单绳缠绕式提升机钢丝绳动力学仿真研究
单绳缠绕及多绳摩擦式提升机机械结构介绍

单绳缠绕及多绳摩擦式提升机机械结构介绍单绳缠绕式提升机主要由提升机主机、受力机构和控制系统组成。
1.提升机主机提升机主机是整个提升机的核心部分,它由电机、减速器、卷筒、制动器等组件构成。
电机通过轴连接减速器,减速器通过内齿轮传动将电机的高速旋转转化为提升机所需的低速高扭矩旋转力。
卷筒是提升机主机的关键部件,它通过卷绕提升绳来实现货物的升降。
制动器是为了确保提升机停止时能够立即刹车,防止由于制动失效导致的意外事故发生。
2.受力机构受力机构主要包括提升绳、滑轮、导向鼓等。
提升绳是承担货物重量的部件,通常使用钢丝绳,在提升机主机的卷筒上卷绕成若干圈。
滑轮主要起到导向和转向作用,使提升绳顺利地缠绕在卷筒上。
导向鼓是卷绕提升绳的辅助装置,使绳索在卷绕过程中保持稳定。
3.控制系统控制系统包括电气控制设备和控制装置。
电气控制设备主要包括电气元件、接线盒、开关等,用于控制提升机的启动、停止和运行方向。
控制装置通常安装在提升机的驾驶室或控制台上,操作员通过控制装置来控制提升机的运行。
多绳摩擦式提升机也是一种常见的提升设备,它采用多根绳索与摩擦轮配合,通过提升绳的张力来提升货物。
1.提升机主机多绳摩擦式提升机的主机主要由电动机、驱动装置和摩擦轮组成。
电动机通过减速器将电机的高速旋转转化为提升绳所需的低速高扭矩力。
驱动装置通过传动装置将电机产生的力传递给摩擦轮,使其产生摩擦力。
2.受力机构受力机构由多根提升绳和摩擦轮组成。
多根提升绳固定在提升机的上部和下部,通过摩擦轮产生的摩擦力来提升货物。
摩擦轮上有凹槽用于固定提升绳,保证绳索与摩擦轮之间有足够的摩擦力。
3.控制系统控制系统包括电气控制装置和传感器。
电气控制装置用于控制提升机的启动、停止和运行方向,传感器用于检测提升机的位置和速度,并通过信号反馈给控制装置,实现提升机的自动控制。
总结:单绳缠绕式提升机和多绳摩擦式提升机在机械结构上有所不同,但它们都能够有效地实现货物的升降。
单绳缠绕式矿井提升机原理

01
单绳缠绕式矿井提升机概述
单绳缠绕式矿井提升机的定义与用途
• 单绳缠绕式矿井提升机是一种提升矿物、人员和设备的机械设备 • 主要用于地下矿山和工程建筑领域 • 可以提升重物和人员到一定的高度 • 通过缠绕方式实现提升和运输
• 矿井提升机的主要组成部分包括提升容器、提升钢丝绳、驱动装置和控制系统 • 提升容器用于装载矿物、人员和设备 • 提升钢丝绳负责连接提升容器和驱动装置 • 驱动装置提供动力,使提升容器升降 • 控制系统负责控制提升机的运行
单绳缠绕式矿井提升机的故障诊断与处理
提升机出现故障时,操作人员需要立 即停机,并进行故障诊断
根据故障现象,分析故 障原因,采取相应措施
进行处理
如故障无法排除,操作 人员需要请示上级,并 联系维修人员进行维修
05
单绳缠绕式矿井提升机的发展趋势与展望
单绳缠绕式矿井提升机的技术创新与发展方向
提升机的智能化和自动化程度将不断提高
• 近年来,单绳缠绕式矿井提升机不断发展智能化和环保化 • 如物联网技术和人工智能在提升机中的应用 • 降低能耗和噪音,减少环境污染
单绳缠绕式矿井提升机的优缺点
缺点
• 钢丝绳易磨损,需要定期更换 • 提升高度有限,受井深和钢丝绳长度的限制 • 能耗较高,尤其是高速运行时
优点
• 结构简单,易于安装和维护 • 运行效率高,提升速度快 • 适应性强,可以提升不同载荷和高度 • 安全可靠,具备多种安全保护装置
单绳缠绕式矿井提升机的发展历程
• 19世纪末,英国首先发明了单绳缠绕式矿井提升机 • 初期提升机采用蒸汽动力驱动 • 20世纪初,随着电力技术的发展,提升机开始采用电动驱动 • 二战后,提升机技术得到进一步发展,如自动控制和安全保护 装置的应用
第一部分煤矿单绳缠绕式提升设备竖井箕斗提升选择设计

第一部分 煤矿单绳缠绕式提升设备竖井箕斗提升选择设计一.原始资料:1.矿井年产量: A=60万吨,主井提升设备,采用箕斗;2.工作制度:br=300d,每天两班提升,每班t=7h;3.井筒深度为:Hr=412m;4.受煤仓距井口水平高度为:Hx=16.1m;5.装煤仓距井底车场水平高度为:Hz=21.6m;6.煤的散集密度:r=0.87t/m 3;7.提升方式,采用箕斗提升;8.矿井电压等级为. U=6kv.二.提升容器的选择:1.经济提升速度提升高度:H=H r +H x +H z=412+16.1+21.6=449.7 m经济提升速度:H V j 4.0==7.4494.0⨯=8.48 m/s2.加速度a ,暂取0.8m/s 2,爬行阶段时间u ,暂取10s,一次提升装卸时间θ,暂取8s.θ+++=u V H a V T j jj=81048.87.4948.048.8+++ =81.6s3.一次经济提升量:因没有井底煤仓,不均衡系数C ,取1.15一个水平提升,富容系数f a =1.2;一次经济提升量:tbr T ACa Qj jf 3600== 3002736006.812.115.110604⨯⨯⨯⨯⨯⨯⨯ =4.47 t4.箕斗选择:根据《矿山运输及提升设备》教科书,表7—5,选择竖井单绳提升煤箕斗型号为 ML —6 型其主要参数如下:箕斗名义货载质量:6t;箕斗斗箱有效容积:V=6.6m 3;箕斗质量:kg Qz 5000=;箕斗全高: Hr=9735mm;两箕斗中心距: s=1830mm.5.一次实际提升量:Q=r V=0.87⨯6.6=5.7 t6.所需一次提升时间:s CAa t Qb T f r 1042.1106015.1273007.5360036004=⨯⨯⨯⨯⨯⨯⨯==' 7.所需一次提升速度:24)]([)]([22aH u T a u T a V -+-'-+-'='θθ =27.4498.04)]810(104[8.0)]810(104[8.022⨯⨯-+-⨯-+-⨯ =5.7 m/s三.提升钢丝绳的选择:1.钢丝绳每米的质量:钢丝绳公称抗拉强度选用:b δ=1666Mpa ;安全系数a m ,按规程规定为 6.5;井架高度 H j 暂取为35m.钢丝绳最大悬垂长度:Hc=Hj+Hs+Hx=35+412+16.1=463.1 m钢丝绳每米质量P 为:110z b a Q Q P Hc m gδ+=- =1.4638.95.6166611050005700-⨯⨯+ =4.4 kg/m2.选择钢丝绳:考虑矿井提升深度和经济选型,选用6⨯19股型的钢丝绳。
毕业设计(论文)单绳缠绕式提升机设计
摘要矿山提升机是矿山大型固定机械之一。
矿山提升机从最初的蒸汽机拖动的诞生缠绕式提升机发展到今天的交—交变频直接拖动的多绳摩擦式提升机和双绳缠绕式提升机,经历了170多年的发展历史。
目前,国内外经常使用的提升机有单绳缠绕式和多绳摩擦式两种形式。
提升机主要由电动机、减速器、主轴、滚筒等部分组成,各部分之间分别由联轴器联接。
电动机是动力源,减速器是传动系统,滚筒为执行和控制部分。
矿井提升设备是沿井筒提升煤炭、矸石.升降人员和设备,下放材料的大型机械设备。
它是矿山井下生产系统和地面工业广场相联接的枢纽,是矿山运输的咽喉。
因此,矿井提升设备在矿山生产的全过程中占有极其重要的地位。
矿井提升设备是矿山大型设备之一,功率大,耗电多,大型矿井提升机的功率超过1000KW。
因此矿井提升设备的造价以及运转费用,也就成为影响矿井生产技术经济指标的重要因素之一。
合理的选择,正确的使用和维护具有重要的经济意义。
关键词:缠绕式,提升机,联轴器AbstractThe mine hoist is a large-scale fixed one of mine machinery,Mine hoist from the steam engine drag of the birth of the coil type hoist to today's hand in hand in frequency conversion of directly drive-more rope friction type elevator and the double rope hoist coil type, experienced more than 170 years history,At present, the common use of the hoist a coil type induction-motor-driven hoist rope and more friction type two kinds of forms.Ascension is mainly consist of motor, gear reducer, spindle, roller components, between the parts by coupling could respectively. Motor is power source, reducer is transmission system, roller for implementation and control part Mine is lifting equipment along the wellbore coal gangue, ascension. Lift personnel and equipment, transfer of material mechanical equipment, It is mine production system and the ground industrial square connected hub, is the throat of the mining transport. Therefore, the mine production equipment s have an utmost important position in the ascension of the whole process.Mine is lifting equipment mine large equipment is one of the power, power consumption, large mine hoist power more than 1000 KW. Therefore mine lifting equipment cost and operation cost, also be to affect mine production technical and economic index in one of the most important factors. Reasonable option, the right to use and maintenance has important economic significance.Keyword: coil type, lifting hois, coupler目录摘要 (1)Abstract (2)目录 (3)1 提升机介绍 (1)1.1矿井提升设备介绍 (1)提升容器按其结构可分类如下: (3)1.3 矿井提升的特点 (6)1.4 矿井提升机系统现状 (6)2 常见提升机的简介 (8)2.1 缠绕式、摩擦式提升机的工作原理 (8)单绳缠绕式提升机的工作原理 (9)多绳摩擦式提升机的工作原理 (9)2.2 缠绕式、摩擦式提升机的特点、存在的问题以及解决的方法 (11)缠绕式提升机的特点、缺点以及问题的解决 (11)摩擦式提升机的特点、缺点以及问题的解决 (12)3 矿井提升机的设计选型计算 (13)3.1 设计依据 (13)3.2 竖井提升容器的选择 (13)提升容器的比较及其应用范围 (13)主井箕斗规格的选择 (14)3.3 提升钢丝绳的选择计算 (16)钢丝绳的分类 (16)钢丝绳的标示 (17)钢丝绳结构选择 (17)单绳缠绕式(无尾绳)立井提升钢丝绳选择计算 (17)3.4 天轮选择计算 (21)天轮分类 (21)天轮结构 (21)天轮工作原理 (21)天轮的选型计算 (22)3.5 提升机的选型计算 (23)提升机的表示方法 (23)滚筒选型 (23)滚筒的失效形式及原因 (25)提升机的计算及滚筒大小 (25)提升机强度校验 (29)3.6 提升机与井筒的相对位置 (30)3.7 电动机的选择 (35)3.8 减速器的设计 (36)3.9主轴装置 (37)型矿井提升机主轴装置常见故障及处理措施 (38)卷筒筒壳开裂 (38)3.9.1.2 主轴故障 (38)固定卷筒右支轮内孔磨损 (39)游动卷筒铜套紧固螺栓易剪断 (39)3.9.1.5 游动卷瓦筒铜瓦磨损 (39)制动盘偏摆超差 (39)调绳离合器故障和处理措施 (40)3.9.2 JK型矿井提升机主轴装置技术改造 (40)卷筒由整体结构改为两半装配式结构 (40)主轴承由滑动轴承改为滚动轴承结构 (40)主轴设计 (41)主轴的结构 (41)主轴的强度计算 (42)3.10 制动器选择 (43)盘式制动器组成: (43)盘式制动器的主要特点: (44)工作原理 (44)制动盘结构和要求 (45)制动盘跳动危害 (45)解决矿井提升机制动盘偏摆的方法 (45)3.11 联轴器 (47)联轴器的选择 (47)滚动轴承的选择 (48)3.12 液压站及液压系统 (50)3.13 深度指示器 (50)3.14 保护装置 (51)结论 (51)致谢 (52)参考文献 (52)1 提升机介绍1.1矿井提升设备介绍提升设备是一个系统,提升系统通常有下列主要部分:提升机、提升主钢丝绳、提升容器(箕斗、罐笼、矿车)、天轮(在塔式摩擦提升时是导向轮)、井架(在塔式摩擦提升时是井塔)、罐道(在斜井提升时是轨道)、井筒和井筒装备、装载设备(在罐笼提时是进车装置)、卸载设备(在罐笼提升时是出车装置)、井底装置等。
煤矿在用缠绕式提升机和提升绞车制动力测试方法的研究

由 于提 升 载 荷 、 升 容 器 和 钢 丝 绳 都 是 以 质 量 千 克 为 单 提
位 . 就 要 求 要 知 道 这 些 物 体 所 受 的 重 力 来 对 制 动 力 矩 进 行 这
验 算 在 重 力 场 中 . 球 的 引 力 使 物 体 产 生 重力 加 速 度 . 种 地 这
生 的 制 动 力 矩 与 实 际提 升 最 大 静 荷 重 旋 转 力 矩 之 比 K值 不
应 小 于 3 对 于 质 量 模 数 小 的 绞 车 提 重 载 保 险 闸 的 制 动 : 上
减 速 度 超 过 437条 规 定 的 限 值 时 . 将 保 险 闸 的 K 值 适 当 .. 可 降 低 . 不 得小于 2 ” 但 如 不 考 虑 质 量 模 数 小 的 绞 车 . 考 虑 单 滚 筒 缠 绕 式 提 升 只
荷 重 量 / Q一 提 升 容 器 自重/ O 井 筒 倾 角/。p 提 升 钢 N; : N; Z 一 ;一 丝 绳 每 米 重 量 /Nm)L 一 钢 丝 绳 最 大 倾 斜 长 度 , 尺一 升 ( / ;c m; 提 机 或 提 升 绞 车 滚 筒 半 径/ 容 器 运 行 阻力 系 数 ,滚 动 轴 承 m;一
1 统 5 李 I 媳
燥 矿 莅 用 缠 绕 埋 机 和 埋 绞 车 测 试 法 曲 1 宄
林 泓
( 建 省 煤 炭 工 业科 学研 究 所 福 建 福 州 3 0 0 ) 福 5 0 1
摘要 通 过 对提 升 机 和 提 升 绞 车 制 动 力 测 试 方 法 的 研 究 . 煤 矿 缠 绕 式提 升 机 和 提 升 绞 车 制 动 力测 试 工 作 的 流 程 进 行 总 对
取 : .1 , 动 轴 A A j= .1 ~ .3 一 丝 绳 运 行 时 与 托 O0 5 滑 q 00 3 00 钢 辊 和 底 板 之 问 的 阻 力 系 数 , O1~ .。 .5 02
新型矿用单绳缠绕式提升机松绳保护装置的研究与应用
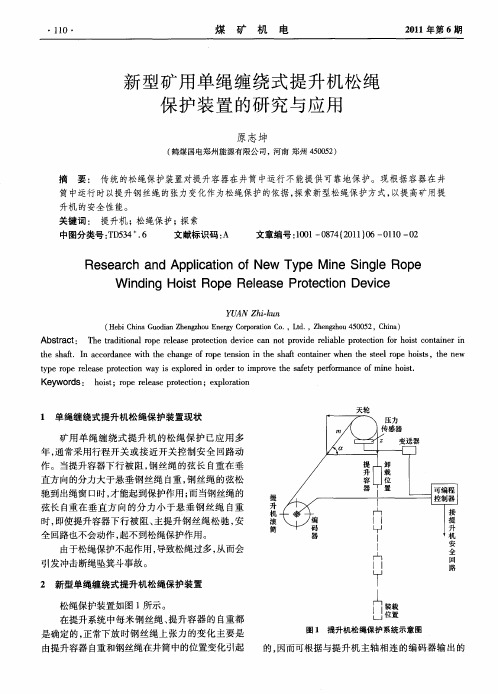
新型松绳保护装置 , 其工作方式是采用欠量保 护, 用设在井架天 轮下的压磁传 感器受压时 ( 磁 压
传感器由于受力不 同而输 出的模拟量不 同) 出的 输 压力 电信号模拟量和给定在可编程控制器中的线性
模 拟 量进 行 比较 , 而来 判断 钢丝绳 的张力 , 从 以运行
给定值和容器被阻时钢丝绳所受到的张力实测 值在直角坐标系中是两条斜率不同的直线。将给定 值 转换成与压磁传感器相对应的 电信号设置在 可编 程控 制器 中 , 是 一 条 数 值 连续 变 化 的直 线 , 设置在可编程控制器 中的模拟量也是一条线性模拟 量, 在可编程控制器中设置一个 比较程序 , 在容器下 放全过程中比较给定在可编程控制器中的模拟量和 压力传感器输 出的实测值 , 当实测值 < F 时松绳 s 保护就立刻动作。
升机 的安全 性 能。
关键词 : 提升机 ; 松绳保护; 索 探 中图分类号 :D 3 . T 54 6 文献标识码 : A
文章编号 : 0 — 84 21 )6— 10— 2 1 1 07 {010 01 0 0
Re e r h a d Ap l a in o w y e Mie Sige Ro e s a c n p i t fNe T p n n l p c o W id n o s p la e P o e t n De ie n ig H i Ro e Ree s r t c i vc t o
2 新型 单绳 缠绕 式提升 机松 绳保护 装置
提 升 机 滚 筒
提升容器的 自重都 是确定 的, 正常下放时钢丝绳上张力 的变化主要是
、
在篓每丝 升的都 提统 钢。 器重 誊 米绳 容自 中 提 升 系
u 且 图 提钢丝绳在井筒中的位置变化引起
单绳缠绕式提升机调绳技术
・
9 4・
煤
矿
机
电
20 07年第 3期
的模 型保存 为 I E 、n G S as格式 , 可 以直接 调入 A S S中。 就 NY
这种方法虽然简单 , 然而对 于结 构复杂 、 特征过 多的模型 , 在 导入 的过程 中一旦结构 发生 变化 , 就得不 到理想的有 限元 模
度高 ; 同时 , 这个接 口能处理各种 复杂的模型 , 无需 对模型进
行简化 , 也不会因对模型进行简化而产生误 差。
3 基 于 集成 平 台 的 压 缩 机 阀板 的 有 限元 分 析
文章编号 :0 1 0 7 2 0 )3— 0 4— 2 10 — 84(0 7 0 0 9 0
单 绳 缠 绕 式 提升 机 调 绳 技 术
1 )实体造型。利用 Po E完成 阀板 的实体 造 型 , r/ 阀板 的主要参数为 : ×宽 ×高 = 12× 2 6× . ( m) 长 7 . 4. 2 8 m 。
2 )模型导入。将阀板模型 导入 A S S中, 现无损 导 NY 实
入, 图 1 示。 如 所
动提 升机进行调整 , 不仅增加 了提 升时间 , 且对提 升机 电气 、 机械均不利 。此外 , 根据《 矿安全 规程》, 煤 单绳缠 绕式提 升 机每季度必须调整提 升钢丝绳与滚筒 咬合点 。因此 , 掌握调
压缩机的排气量和制冷量 , 而在气阀的余隙容积 中由阀板所 产生 的余隙容积所 占比例 相 当大 。减小 阀板 厚 度可缩 小余
1 引 言
隙容积 , 但变 薄的阀板必须满足工作要求 。
( )有限元分析 的前处 理 1
大多新建矿 井在 风井 到底后 , 吊桶 提 升改 为 罐 笼提 将 升, 以缩 短建井工期。凿井一般采用单绳 缠绕式提 升机 , 、 主 副钩罐笼不能 同时分别 到达井 口和井底装 载水平 , 2次启 需
单绳缠绕和多绳摩擦式提升机机械结构的介绍

单绳缠绕和多绳摩擦式提升机机械结构的介绍单绳缠绕和多绳摩擦式提升机是一种常用的货物提升装置,广泛应用于矿山、港口、物流仓储等领域。
其机械结构设计和工作原理直接影响其安全性、工作效率和使用寿命,下面将对单绳缠绕和多绳摩擦式提升机的机械结构进行详细介绍。
单绳缠绕式提升机的机械结构主要包括:提升轮组、驱动装置、制动装置、护罩等部分。
其中,提升轮组是提升机的核心部件,它由主提升轮、副提升轮、支撑滑轮、缆绳等组成。
驱动装置一般采用电动机驱动,通过减速机、联轴器等传递力矩给提升轮组。
制动装置用于实现提升机的停止和保持货物在提升过程中的稳定。
护罩则用于保护提升机的机械部件不受外界物体的侵蚀和破坏。
单绳缠绕式提升机的工作原理是:电动机带动提升轮组旋转,通过缆绳将物体提升至指定高度。
物体的重力通过提升轮和缆绳传递给支撑滑轮,从而实现提升。
当电动机停止时,制动装置自动启动,将提升轮组制动,防止物体自由下落。
多绳摩擦式提升机是一种提高提升效率的装置,其机械结构相对复杂一些。
它由提升鼓轮、架桥、缆绳、摩擦轮、驱动装置等部分组成。
提升鼓轮是多绳摩擦式提升机的核心部件,它由鼓轮胎、顶滚筒、导向滚筒等组成。
架桥是提升机的承重结构部分,它支撑和固定提升鼓轮。
缆绳是连接货物和提升鼓轮的关键部分,它根据提升机的需要采用不同的结构形式,如平行绕组、对绞绕组等。
摩擦轮是用于提高提升机起动力矩和提升效率的装置,它通过压紧缆绳与之接触,并通过摩擦力传递动力。
驱动装置一般采用电动机,通过减速机、联轴器等将动力传递给提升鼓轮。
多绳摩擦式提升机的工作原理是:电动机驱动提升鼓轮旋转,通过摩擦轮将动力传递给缆绳,再由缆绳将动力传递给货物,实现提升。
由于多绳并联工作,所以提升鼓轮的受力均衡,从而提高了提升效率。
当电动机停止时,制动装置启动,防止物体自由下落。
综上所述,单绳缠绕式提升机和多绳摩擦式提升机具有不同的机械结构和工作原理。
单绳缠绕式提升机结构相对简单,适用于装载量较小,要求不太高的场合;而多绳摩擦式提升机结构复杂,但提升效率高,适用于装载量大、要求提升效率高的场合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中图分类号 : TD534 . 2
文献标识码: A
文章编号: 10032 8728( 2009) 0921225205
Dynam ics Sim ulat ion of the H oisting Cab le of Single CableW ind ing H oisting D evice
L iu Y i , Chen Guoding , L i Jishun , Xue Yu j un
2009 年 第 28 卷
9月 第 9期
机械科学与技术 M echan ica l Sc ience and Technology f or Aerospace Engineer ing
September 2009 Vo. l 28 No . 9
单绳缠绕式提升机钢丝绳动力学仿真研究
刘 义 , 陈国定 , 李济顺 , 薛玉君
2 3
1
1
2 , 3ຫໍສະໝຸດ 3( 1 School ofM echa tron ics, Northwestern P olytechn ica lUn iversity , Xi can 710072; H ena m Key Laboratory ofM echan ica l Design and Transm iss ion Syste m, Luoyang 471003; School ofM echa tron ics Engineer ing, H enan University of Sc ience and Technology , Luoyang 471003)
1226
机械科学与技术
第 28 卷
和充分考虑 , 再合理地选取安全系数 , 从而达到对提 升钢丝绳进行安全、 可靠、 经济地选用的目的。目前 [ 5~ 7 ] 多体动力学 是进行系统动力学分析的比较精确 的分析方法。
摩擦与动摩擦系数会随着接触组件的相对滑动速度 而异 , 因为组件之间的摩擦系数较小, 在研究中忽略 此一现象 , 而视过程中组件间的静摩擦及动摩擦系 数为一定值 , 组件 间的摩 擦行 为符 合库 伦摩擦 的 假设。 根据研究的需要 , 仅对单卷筒罐笼提升重物的 工况进行了仿真。以 JK 2 2 / 20 单绳缠绕式提升机为 研究对象建立虚拟样机仿真模型。 JK 2 2 / 20 提升机 主要参数见表 1 所示。
[ 1]
程意义。通常认为在以下几种情况下, 钢丝绳受力 最危险: ( 1) 提升系统启动或制动时; ( 2) 提升容器 以最大速度运行时突然被卡住; ( 3) 提升过卷。 危险载荷 ( 又称非常载荷 ) 和钢丝绳的动态载 荷密切相关, 所以得到钢丝绳的动载荷对提升系统 的设计具有重要的作用; 某些零部件必须按照非常 载荷设计 , 才能确保提升系统的运行安全 。因 此, 研究钢丝绳的动态载荷有着特别重要的意义。 为此 , 需要在对提升系统提升钢丝绳进行动态分析 的基础上 , 对钢丝绳中动载荷进行较为精确的计算
表 1 卷筒 直径 (m) 21 0 天轮 直径 (m) 21 0 JK22 /20 提升机主要参数 钢丝 绳 最大 静 张力 ( kN) 600 钢丝绳 最大静 张力差 ( kN) 600 钢丝绳 直径 ( mm ) 241 5 提升 速度 ( m /s) 5
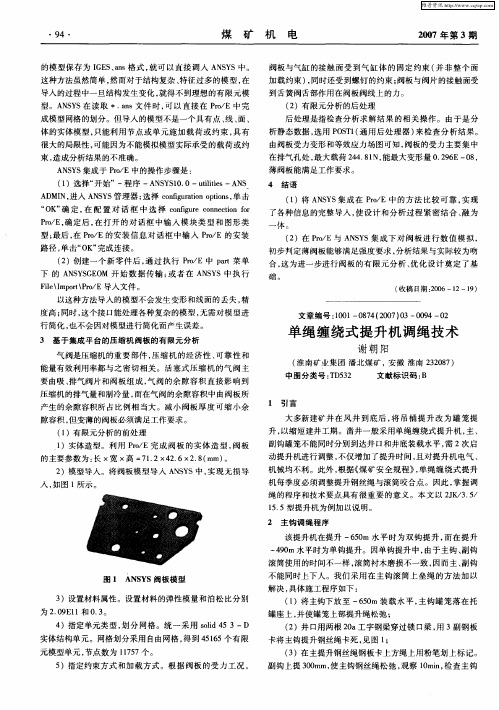
图 1 双卷筒提升机系统示意图
11 2 相对节点法原理 1 模型的建立 11 1 系统的简化 缠绕式单绳提升系统主要由提升卷筒、 天轮、 提 升容器和提升钢丝绳组成。相对其他构件提升钢丝 绳的刚度小得多 , 所以钢丝绳必须进行柔性体建模。 提升机卷筒、 天轮在工作过程中也会因减速箱齿轮 啮合力的变化及可能存在的自身不平衡质量而产生 振动, 但因其牢固地安装在地面基础之上 , 且自身又 具有较大的结构刚性 , 可忽视它的微小振动, 而将其 视为刚体。相对刚度模型的含义是将刚度较小提升 机的钢丝绳看成连续的弹性体 , 将刚性较大的整个 传动系统 ( 包括电动机转子、 齿轮、 转动轴、 联轴器 和滚筒等 ) 看成刚体 , 这种简化对于近年新开发的 新型直联式驱动方式的提升机是非常精确的模型 , 对于中间含有减速器的提升系统, 在考虑整个系统 的动态设计问题时 , 是可以接受的。因为从刚度的 角度来看, 绳系的刚度远小于传动系统的刚度。 为方便研究 , 对提升机系统做必要的简化 : ( 1) 电机、 减速器等所有旋转部分的转动惯量 都集中简化到主导轮卷筒上。 ( 2) 提升主绳利用相对节点法, 利用梁单元建 立多体动力学计算模型。 ( 3) 提升容器简化为形状规则的实体模型。 ( 4) 在提升仿真过程中忽略卷筒直径的变化。 ( 5) 在实际结构中提升钢丝绳与天轮的接触是 钢丝绳与天轮衬垫的接触 , 在分析时利用柔性体与 刚性体的摩擦形式进行模拟。在实际运行过程中静
[ 11] [ 7]
。本文
采用梁单元利用相对节点坐标法建立钢丝绳的多体
第 9期
刘
义等 : 单绳缠绕式提升机钢丝绳动力学仿真研究
1227
相对节点法的原理就 是通过离散以 后得到的 节点 , 利用引 入的相 对节 点坐标 系得到 一系 列节 点的位移方程 , 从而 利用 能量变 分原理 得到 结构 的运动方程。作大范围运动的平面梁如图 2( a) 所 示 , 离散后可以得到一系列编号为 0, 1, 2, , , n - 1 的 n 个节点。从结构中任意取出两个单元 ( 如图 2 ( b) 所 示 ) 进行 研究。引进 两个坐 标系 : X 2 Y2 Z为 惯性参考坐标系 , xk 2 yk 2 zk ( k = i, j) 为关于节 点 k 的 节点 参 考 坐 标 系 ; 设 rk 为 节 点 k 的 位 置 矢 量。 x ( iy( i 1) i 2 z( i 1) i 2
T T ( i- 1) i T k T k T T ( i- 1) i
( 8) ( 9) ( 10 )
(k = i- 1 , i) ]
T
, D ( c
0
T ( i- 1) i
I 0
T
~ ci- 1) i ) - (~ sc ( i- 1) i 0 + u ( I 0 A
T ( i- 1) i
( 11 )
1) i是关于节点 i和 节点 i - 1 的节
程即 D Z i = B( i- 1) i 1 D Z ( i- 1) + B ( i- 1) i 2 D q( i- 1) i D Z k = [ D, D Pc ] D q( i- 1 ) i = [ D uc B ( i- 1) i 1 = A ( i- 1) i 0 B ( i- 1) i 2 = A
[ 2~ 4]
。典型的 双筒提升机系
统示意图如图 1所示。因提升钢丝绳具有较大的弹 性 , 致使提升容器 (罐笼或箕斗 ) 在启动和制动阶段 会因速度的突变 ( 速度激励 ) 而产生较大振动 , 对其 进行动力学分析对提升机的设计具有重要的实际工
收稿日期 : 2008207207 基金项目 : 河南省杰出人才创新基金项目 ( 0621000800) 资助 作者简介 : 刘 义 ( 1974- ), 博士 研究生 , 讲师 , 研 究方 向为机 械设 计 , CAE 仿真 , lunwenxbgd @ 163 . co m
3
1
1
2 ,3
3
( 1 西北工业大学 机电学院 , 西安 710072; 2河南省机械设计及传动系统重点实验室 , 洛阳 河南科技大学 机电学院 , 洛阳 471003)
471003;
刘
义
摘 要 : 基于相对节点法, 提出了一种对提升机构多柔体动力学进行建模和仿真的方法; 以多体系 统动力学为基础 , 利用多体动力学仿真软件 Recur D yn 和有限元分析软件 ANSYS 建立了 JK 22 /20 缠绕式提升机的多柔体动力学仿真模型, 并对所建立的模型进行了动力学仿真研究。 通过研究提 升机提升过程中钢丝绳的传动特性, 揭示了缠绕式提升机提升钢丝绳的运动学、 动力学特性 。多柔 体系统的仿真结果能更真实、 准 确地反映出提升 系统的实际运 动特性, 能够更准确地预 测机构 性能。 关 键 词 : 提升机; 相对节点法 ; 虚拟样机; 仿真
A( i- 1 ) i 0
I H ( i- 1) i
( 12 )
点坐标系。 分别用 u(ci - 1 ) i和 ( (ci - 1 ) i表示相对节点广义坐标 的位置和方向, 节点 i 位置矢量 ri 在 X 2 Y2 Z 的坐标 系中的位置和方向可以用相对于节点 i - 1 的相对 变形公式表示, 即 r i = r ( i- 1 ) + A( i- 1) ( sc ( 1) ( i- 1) i 0 + u c ( i- 1) i ) 式中: Ak ( k = i- 1 , i) 表示节点参考坐标系 k 的转换 矩阵。 sc ( i - 1 ) i 0表 示 在 未 变形 的 状 态 下, 节 点 i 在 x ( i( i - 1) i 1)
图 2 单元示意图
建立提升机的虚拟样机模型 , 关键是建立钢丝 绳的多提动力学模型。目前对于钢丝绳的模拟和研 究主要有 2 种方法 : 即半连续法和离散方法。休斯 顿和卡曼提出计算缆索动力学的有限段模型 , 这 种方法从多体系统出发将缆段离散为一系列铰接刚 性缆段组成的多体系统 , 是用一系列具有不同几何 物理参数的铰接刚性缆段近似无限自由度的缆索, 应用多体理论求解。 Shabana 提出了一种绝对节点 [ 8~ 10] 方法 应用 于柔性多 体动力学 , 而后 的 Sh i m izu 提出了一种方法考虑了结构的旋转效应 动力学仿真模型。
Abstr act: A relat ive noda l based method is proposed to model and si m ulate the dynam ics of the flexible mu lt ibody of a hosting m echan ism. A si m ulation mode l is deve loped for the dynam ics of the flexib le multib ody of a t w ining type hois t ( JK 22 /20) by use of the soft w are Recur Dyn for mult ibody dynam ics and ANSYS for FEA, and the mod2 el is stud ie d dyna m ically by si m ulation. The transm ission characteristics of the hoist ing cable in the process of up2 grad ing are investigated , and the k in ematics and dynam ics characteristics of the w ire rope are d iscovered . Such si m ulation resu lts can we ll reflect dynam ica lly and actually ho w the hosting mechan isms operate , and is helpful for th e pred ic t ion of the perfor m ance of the mechan ism . The research provides a m ethod for studyin g th e kinemat ic s and dynam ics characterist ic s of si m ilar m echanical systems. K ey w ord s : t w inin g type hois; t relat ive noda l method; virtual prototype ; si m u lation 缠绕式单绳提升系统主要由提升机、 天轮、 提升 容器和提升钢丝绳组 成