无源性原理在鲁棒镇定中的应用
不确定广义双线性系统的鲁棒无源控制

满 足上述 条 件 的 A t , B t称 为是允许 的. n() L () k 为 给 出描述 系统 的稳定 与无 源控制 的有 关结 论 , 考 虑 具 有 如 下 形 式 的 不 确 定 广 义 双 线 性 先
系统 :
E A() A t] A t B() =MF() £[
N6 . () ] 2
z 1 =
z£ ()
J
() A+ △ ) + B ∞() 1 一( A() () l + 1
第2 4卷
E P( △ ) () 2 ErB1 () A+ A()] + x () r t + r P e
∑z(H £ ) (, )
㈤ +砌 ∽ .
}
() 4
2 P X( ∞( , x( ∑ £ ) ) £ )
Aug 20 1 2 .
文 章 编 号 :10 —2 5 2 1 ) 40 4 —4 0 892 (0 2 0 —0 10
不 确 定 广 义 双 线 性 系统 的 鲁 棒 无 源 控 制
张 秀华 ,张庆 灵
( 北 大 学 理 学 院 ,辽 宁 沈 阳 10 1 ) 东 1 8 9
解 的存 在性 以及 稳 定性研 究 虽然 已经 取得 了一 定 的成果 [ ]但 仍有 必要 进行 深入 的探 讨 . 1 , 叫
耗 散性 理论 在 系统稳 定性 研究 中起 着 重要 的
性 能 的不稳 定 性. 文将 广 义 系 统 和介 于线 性 与 本 非 线性 系统 之 间 的双 线 性 系 统结 合 起 来 , 一 步 进
z ()=C x()+ ( )+ D1 () £ l . l ’ J
(1 )
式 中 , ∈R 是 状 态 变 量 , ∈R () n () m是 输 入 控 制 , £ ∈R 是 外部 输入 , () n 输 出变 量 ; ∞() p z £ ∈R 是 ∈ × , ∈R (一 1 2 … , 是 常数 矩 阵 ; 卅 n , , ) E, B, C, D 是 适 当维 数 的 已 知 常 数 矩 A, B , D, 阵 , 中 ,a k =r ; A() A t是 时变 不 确 其 rn E  ̄n △ , B() 定实 矩 阵 函数 . 虑 的不 确 定 性 假 定 是 范 数 有界 考
鲁棒控制原理及应用举例.doc
鲁棒控制原理及应用举例摘要:本文简述了鲁棒控制的由来及其发展历史,强调了鲁棒控制在现代控制系统中的重要性,解释了鲁棒控制、鲁棒性、鲁棒控制系统、鲁棒控制器的意义,介绍了鲁棒控制系统的分类以及其常用的设计方法,并对鲁棒控制的应用领域作了简单介绍,并举出实例。
关键词:鲁棒控制鲁棒性不确定性设计方法现代控制系统经典的控制系统设计方法要求有一个确定的数学模型。
在建立数学模型的过程中,往往要忽略许多不确定因素:如对同步轨道卫星的姿态进行控制时不考虑轨道运动的影响,对一个振动系统的控制过程中不考虑高阶模态的影响等。
但经过以上处理后得到的数学模型已经不能完全描述原来的物理系统,而仅仅是原系统的一种近似。
对许多要求不高的系统,这样的数学模型已经能够满足工程要求。
然而,对于一些精度和可靠性要求较高的系统,如导弹控制系统设计,若采用这种设计方法,就会浪费了大量的人力物力在反复计算数弹道、调整控制器参数以及反复试射上。
因此,为了解决不确定控制系统的设计问题,科学家们提出了鲁棒控制理论。
由于鲁棒控制器是针对系统工作的最坏情况而设计的,因此能适应所有其它工况,所以它是解决这类不确定系统控制问题的有力工具。
鲁棒控制(Robust Control)方面的研究始于20世纪50年代。
上世纪60年代,状态空间结构理论的形成,与最优控制、卡尔曼滤波以及分离性理论一起,使现代控制理论成了一个严密完整的体系。
随着现代控制理论的发展,从上世纪80年代以来,对控制系统的鲁棒性研究引起了众多学者的高度重视。
在过去的20年中,鲁棒控制一直是国际自控界的研究热点。
通常说一个反馈控制系统是鲁棒的,或者说一个反馈控制系统具有鲁棒性,就是指这个反馈控制系统在某一类特定的不确定性条件下具有使稳定性、渐进调节和动态特性保持不变的特性,即这一反馈控制系统具有承受这一类不确定性影响的能力。
设被控系统的数学模型属于集合D,如果系统的某些特性对于集合U中的每一对象都保持不变,则称系统具有鲁棒性。
飞行控制系统的鲁棒性设计
飞行控制系统的鲁棒性设计在现代航空领域,飞行控制系统的鲁棒性设计至关重要。
鲁棒性,简单来说,就是系统在面对各种不确定性和干扰时,仍能保持稳定运行和良好性能的能力。
对于飞行控制系统而言,这意味着即使遭遇恶劣的天气条件、突发的机械故障或其他意外情况,飞机仍能在可控范围内安全飞行。
为了更好地理解飞行控制系统鲁棒性设计的重要性,我们先来看看飞行中可能出现的各种不确定性和干扰。
首先,大气环境的变化是一个重要因素。
风速、风向的突然改变,气压的波动,以及温度和湿度的差异,都会对飞机的飞行状态产生影响。
其次,飞机自身的结构和部件可能存在老化、磨损或制造缺陷,这会导致性能的不稳定。
再者,飞行过程中的人为操作失误,如错误的指令输入或未能及时应对突发状况,也是潜在的风险来源。
那么,如何进行飞行控制系统的鲁棒性设计呢?这需要从多个方面入手。
首先,在系统建模阶段,要充分考虑各种不确定性因素。
传统的建模方法可能会过于简化实际情况,忽略一些潜在的干扰。
因此,需要采用更精确、更全面的建模技术,将飞机的动力学特性、空气动力学特性以及各种外部干扰因素都纳入模型中。
这样建立的模型能够更真实地反映飞机在实际飞行中的行为。
传感器的选择和配置也是关键的一环。
高质量、高精度的传感器能够提供更准确的飞行状态信息,帮助控制系统做出更精确的决策。
同时,为了应对传感器可能出现的故障或误差,还需要采用冗余设计,即配备多个相同或不同类型的传感器,通过数据融合和比较来提高系统的可靠性。
控制算法的设计是飞行控制系统鲁棒性的核心。
常见的控制算法包括 PID 控制、自适应控制、鲁棒控制等。
PID 控制算法简单易懂,但在面对复杂的不确定性时,可能表现不佳。
自适应控制算法能够根据系统的变化自动调整控制参数,具有较好的适应性,但计算复杂度较高。
鲁棒控制算法则专门针对不确定性和干扰进行设计,能够保证系统在一定范围内的稳定性和性能,但设计难度较大。
在实际设计中,往往需要综合运用多种控制算法,取长补短。
非线性系统的鲁棒控制研究
非线性系统的鲁棒控制研究随着科技的不断发展,非线性系统的研究变得越来越重要。
非线性系统的不确定性和复杂性使得其在实际应用中难以被精确建模和控制。
而鲁棒控制正是针对这种不确定性和复杂性设计的一种控制方法,可以保证系统的鲁棒性和稳定性。
一、什么是非线性系统非线性系统是指系统输入和输出之间不遵循线性关系的系统。
与线性系统不同,非线性系统的输入响应与输出响应之间的关系是非线性的,其状态方程也是非线性的。
由于非线性系统的特殊性质,其规律和行为常常比线性系统更为复杂。
二、鲁棒控制的基本概念鲁棒控制是一种控制方法,可以保证系统在存在参数变化或外部干扰的情况下仍能保持稳定。
所谓鲁棒性,就是系统面对外部干扰和参数变化时仍能保持稳定的能力。
鲁棒控制的目标是使得系统具有较好的鲁棒性能,以面对不确定性和复杂性。
三、非线性系统的鲁棒控制在非线性系统中,系统的参数通常是不确定的。
这就要求鲁棒控制算法不仅具有在存在外部干扰时保持系统稳定的鲁棒性,还能够适应参数变化。
因此,鲁棒控制在非线性系统中具有更加广泛的应用。
1. 鲁棒滑模控制鲁棒滑模控制是鲁棒控制的一种方法。
滑模控制是一种常见的非线性控制方法,其基本思想是通过引入一个滑动模式,将系统状态限制在一个滑动模式面上实现系统的控制。
滑动模式面是一个特殊的平面,其状态方程是非线性的。
鲁棒滑模控制是针对滑模控制中的不确定性和扰动问题设计的一种方法,其能够保证系统在存在未知的参数扰动时也能保持稳定。
2. 自适应鲁棒控制自适应鲁棒控制是一种用于非线性系统的自适应控制方法。
它可以通过对系统参数的估计和修正来保证系统具有鲁棒性。
自适应鲁棒控制通常包括两个主要的部分:自适应机构和鲁棒控制器。
自适应机构能够实时估计系统的参数,鲁棒控制器则通过对估计值的修正来保证系统的鲁棒性。
3. 非线性鲁棒控制在非线性系统中,系统状态方程是非线性的,系统的稳定性也具有非线性特性。
非线性鲁棒控制是针对这种情况设计的一种控制方法。
非线性系统的鲁棒控制方法研究
非线性系统的鲁棒控制方法研究随着科技的不断发展,非线性系统的研究日益引起人们的关注,其中鲁棒控制是非线性系统研究领域中的重点之一。
鲁棒控制是指在非理想工作环境下,依然能够保持非线性系统稳定的一种控制方法。
本文将从鲁棒控制的基本概念入手,介绍非线性系统的鲁棒控制方法研究。
一、鲁棒控制的基本概念鲁棒控制方法是指在系统工作环境出现变化时,仍能保持系统稳定的一种控制方法。
它的主要任务是对系统进行稳定性分析和控制器设计。
鲁棒控制方法的原理是通过设计合适的控制策略来抵消工作环境的影响,从而保证系统的性能和稳定性。
二、传统鲁棒控制方法的局限性传统的鲁棒控制方法主要是通过设计紧凑的控制器结构和参数来实现系统的稳定性和控制性能,但是这种方法需要对系统模型有深入的了解,才能够对控制器进行准确的设计。
同时,在系统受到外界扰动时,传统的鲁棒控制方法仍存在一定的局限性,无法在非理想工作环境下对系统进行有效的控制。
三、现代鲁棒控制方法的研究进展为了克服传统鲁棒控制方法的局限性,近年来研究人员提出了许多新的方法来解决鲁棒控制问题。
其中,基于自适应控制的鲁棒控制方法是目前研究的热点之一。
基于自适应控制的鲁棒控制方法通过对系统的非线性特性进行分析,设计相应的控制器结构,从而实现对系统的鲁棒控制。
该方法的主要思想是通过自适应控制器来实现对系统的效应补偿和自适应控制,从而提高系统的稳定性和控制性能。
此外,一些新型的控制器结构,如模糊控制、神经网络控制等,也被广泛应用于非线性系统的鲁棒控制中。
四、总结鲁棒控制在非线性系统控制领域中具有重要的研究意义。
随着科技的不断进步,越来越多的鲁棒控制方法被提出和应用于实际控制系统中。
为了实现非线性系统的高性能鲁棒控制,我们需要不断探索新的方法和技术,为非线性系统的控制和应用提供更好的解决方案。
基于参数不确定性定界的移动机器人鲁棒镇定控制
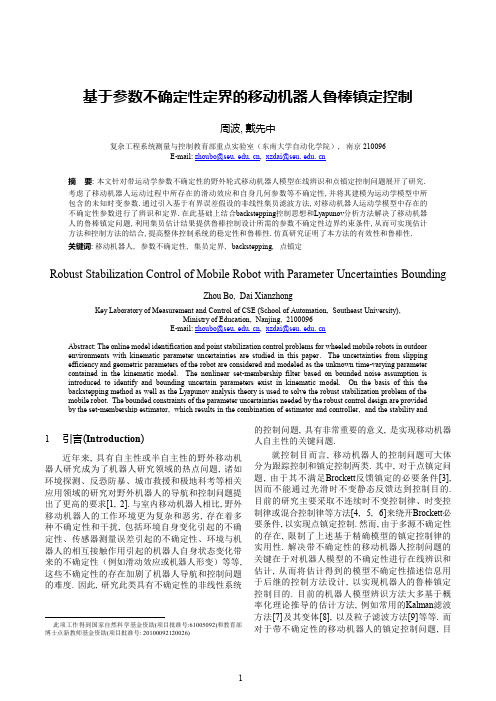
1引言(Introduction)近年来, 具有自主性或半自主性的野外移动机器人研究成为了机器人研究领域的热点问题, 诸如环境探测、反恐防暴、城市救援和极地科考等相关应用领域的研究对野外机器人的导航和控制问题提出了更高的要求[1, 2]. 与室内移动机器人相比, 野外移动机器人的工作环境更为复杂和恶劣, 存在着多种不确定性和干扰, 包括环境自身变化引起的不确定性、传感器测量误差引起的不确定性、环境与机器人的相互接触作用引起的机器人自身状态变化带来的不确定性(例如滑动效应或机器人形变)等等, 这些不确定性的存在加剧了机器人导航和控制问题的难度. 因此, 研究此类具有不确定性的非线性系统此项工作得到国家自然科学基金资助(项目批准号:61005092)和教育部博士点新教师基金资助(项目批准号: 20100092120026)的控制问题, 具有非常重要的意义, 是实现移动机器人自主性的关键问题.就控制目而言, 移动机器人的控制问题可大体分为跟踪控制和镇定控制两类. 其中, 对于点镇定问题, 由于其不满足Brockett反馈镇定的必要条件[3], 因而不能通过光滑时不变静态反馈达到控制目的. 目前的研究主要采取不连续时不变控制律、时变控制律或混合控制律等方法[4, 5, 6]来绕开Brockett必要条件, 以实现点镇定控制. 然而, 由于多源不确定性的存在, 限制了上述基于精确模型的镇定控制律的实用性. 解决带不确定性的移动机器人控制问题的关键在于对机器人模型的不确定性进行在线辨识和估计, 从而将估计得到的模型不确定性描述信息用于后继的控制方法设计, 以实现机器人的鲁棒镇定控制目的. 目前的机器人模型辨识方法大多基于概率化理论推导的估计方法, 例如常用的Kalman滤波方法[7]及其变体[8], 以及粒子滤波方法[9]等等. 而对于带不确定性的移动机器人的镇定控制问题, 目前采取的主要方法来自于鲁棒控制理论的相关结果, 例如鲁棒自适应控制方法[10]、变结构控制方法[11]以及基于后推的控制方法[12, 13]等等. 上述带不确定性的机器人镇定控制方法存在的主要缺点在于没有同时考虑不确定性的辨识和控制问题, 所采用的概率化估计方法对不确定性的概率假设条件在现实中一般难于得到满足和验证, 并且无法给出一般鲁棒控制方法所需的严格不确定性边界约束信息, 因而无法实现估计和控制问题的结合, 以保证机器人控制系统的整体鲁棒性, 在实际中很难得到应用.本文将针对带几何尺寸和滑动效应等混合不确定性运动学参数的轮式移动机器人的镇定控制问题展开研究, 对估计方法和控制方法相结合以解决不确定性机器人的鲁棒控制问题进行了相应的探索. 通过引入集员估计理论的思想[14, 15], 对移动机器人建模过程中存在的多源不确定性作出未知但有界假设, 相比概率化方法更符合实际, 也更易得到验证. 由此可获得未知运动学参数的保证有界估计. 针对机器人的控制设计过程, 通过结合backstepping 控制方法和Lyapunov 分析理论[16]实现了对移动机器人的鲁棒镇定控制, 保证了移动机器人系统的稳定性和鲁棒性.2 移动机器人运动模型的在线辨识 (OnlineIdentification of Kinematic Model for Mobile Robot )2.1 带混合不确定性参数的运动学建模(KinematicModel with Hybrid Uncertain Parameters)图1: 车体平面运动示意图图1所示为一个典型的轮式机器人执行二维平面运动的示意图. 图中给出了Cartesian 坐标系、相对坐标系的定义及车体的基本几何结构(俯视). 其中, r 为左右驱动轮半径;b 表示车体两驱动轮中心的间距;O w X w Y w 表示全局Cartesian 坐标系;O m X m Y m 表示附着在车身上的相对坐标系, 其原点为O m 为两轮中心连线的中点. 移动机器人在Cartesian 坐标系中的位姿可表示为q = [x y ψ]T , 其中x 和y 为机器人的全局位置坐标, ψ为机器人相对于O w X w 轴的方位角. 此外, 移动机器人的线速度和角速度分别定义为v 和ω.根据上述定义, 可获得理想情况下的移动机器人运动学模型[17]为cos cos 0sin sin 001x v v y v z ψψψψωω⎛⎫⎛⎫⎛⎫⎛⎫ ⎪ ⎪⎪=== ⎪ ⎪ ⎪ ⎪⎝⎭ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭q (1) 对于控制变量v 和ω, 可进一步将其表示为()L R 2r v ωω+=, ()L R r bωωω-+= (2)其中ωL 和ωR 分别为左右驱动轮的角速度, 可视为机器人的实际输入.移动机器人的理想运动学模型(1)在实际应用中存在一定的困难, 主要体现在该式没有充分考虑环境对机器人的影响所造成的各种不确定性干扰, 例如地面起伏对机器人的影响、轮地之间的滑动效应以及机器人自身几何参数r 和b 的不确定性或形变等等, 因而往往并不能精确地表示出移动机器人的实际运动特性, 从而给后继的鲁棒控制任务带来困难. 为了解决这个问题, 本文将针对移动机器人与地面之间的滑动效应以及机器人几何参数等不确定性进行建模. 首先, 考虑滑动效应, 可采用如下简单的参数化表达方式12cos 0sin 001s v s ψψω⎛⎫⎛⎫⎪= ⎪ ⎪⎝⎭ ⎪⎝⎭q (3) 其中s 1和s 2表示直接作用在速度v 和ω上的滑动参数,其物理意义为机器人实际速度与输入控制变量的比率. 进一步考虑模型的几何参数r 、b 未知或者运动过程中可能存在的形变, 并将滑动参数不确定性和系统模型几何参数不确定性结合在一起, 同时还考虑其它可能存在的建模不确定性, 可得如下的带不确定性的移动机器人运动学模型1122cos 00sin 0001p v p v ψψ⎛⎫⎛⎫⎛⎫⎪=+ ⎪⎪ ⎪⎝⎭⎝⎭⎪⎝⎭q w (4) 其中v 1 = ωL + ωR , v 2 = − ωL + ωR 为辅助控制变量;p 1 = rs 1 / 2, p 2 = rs 2 / b 为同时考虑了滑动效应和几何参数不确定性的未知时变的混合运动学参数;w ∈R 3为其它非参数化的模型不确定性, 这里建模为对运动学模型的噪声干扰. 则机器人的实际控制输入可表示为()()12L 12R /2/2v v v v ωω-⎛⎫⎛⎫== ⎪ ⎪+⎝⎭⎝⎭η (5)2.2 基于集员滤波的在线模型辨识 (Online ModelIdentification Using Set-membership Filter) 为提高移动机器人系统的稳定性和鲁棒性, 需要考虑式(4)所示的机器人模型中所存在的不确定性运动学参数的影响, 并将其融入到鲁棒控制设计中, 因此必须首先根据能够获取的传感器信息对这些不确定性参数进行在线估计. 然而, 现有的鲁棒控制方法大多假设运动学参数满足某种边界约束条件, 而常用的概率估计方法往往只能够获取不确定性参数的概率分布估计, 因此无法提供控制方法所需的参数约束条件. 为了解决这个问题, 本文拟引入一种基于有界误差假设的集员滤波方法用于移动机器人运动学参数的在线辨识和定界. 该方法的优点主要体现在:一是对所有的模型不确定性(传感器噪声或者建模不确定性等)无需任何先验概率知识, 只需要求其有界即可, 因此更容易在现实中得到验证和满足;二是能够获得状态和参数的可行解集, 从而能够提供相应的不确定性边界约束, 可用于后继鲁棒控制设计过程, 实现估计方法和控制方法的结合. 本文将采用针对非线性系统的扩展集员滤波算法(Extended set-membership filter, ESMF )[14]对不确定运动学参数进行估计和定界. 其最重要的思想是对非线性系统进行线性化处理, 并采用区间分析技术估计线性化误差的范围, 然后采用针对线性系统的最优椭球定界算法对状态和参数进行定界. 其具体算法介绍如下:考虑一个离散非线性状态空间模型如下()1k k k +=+x f x w (6) ()111k k k +++=+y h x v (7)其中, x k ∈R n 、y k ∈ R m 分别为系统的状态矢量和观测矢量;f 和h 为非线性方程;w k ∈R n , v k ∈ R m 分别为过程噪声和测量噪声, 它们满足如下的有界误差假设()()11E ,,E ,k k k k ++∈∈0Q 0R w v (8)这里的记号E (α, P )表示椭球集()()(){}T1E ,1n-=∈--≤P RPa x x a x a (9)其中, α表示椭球集合的中心, P 为椭球的包络矩阵, 且满足正定对称性.设系统的初始状态估计椭球集为()000ˆE ,∈P x x, k 时刻估计得到的系统状态椭球集为()ˆE ,k k P x, 则k+1时刻迭代算法为1) 计算得到k 时刻每个状态的不确定性区间ˆˆ, 1...i ii k k k i n ⎡=+=⎣X x x (10)其中,i jk P 表示k P 的(),i j 元素;2) 对非线性状态方程泰勒展开线性化, 得()()()()()()1,,Tˆˆˆ1ˆˆˆ..2k k k k k k k k k k k h o t +=+-+--+J H x f xx x x x x x x x (11) 其中, J k 和H k 分别为f 在ˆk x处的梯度函数和Hessian 矩阵函数. 从而采用椭球对线性化误差进行定界得到外包椭球为()E ,k 0Q 为()()T T T diag ,,...kn R k k k k k =H X X X X X X (12) ()()2,,,0k kki ii jn k R k R R n i j ⎡⎤⎡⎤==≠⎣⎦⎣⎦Q Q X (13)3) 计算最终的虚拟过程误差椭球()ˆˆE ,k k∈0Q w 这里, ˆk w是由线性化误差和过程噪声相加得到的, 因此涉及到两椭球直和的运算, 可得()ˆ,0,11kk kk k k Q Q Q βββ=+∈-Q Q Q (14) 同理, 对观测方程进行相似的处理, 得到虚拟观测噪声椭球()11ˆˆE ,k k ++∈0R v , 从而实现了对原非线性系统的的线性化.4) 使用椭球直和技术计算预测状态椭球()1,1,ˆE ,k k k k ++P x, ()1,,ˆˆk k k k +=x f x(15) ()1,ˆ,0,11Tk k k kk k k k kβββ+=+∈-P Q P J J (16)5) 使用椭球交集技术计算更新状态椭球边界()11ˆE ,k k ++P x()1,T111ˆ,0,11k k k k k k k kkρρρ++++=+∈-P R W C C(17)()1,T 111,11,ˆˆˆ1k k k k k k k k k k k ρ+-++++⎡⎤=+-⎣⎦-P C W x x y h x (18)1,1,1,T 1111111k k k k k k k k k k kkkρρρ+++-+++=----P P P P C W C (19)()()11,1,ˆˆ1Tk k k k k k k k y h x W y h x δ-++⎡⎤⎡⎤=---⎣⎦⎣⎦ (20)11,1k k k k δ+++=P P (21)其中()11,ˆ111/k k kk k k +++++==∂∂C x x h x x为观测模型的Jacobian 矩阵.上述算法中值得注意的有两点:一是三个滤波器参数βQk , βk , ρk 的选取. 由于两个椭球集直和或交集的外包椭球不是唯一的, 因此可通过选择适当的滤波器参数来获得某指标下最优的椭球[18];二是当δk≥1时, P k +1为非正定阵, 则其表示的椭球边界无意义, 这说明对初始状态和噪声的边界估计不准确, 因此该参数值可用来指示算法的健康性.在本文中, 对于两个需要估计定界的运动学参数p 1和p 2, 由于其动态特性是未知且时变的, 可将其过程模型处理为如下的噪声驱动形式1,k k p k +=+p p w (22)其中p k =(p 1, k , p 2, k )∈R 3为离散化得到的参数矢量;w p ,k ∈R 3为驱动模型的可加性噪声, 同样根据集员思想将其假设为如下的未知但有界误差,p k k ε≤w 或,i ip k kε<w (23) 由此可采用集员滤波方法获得未知时变运动学参数的估计和定界结果.3 基于Backstepping 的移动机器人鲁棒镇定控制设计(Backstepping based Robust Stabilization Control Design ) 3. 1 控制目标(Control Target )移动机器人的点镇定控制的控制目标一般可描述为:给定一个目标参考点q r = [x r y r ψr ]T , 以及移动机器人的实际位姿动态特性(4), 设计辅助控制律u (t) = [v 1 v 2]T 使得()()r 0lim t t →-=0q q (24)其中目标点本身是固定不变的, 通常将其设定为原点, 即q r = 0. 从而控制目标可转化为()0lim t t →=0q (25)根据Brockett 条件[4], 可知系统(4)不存在光滑时不变反馈, 必须寻求不连续控制律、时变控制律或混合控制律来达到镇定问题. 一种常用的方法是将其转化为链式系统[13], 然后对于得到的链式系统设计各种控制律, 这些控制律在原系统下为不连续或时变的, 由此避开了Brockett 条件. 本文将针对具有混合不确定性参数的机器人运动学模型, 采用state scaling 和backstepping 方法设计鲁棒控制律以完成点镇定的控制目标.3.2 控制律设计(Control Design)设两个运动学参数满足如下的边界约束条件min max 111p p p ≤≤, min min222p p p ≤≤ (26)对运动学模型(4)作链式变换012sin cos cos sin x x X Y x X Y ψψψψψ==-=+ (27)并对输入进行变换02u v =, 1u v = (28)得链式系统020*********x p u x p x u x p u p x u ===- (29)对上述链式系统的控制分为如下三步: 1)对020x p u =子系统, 取000u x λ=- (30)可使系统指数镇定.2)State scaling: 注意到对于上面的三角形式, 设定000u x λ=-可很快使0x 镇定, 然而此时000,0x u →→使得剩下的子系统不可控. 为了解决这个问题, 采用状态比例不连续变换110/z x x =, 22z x = (31)得10220212210210z p z p z z p u p z x λλλ=-+=+ (32)注意由0020x p x λ=-, 得到()()()00000p t t x t x t e λ--=, 可知除非()000x t =否则()0x t 不可能为零.3)Backstepping 步骤:对1z , 定义11z ξ=, 取Lyapunov 函数211/2V ξ=, 得21110212021V p z p ξξλξλξ==-+ (33)取()21111z z αλ==+, 得210121V p λλξ=- (34)取()2212111z z z ξαλ=-=-+得2101210212V p p λλξλξξ=-- (35) 取2212/2V V ξ=+, 将221z ξα=+代入, 并设()()22011111a x λλ=-++-+, 得 ()222012121202112021V p p u p p aλλξξξλλξξλ=-++++ (36)从而有()()()()220121212222202102210212222120210221/411/4V p p up p a p p u p p a λλξξξλλλξξλλξξλλλξ≤-+++++=--++++ (37)故而取输入为008006Q00400203O2010204060TImefI,s10204060()()012max2221min22202max01121min114p u p p x p λλλξξλλλξ+=----++ (38)得()22202112121V p p λλξλξ≤--- (39)从而得到辅助控制律为2000v u x λ==- (40)()()max0121222min 1max222020112min 1114p v u ppx pλλλξξλλλξ+==----++ (44)实际的控制输入可通过式(5)计算得到. 3.3 稳定性分析(Stability Analysis)取()22220122/2/2V x ξξ=++=ξ, 这里定义()T 012,,x ξξ=ξ,2表示二阶范数, 由上面的控制律求取过程可知2222000112222V x V λλλξλξλξλ=---≤-=-(41)其中{}0012min ,,λλλλλ= (42)从而有()20t V V e λ-≤ (43)即()()20t t e λξξ-≤ (44)因此()t ξ各分量随时间全局指数收敛. 由()00x t ≠和ξ与x 的变换, 知x 全局指数镇定.上述控制律设计中需注意以下三个问题:1)当x 0(t 0) = 0时, z 1 = x 1 / x 0无意义. 可取u 0 = u 0* ≠ 0, 则经过一段时间t s 后, x 0(t s ) ≠ 0, 此后回到原来的控制设计方法.2)参数λ0, λ1和λ2的选择. 由稳定性分析可知, λ0关系到x 0的收敛速度, λ0λ1关系到ξ1的收敛速度, 而λ2则关系到ξ2的收敛速度. 可取λi > 0, i = 0, 1, 2.3)上述控制律无需知道参数p 1和p 2的具体值, 只需其边界约束条件即可.4 仿真实验(Simulation Experiments )针对带未知运动学参数的轮式移动机器人的在线参数辨识和定界问题以及鲁棒点镇定控制进行了仿真研究. 总的仿真条件设置如下:仿真时间为t = 60s ;采样时间间隔为ΔT = 0.1ms ;机器人驱动轮半径为r = 0.1m ;两驱动轮中心距离为b = 0.35m. 当t < 30s 时移动机器人的参数p 1和p 2均无任何干扰(滑动或几何形变), 即有p 1 = r / 2, p 2 = r / b ;当t = 30s 时假设两个参数均发生阶跃变化, p 1 = 0.8 * r / 2, p 2 = 0.6 * r / b . 通过对参数阶跃变化的检测定界和控制设计来表明本文所提出方法的鲁棒性和有效性.图2为采用非线性集员滤波算法进行运动学参数的在线估计和定界的仿真结果. 算法中参数设置为:设全状态可观测, 则观测噪声边界设置为Q = diag(0. 0012, 0. 0012, 0. 0022), R = diag(0. 022, 0. 022, 0. 022);参数模型驱动噪声边界为10.1k ε=, 20.2k ε=. 从图2(a )可以看出集员算法能够快速地跟踪参数的阶跃变化. 图2(b )为集员算法的参数定界结果, 从图中可知参数的实际值(虚线)始终包含在估计得到的上下边界(实线)之内, 表明了集员估计方法的保证有界估计效果. 图2(c )则给出了性能指标δk 的变化情况, 可以看出δk > 0始终成立, 表明集员滤波方法定界结果的有效性, 其中t = 30s 时性能指标的突变与参数在此时刻的阶跃变化相一致.(a) 参数值估计(b)参数边界估计一0500521864202100000一E、3co量∞o正(c)性能指标图2: 参数在线辨识和定界图3为移动机器人的鲁棒点镇定控制结果. 其中系统的初始状态点(初始位姿)设为q 0=(-1, 1, -π)T , 目标状态点(目标位姿)设为q r =(0, 0, 0)T ;增益参数取为:λ0 = 1, λ1 = 1和λ2 = 1. 图3(a )为系统的轨迹图, 从图中可见移动机器人的轨迹最终将趋于原点. 图3(b )为系统的位姿与目标点即原点的误差, 由图可见三个误差都能够随时间而逐渐变小直至收敛于0. 图3(c )则给出了控制律产生的输入量的变化规律. 图3表明了本文所提出的基于backstepping 方法的控制律可以在参数p 1, p 2未知但有界的情况下将系统镇定到原点, 从而完成全局指数收敛点镇定任务.(a)点镇定轨迹(b)位姿误差(c) 输入控制量 图3: 点镇定控制结果5 结论(Conclusions )移动机器人的控制问题由于其非完整性特点而被视为机器人应用的一个难点问题, 而野外移动机器人在运行过程中所存在的多源不确定性干扰则进一步加剧了问题的复杂程度. 本文针对野外机器人中应用中常见的一类带几何参数不确定性和滑动效应干扰的轮式移动机器人的点镇定控制问题进行了研究, 提出了一种基于backstepping 思想的鲁棒控制律设计方法以获得全局指数收敛镇定结果. 此外, 针对一般鲁棒控制方法需要不确定性参数边界约束条件的问题, 本文引入了一种基于有界误差的集员滤波方法对未知动力学参数进行估计和定界, 从而为控制方法提供所需的严格参数边界, 以实现估计方法和控制方法的结合, 保证控制系统具有更好的稳定性和鲁棒性.参考文献[1] L. Jaulin, A Nonlinear Set Membership Approachfor the Localization and Map Building of Underwater Robots, IEEE Transactions on Robotics, Vol. 25, No. 1, 88-98, 2009.[2]J. Tisdale, Z. Kim, J. Hedrick, Autonomous UAV Path Planning and Estimation, IEEE Robotics and Automation Magazine, Vol. 16, No. 2, 35-42, 2009.[3]C. I. Byrnes, On Brockett ’s Necessary Condition for Stability and the Topology of Lyapunov Functions on R n , Communication Information Systems, Vol. 8, No. 4, 333-352, 2008.[4]I. Kolmanovsky, N. H. McClamroch, Development in Nonholonomic Control Problems, IEEE Control System Magazine, Vol. 15, No. 6, 20-36, 1995.[5]R. M ’Closkey, R. Murray, Exponential Stabilization of Driftless Nonlinear Control Systems Using Homogeneous Feedback, IEEE Trans. on Automatic Control, Vol. 42, No. 5, 614-628, 1997.[6] J. Godhaven, O. Egeland, A Lyapunov Approachto Exponential Stabilization of NonholonomicSystems in Power Form, IEEE Trans. on AutomaticControl, Vol. 42, No. 7, 1028-1032, 1997.[7] Y. Bar-Shalom, Xiaorong Li, T. Kirubarajan,Estimation with Applications to Tracking andNavigation, New York: Willey, 2002.[8] S. Julier, J. Uhlmann, Unscented Filtering andNonlinear Estimation, Proceedings of the IEEE, Vol. 92, No. 3, 401-422, 2004.[9] M. S. Arulampalam, S. Maskell, N. Gordon, etal. , A Tutorial on Particle Filters for OnlineNonlinear/Non-Gaussian Bayesian Tracking, IEEETransactions on Signal Processing, Vol. 50, No. 2, 174-188, 2002.[10] W. E. Dixon, D. M. Dawson, E. Zergeroglu,Tracking and Regulation Control of A Mobile RobotSystem with Kinematic Disturbances: A VariableStructure Like Approach, Transaction of ASME, Vol. 122, 616-623, 2000.[11] H. Wang, T. Fukao, N. Adachi, AdaptiveTracking Control for Nonholonomic Systems withUnknown Parameters, Advanced Robotics, Vol. 16, No. 2, 175-190, 2002. [12] Zhongping Jiang, Robust Exponential Regulation ofNonholonomic Systems with Uncertainties, Automatica, Vol. 36, No. 2, 189-209, 2000. [13] Zhongping Jiang, Robust Controller Design forUncertain Nonholonomic Systems, Proc. of theAmerican Control Conference, San Diego, CA, 3525-3529, 1999.[14] E. Scholte, M. Campell, A NonlinearSet-Membership Filter for On-line Applications, International Journal of Robust and NonlinearControl, Vol. 13, No. 15, 1337-1358, 2003. [15] Bo Zhou, Jianda Han, Guangjun Liu, A UDFactorization-based Nonlinear AdaptiveSet-membership Filter for Ellipsoidal Estimation[J].International Journal of Robust and NonlinearControl, Vol. 18, No. 16, 1513-1531, 2008. [16] J. E. Slotine, W. P. Li, Applied Nonlinear Control,Beijing: China Machine Press, 2006.[17] D. G. Maksarov, J. P. Norton, ComputationallyEfficient Algorithms for State Estimation withEllipsoidal Approximations, International Journalof adaptive Control and Signal Processing, Vol. 16, No. 6, 411-434, 2002.[18] R. D. Luca, M. Vendittelli, Control of WheeledMobile Robots: An Experimental Overview, Springer-Verlag, 2001.。
控制系统鲁棒性分析及其应用研究
控制系统鲁棒性分析及其应用研究控制系统已经成为现代生产和科学研究中不可或缺的组成部分。
然而,由于各种原因,控制系统可能会出现各种问题,并导致系统性能下降。
因此,提高控制系统的鲁棒性是实现高效控制的重要方法。
一、控制系统鲁棒性的定义鲁棒性是指控制系统的性能不受外部扰动影响的能力。
在实际应用中,控制系统经常受到噪声、参数扰动、外部干扰等因素的影响,这些因素可能会导致控制系统性能下降或失效。
因此,控制系统的鲁棒性是指系统能够在这种情况下保持稳定的能力。
二、控制系统鲁棒性的评估方法鲁棒性的评估方法主要有两种:基于频域方法和基于时域方法。
基于频域方法是指在频域上分析控制系统的鲁棒性。
该方法通常使用Bode图、Nyquist图、极点和零点分布等技术来分析系统的稳定性和鲁棒性。
此外,基于频域方法还可以使用H∞控制等技术来提高控制系统的鲁棒性。
基于时域方法是指在时间域上分析控制系统的鲁棒性。
该方法通常使用常微分方程或状态空间模型来描述系统的行为和性能,并通过分析系统的稳定性、响应速度和敏感性等指标来评估系统的鲁棒性。
三、控制系统鲁棒性的应用研究1、医学应用在医学应用方面,鲁棒控制是是检测和治疗系统中的重要方法。
例如,在呼吸系统和心血管系统中常常使用鲁棒控制技术来调节患者的呼吸和心跳。
2、工业应用在工业应用方面,鲁棒控制技术广泛应用于机械、电力和航空等领域。
例如,鲁棒控制技术可以被用于减小机器人的振动、提高飞机的稳定性以及增强工业化生产线的控制能力。
3、军事应用在军事应用方面,鲁棒控制技术可以被用于提高飞机、战车和导弹等武器系统的调节能力。
特别是在战场环境中,控制系统鲁棒性的提高可以增加战斗机器的生存能力。
四、控制系统鲁棒性研究存在的挑战尽管控制系统鲁棒性技术已经取得了重要的进展,但仍然存在一些挑战。
一方面,由于控制系统和实际环境的复杂性,鲁棒控制技术难以实现最优性能。
另一方面,鲁棒性评估技术的建立也面临一些困难,例如如何量化系统鲁棒性和如何进行准确的鲁棒性评估等。
电力系统鲁棒控制策略研究

电力系统鲁棒控制策略研究近年来,电力系统的规模不断扩大,系统的复杂性和不确定性也日益增加。
因此,如何保证电力系统的稳定运行成为了重要的研究方向。
鲁棒控制策略作为一种有效的控制手段,能够应对系统的不确定性和扰动,为电力系统的稳定运行提供了有力的支持。
1. 鲁棒控制策略的基本概念鲁棒控制策略是一种能够在系统存在不确定性和扰动时保证系统稳定性和性能的控制方法。
它通过引入不确定性补偿器或扰动抑制器,能够抵消系统不确定性和扰动对系统稳定性和性能的影响。
鲁棒控制策略不依赖于对系统模型的精确知识,而是通过设计具有鲁棒性能的控制器来应对不确定性和扰动。
2. 鲁棒控制策略的研究方法在电力系统的鲁棒控制策略研究中,常用的方法包括鲁棒控制理论、最优控制理论、自适应控制理论等。
鲁棒控制理论对于系统存在的不确定性进行建模,并设计具有鲁棒性能的控制器;最优控制理论通过优化技术,在系统运行的过程中最大化系统性能;自适应控制理论利用系统的自适应能力,实时调整控制器参数以应对系统的不确定性和扰动。
3. 鲁棒控制策略的应用领域电力系统鲁棒控制策略的应用领域广泛,包括电力传输、变压器控制、发电机控制等。
在电力传输中,鲁棒控制策略能够提高系统的稳定性和可靠性,保证电力传输的高效性和安全性;在变压器控制中,鲁棒控制策略能够实现对变压器的精确控制,提高变压器的运行效率;在发电机控制中,鲁棒控制策略能够保证发电机的稳定性和性能,提高电力系统的供电能力。
4. 鲁棒控制策略的未来发展方向随着电力系统规模的不断扩大和复杂性的增加,电力系统鲁棒控制策略的研究将面临更多的挑战和机遇。
未来的研究方向包括:深度学习在鲁棒控制策略中的应用,以提高系统的自适应能力和鲁棒性能;基于大数据分析的鲁棒控制策略,以实现对系统状态的实时监测和控制;多目标优化在鲁棒控制策略中的应用,以综合考虑系统性能和稳定性等方面的要求。
总结起来,电力系统鲁棒控制策略的研究对于保证系统的稳定运行具有重要的意义。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无源性原理在鲁棒镇定中的应用的报告,800字
无源性原理是经典控制学中的一项重要理论,用于研究系统的动态特性。
它最初是由马歇尔1930年提出的,他认为控制系
统的输入和输出是相互独立的,因此,可以将输入与输出分开考虑。
无源性原理的应用已在很多研究领域得到广泛的使用,尤其是在鲁棒镇定研究中,它被用来将控制系统的输入与输出分开,以便在动态环境中消除不确定性和噪声,有效地提高系统性能。
一般来说,鲁棒镇定是控制系统中的一种技术,它具有保持性能稳定以及抵抗内部和外部的扰动的能力。
这种技术的核心原理是无源性原理,即输入和输出是相互独立的,可以将输入和输出分开考虑。
由此,鲁棒镇定可以通过分离输入和输出建立起一种稳定的状态,以实现对外部噪声和内部噪声的抵抗能力,进而提高系统的性能和稳定性。
无源性原理在鲁棒镇定中的应用可以通过有效地控制系统输入来实现。
首先,在鲁棒镇定中,应用无源性原理,可以减少系统输入的不确定性,而伴随输入的预测也可以有效地消除噪声。
其次,无源性原理可以有效地控制系统的输出,使系统的输出保持稳定。
最后,无源性原理可以用于检测系统内部出现的故障,如系统构建中出现的参数故障或算法差错,并采取相应的措施进行修复。
总之,无源性原理在鲁棒镇定研究中具有重要的意义。
该原理可以将控制系统的输入和输出分开,使系统得以稳定运行,有效地抵抗内部和外部的扰动,从而提高系统的性能。
因此,无
源性原理在控制系统中具有十分重要的地位,应该加以深入的研究和探究。