对被控对象的控制。
仿真结果证明了这种方法的有效性。
主题词时滞系统自适应Sm ith预估器模糊神经网络Sel-f adaptive Smith Pre-estimation Control Scheme for Time-delay SystemH an Rucheng Li XiaofengT he Department of Automation,T aiyuan Heavy Machinery Institute(Taiyuan030024) Abstract The paper presents a sel-f adaptive sm ith pre-estimation control scheme for time-delay system. Smith predictor makes up of identificable param eter using RVFF(Recursive Variable Forgetting Factor M ethod) on line.FNNC(Fuzzy Neural Netw ork Controller)is used as system controller.The simulation results show that the method is effective w hen parameter is chang ed.Key words time-delay system sel-f adaptive smith predictor FNNC1引言大时滞被控对象的控制问题,在常规PID控制器控制效果不理想的情况下,引起人们广泛的研究,其中Smith预估补偿控制是应用较多的方法之一,但该方法要求预估模型必须准确,否则会引起系统的不稳定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
长期 以来 , 人们针对如 何提 高大时 滞 系统 的控 制 精度做 了许 多尝试 , 中控制专 家 S i 其 m t 15 h于 9 7年 提
出的 S i mt h预估 补偿 控制 方法 , 理论 上有 效地 证 明 从 了预估策 略在大时滞控 制系统 中 的必 要性 , 而成 功 从 地解决 了时滞系统 的控制问题 。然而 ,mt S h预估 算法 i 严重地依赖于精确的系统模型。如果 无法 准确地对 系 统 的滞后 时间及动态参 数进行 辨识 , 预估器 的结果 就 会偏离对象 的输 出 , 从而导致 闭环 系统不 稳定 。在 工 业现场 , 很多情况下很难获取 被控对 象的精 确模 型 , 因 此S t i m h预估算法在实 际工程应 用 中具有 一定 的局限
国家 “ 九七 三” 项
目) 的被控对 象 中存在 许多滞 后 过程 , 了有效 地解 为 决时滞对象 的控制 问题 , 将改 进 的 S t 预估 算法 应 i mh 用于磁体模拟器 , 构成大时滞温控系统 , 以验证 系统 的 鲁棒性和控制精度 。
性。
系统采用西 门子 s 4 0 7— 0 H双冗余 P C作为控制 L
器, 引入积分分离 PD算法 和改进 的 S t I i m h预估器 , 对 大时滞对象进行温度控制 。系统结构如图 1 所示 。
P C控制 器 L 大 时滞 磁体 模拟 对象
S t预 估模 块 mi h
O 引言
在工业生产过程 中 , 由于物 料或者 能量 的传输 延 迟, 系统滞后是一种普遍的现象 。时滞 的存 在 , 使得被
控变量无法及时地反 映对象所 承受 的扰动 , 样容 易 这 引起 系统超调或震荡 , 不利于闭环系统的稳定性 。
S t 预估 补偿模 型 , i mh 减小 了预估算法对 于数学模型 的 依赖性 , 并成功地应用于大时滞 温控系统。
维普资讯
自适应修正 S i mt h算法在时滞 系统中的应用 张
毅, 等
自适 应 修 正 S i m t 法 在 时 滞 系统 中的应 用 h算
Ap l a in o efa a t e M o ie pi t fS l d p i c o — v df d Sm i g r h i i e Dea y t i t Alo i m n Tm ly S sem h t
s se -a mo i e mi rditri sg e . I k sdy a cc re to ot ep d cieo tu c odngt ehso ia f c -tu e y tm df d S t p i h e co sdein d t ma e n mi o rcint r i t up ta c r i ot itrc le e t h st h e v h s h p dcig a c a y i n a e . Afe p lig i i e eaur o to y tm t ag i ly-a c ae p dcieo tu d e c l e r it c u c se h nc d n r tra pyn t n atmp rt e c nr lsse wi lr etmedea h c u t r it up ta x e— r e v n
制 品质 。算法 实现 简单 、 用灵 活 、 应性强 , 以应用 于其 他有滞 后影 响的场 合 。 应 适 可 关 键词 :自适 应 时滞 S i 预估 mt h 温控
中图分 类号 : P 0 . T 3 16 文献 标志码 :A
Abta t rdt n l mi rdciec mp nainc nrl eursmoea crt mo es f eo jcs oeh n erb s es f ecnrl sr c :Ta io a t pe it o e st o t q i r cuae d lo bet.T n a c o ut s o t i S h v o or e t h n ot h o
ln o to ai r c iv d. T e mo i e rdit e ag rtm se s d fe il o raie。a d i C e a p id i te n usra e tc nr lq ly ae a he e u t h df d p e ci lo h i a y a xbe t l z i v i n l e n t a b p le n o rid ti n h l p o e s sw t i - ly d c aa trsis rc se h tmedea e h rce t . i i c Ke ywo d r s: S l a a t e Ti ea S t rd cin Te e au e c nr l ef d p v - i med ly mi pe it h o mp rtr o to
栏 饧 煜 考
( 海交通 大学 自动化 系, 海 上 上 203 ) 000
摘
要 :传统 的 S i mt h预估 补偿控 制要求 较 高 的对 象模 型精 度 , 了提高 系统 的鲁 棒 性 , 出 了一 种改 进 的 S i 预 估器 。该 算法 根 为 提 mt h
据 历史 预估结 果动 态地对 预估 输 出进 行修 正 , 而提 高预 估精度 。将 其 应用 于大 时滞 温 控 系统 , 得 了 准确 的 预估 输 出 和 良好 的控 从 取