《3S集成技术》实验报告(王磊)
3S技术实习报告
一、实习的任务和要求。
实习任务:实习是实践的重要组成部分,能都让我们将课堂上的理论与实际相联系,用课堂所学习的东西来分析和解决生活中的实际问题,还可以提高我们的综合实践能力,提高理论与实践相结合的实践能力,掌握对图像的几何校正,用GPS的定位并采集数据,进行监督分类,专题图的建立等。
通过这些初步技能的实践,让我们更好的理解课程,培养了我们的能力。
实习的要求:通过实习,我们可以熟悉3S技术的主要支撑设备及设备的使用,可以用3S技术解决实际的林业问题,能够做好最后的实习报告,为后续相关知识的学习打好基础。
二、实习的时间和地点。
三、实习的主要内容和简要步骤。
(1)、遥感图像的几何校正。
A、显示图像文件:打开两个视窗,平铺视窗,Viewer1打开被校正图,Viewer2打开作为参考的已校正图。
B、启动几何校正模块:单击Viewer1菜单条下的Raster→Geometric Correction→Set Geometric Mode→Polynomial然后设置相应参数按确定。
C、对所需图像进行校正:在两视窗内采相应点对图像进行校正,所采点应尽量广布。
D、采集检验点检验精度:在已经采集的10点基础上采集二十个点验证校正的精度和实用性。
E、对图像进行重采样:在精度符合要求且图像具有实用性的前提下对图像进行重采样,生成重采样文件:resample.img。
(2)、地物类型点数据采集。
A、根据具体的要求对GPS进行必要的设置。
B、根据国土资源局土地类型的划分,分出周边环境所属类型。
C、利用GPS,在学校周边选择数据点,对不同土地利用类型的土地进行数据采集并列成表。
(3)、遥感图像分类---监督分类。
○1定义分类模板。
A、在视窗中显示之前的几何校正图像:resample.img。
B、在ERDAS界面中选择Classifier→Classification菜单→Signature Editor菜单栏→Signature Editor对话框,对需要设置的相应属性进行设置。
3S技术实习报告
课程实验报告学年学期课程名称3S技术与集成实验名称实习一软件的认识实验室测量测绘实验教学中心专业年级学生姓名学生学号提交时间成绩任课教师水利与建筑工程学院实习一软件的认识●了解ERDAS IMAGINE9.3的启动与关闭方法●熟悉ERDAS IMAGINE 9.3界面●了解ERDAS IMAGINE 9.3软件模块构成、功能实习内容:1. ERDAS IMAGINE9.3的启动方法:方法一:单击Windows任务栏的“开始”按钮,然后指向“程序”文件夹,再单击ERDAS IMAGINE9.2程序的图标即可;方法二:如果桌面上创建了ERDAS IMAGINE9.2的快捷方式图标,双击快捷图标即可,启动ERDAS IMAGINE9.2。
2. ERDAS IMAGINE9.2的关闭方法:方法一:单击ERDAS IMAGINE9.2窗口右上角控制按钮的“×”符号;方法二:单击Session(综合菜单)中的Exit IMAGINE命令;方法三:单击ERDAS IMAGINE9.2窗口左上角的图标,或右键单击控制按钮以左的区域打开控制菜单,选择“关闭”命令。
3. ERDAS IMAGINE9.2的界面介绍:启动ERDAS IMAGINE9.2以后,首先看到的是ERDAS IMAGINE9.2的图标面板(ICON PANEL),包括菜单条(Menu Bar)和工具条(Tool Bar)两部分,其中提供了启动ERDAS IMAGINE9.2软件模块的全部菜单和图标。
菜单条共有五项:(1)Session(综合菜单);(2)Main(主菜单);(3)Tools(工具菜单);(4)Utilities(实用菜单);(5)Help(帮助菜单),图1-1 ERDAS IMAGINE 9.2 图标面板图标面板工具条共有十一项:(1)Viewer;(2)Import;(3)Dataprep;(4)Composer;(5)Interpreter;(6)Catalog;(7)Classifier;(8)Modeler;(9)Vector;(10)Radar;(11)Virtual GIS;(12)Stereo;(13)AutoSync;(14)Subpixel;(15)DeltaCue表1-1 菜单条功能简介菜单命令菜单功能Session(综合菜单) 完成系统设置、面板布局、日志管理,启动命令工具、批处理过程、实用功能、联机帮助等Main(主菜单) 启动ERDAS IMAGINE9.2图标面板中包括的所有功能模块完成文本编辑,矢量及栅格数据属性编辑,图形图像文件坐标变换,注记及字体管理,三维Tools(工具菜单)动画制作Utilities(实用菜单) 完成多种栅格数据格式的设置与转换,图像的比较Help(帮助菜单) 启动关于图标面板的联机帮助,ERDAS IMAGINE9.2联机文档查看、动态连接库浏表1-2 Session(综合菜单)命令及其功能命令功能Preference 面向单个或全体用户,设置多数功能模块的系统缺省值Configuration 为ERDAS IMAGINE9.2配置各种外围设备,如打印机、磁带机Session Log 查看ERDAS IMAGINE9.2提示、命令及运行过程中的实时记录Active Process List 查看与取消ERDAS IMAGINE9.2系统当前正在运行的处理操作Commands 启动命令工具,进入命令菜单状态,通过命令执行处理操作Enter Log Message 向系统综合日志(Session Log)输入文本信息Start Batch Commands 启动或退出批处理工具,打开批处理向导,记录批处理命令Open Batch File 打开批处理命令文件View Batch Queue 打开批处理进程对话框,查看、编辑、删除批处理队列Flip Icon 确定图标面板(Icon Panel)的水平或垂直显示状态Tile Viewers 平铺排列两个以上已经打开的视窗(Viewer)Close All viewers 关闭当前打开的所有视窗(Viewer)Main 进入主菜单(Main),启动图标面板中包括的所有模块Tools 进入工具菜单(Tools),显示和编辑文本及图像文件Utilities 进入实用菜单(Utilities)执行ERDAS IMAGINE 9.2的常用功能Help 打开ERDAS IMAGINE 9.2联机帮助(On-line-help)文档Properties 打开ERDAS IMAGINE9.2系统特性对话框,查看和配置序列号与模块Exit IMAGINE 退出ERDAS IMAGINE 9.2软件环境表1-3 Main(主菜单)命令及其功能命令功能Start IMAGINE Viewer 启动ERDAS IMAGINE 9.2视窗(Viewer)Import/Export 启动ERDAS IMAGINE 9.2数据输入输出模块Data Preparation 启动ERDAS IMAGINE 9.2数据预处理模块Map Composer ERDAS IMAGINE 9.2专题制图模块Image Interpreter 启动ERDAS IMAGINE 9.2图像解译模块Image Catalog 启动ERDAS IMAGINE 9.2 图像库管理模块Image Classification 启动ERDAS IMAGINE 9.2图像分类模块Spatial Modeler 启动ERDAS IMAGINE 9.2空间建模工具Vector 启动ERDAS IMAGINE 9.2矢量功能模块Radar 启动ERDAS IMAGINE 9.2雷达图像处理模块表1-4 Tools(工具)菜单命令及其功能命令功能Edit Text Files 编辑ASCII 码文本文件Edit Raster Attributes 编辑栅格文件属性数据View Binary Data 查看二进制文件的内容View HFA File Structure 查看ERDAS IMAGINE 9.2层次文件结构Annotation Information 查看注记文件信息,包括元素数量与投影参数Image Information 获取ERDAS IMAGINE 9.2栅格图像文件的所有信息Vector Information 获取ERDAS IMAGINE 9.2矢量图形文件的所有信息Image Commands Tool 打开图像命令对话框,进入ERDAS IMAGINE 9.2命令操作环境Coordinate Calculator 将坐标系统从一种椭球体或参数转变为另外一种Create/Display Movie Sequences 产生和显示一系列图像画面组成的动画Create/Display Viewer Sequences 产生和显示一系列视窗画面组成的动画Image Drape 以DEM 为基础的三维图像显示与操作表1-5 Utilities(实用)菜单命令及其功能命令功能JPEG Compress Image 应用JPEG 压缩技术对栅格图像进行压缩,以便保存Decompress JPEG Image 将应用JPEG 压缩技术所生成的栅格图像进行解压缩Convert Pixels to ASCII 将栅格图像文件数据转换成ASCII 码文件Convert ASCII to Pixels 以ASCII 码文件为基础产生栅格图像文件Convert Images to Annotation 将栅格图像文件转换成ERDAS IMAGINE 9.2的多边形注记数据Convert Annotation to Raster 将ERDAS IMAGINE 9.2的多边形注记数据转换成栅格图像文件Create/Update Image Chips 产生或更新栅格图像分块尺寸,以便于显示管理Create Font Tables 以特定的字体生成一幅专题地图Compare Images 打开图像比较对话框,比较两幅图像之间的某种属性Reconfigure Raster Formats 重新配置系统中的栅格图像数据格式Reconfigure Vector Formats 重新配置系统中的矢量图形数据格式表1-6 Help(帮助)菜单命令及其功能命令功能Help for ICON Panel 显示ERDAS IMAGINE 9.2图标面板的联机帮助IMAGINE Online Documentation 进入联机帮助目录,查看ERDAS IMAGINE 9.2 联机文档IMAGINE Version 查看正在运行的ERDAS IMAGINE 9.2软件版本IMAGINE DLL Information 查看ERDAS IMAGINE 9.2动态连接库的类型与常数信息表1-7 图标面板功能简介图标功能简介该模块主要实现图形图像的显示,是人机对话的关键数据输入输出模块,主要实现外部数据的导入、外部数据与ERDAS支持数据的转换及ERDAS内部数据的导出数据预处理模块,主要实现图像拼接、校正、投影变换、分幅裁剪、重采样等功能专题制图模块,主要实现专题地图的制作启动图像解译模块,主要实现图像增强、傅立叶变换、地形分析及地理信息系统分析等功能图像库管理模块,实现入库图像的统一管理,可方便的进行图像的存档与恢复。
3S实验报告
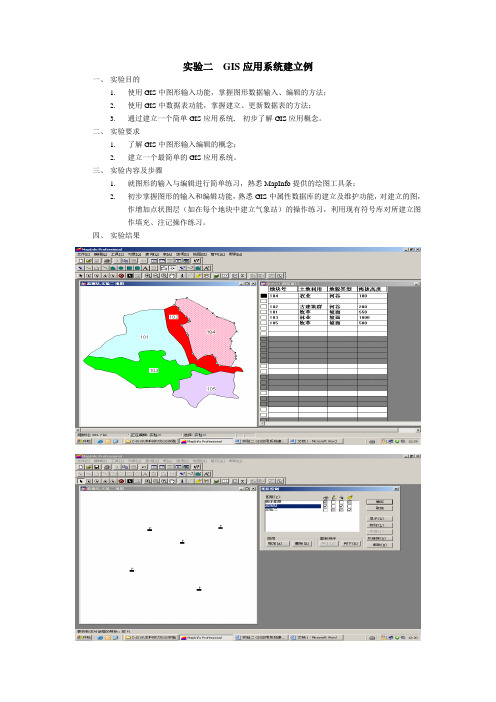
实验二GIS应用系统建立例一、实验目的1.使用GIS中图形输入功能,掌握图形数据输入、编辑的方法;2.使用GIS中数据表功能,掌握建立、更新数据表的方法;3.通过建立一个简单GIS应用系统, 初步了解GIS应用概念。
二、实验要求1.了解GIS中图形输入编辑的概念;2.建立一个最简单的GIS应用系统。
三、实验内容及步骤1.就图形的输入与编辑进行简单练习,熟悉MapInfo提供的绘图工具条;2.初步掌握图形的输入和编辑功能,熟悉GIS中属性数据库的建立及维护功能,对建立的图,作增加点状图层(如在每个地块中建立气象站)的操作练习,利用现有符号库对所建立图作填充、注记操作练习。
四、实验结果五、结果分析1.开始画图的时候,每个区域的衔接操作不熟练,后面逐渐掌握技巧,运用节点移动工具和增加节点工具,使得区域的衔接步骤得以实现。
特别指出,按S键后的节点捕捉工具特别好用,大大减免了复杂的操作。
2.当需要在图上标出各区域代号的时候,开始是采用的自己添加文字的方法,操作过于机械,复杂;后面使用了自动标注的方法,使得步骤简化。
3.单独建立一个图层来标注监测站,比起在原图上标出,也能很方便的调出数据,便捷。
实验三屏幕跟踪矢量化作业一、实验目的1.通过投影选择和控制点配准,了解GIS中投影的概念,图形配准的概念;2.将一个典型栅格图象在屏幕上实现投影选择、控制点配准和手工跟踪矢量化;3.对矢量化的图作进一步操作处理,加深对数据获取中误差的理解。
二、实验要求1.投影选择和控制点配准概念;2.利用扫描图象在屏幕上实现手工矢量化;3.对矢量化的图作进一步操作处理。
三、实验内容及步骤1.正确设置地图的坐标系、投影、地图方向和单位, 设置控制点坐标;2.利用扫描图象在屏幕上实现手工矢量化;3.建立北京市图11个区的属性表,属性表最少有面积字段;对建立北京市图11个区的进行自动注记,着色;分别求出北京市各区的面积及北京市总面积,并分析产生误差。
《3S 技术的集成及其应用》 讲义
《3S 技术的集成及其应用》讲义一、3S 技术概述3S 技术是指遥感(Remote Sensing,RS)、地理信息系统(Geographic Information System,GIS)和全球定位系统(Global Positioning System,GPS)这三种技术的集成。
这三种技术各具特点,相互补充,为解决众多领域的问题提供了强大的支持。
遥感技术是一种通过非接触方式获取目标物体信息的技术。
它利用传感器接收来自地表物体反射或发射的电磁波信号,并对这些信号进行处理和分析,从而获取地表物体的特征和状态信息。
遥感技术具有大面积同步观测、时效性强、数据综合性和可比性等优点,能够快速提供大面积的地表信息。
地理信息系统是一种用于采集、存储、管理、分析和展示地理空间数据的计算机系统。
它可以将地理空间数据与属性数据相结合,进行空间分析和建模,为决策提供支持。
GIS 具有强大的空间分析能力、数据管理能力和可视化表达能力,能够对复杂的地理现象进行深入分析和研究。
全球定位系统是一种基于卫星的导航定位系统,能够为用户提供高精度的位置、速度和时间信息。
GPS 具有高精度、全天候、全球覆盖等优点,广泛应用于导航、测绘、地质勘探等领域。
二、3S 技术的集成3S 技术的集成不是简单的叠加,而是通过数据融合、系统集成和功能互补等方式,实现更强大的功能和更广泛的应用。
数据融合是 3S 技术集成的基础。
通过将遥感获取的图像数据、GPS 测量的位置数据和 GIS 中的地理空间数据进行融合,可以获得更全面、更准确的地理信息。
例如,将遥感图像与GPS 定位数据相结合,可以实现对遥感图像的精确定位和校正;将遥感数据和GIS 数据融合,可以进行土地利用变化监测、森林资源调查等。
系统集成是将 3S 技术的硬件和软件进行集成,形成一个统一的系统平台。
例如,将遥感传感器、GPS 接收机与 GIS 软件集成在一起,可以实现数据的实时采集、处理和分析,提高工作效率和数据质量。
7_3S集成技术
3.3S集成综述
3.3S集成综述
RS、GIS、GPS集成的方式可以在不同的技术水平上 实现: 三种系统分开而由用户综合使用 三者有共同的界面,做到表面上无缝的集成,数据 传输则在内部通过特征码相结合 整体的集成,成为统一的系统。 目前一般工具软件的实现技术方案是:通过支持栅格 数据类型及相关的处理分析操作以实现与遥感的集成, 而通过增加一个动态矢量图层以与GPS集成。对于3S 集成技术而言,最重要的是在应用中综合使用遥感以 及全球定位系统,利用其实时、准确获取数据的能力, 降低应用成本或者实现一些新的应用。
ห้องสมุดไป่ตู้
2.GIS与全球定位系统的集成及具体技术
作为实时提供空间定位数据的技术,GPS可以与地 理信息系统进行集成,以实现不同的具体应用目标: 1)定位 主要在诸如旅游、探险等需要室外动态定位信息的 活动中使用。通过将GPS接收机连接在安装GIS软 件和该地区空间数据的便携式计算机上,可以方便 地显示GPS接收机所在位置并实时显示其运动轨迹, 进而可以利用GIS提供的空间检索功能,得到定位 点周围的信息,从而实现决策支持。
1.GIS与遥感的集成及具体技术
遥感影象是空间数据的一种形式,类似于GIS中 的栅格数据。但遥感图像的处理和 GIS中栅格数 据的分析具有较大的差异,遥感图像处理的目的 是为了提取各种专题信息,其中的一些处理功能, 如图像增强、滤波、分类以及一些特定的变换处 理(如陆地卫星影象的 KT 变换)等,并不适用 于 GIS 中的栅格空间分析,目前大多数 GIS 软件 也没有提供完善的遥感数据处理功能,而遥感图 像处理软件又不能很好地处理 GIS数据,这需要 实现集成的GIS。
1.GIS与遥感的集成及具体技术
在软件实现上,GIS与遥感的集成,可以有以下三个不 同的层次[Ehlers]: 分离的数据库,通过文件转换工具在不同系统之间传 输文件; 两个软件模块具有一致的用户界面和同步的显示; 集成的最高目的是实现单一的、提供了图像处理功能 的GIS软件系统。 在遥感和地理信息系统的集成系统中,遥感数据是 GIS 的重要信息来源,而 GIS 则可以作为遥感图像解译的强 有力的辅助工具,具体而言,有以下的应用方面 [J. C. Hinton]:
3S技术实习报告
3S实习报告一、实习目的:1.掌握GNSS数据采集, RS影像及航测影像处理、信息提取,GIS分析与制图等技术,培养学生的系统集成能力,提高学生的动手实践能力。
2.了解GNSS技术、RS技术、GIS技术在工程实践中的综合应用。
3.理解、掌握3S技术集成以及发展趋势,学会用3S技术解决工程中的一些问题。
二、实习地点:(GNSS数据采集)。
三、实习内容1.工作区控制点数据的采集(GNSS数据采集及处理)。
(1)静态GPS的选择与设置;(2)数据导入;(3)坐标转换与投影变换;(4)生成控制点文件。
2.RS影像及航测影像处理与信息提取。
(1)RS影像处理,包括遥感图像的几何校正、增强、配准、裁剪等;(2)专题信息提取(即遥感影像分类)。
3.GIS信息分析与制图(1)统计各类别的面积;(2)制作分类后的专题图。
四、主要步骤:1.实验原理:依据GNSS、RS、GIS以及计算机等相关学科原理与方法开展3S综合实习。
2.主要步骤:流程图如下(一)GNSS数据采集1、基本步骤:GNSS的使用和工作区控制点数据的采集。
主要包括:1)控制点规划设计;(在遥感影像上设计12个控制点,架设基站,利用已知点坐标解算四参数)2)设定GNSS 仪器的坐标系统;3)依据方案采集控制点坐标;4)在电脑上导入采集的数据;5)保存数据文件,作为遥感数据处理和GIS 制图的控制点数据。
二、RS 影像处理、信息提取1、图像的几何校正 1)将已有的备用map_proj 文件替换EXELIS\ENVI51\classic\ map_proj 文件2)打开ENVI CLASSIC ,打开待校正图像3)主菜单Map →Registration →Select GCPs:Image to Map 命令,对该图像定义坐标系,在Image to Map Registration 对话框中可选择N ew…自定义坐标系,选择坐标系信息CGCS_2000_3_Degree_GK_Zone_42N ,选择像元大小图1-1-14)在ground control points selections 界面点击add point 选取控制点,选中点之后输入测得的正确坐标,选取完毕后还可以点击上方file →save 导出所选择的坐标文件以便下次使用5)点击options 下方菜单warp file 后,选择待校正影像,点击ok ,设置相关参数,设置存储文件名和存储路径,点击ok ,输出6)可在窗口点击news dispay 加载校正过后的图。
3s集成技术应用实例资料
2、海洋资源开发中的 “3S”技术应用
长期以来,海洋捕鱼主要依靠“鱼老大”的直观经验 Welcome to 在茫茫大海中确定渔场的位置,显然,这种作业技术十分 落后,捕鱼量不可能稳定高产。事实上,海洋的鱼群运动 HUAWEI Technologies 以及鱼饵料的时空分布是有规律可循的。海洋鱼群对海洋 presentation 生态环境有极大的依赖性。水温、水色、海流、风场、盐 度等海洋环境参数及其变化控制着鱼类的生存、繁殖、洄 游、分布以及中心渔场位置、渔期早晚和捕获量,这为遥 感、地理信息系统和全球定位系统在开发海洋渔业资源方 面的应用提供了可能性。
GIS 技术在全球变化监测中的应用 全球变化数据检索与查询。 Welcome to 如全球变化研究中,海-陆-气相互作用和水 HUAWEI Technologies 分循环在全球变化的区域响应中起着关键的作用。 上述研究,涉及大气、海洋、地理、水文和生态多 presentation 种学科的大量数据和多种遥感资料,它需要利用 GIS 技术进行管理、检索和查询。
GPS 技术在全球变化监测中的应用
Welcome to 利用 GPS 定位技术监测气候变暖导致的海平 HUAWEI Technologies 面上升。利用高精度 GPS 测量地球表层的板块运 动。 presentation
6、其它领域中的“3S”技术应用
Welcome to 1 、环境动态监测与环境保护 HUAWEI Technologies presentation 2 、防灾、减灾、救灾
遥感在 精细农业 中的作用
全球定 位系统在 精细农业 中的作用
地理信 息系统在 精细农业 中的作用
遥感在精细农业中的作用 遥感技术可以客观、准确、及时的提供作物生 Welcome to 态环境和作物生长的各种信息。它是精细农业获得 HUAWEI Technologies 田间数据的重要来源。
3s实训报告
3s实训报告尊敬的实训导师:我荣幸地向您呈交我在3s实训期间所进行的工作报告。
以下是我在实训期间的学习、任务和成果的详细描述。
1. 实训概述3s实训是一个为期三个月的专业实践培训项目。
通过该项目,我有机会接触到不同领域的技术和实际应用。
在实训的过程中,我与团队成员紧密合作,共同完成了一系列有挑战性的项目任务。
2. 项目一:xxx在此次实训的第一个项目中,我们团队负责开发一个xxx。
我们首先进行了需求分析,明确了用户对于xxxx的需求和期望。
接着,我们进行了技术研究和方案设计,选择了xxx技术作为我们的开发框架。
在开发过程中,我们充分发挥了团队合作的优势,每个人都充分发挥自己的专长,确保项目进展顺利。
最终,我们成功交付了一个高质量的xxx,并获得了用户的高度评价。
3. 项目二:xxx第二个项目是xxx。
这个项目的挑战在于xxx。
为了实现这一目标,我在项目开始之前进行了大量的研究和学习,深入理解了相关技术和工具。
在项目执行过程中,我采用了xxx的方法和技术,确保项目高效进行。
最终,我们成功完成了xxx,并向客户提供了一套满足其需求的解决方案。
4. 项目三:xxx在第三个项目中,我们团队负责开发一个xxx。
这个项目的关键点在于xxx。
为了保证项目的成功,我们进行了充分的沟通和协调,并制定了详细的项目计划。
在开发过程中,我们采用了敏捷开发的方法,通过迭代和反馈不断改进我们的设计和实现。
最终,我们成功交付了一个高质量的xxx,并超过了客户的期望。
5. 实训总结通过参与3s实训,我获得了宝贵的经验和技能。
首先,我学会了如何与团队成员协作,解决问题和应对挑战。
其次,我掌握了一些先进的技术和工具,提高了我在软件开发领域的专业素养。
最重要的是,我在实训中培养了自信心和团队合作的能力,这将对我未来的职业发展具有重要的影响。
总的来说,3s实训是一次非常有益的经历。
我相信我所学到的知识和经验将在我以后的工作中发挥重要的作用。
3S技术集成及其在地质领域里的应用研究
3S技术集成及其在地质领域里的应用研究摘要:3S技术的交互和融合,使得空间数据的获取、处理、更新和使用方式有了很大的提高。
综述了3S集成技术,介绍了3S技术在地质领域中的应用,并以3S技术在四川省雅安市地震救灾中的具体应用为例进行了分析。
揭示了3S技术在地质领域中应用的不足,对3S 技术的未来发展进行了展望。
关键词:3S技术集成;GPS技术;RS技术;GPS技术;地质应用13S技术及其系统集成3S 技术是指地理信息系统(Geography Information Systems,简称GIS)、遥感技术(Remote Sensing,简称RS)和全球定位系统(Global Positioning Systems,简称GPS)的统称,是空间多角度计算机科学技术、检测与信息技术、卫星定位与导航通讯技术相结合,多学科高度集成的现代信息技术[1]。
3S系统集成如图1所示。
地理信息系统(GIS)、遥感(RS)和全球定位系统(GPS)作为现代空间处理的三大支撑技术,它们在3S集成系统中各自担任着不同角色。
GPS主要是提供实时、全天候和全球性的导航服务,为遥感数据赋予空间坐标,对遥感数据进行校验和补充。
RS用于指非接触的,远距离的探测并提供大批量实时动态变化的廉价地理信息。
GIS是信息的“大管家”,GPS、RS作为该系统的数据源。
它是在计算机硬、软件系统支持下,对整个或部分地球表层(包括大气层)空间中的有关地理分布数据进行采集、储存、管理、运算、分析、显示和描述的技术系统。
3S集成系统能够智能化地处理和分析数据,为各种应用提供科学的辅助决策。
目前,3S技术集成研究正在逐步发展和完善,已经有了一定的突破。
在3S技术集成的初级阶段,系统之间的集成是通过相互调用一些功能来实现的;在3S技术集成的高级阶段,三者之间的集成不仅仅是功能上的相互调用,而是有机的一体化系统:一个动态的、可视的、不断更新的、通过计算机网络能够传输的、三维立体的、不同地域和层次都可以使用的“活”系统[2]。
3S技术集成之我见
3S技术集成之我见3S是遥感(RS)、地理信息系统(GIS)和全球卫星定位系统(GPS)的统称,3大技术共同支撑了目前对地观测系统中空间信息的获取、存贮管理、更新、分析和应用工作,是现代社会资源管理、城乡规划及环境动态监测的重要技术手段。
3S中的每一项技术都有着各自的优势,在它们集成之前,三者都有着各自独立、平行的发展。
RS是在不直接接触的情况下,对目标或自然现象进行远距离感知的一种探测技术。
经过几十年的发展,遥感表现出它的多传感器、高分辨率和多时相等特征,已从单一遥感资料向动态监测过渡,从对资源与环境的定性调查向计算机辅助的定量自动制图过渡,从对各种现象的表面描述向软件分析和计量探索过渡。
GIS是一种由硬件、软件、数据和用户组成的,以研究地理或地学数据的数字化或图形化采集、存贮、管理、描述、检索、分析和应用与空间位置有关的相应属性信息的计算机支持系统。
它不仅可以像传统数据库管理系统那样管理数字和文字,也可以管理空间信息。
另外,它可以利用各种空间分析算法,对各种空间数据信息进行综合分析。
GPS是有美国研制的新一代卫星导航和定位系统,与其他定位系统相比,GPS具有全天候全球覆盖、高精度、多用途、定位速度快及自动化程度高等特点。
在RS、GIS和GPS的独立发展过程中,由于三者在功能上具有明显的互补性,人们渐渐地认识到只有将它们集成在统一的平台中,它们的优势才能得到充分的发挥。
就这样伴随着3S技术的不断进步,它们被必然的结合在一起。
3S的集成如果想得到更好的发展,就必定要有一定的理论作为支撑,就必定要有一些固定的模式供学者们研究并拓展。
3S集成的主要模式包括,RS与GIS的集成、GIS与GPS的集成、RS与GPS的集成以及3S整体集成。
RS与GIS的集成式3S中集成中最重要也最核心的内容。
自陈述彭先生的描述起,RS 与GIS集成中较权威的描述为:RS为GIS提供稳定可靠的数据源,GIS为RS提供区域背景信息,用于语义和非语义信息的自动提取。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
பைடு நூலகம்
1. supervisd 表示监督分类。其中包括:Parallelepiped(平行 六 面体 分 类), minimum(最小距离分类),mahalanobis(马氏距离),maximum likelihood (最大似然法),spectral angle mapper(光谱角制图),binary encoding (二进制编码) ,spectral information divergence( 光 谱 信 息 散 度 ),neural net(神经网络) ,support vector machine(支持向量机)
2.选择 georeferenced 出现一下对话框。通过 import->import file 打开需要镶 嵌的数据。如下图所示。
3.在遥感影像上右键可以选择该图像是处于其他影像的上面( raise image to top )还是下面(lower image to bottom)。点击 Remove entry 可以删除该副 影像。 4.点击 edit entry 调节镶嵌的方法。
1.1.spatial subset 表示:你要矫正的空间范围。后面的 full screen 表示把 整副影像进行配准。在最上面的一个信息框中我们可以看到图像的大小。这里为 : dims:414X498(bybt), samples 表示选择的列长度,lines 表示选择的行的长 度。同时可以点击其中的 map 可以通过鼠标拉框来选择,也可以通过 file(文 件)的 ROI(感兴趣区域)/EVF 来选择处理的影像范围。这样做的目的是为了节 省内存,减少不必要的数据冗余。 1.2.spcetral subset 表示:你要校正的波谱范围。可以全部选择波谱,一可以 选择对部分的波谱进行校正。这里我们选择 6 个波段全选。
5. 调整好数据之后选择 file->apply 按照下图设置 X/Y 的像素值,重采样的方法(最临近值发,双线性内插和立
方卷积),存储的位置,背景颜色和使用的平衡颜色方法。边的到镶嵌后的图像 。
6.点击 ok 完成图像的镶嵌。
三)几何校正
几何校正是指消除或改正遥感影像几何误差的过程。遥感成像的时候,由于
其中 data value to ignore 表示忽略的像素值,一般为 1. feathering 表示进行运算是拓展的像素值,这里选择 1. cutline feathering 表示通过通过剪切线进行镶嵌。点击他会出现让你选择 裁剪线的对话框。 Mosaic 可以选择 gray scale 或者 rgb。他只是一个图像的显示与否的过程, 也可以在以后的浏览中选择需要的光谱图层。 Liner stretch 表示现行拉伸程度。一般为 1%。 Color balancing(颜色平衡)选择 adjust,表示按照具体光谱情况灵活的 镶嵌。 以上的方法大多都是针对影像融合是相交部分的影像而提出的。具体如下图 所示:
2. Unspervised 表示非监督分类。包括 ISOTATA (iterative selforganizing data analysis techniques algorithm)迭代自组织的数据分类,他和其他 的方法相比增加了一些人机交互的功能。K-means 表示 K 变化。
选择空间范围
选择波谱范围
2.完成选择后点击一路 ok,知道出现要选择输入坐标文件 chosen out put
file 找到需要相应的文件便可完成校正
B.通过到图上读取经纬度信息来校正地形图。
1.通过 map--->registration�image to map 进入校正模块。如下图
2.接着选择投影信息,椭球体,单位,投影带和空间分辨率。 2.1 其中最上面的是投影信息。datum 表示椭球体,units:单位。Zone:
飞行器的姿态、高度、速度以及地球自转等因素的影响,造成图像相对于地面 目 标发生几何畸变,这种畸变表现为象元相对于地面目标的实际位置发生挤压、扭 曲、拉伸和偏移等,针对几何畸变进行的误差校正就叫几何校正。 主要方法有:
A.用已有控制点(gcp)的文件来校正影像。 1.通过工具条的 map——>Georeferenced modis 打开数据。
3.在任意多波段的融合过程中 cn spectral 和高保真的 Gram—schmidt 适合于高 光谱数 据 的融 合, pansharping 包括高 分 辨率 的影 像 的融 合 。下 面介 绍 pc spectral sharpening (只成分分析)。 4.点击 pc 变化弹出以下对话框。先输入低光谱分辨率的高空间分辨率的遥感影 像,再输入低空间分辨率的高光谱数据。如下图所示:
5.当然也可以通过 map�registration—>
来
通过控制点文件进行校正。
四)图像裁剪。
为了得到一幅范围比较大的一幅图上的部分数据我们常常需要对拼接好的 数据进行裁剪。得出研究区域的影像数据。有好多的方法。包括栅格裁剪栅格。 矢量裁剪栅格和矢量裁剪矢量等。在这里为了方便我们用矢量裁剪栅格影像。矢 量的数据来自于对行政区划图的矢量化。
“2+2”模式下地理信息系统专业专业选修课程
《3S 集成技术》 实 验 报 告
院 系:旅环院 班 级:0 级地信 姓 名:王磊 学 号:40809127
实验时间:2011 年 3 月——2010 年 6 月 实验地点:长安校区 GIS 基础实验室 实验目的:通过工程化实验,对地理信息系统软件 ENVI 的基础功能
各个行业应用会有所不同,比如在精细农业方面,在大气校正方面要求会 高 点,因为它需要反演;在测绘方面,对几何校正的精度要求会很高。下面就实际 应用时经常遇到的影像预处理的部分方法做以介绍:
一.) 图像融合:
图像融合(Image Fusion)是指将多源信道所采集到的关于同一目标的图像 数据经过图像处理和计算机技术等,最大限度的提取各自信道中的有利信息,最 后综合成高质量的图像,以提高图像信息的利用率、改善计算机解译精度和可 靠 性、提升原始图像的空间分辨率和光谱分辨率,利于监测。具体方法如下:
实验内容: 第一部分:遥感影像预处理 第二部分:遥感影像解译 第三部分:植被指数的提取和变化监测
第一部分:遥感影像预处理
预处理是遥感应用的第一步,也是非常重要的一步。目前的技术也非常成熟 , 大多数的商业化软件都具备这方面的功能。预处理的大致流程在各个行业中有 点 差异,而且注重点也各有不同。
数据预处理的过程包括几何精校正、配准、图像镶嵌与裁剪、去云及阴 影处理和光谱归一化几个环节,具体流程图如图所示。
第二部分:遥感影像解译
图像解译——影像解译,也称判读或判释,指从图像获取信息的基本过程。 即根据各专业 (部门)的要求,运用解译标志和实践经验与知识,从遥感影像上 识 别目标,定性、定量地提取出目标的分布、结构、功能等有关信息,并把它们表 示在地理底图上的过程。例如,土地利用现状解译,是在影像上先识别土地利 用 类型,然后在图上测算各类土地面积。遥感影像目视解译是解译者通过直接观 察 或借助一些简单工具 (如放大镜等 )识别所需地物信息的过程。 具体做法如下:
投影带这里选择 49.X/Y pixel size 表示最小的像元大小,在遥感影像上表 示为图像的空间分辨率。把数据选择好后点击 ok。出现下图
3.在地形图上读取到正确的经纬度信息,填写在右面的框中。E 填写经度,N: 填写纬度。这样就完成了给一个没有确定空间坐标的数据加上 GIS 空间参考。 完成了数据的校正。 4.完成控制点【一般为 n*(n-1)/2】的选取后点击 ok,完成校正。当然也 可以在在 add point 中手动添加控制点,也可以在 show point 来查找和修改 控制点。如下图:
操作:在 arctool box 中搜寻 mask 工具,选择 ectract by mask 如下图:
在第一个对话框中输入待裁剪的栅格数据,第二个对话框中输入用来裁剪的数 量 数据。最后的对话框找个存储路径存储裁剪后的图像。然后对该影像进行保存。 方法为在 layer 上右键选择 data-�export data 选择遥感影像的 img 格式存储 数据。结果如下图:
3. 点击 import file 按住 ctrl 键选择需要融合的多波段数据。 在 output file range 中选择 inclusive ,他表示把所有的波段都参加运算。 当然也可以选择下面的 exclusive(高级工具),他表示把各个图层融合是用 overlap 方法来做。接着在下面 output resoult to 选择要输出的文件。可以通 过 file->chose 把他存在需要的文件夹中。如果数据量小的话也可以存放在内存 中(选择 memory)。内存里面的数据在波段列表中可以方便的打开浏览。
和基本的使用方法有一个较为全面的认识、了解和掌握, 并能较为熟练地运用该软件制作地图,从而对地理信息系 统这门课程的实用性、技术性加以体会,提高学习兴趣。 实验数据:数据分遥感影像集和带有高程数据的 DEM 数据。数据的来 源:
/data/landsat/(总网址)
4. 融合后的数据可以在当前窗口中打开,也可以在 envi zoom 中打开。我习惯 在 envi zoom 中打开浏览数据。融合后的数据如下图所示。我用的是 543 标 准假彩色显示。
B.不同传感器数据的融合,及高光谱和高分辨率数据的融合。
1.上面的融合只是简单的同一种传感器同一时相不同波段的融合。具体说应该是 TM 影像的 7 个或者 5 个波段的融合。除此之外还有不同时相和不同遥感影像之 间的融合。他是将低分辨率的高光谱影像和高分辨率的但波段影像进行重采样 融 合生成一幅高分辨率的高光谱影像。我简单说一下方法。 2.通过菜单栏的 Transform->Image sharpening 下面的五种方法进行融合。其中 HSV 和 color normalized(brovey)输入和输出的都是三个波段的影像数据。其 他的合成的结果是任意的多波段融合。