TK系列应用选型参考手册(phase)
ACT 选型手册
U SINESS ENTERPRISE BRIEF INTRODUCTIONB 企业简介常州安科特电机有限公司是专业设计、生产混合式步进电机、直流无刷电机及配套电机驱动器的高科技企业。
安科特电机始终坚持以人为本,以创新为发展动力,秉承“信誉第一、质量至上”的经营理念,争创市场一流品牌。
安科特电机技术力量雄厚,生产工艺成熟,检验设备齐全。
已获得ISO9001:2008质量管理体系认证及CE认证,产品符合欧盟RoHS标准。
安科特电机团队志存高远,锐意进取,在机遇与挑战面前,安科特电机将不断求索,愿与所有的伙伴一同前行,成就未来,共创伟业!Changzhou ACT Motor Co., Ltd is a high-tech enterprise that specializes in designing and producing hybrid stepper motors, brushless DC motors and motor drivers. ACT Motor always adhere to people-oriented, innovative driving force for development, adhering to the "credibility first, quality first " business philosophy, striving for market-leading brands. ACT Motor has strong technical force, mature production technology, complete testing equipment and has obtained ISO9001: 2008 quality management system certification and CE certification, compliance with the EU RoHS standards. With high aspiration, striving for progress and innvovation, ACT Motor team sincerely works hand in hand with domestic and foreign partners for ourbright future.ACT MOTOR ACT MOTOR 0102ONTENTS 产品目录C CONTENTS 一、 二相,四相混合式步进电机系列(2-PHASE,4-PHASE HYBRID STEPPER MOTOR)(3-PHASE HYBRID STEPPER MOTOR)(5-PHASE HYBRID STEPPER MOTOR)(HYBRID LINEAR STEPPER MOTOR)二、 三相混合式步进电机系列三、 五相混合式步进电机系列四、 直线混合式步进电机系列 1、8HS (20BYGH) 2、11HS (28BYGH) 3、14HS (35BYGH) 4、14HM (35BYGHM) 5、15HS (36BYGH) 6、15HM (36BYGHM) 7、16HS (39BYGH) 8、16HM (39BYGHM) 9、17HS (42BYGH)10、17HM (42BYGHM)11、23HS (57BYGH)12、23HM (57BYGHM)13、23HY (57BYG)14、24HS (60BYGH)15、34HS (86BYGH)16、34HM (86BYGHM)17、34HY (86BYG)18、34HD (86BYX)19、42HS (110BYGH) 1、23HT 2、34HT 1、16HSL (39BYGL) 2、17HSL (42BYGHL) 3、23HSL (57BYHL) 4、24HSL (60BYGHL) 1、34HF 091011121313141516171819 20 21 22 23 24 25 26 27 28 30 31 32 33 2903040506五、 混合式减速箱步进电机系列六、 刹车步进电机系列(HYBRID GEARBOX STEPPER MOTOR)(BRAKE HYBRID STEPPER MOTOR)偏心减速箱系列(ECCENTRIC GEARBOX STEPPER MOTOR)行星减速箱系列(PLANETARY GEARBOX STEPPER MOTOR)1、23HS2、34HS 1、17HS 2、23HS3、34HS4、42HS 1、11HS 2、17HS 3、23HS 343536373839404142(BRUSHLESS DC MOTOR)(HYBRID STEPPER MOTOR DRIVERS)(SHAFT MODEL)(LEAD WIRE MODEL)(BRUSHLESS DC MOTOR DRIVER)七、 直流无刷电机系列 1、42BLF 2、57BLF 3、57BL 4、86BLF 43-44 45-46 47-48 49-50八、 单双极选择与接线方式(SELECT UNIPOLAR AND BIPOLAR , WIRE CONNECTION DIAGRAMS) 51混合式步进电机驱动器直流无刷电机驱动器九、 驱动器系列 1、BLDC-8015 1、DM420 2、DM542 3、DM860 4、DM2722 52 53 54 55 56十、 出轴方式 十一、接线方式57 5808机身长28mm33mm40mm 型号8HS2XXX 8HS3XXX 8HS4XXX M 机身说明otor Length* 以上仅为代表性产品,派生产品可根据客户要求制作。
TKKL-4实验指导书(新版学生用)
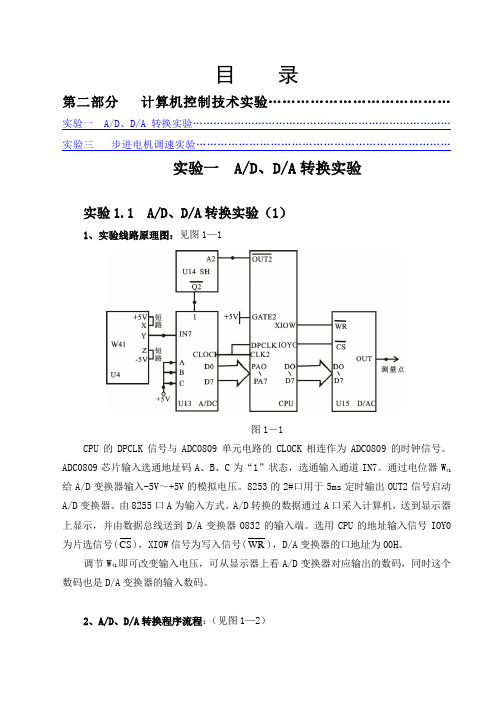
目录第二部分计算机控制技术实验…………………………………实验一 A/D、D/A转换实验…………………………………………………………………实验三步进电机调速实验………………………………………………………………实验一 A/D、D/A转换实验实验1.1 A/D、D/A转换实验(1)1、实验线路原理图:见图1—1图1-1CPU的DPCLK信号与ADC0809单元电路的CLOCK相连作为ADC0809的时钟信号。
ADC0809芯片输入选通地址码A、B、C为“1”状态,选通输入通道IN7。
通过电位器W41给A/D变换器输入-5V~+5V的模拟电压。
8253的2#口用于5ms定时输出OUT2信号启动A/D变换器。
由8255口A为输入方式。
A/D转换的数据通过A口采入计算机,送到显示器上显示,并由数据总线送到D/A变换器0832的输入端。
选用CPU的地址输入信号IOY0为片选信号(CS),XIOW信号为写入信号(WR),D/A变换器的口地址为00H。
调节W41即可改变输入电压,可从显示器上看A/D变换器对应输出的数码,同时这个数码也是D/A变换器的输入数码。
2、A/D、D/A转换程序流程:(见图1—2)图1-23、实验内容及步骤(1)按图1—1接线。
用“短路块”分别将U1单元中的ST与+5V短接;U4单元中的X 与+5V,Z与-5V短接。
其它画“●”的线需自行连接。
连接好后,接通电源,然后按使用说明中对U15 D/A转换单元进行调零。
(2)将W41输出调至-5V,执行监控中的程序(G=F000:1100↘)。
如果程序正确执行,将在显示器上显示“00”。
(3)将W41依次调节,用U16交/直流数字电压表分别检测A/D的输入电压和D/A的输1。
4、按图1—3改接U4输出Y至U13A/D转换单元输入IN7的连接,其它线路同图1—1图1-35、用U16交/直流数字电压表监测A/D的输入电压,在OV附近连续调节A/D的输入电压,观察整理化误差和量化单位。
选型手册V20130217

立足本土,作国内最杰出最用心的MCU设计公司GPIO 通用型MCU芯片型号可编程只读存储器随机存储器EEPROM工作电压(伏)内部振荡器(赫兹)外部振荡器(赫兹)系统时钟I/O端口+Input脉宽调制中断源定时器工作电流待机电流看门狗定时器低电压复位工作温度封装型式其他Part Number ROM RAM EEPROMVoltage(V)InternalOscillator(HZ)ExternalOscillator(HZ)Fsys I/O +IN PWMInterruptSourceTimerOperatingCurrentIdleCurrentWDT LVROperatingTemp.PKG Type OtherMC20P011Kx8Bit64×8Bit/ 2.0~5.52M/4M/8M±2%400K~8M2T11/5+11CH8Bit62/8Bit3mA/4M<1uA yes2.1V3.6V-40~85℃DIP/SOP14/8与义隆153S和松翰8P2501B脚位兼容。
具有硬件Buzzer输出端口MC20E011Kx8Bit64×8Bit 256x8Bit2.0~5.52M/4M/8M±2%400K~8M2T11/5+11CH8Bit62/8Bit3mA/4M<1uA yes2.1V3.6V-40~85℃DIP/SOP16/8用MCP技术把一颗EEPROM(24C02)封装进去,E2ROM是串行通讯,占去2个IO口MC20P02B2Kx8Bit64×8Bit/ 2.0~5.52M/4M/8M±2%400K~8M2T17/15/13/11/5+1/51/8Bit3mA/4M<1uA yes2.1V3.6V-40~85℃DIP/SOP20/18/16/14/818pin与中颖69P20C,松翰8P2612,义隆78P156脚位兼容20pin与松翰8P2613脚位兼容MC20E02B2Kx8Bit64×8Bit 256x8Bit2.0~5.52M/4M/8M±2%400K~8M2T11/9+1/51/8Bit3mA/4M<1uA yes2.1V3.6V-40~85℃DIP/SOP 16用MCP技术把一颗EEPROM(24C02)封装进去,E2ROM是串行通讯,占去2个IO口MC20P044K×8Bit128×8Bit/ 2.0~5.52M/4M/8M±2%400K~8M2T17/15/13+1/51/8Bit3mA/4M<1uA yes2.1V3.6V-40~85℃DIP/SOP20/18/1618pin与中颖69P20C,松翰8P2612,义隆78P156脚位兼容20pin与松翰8P2613脚位兼容具有2路比较器(可软件修调偏置)MC20P8011Kx8Bit64×8Bit/ 2.0~5.51M/2M/4M/8M±2%/2T5/3+11CH8Bit42/8Bit3mA/4M<1uA yes2.1V3.6V-40~85℃DIP/SOP8SOT23-6TSSOP8VPP可作输入/开漏输出SOT23-6封装可直接烧写MC30P011Kx14Bit48×8Bit/ 2.0~5.51M/2M/4M/8M/455K±1.5%32K500~20M2T4T11/5/3+11CH8Bit42/8Bit1mA/4M<1uA yes1.5V3.6V7级可选-40~85℃DIP/SOP14/8管脚和程序全面兼容AM8EB153XFM8PS53,EM78P153,仅管脚和兼容SN8P2501B☆MC30P022Kx16Bit64×8Bit/ 2.0~5.51M/2M/4M/8M/455K±1.5%32K500~20M2T4T17/15/13+1243/8Bit1mA/4M<1uA yes1.5V3.6V7级可选40~85℃DIP/SOP20/18/1618pin与中颖69P20C,松翰8P2612,义隆78P156脚位兼容20pin与松翰8P2613脚位兼容具有2路比较器(可软件修调偏置)*拥有更佳的RAM掉电保持功能:只要芯片的VDD和GND之间电压维持在0.7V以上时,RAM数据就可以一直保持,正常情况下断电后依靠外挂电容即可以保持RAM数据24小时以上。
TK-E系列热过载继电器说明书

Company Info.PLCs Field I/O Software C-more & other HMI AC Drives AC Motors Power Transmiss.Steppers/Servos Motor Controls Proximity Sensors Photo Sensors Limit SwitchesEncoders Current Sensors Pressure Sensors Temp.Sensors Pushbuttons/Lights Process Relays/TimersComm.Terminal Blocks & Wiring PowerCircuit Protection Enclosures Tools AppendixPart IndexTK-E02-900TK-E6-6500TK-E2-800TK-E3-5000TK-E5-3600Fuji Duo Series Contactor and Overload Relay Selection T ablesSC-E ContactorTK-E Overload Relay+=Step 1. Select a SC-E contactor from Column A based on motor voltage,and horsepower.Step 2. Select a TK-E overload relay from Column B to work with the SC-Econtactor selected in Step 1. The motor full load current (FLA)should be within the adjustable current range of the overload relay.100-240V Single Phase Motor (1/3 to 25 hp)Step 1. Select a contactor from page 17–5based on motor voltage and horsepower. Step 2. Select an overload relay from page 17–21based on motor full load current.Motor voltage Motor full-load rated amperage (FLA)Check the data plate on the motor for the hp, volts and full-rated amps.ABThree Phase Motors - Refer to tables on following pageCompany Info.PLCs Field I/O Software C-more & other HMI AC Drives AC Motors Power Transmiss.Steppers/Servos Motor Controls Proximity Sensors Photo Sensors Limit Switches Encoders Current Sensors Pressure Sensors Temp.Sensors Pushbuttons/Lights Process Relays/Timers Comm.Terminal Blocks & Wiring Power Circuit Protection Enclosures Tools Appendix Part IndexFuji Duo Series Overload Relay Selection T ablesFuji Duo Series TK-E Overload RelaysCompany Info.PLCs Field I/O Software C-more & other HMI AC Drives AC Motors Power Transmiss.Steppers/Servos Motor Controls Proximity Sensors Photo Sensors Limit SwitchesEncodersCurrent Sensors Pressure Sensors Temp.Sensors Pushbuttons/Lights ProcessRelays/TimersComm.Terminal Blocks & Wiring Power Circuit Protection Enclosures ToolsAppendix Part IndexFuji Duo Series TK-E Overload RelaysWiringBe sure to wire the relays correctly using the wiring diagrams on the supplied instal-lation sheets. Main terminals for models TK-E02-xxx to TK-E6-xxx are wired using solid wires or stranded wires. Stranded wires or flexible stranded wires can be connected by twisting them together and crimping a sleeve (ferrule) onto them before connecting.Tightening torqueIf wires are not tightened sufficiently, they may become hot or loosen and result in a fire, short-circuit, electric shock, or some other potentially dangerous situation. Be sure to tighten the wires to the torques specified in these tables.Fuji Duo Series TK-E Overload RelaysSZ-HCE56083SZ-HDE9054SZ-HCESZ-HDESZ-HEESZ-HCE Base UnitTK-E02-145 Thermal Overload RelayInstall thermal overload relay onto base unit as shown. Relay can now be installed onto DIN rail or panel.Company Info.PLCsField I/O SoftwareC-more & other HMIAC DrivesAC MotorsPower Transmiss.Steppers/ ServosMotor ControlsProximity SensorsPhoto SensorsLimit SwitchesEncodersCurrent SensorsPressure SensorsTemp. SensorsPushbuttons/ LightsProcessRelays/ TimersComm.Terminal Blocks & WiringPowerCircuit ProtectionEnclosuresToolsAppendixPart Index。
Kinetis全系列选型手册-14

SPI
I2C
I2S
CA
线
口 接口 T
N
USB QTG(1)
2 41
2 51
2 51
2 41
2 51
2 51
18/16/2
3 5211
20/16/4
4 5211
32/32/6
5 6211
18/16/2
3 5211
20/16/4
4 5211
21/16/5
5 6211
32/32/6
5 6211
18/16/2
4 521
FS
5 6 3 1 1 FS
6 6 3 1 1 FS
32/32/6 8位 32/32/6 8位 32/32/6 8位
6 6 3 1 1 FS 5 6 3 1 1 FS 6 6 3 1 1 FS
32/32/6 8位
6 6 3 1 1 FS
以太网
定时器
模拟 能
电机控 带正 AD ADC ADC
22√
66
32/32/6
4 621
FS¢
2*8 2*2 2 4 38
22√
81
18/16/2
3 5 3 1 1 FS
2*8 2*2 2 2 22
13√
40(38)
20/16/2 4位
4 5 3 1 1 FS
2*8 2*2 2 3 27
13√
52(52)
21/16/5 4位
5 6 3 1 1 FS
2*8 2*2 2 5 33
USB QTG(1)
FS¢ FS¢ FS¢ FS¢ FS¢ FS¢ FS¢ FS¢
以太网
定时器
模拟 能
TK-80简要说明
TK-80简要说明简要说明:发射频率:1.8---29.9999MHZ接收频率:0.5---29.9999MHZ接收电流:1.45A,发射电流:20.5A以下天线阻抗50欧1.电源开关POWER得按3秒。
2.AT TUNE为天调呼出键。
3.SCAN为扫描键。
4.MENU为菜单键。
5.MODE为模式键。
6.DATA为数据传输键。
7.SQUELCH为静噪调节旋钮。
8.VOLUME为音量。
9.CLARIFIER为精调旋钮。
频率预置:1.右手同时按住MENU和MODE,左手开电源,此时显示"DERLER"字样。
2.旋转大旋钮,显示"NULL"及闪烁的"01"。
3.按DATA,显示闪烁的"RX"(接收)及7个"0",其中第一个"0"闪烁。
4.用大旋钮置数,之后,用SCAN下一个"0"闪烁,再置数,依次按SCAN,至使最后一个数字闪烁。
5.按DATA"TX"(发射)闪烁,同法置发射频率。
6.按DATA一次,用大旋钮置工作方式:USB、LSB、AM、CW。
7.按DATA二次,旋大旋钮置功率档次:L为25W,M为50W,H为100W。
8.再按DATA一次"01"闪烁,用大旋钮使"01"变成"02",同法置第二个频率。
9.依次进行下去,总共可置80个频率,收发频率可以同频,也可以异频。
10.关机,再开机,可以使用了。
选用户菜单1.开机,按MENU,此时显示用户菜单。
2.按DATA一次,出现"01",用大旋钮置HIGH。
3.按DATA一次,使"01"变成"02",用大旋钮置NBON。
依次进行下去,选用菜单里的内容。
4.再按MENU一次,显示回到正常显示状态。
kintex 7系列产品选型手册
XC7A12T 12,800 2,000 16,000 171 20 720 3 150 72 40 1 1 1 2 -1, -2 -2L, -3 -1, -2, -1L
XC7A15T 16,640 2,600 20,800 200 25 900 5 250 120 45 1 1 1 4 -1, -2 -2L, -3 -1, -2, -1L 106 (2)
Page 2
Artix-7 FPGAs
Transceiver Optimization at the Lowest Cost and Highest DSP Bandwidth (1.0V, 0.95V, 0.9V)
Logic Resources Memory Resources Clock Resources I/O Resources
Page 3
Supports PCI Express Base 2.1 specification at Gen1 and Gen2 data rates. Represents the maximum number of transceivers available. Note that the majority of devices are available without transceivers. See the Package section of this table for details. Leaded package option available for all packages. See DS180, 7 Series FPGAs Overview package details. Device migration is available within the Artix-7 family for like packages but is not supported between other 7 series families. Devices in FGG484 and FBG484 are footprint compatible. Devices in FGG676 and FBG676 are footprint compatible.
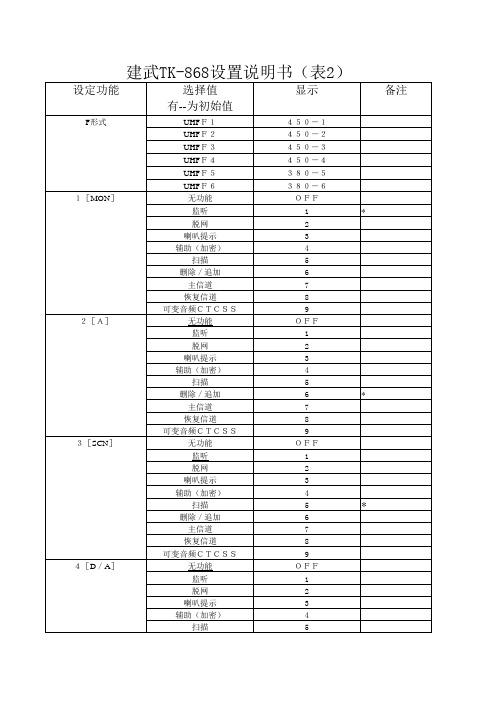
建武tk-868设置说明书(表2)
26电话密码 27发射保持时间 28输入-发出 29D键空码 30DTMF信令 31中间号码 32组呼"王码“ 33静噪关闭延迟
有效 无效 有效 无效 有效 无效 D音频 1-16s/1s 编码静噪 信息传呼 0-9,A-D,*,# OFF,A-D,*,# OFF 1-15s/1s 初始值10s
34被呼提示 自动应答
备注
1[MON]
无功能 监听 脱网 喇叭提示 辅助(加密) 扫描 删除/追加 主信道 恢复信道 可变音频CTCSS 无功能 监听 脱网 喇叭提示 辅助(加密) 扫描 删除/追加 主信道 恢复信道 可变音频CTCSS 无功能 监听 脱网 喇叭提示 辅助(加密) 扫描 删除/追加 主信道 恢复信道 可变音频CTCSS 无功能 监听 脱网 喇叭提示 辅助(加密) 扫描
2[A]
*
3[SCN]
*
4[D/A]
4[D/A]
删除/追加 主信道 恢复信道 可变音频CTCSS 0-31/步进值1 初始值12 有效 无效 OFF 30-300s/步进30 初始值180 OR AND CH1-CH32 初始值CH1 有效 无效 有效 无效 CO TO 无 固定 可选择 CH1-CH32 初始值CH1 0.5-5.0s/ 0.1s 初始值0.5
6 7 8 9 5-1 6-ON 6-OFF 7-OFF 7-180 8-or 8-and 9-1 10-ON 10-OFF 11-ON 11-OFF 12-CO 12-TO 13-OFF 13-1 13-2 14-1 15-0.5
*
5最小音量 6嘟嘟音 7发射定时器
8信令控制逻辑 9主信道 10经销商/调试模式 11复制 12时间控制扫描 载波控制扫描 13优先扫描
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
T K永磁同步力矩电机应用选型参考手册索引TK电机选型说明 (2)TK电机参数、尺寸 (3)TK电机应用技术说明 (25)TK电机选型说明TK □□ - □□ - □□定子外部直径定子长度力矩常数举例说明:TK 85 – 50 - 01定子外部直径:85 mm定子长度: 50 mm力矩常数:1 Nm/ArmsTK 85Technical Data Summary TK 85Extremely thin ring motor-only20.5mm radialApplications:Small spindles,wrist joints,laser cuttinglimited flux controllabilitySymbol TK85-50-01TK85-100-01TK85-140-01Units Reference data (winding independent)Nominal torque,S1,0speed,conduction+convection cooled IC4181)Tnc2,806,409,90Nmrms Nominal torque,S1,0speed,water cooled2)Tnw5,1512,0019,00Nmrms Peak torque,S610%1)Tpk7,9718,2128,18Nmrms Maximum torque3)Tul193853Nm Maximum structural speed Pn200020002000rad/sec Critical flux control torque4)Pf224564NmMotor constant Tw0,590,971,23Nm/sqrt(W) Pole number PN101010Connection Y Y YPhysical data (winding independent)Rotor inertia Jm0,3000,6000,840mkgm2 Acceleration at maximum torque apk265633035833543rad/s2 Outer diameter Dout858585mmRotor hole diameter Din444444mmOverall stator length Stkout82132172mmStack length Stk50100140mmStator mass Msta0,931,712,4kgRotor mass Mrot0,380,761,06kg Insulation Class H-F Class H-F Class H-FProtection IP00IP00IP00Thermal data (winding independent)Thermal imp.assumed for cond.Cooling1)Rthc0,7670,5000,360K/W Thermal impedance,motor to cooling frame2)Rthw0,2500,1200,086K/W Thermal capacity Cth391718 1.008J/K Thermal time constant cond cooling1)Tc300359363sec Thermal time constant,water cooled2)Tw988687secLoss at Tnc L0c87174260WLoss at Tnw L0w290578977WCoolant flow,5C temp rise,35C inlet Cfl0,81,72,8lit/min Treshold of built-in PTC PTCt130130130oCElectrical data (winding dependent)Nominal speed(knee speed)5)wn628628628rad/sec Nominal power,water cooling,knee speed6)Pnw3,27,312kWBack E.M.F.between phases Ke0,580,580,58VsTorque constant Kt1,001,001,00Nm/Arms Temp.coeff.of E.M.F.and Kt dKe/dT-0,09-0,09-0,09%/oC Winding resistance,20oC Rw4,401,601,00Ohm Winding inductance Lw6,003,002,10mH Nominal current,zero speed1)In02,796,379,85Arms Nominal current,zero speed,2)In5,4012,5719,91Arms Maximum current3)Ipk23,6447,2866,20Arms Frequency fn500500500Hz Efficiency at rated power6)n0,920,930,92Definitions:1)Motor assembled in light alloy case with outer surface=500%of motor2)Water cooled motor,water inlet temperature=35C,copper temp,120C,3)Torque at which magnetic saturation prevents further overloading with any4)Knee torque corresponding to unlimited constant power operation5)Limit of constant torque operation with400Vac supplyTK 106Technical Data Summary TK 106Medium power medium tube motorsApplications:Direct drive lathesMultiaxis jointsSpeed up to10000rpm,50-500NmNo flux controlSymbol TK106-45-01TK106-90TK106-180-Units Reference data (winding independent)Nominal torque,S1,0speed,conduction+convection cooled IC4181)Tnc3,68,516,6Nmrms Nominal torque,S1,0speed,water cooled2)Tnw6,816,033,0Nmrms Peak torque,S610%1)Tpk102447Nmrms Maximum torque3)Tul3265110Nm Maximum structural speed Pn100010001000rad/sec Critical flux control torque4)Pf3470141NmMotor constant Tw0,911,492,18Nm/sqrt(W) Pole number PN121212Connection Y Y YPhysical data (winding independent)Rotor inertia Jm0,801,452,7mkgm2 Acceleration at maximum torque apk128071668417498rad/s2 Outer diameter Dout106106106mmRotor hole diameter Din656565mmOverall stator length Stkout83128218mmStack length Stk4590180mmStator mass Msta1,42,34,3kgRotor mass Mrot0,512kg Insulation Class H-F Class H-F Class H-FProtection IP00IP00IP00Thermal data (winding independent)Thermal imp.assumed for cond.Cooling1)Rthc0,8900,4470,250K/W Thermal impedance,motor to cooling frame2)Rthw0,2280,1100,057K/W Thermal capacity Cth588966 1.806J/K Thermal time constant cond cooling1)Tc523432452sec Thermal time constant,water cooled2)Tw134106103secLoss at Tnc L0c55111198WLoss at Tnw L0w197394789WCoolant flow,5C temp rise,35C inlet Cfl0,61,12,3lit/min Treshold of built-in PTC PTCt130130130oCElectrical data (winding dependent)Nominal speed(knee speed)5)wn538,57537,39537,15rad/sec Nominal power,water cooling,knee speed6)Pnw3,668,6017,73kWBack E.M.F.between phases Ke0,650,650,65VsTorque constant Kt1,131,131,13Nm/Arms Temp.coeff.of E.M.F.and Kt dKe/dT-0,09-0,09-0,09%/oC Winding resistance,20oC Rw2,300,860,40Ohm Winding inductance Lw4,102,001,00mH Nominal current,zero speed1)In03,207,5514,74Arms Nominal current,zero speed,2)In6,3614,9630,85Arms Maximum current3)Ipk35,5372,17122,13Arms Frequency fn515513513Hz Efficiency at rated power6)n0,950,960,96Definitions:1)Motor assembled in light alloy case with outer surface=500%of motor2)Water cooled motor,water inlet temperature=35C,copper temp,120C,3)Torque at which magnetic saturation prevents further overloading with any4)Knee torque corresponding to unlimited constant power operation5)Limit of constant torque operation with400Vac supplyTK 164Technical Data Summary TK 164High power medium speed spindle motorsApplications:Direct drive lathesSwiss type lathesSpeed up to5000rpm,40-200NmShort duty constant powerSymbol TK164-60-04TK164-110-03TK164-250-09Units Reference data (winding independent)Nominal torque,S1,0speed,conduction+convection cooled IC4181)Tnc1940106Nmrms Nominal torque,S1,0speed,water cooled2)Tnw3780209Nmrms Peak torque,S610%1)Tpk54114302Nmrms Maximum torque3)Tul93171389Nm Maximum structural speed Pn500500500rad/sec Critical flux control torque4)Pf86157366NmMotor constant Tw2,333,636,31Nm/sqrt(W) Pole number PN121212Connection Y Y YPhysical data (winding independent)Rotor inertia Jm4,307,3016mkgm2 Acceleration at maximum torque apk125761559518855rad/s2 Outer diameter Dout164164164mmRotor hole diameter Din969696mmOverall stator length Stkout102152292mmStack length Stk60110250mmStator mass Msta4,8817kgRotor mass Mrot1,32,45,5kg Insulation Class H-F Class H-F Class H-FProtection IP00IP00IP00Thermal data (winding independent)Thermal imp.assumed for cond.Cooling1)Rthc0,3900,2140,093K/W Thermal impedance,motor to cooling frame2)Rthw0,0920,0500,021K/W Thermal capacity Cth 2.016 3.3607.140J/K Thermal time constant cond cooling1)Tc786719664sec Thermal time constant,water cooled2)Tw185168150secLoss at Tnc L0c267491 1.120WLoss at Tnw L0w 1.030 1.880 4.380WCoolant flow,5C temp rise,35C inlet Cfl3,05,412,6lit/min Treshold of built-in PTC PTCt130130130oCElectrical data (winding dependent)Nominal speed(knee speed)5)wn173,29173,9952,40rad/sec Nominal power,water cooling,knee speed6)Pnw6,4113,9210,95kWBack E.M.F.between phases Ke1,801,765,13VsTorque constant Kt3,133,058,89Nm/Arms Temp.coeff.of E.M.F.and Kt dKe/dT-0,09-0,09-0,09%/oC Winding resistance,20oC Rw2,691,062,98Ohm Winding inductance Lw12,636,5824,00mH Nominal current,zero speed1)In06,0813,1211,92Arms Nominal current,zero speed,2)In12,4627,6224,74Arms Maximum current3)Ipk37,1970,1254,69Arms Frequency fn16616650Hz Efficiency at rated power6)n0,860,880,71Definitions:1)Motor assembled in light alloy case with outer surface=500%of2)Water cooled motor,water inlet temperature=35C,copper temp,1203)Torque at which magnetic saturation prevents further overloading4)Knee torque corresponding to unlimited constant power operation5)Limit of constant torque operation with400Vac supplyHigh power-speed spindle motorsApplications:High speed machining centresSpeed up to25,000rpm,30-100kWWater cooled constant power controllabilitySymbol TK170-60-0.6TK170-112-0.6Units Reference data (winding independent)Nominal torque,S1,0speed,conduction+convection cooled IC4181)Tnc1426Nmrms Nominal torque,S1,0speed,water cooled2)Tnw3263Nmrms Peak torque,S610%1)Tpk4074Nmrms Maximum torque3)Tul78117Nm Maximum structural speed Pn30003000rad/sec Critical flux control torque4)Pf67118NmMotor constant Tw1,742,70Nm/sqrt(W) Pole number PN44Connection Y YPhysical data (winding independent)Rotor inertia Jm58mkgm2 Acceleration at maximum torque apk76629135rad/s2 Outer diameter Dout170170mmRotor hole diameter Din6565mmOverall stator length Stkout145197mmStack length Stk60112mmStator mass Msta9,513,5kgRotor mass Mrot2,43,9kg Insulation Class H-F Class H-FProtection IP00IP00Thermal data (winding independent)Thermal imp.assumed for cond.Cooling1)Rthc0,3800,250K/W Thermal impedance,motor to cooling frame2)Rthw0,0670,040K/W Thermal capacity Cth 3.990 5.670J/K Thermal time constant cond cooling1)Tc 1.516 1.418sec Thermal time constant,water cooled2)Tw267227secLoss at Tnc L0c248378WLoss at Tnw L0w 1.250 2.096WCoolant flow,5C temp rise,35C inlet Cfl7,212,0lit/min Treshold of built-in PTC PTCt130130oCElectrical data (winding dependent)Nominal speed(knee speed)5)wn860842rad/sec Nominal power,water cooling,knee speed6)Pnw27,5253,05kWBack E.M.F.between phases Ke0,380,38VsTorque constant Kt0,650,65Nm/Arms Temp.coeff.of E.M.F.and Kt dKe/dT-0,09-0,09%/oC Winding resistance,20oC Rw0,210,09Ohm Winding inductance Lw2,101,20mH Nominal current,zero speed1)In021,5039,92Arms Nominal current,zero speed,2)In51,72101,83Arms Maximum current3)Ipk149,71224,57Arms Frequency fn274268Hz Efficiency at rated power6)n0,960,96Definitions:1)Motor assembled in light alloy case with outer surface=500%of motor2)Water cooled motor,water inlet temperature=35C,copper temp,120C,3)Torque at which magnetic saturation prevents further overloading with any4)Knee torque corresponding to unlimited constant power operation5)Limit of constant torque operation with400Vac supplyHigh power medium speed spindle motorsApplications:Direct drive lathesLarge milling spindlesSpeed up to5000rpm,50-500NmWater cooled constant power controllabilitySymbol TK240-60-04TK240-140-04TK240-240-04Units Reference data (winding independent)Nominal torque,S1,0speed,conduction+convection cooled IC4181)Tnc4196202Nmrms Nominal torque,S1,0speed,water cooled2)Tnw96226477Nmrms Peak torque,S610%1)Tpk117273575Nmrms Maximum torque3)Tul252505865Nm Maximum structural speed Pn100010001000rad/sec Critical flux control torque4)Pf172343573NmMotor constant Tw4,747,8610,97Nm/sqrt(W) Pole number PN161616Connection Y Y YPhysical data (winding independent)Rotor inertia Jm203760mkgm2 Acceleration at maximum torque apk583473849582rad/s2 Outer diameter Dout240240240mmRotor hole diameter Din150150150mmOverall stator length Stkout108178278mmStack length Stk70140240mmStator mass Msta122133kgRotor mass Mrot2,75,28,5kg Insulation Class H-F Class H-F Class H-FProtection IP00IP00IP00Thermal data (winding independent)Thermal imp.assumed for cond.Cooling1)Rthc0,2200,1130,067K/W Thermal impedance,motor to cooling frame2)Rthw0,0380,0190,011K/W Thermal capacity Cth 5.0408.82013.860J/K Thermal time constant cond cooling1)Tc 1.109997929sec Thermal time constant,water cooled2)Tw194168152secLoss at Tnc L0c290583 1.327WLoss at Tnw L0w 1.398 2.800 3.740WCoolant flow,5C temp rise,35C inlet Cfl4,08,010,7lit/min Treshold of built-in PTC PTCt130130130oCElectrical data (winding dependent)Nominal speed(knee speed)5)wn118,52113,80104,44rad/sec Nominal power,water cooling,knee speed6)Pnw11,3825,7249,82kWBack E.M.F.between phases Ke2,532,542,53VsTorque constant Kt4,384,404,39Nm/Arms Temp.coeff.of E.M.F.and Kt dKe/dT-0,09-0,09-0,09%/oC Winding resistance,20oC Rw1,280,470,24Ohm Winding inductance Lw9,304,702,80mH Nominal current,zero speed1)In09,3621,8246,04Arms Nominal current,zero speed,2)In23,0654,07114,45Arms Maximum current3)Ipk71,88143,49246,45Arms Frequency fn151145133Hz Efficiency at rated power6)n0,890,900,93Definitions:1)Motor assembled in light alloy case with outer surface=500%of motor2)Water cooled motor,water inlet temperature=35C,copper temp,1203)Torque at which magnetic saturation prevents further overloading with4)Knee torque corresponding to unlimited constant power operation5)Limit of constant torque operation with400Vac supplyTK 270Technical Data Summary TK 270Highpeak torque ring motorApplications:Direct drive rotary tablesIndexers for transfersWater cooled constant power controllabilitySymbol TK270-40-07TK270-80-08TK270-120-12Units Reference data (winding independent)Nominal torque,S1,0speed,conduction+convection cooled IC4181)Tnc43107170Nmrms Nominal torque,S1,0speed,water cooled2)Tnw95254382Nmrms Peak torque,S610%1)Tpk122305484Nmrms Maximum torque3)Tul188376565Nm Maximum structural speed Pn400200200rad/sec Critical flux control torque4)Pf142297427NmMotor constant Tw5,289,3512,01Nm/sqrt(W) Pole number PN242424Connection Y Y YPhysical data (winding independent)Rotor inertia Jm213853mkgm2 Acceleration at maximum torque apk582880149129rad/s2 Outer diameter Dout270270270mmRotor hole diameter Din180180180mmOverall stator length Stkout78118158mmStack length Stk4080120mmStator mass Msta8,816,322,8kgRotor mass Mrot1,93,65,2kg Insulation Class H-F Class H-F Class H-FProtection IP00IP00IP00Thermal data (winding independent)Thermal imp.assumed for cond.Cooling1)Rthc0,3600,1780,119K/W Thermal impedance,motor to cooling frame2)Rthw0,0660,0310,021K/W Thermal capacity Cth 3.696 6.8469.576J/K Thermal time constant cond cooling1)Tc 1.331 1.219 1.140sec Thermal time constant,water cooled2)Tw244212201secLoss at Tnc L0c246496740WLoss at Tnw L0w 1.200 2.570 3.740WCoolant flow,5C temp rise,35C inlet Cfl3,47,410,7lit/min Treshold of built-in PTC PTCt130130130oC Electrical data (winding dependent)Nominal speed(knee speed)5)wn66,3851,9334,17rad/sec Nominal power,water cooling,knee speed6)Pnw6,3113,1913,05kWBack E.M.F.between phases Ke4,214,927,16VsTorque constant Kt7,298,5312,40Nm/Arms Temp.coeff.of E.M.F.and Kt dKe/dT-0,09-0,09-0,09%/oC Winding resistance,20oC Rw2,871,251,60Ohm Winding inductance Lw20,7613,6120,00mH Nominal current,zero speed1)In05,8912,5513,71Arms Nominal current,zero speed,2)In13,7131,3632,42Arms Maximum current3)Ipk32,2155,1356,95Arms Frequency fn1279965Hz Efficiency at rated power6)n0,840,840,78 Definitions:1)Motor assembled in light alloy case with outer surface=500%of motor2)Water cooled motor,water inlet temperature=35C,copper temp,120C,3)Torque at which magnetic saturation prevents further overloading with any4)Knee torque corresponding to unlimited constant power operation5)Limit of constant torque operation with400Vac supplyTK 370Technical Data Summary TK 370Highpeak torque ring motorApplications:Direct drive rotary tablesIndexers for transfersWater cooled constant power controllabilitySymbol TK370-70-25TK370-140-35TK370-210-45Units Reference data (winding independent)Nominal torque,S1,0speed,conduction+convection cooled IC4181)Tnc195384673Nmrms Nominal torque,S1,0speed,water cooled2)Tnw5078611600Nmrms Peak torque,S610%1)Tpk55510931915Nmrms Maximum torque3)Tul69213842076Nm Maximum structural speed Pn200200200rad/sec Critical flux control torque4)Pf5389161621NmMotor constant Tw14,6420,7329,43Nm/sqrt(W) Pole number PN404040Connection Y Y YPhysical data (winding independent)Rotor inertia Jm111186311mkgm2 Acceleration at maximum torque apk500058766159rad/s2 Outer diameter Dout370370370mmRotor hole diameter Din280280280mmOverall stator length Stkout108178248mmStack length Stk70140210mmStator mass Msta203357kgRotor mass Mrot51015kg Insulation Class H-F Class H-F Class H-FProtection IP00IP00IP00Thermal data (winding independent)Thermal imp.assumed for cond.Cooling1)Rthc0,1400,0610,048K/W Thermal impedance,motor to cooling frame2)Rthw0,0170,0130,008K/W Thermal capacity Cth8.40013.86023.940J/K Thermal time constant cond cooling1)Tc 1.176845 1.149sec Thermal time constant,water cooled2)Tw143180192secLoss at Tnc L0c669 1.256 1.933WLoss at Tnw L0w 4.800 6.30010.975WCoolant flow,5C temp rise,35C inlet Cfl13,818,131,5lit/min Treshold of built-in PTC PTCt130130130oC Electrical data (winding dependent)Nominal speed(knee speed)5)wn14,6510,477,37rad/sec Nominal power,water cooling,knee speed6)Pnw7,439,0211,79kWBack E.M.F.between phases Ke14,8520,1026,40VsTorque constant Kt25,7234,8145,73Nm/Arms Temp.coeff.of E.M.F.and Kt dKe/dT-0,09-0,09-0,09%/oC Winding resistance,20oC Rw4,634,233,62Ohm Winding inductance Lw40,9644,1043,00mH Nominal current,zero speed1)In07,5811,0314,72Arms Nominal current,zero speed,2)In20,7526,0336,83Arms Maximum current3)Ipk33,6349,6956,75Arms Frequency fn473323Hz Efficiency at rated power6)n0,610,590,52 Definitions:1)Motor assembled in light alloy case with outer surface=500%of motor2)Water cooled motor,water inlet temperature=35C,copper temp,120C,3)Torque at which magnetic saturation prevents further overloading with any4)Knee torque corresponding to unlimited constant power operation5)Limit of constant torque operation with400Vac supplyTK 450Technical Data Summary TK 450Highpeak torque ring motor with spindle driveApplications:Direct drive rotary tablesIndexers for transfersWater cooled constant power controllabilitySymbol TK 450-60-40TK 450-120-40TK 450-240-40Units Reference data (winding independent)Nominal torque, S1,0 speed, conduction+convection cooledIC 418 1)Tnc2325301152Nmrms Nominal torque, S1, 0 speed, water cooled 2)Tnw58514073057Nmrms Peak torque, S6 10% 1)Tpk66015083279Nmrms Maximum torque 3)Tul100420084016Nm Maximum structural speed Pn200200200rad/sec Critical flux control torque 4)Pf61812272465NmMotor constant Tw12,6720,3731,37Nm/sqrt(W) Pole number PN484848 Connection Y Y YPhysical data (winding independent)Rotor inertia Jm170309586mkgm2 Acceleration at maximum torque apk388448825595rad/s2 Outer diameter Dout450450450mmRotor hole diameter Din340340340mm Overall stator length Stkout98158278mmStack length Stk60120240mm Stator mass Msta18,24889kgRotor mass Mrot5,2510,521kg Insulation Class H - F Class H - F Class H - F Protection IP 00IP 00IP 00Thermal data (winding independent)Thermal imp. assumed for cond. Cooling 1)Rthc0,1380,0610,036K/W Thermal impedance, motor to cooling frame 2)Rthw0,0190,0100,005K/W Thermal capacity Cth7.64420.16037.380J/K Thermal time constant cond cooling 1)Tc 1.055 1.230 1.346sec Thermal time constant, water cooled 2)Tw145198183secLoss at Tnc L0c506 1.012 2.024WLoss at Tnw L0w 3.5647.19314.250W Coolant flow, 5 C temp rise, 35 C inlet Cfl10,220,640,9lit/min Treshold of built-in PTC PTCt130130130oCElectrical data (winding dependent)Nominal speed (knee speed) 5)wn8,738,167,95rad/sec Nominal power, water cooling, knee speed 6)Pnw5,1111,4924,31kWBack E.M.F. between phases Ke24,2024,1524,20VsTorque constant Kt41,9241,8341,92Nm/Arms Temp.coeff. of E.M.F. and Kt dKe/dT-0,09-0,09-0,09%/oC Winding resistance, 20oC Rw7,302,811,19Ohm Winding inductance Lw79,0039,6019,80mH Nominal current, zero speed 1)In05,5312,6727,48Arms Nominal current, zero speed, 2)In14,6935,4176,77Arms Maximum current 3)Ipk29,9460,01119,76Arms Frequency fn333130Hz Efficiency at rated power 6)n0,590,610,63Definitions:1) Motor assembled in light alloy case with outer surface =500% of motor surface, ambient temp. 40 C, copper2) Water cooled motor, water inlet temperature = 35 C,copper temp, 120 C,3) Torque at which magnetic saturation prevents furtheroverloading with any duty factor4) Knee torque corresponding to unlimited constant power5) Limit of constant torque operation with 400 Vac supplyTK 570Technical Data Summary TK 570High peak torque ring motorApplications:Direct drive rotary tables with turning abilityIndexers for transfers, DD Capstan driveWater cooled constant power controllabilitySymbol TK 570-50-50TK 570-100-65TK570-200-65TK570-300-55Units Reference data (winding independent)Nominal torque, S1,0 speed, conduction+convection cooled IC 418 1)Tnc41975016002440Nmrms Nominal torque, S1, 0 speed, water cooled 2)Tnw988180037405670Nmrms Peak torque, S6 10% 1)Tpk1192213545546944Nmrms Maximum torque 3)Tul1450290058008700Nm Maximum structural speed Pn200200200200rad/sec Critical flux control torque 4)Pf1011217840506281NmMotor constant Tw20,1125,4638,2748,06Nm/sqrt(W) Pole number PN64646464 Connection Y Y Y YPhysical data (winding independent)Rotor inertia Jm42079014202050mkgm2 Acceleration at maximum torque apk2839270232073387rad/s2 Outer diameter Dout570570570570mmRotor hole diameter Din480480480480mm Overall stator length Stkout98148248348mmStack length Stk50100200300mm Stator mass Msta304584122kgRotor mass Mrot6112233kg Insulation Class H - F Class H - F Class H - F Class H - F Protection IP 00IP 00IP 00IP 00Thermal data (winding independent)Thermal imp. assumed for cond. Cooling 1)Rthc0,1170,0660,0330,022K/W Thermal impedance, motor to cooling frame 2)Rthw0,0210,0100,0060,004K/W Thermal capacity Cth12.60018.90035.28051.240J/K Thermal time constant cond cooling 1)Tc 1.474 1.247 1.164 1.127sec Thermal time constant, water cooled 2)Tw265189194190secLoss at Tnc L0c706 1.400 2.820 4.220WLoss at Tnw L0w 3.9338.10015.60022.800W Coolant flow, 5 C temp rise, 35 C inlet Cfl11,323,244,765,4lit/min Treshold of built-in PTC PTCt130130130130oCElectrical data (winding dependent)Nominal speed (knee speed) 5)wn7,555,605,867,00rad/sec Nominal power, water cooling, knee speed 6)Pnw7,4610,0721,9339,71kWBack E.M.F. between phases Ke29,0037,7136,0031,70VsTorque constant Kt50,2365,3262,3554,91Nm/Arms Temp.coeff. of E.M.F. and Kt dKe/dT-0,09-0,09-0,09-0,09%/oC Winding resistance, 20oC Rw4,164,391,770,87Ohm Winding inductance Lw52,0040,8220,0010,00mH Nominal current, zero speed 1)In08,3411,4825,6644,44Arms Nominal current, zero speed, 2)In20,7029,0163,14108,70Arms Maximum current 3)Ipk36,0855,49116,27198,07Arms Frequency fn38293036Hz Efficiency at rated power 6)n0,650,550,580,64Definitions:1) Motor assembled in light alloy case with outer surface = 500% ofmotor surface, ambient temp. 40 C, copper temperature 120 C2) Water cooled motor, water inlet temperature = 35 C, copper temp,120 C,3) Torque at which magnetic saturation prevents further overloadingwith any duty factor4) Knee torque corresponding to unlimited constant power operation5) Limit of constant torque operation with 400 Vac supplyTK 795Technical Data Summary TK 795Highpeak torque ring motorApplications:Direct drive rotary tables with turning/milling abilityRotary tables for glass formingWater cooled constant power controllabilityVertical lathesExtruders and forging pressesSymbol TK 795-140-70TK 795-330-80Units Reference data (winding independent)Nominal torque, S1,0 speed, conduction+convection cooled IC 418 1)Tnc36658231Nmrms Nominal torque, S1, 0 speed, water cooled 2)Tnw590014630Nmrms Peak torque, S6 10% 1)Tpk886221975Nmrms Maximum torque 3)Tul950025000Nm Maximum structural speed Pn100100rad/sec Motor constant Tw70,35122,94Nm/sqrt(W) Pole number PN6060 Connection Y YPhysical data (winding independent)Rotor inertia Jm33007600mkgm2 Acceleration at maximum torque apk26862892rad/s2 Outer diameter Dout795795mmDag690690mmRotor hole diameter Din660660mm Overall stator length Stkout200390mmStack length Stk140330mm Stator mass Msta119263kgRotor mass Mrot2663kg Insulation Class C-H Class C-H Protection IP 00IP 00Thermal data (winding independent)Thermal imp. assumed for cond. Cooling 1)Rthc0,0230,014K/W Thermal impedance, motor to cooling frame 2)Rthw0,0070,003K/W Thermal capacity Cth49.980110.460J/K Thermal time constant cond cooling 1)Tc 1.150 1.546sec Thermal time constant, water cooled 2)Tw335309secLoss at Tnc L0c 3.900 6.400WLoss at Tnw L0w12.05524.700W Coolant flow, 5 C temp rise, 35 C inlet Cfl34,670,8lit/min Treshold of built-in PTC PTCt130130oCElectrical data (winding dependent)Nominal speed (knee speed) 5)wn6,225,86rad/sec Nominal power, water cooling, knee speed 6)Pnw36,7185,80kWBack E.M.F. between phases Ke42,5046,00VsTorque constant Kt73,6179,67Nm/Arms Temp.coeff. of E.M.F. and Kt dKe/dT-0,09-0,09%/oC Winding resistance, 20oC Rw0,730,28Ohm Winding inductance Lw13,906,50mH Nominal current, zero speed 1)In049,79103,31Arms Nominal current, zero speed, 2)In84,37193,29Arms Maximum current 3)Ipk161,32392,22Arms Frequency fn3028Hz Efficiency at rated power 6)n0,750,78Definitions:1) Motor assembled in light alloy case with outer surface = 500% of motorsurface, ambient temp. 40 C, copper temperature 120 C2) Water cooled motor, water inlet temperature = 35 C, copper temp, 120 C,3) Torque at which magnetic saturation prevents further overloading with anyduty factor4) Knee torque corresponding to unlimited constant power operation5) Limit of constant torque operation with 400 Vac supplyHighpeak torque large ring motorApplications:Vertical lathes with milling ability, large rotary tablesIndexers for transfers and glass formingExtruders, bending and forging machinesDD generator for wind and mini hydro powerConstant power control 1:10 rangeSymbol TK 1150-250-110Units Reference data (winding independent)Nominal torque, S1,0 speed, conduction+convection cooled IC 418 1)Tnc16900Nmrms Nominal torque, S1, 0 speed, water cooled 2)Tnw26251Nmrms Peak torque, S6 10% 1)Tpk39431Nmrms Maximum torque 3)Tul45000Nm Maximum structural speed Pn80rad/sec Motor constant Tw225,85Nm/sqrt(W) Pole number PN72 Connection YPhysical data (winding independent)Rotor inertia Jm21000mkgm2 Acceleration at maximum torque apk1878rad/s2 Outer diameter Dout1150mmDag990mmRotor hole diameter Din920mm Overall stator length Stkout310mmStack length Stk250mm Stator mass Msta508kgRotor mass Mrot88kg Insulation Class C-H Protection IP 00Thermal data (winding independent)Thermal imp. assumed for cond. Cooling 1)Rthc0,011K/W Thermal impedance, motor to cooling frame 2)Rthw0,0035K/W Thermal capacity Cth213.360J/K Thermal time constant cond cooling 1)Tc 2.347sec Thermal time constant, water cooled 2)Tw747secLoss at Tnc L0c7.760WLoss at Tnw L0w20.100W Coolant flow, 5 C temp rise, 35 C inlet Cfl57,6lit/min Treshold of built-in PTC PTCt130oC Electrical data (winding dependent)Nominal speed (knee speed) 5)wn2,79rad/sec Nominal power, water cooling, knee speed 6)Pnw73,14kWBack E.M.F. between phases Ke83,90VsTorque constant Kt145,32Nm/Arms Temp.coeff. of E.M.F. and Kt dKe/dT-0,09%/oC Winding resistance, 20oC Rw0,28Ohm Winding inductance Lw14,70mH Nominal current, zero speed 1)In0116,30Arms Nominal current, zero speed, 2)In190,15Arms Maximum current 3)Ipk387,08Arms Frequency fn16Hz Efficiency at rated power 6)n0,78 Definitions:1) Motor assembled in light alloy case with outer surface = 500% ofmotor surface, ambient temp. 40 C, copper temperature 120 C2) Water cooled motor, water inlet temperature = 35 C, copper temp, 120C,3) Torque at which magnetic saturation prevents further overloading withany duty factor4) Knee torque corresponding to unlimited constant power operation5) Limit of constant torque operation with 400 Vac supplyHighpeak torque large ring motorApplications:Vertical lathes with milling ability, large rotary tablesIndexers for transfers and glass formingExtruders, bending and forging machinesDD generator for wind and mini hydro powerConstant power control 1:10 rangeSymbol TK 1900-160-300Units Reference data (winding independent)Nominal torque, S1,0 speed, conduction+convection cooled IC418 1)Tnc27000Nmrms Nominal torque, S1, 0 speed, water cooled 2)Tnw36000Nmrms Peak torque, S6 10% 1)Tpk54075Nmrms Maximum torque 3)Tul55000Nm Maximum structural speed Pn30rad/sec Motor constant Tw368,37Nm/sqrt(W) Pole number PN84 Connection YPhysical data (winding independent)Rotor inertia Jm88000mkgm2 Acceleration at maximum torque apk614rad/s2 Outer diameter Dout1900mmDag1740mmRotor hole diameter Din1650mm Overall stator length Stkout230mmStack length Stk160mm Stator mass Msta463kgRotor mass Mrot116kg Insulation Class C-H Protection IP 00Thermal data (winding independent)Thermal imp. assumed for cond. Cooling 1)Rthc0,011K/W Thermal impedance, motor to cooling frame 2)Rthw0,0057K/W Thermal capacity Cth194.460J/K Thermal time constant cond cooling 1)Tc 2.139sec Thermal time constant, water cooled 2)Tw 1.108secLoss at Tnc L0c7.800WLoss at Tnw L0w15.700W Coolant flow, 5 C temp rise, 35 C inlet Cfl45,0lit/min Treshold of built-in PTC PTCt130oC Electrical data (winding dependent)Nominal speed (knee speed) 5)wn2,51rad/sec Nominal power, water cooling, knee speed 6)Pnw90,27kWBack E.M.F. between phases Ke113,00VsTorque constant Kt195,72Nm/Arms Temp.coeff. of E.M.F. and Kt dKe/dT-0,09%/oC Winding resistance, 20oC Rw0,19Ohm Winding inductance Lw11,00mH Nominal current, zero speed 1)In0137,95Arms Nominal current, zero speed, 2)In193,62Arms Maximum current 3)Ipk351,26Arms Frequency fn17Hz Efficiency at rated power 6)n0,85 Definitions:1) Motor assembled in light alloy case with outer surface =500% of motor surface, ambient temp. 40 C, copper2) Water cooled motor, water inlet temperature = 35 C, coppertemp, 120 C,3) Torque at which magnetic saturation prevents furtheroverloading with any duty factor4) Knee torque corresponding to unlimited constant power5) Limit of constant torque operation with 400 Vac supply。