DC-DC变换器模糊变结构-广义通用模型控制
DC-DC变换器讲解学习
输入输出关系:
图3-6 Sepic斩波电路和Zeta斩波电路
U otto ofnf ETt otn onE1 E (2-49)
3-25
2.1.5 Sepic斩波电路和Zeta斩波电路
Zeta斩波电路原理
V处于通态期间,电源E经开关
V向电感L1贮能。
V关断后,L1-VD-C1构成振
荡回路, L1的能量转移至C1,
电压源 电压源的变换
o
t
b)
图3-4 升降压斩波电路及其波形
a)电路图
b)波形
3-20
2.1.4升降压斩波电路和Cuk斩波电路
稳态时,一个周期T内电感L两端电压uL对时间的积分为零,即
数量关系
T
0 uL dt 0
(2-39)
V处于通态
V处于断态
uL = E
EtonUotoff
uL = - uo
(2-40)
能量全部转移至C1上之后,VD
b) Zeta斩波电路
关断,C1经L2向负载供电。
输入输出关系:
Uo
1
E
图3-6 Sepic斩波电路 和 Zeta斩波电路 (2-50)
相同的输入输出关系。Sepic电路的电源电流和负载电流均
连续,Zeta电路的输入、输出电流均是断续的。
两种电路输出电压为正极性的。
3-26
t1 E
I 20
t2
E
t
O
EM
t
c) 电流断续时的波形
图3-1 降压斩波电路得原理图及波形
3-4
2.1.1 降压斩波电路
数量关系
电流连续
负载电压平均值:
Uoton t otnof
电力电子变换器模型方法综述
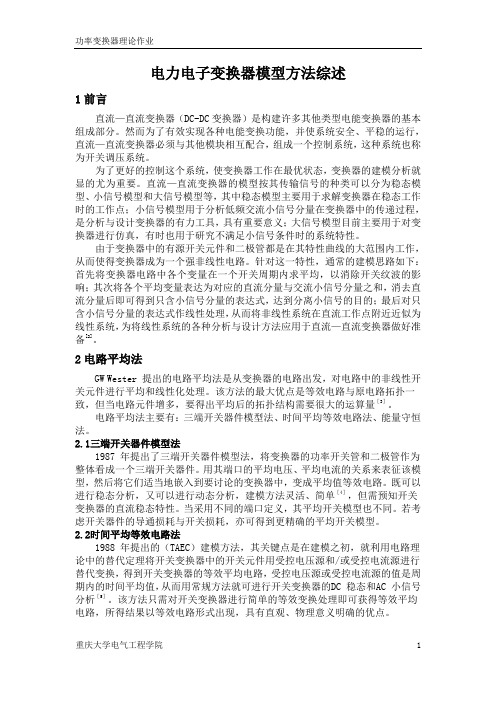
电力电子变换器模型方法综述1前言直流—直流变换器(DC-DC变换器)是构建许多其他类型电能变换器的基本组成部分。
然而为了有效实现各种电能变换功能,并使系统安全、平稳的运行,直流—直流变换器必须与其他模块相互配合,组成一个控制系统,这种系统也称为开关调压系统。
为了更好的控制这个系统,使变换器工作在最优状态,变换器的建模分析就显的尤为重要。
直流—直流变换器的模型按其传输信号的种类可以分为稳态模型、小信号模型和大信号模型等,其中稳态模型主要用于求解变换器在稳态工作时的工作点;小信号模型用于分析低频交流小信号分量在变换器中的传递过程,是分析与设计变换器的有力工具,具有重要意义;大信号模型目前主要用于对变换器进行仿真,有时也用于研究不满足小信号条件时的系统特性。
由于变换器中的有源开关元件和二极管都是在其特性曲线的大范围内工作,从而使得变换器成为一个强非线性电路。
针对这一特性,通常的建模思路如下:首先将变换器电路中各个变量在一个开关周期内求平均,以消除开关纹波的影响;其次将各个平均变量表达为对应的直流分量与交流小信号分量之和,消去直流分量后即可得到只含小信号分量的表达式,达到分离小信号的目的;最后对只含小信号分量的表达式作线性处理,从而将非线性系统在直流工作点附近近似为线性系统,为将线性系统的各种分析与设计方法应用于直流—直流变换器做好准备[2]。
2电路平均法GW Wester 提出的电路平均法是从变换器的电路出发,对电路中的非线性开关元件进行平均和线性化处理。
该方法的最大优点是等效电路与原电路拓扑一致,但当电路元件增多,要得出平均后的拓扑结构需要很大的运算量[3]。
电路平均法主要有:三端开关器件模型法、时间平均等效电路法、能量守恒法。
2.1三端开关器件模型法1987 年提出了三端开关器件模型法,将变换器的功率开关管和二极管作为整体看成一个三端开关器件。
用其端口的平均电压、平均电流的关系来表征该模型,然后将它们适当地嵌入到要讨论的变换器中,变成平均值等效电路。
Buck型DC-DC变换器中单输入模糊控制器的设计与实现

d i1 .9 9 j i n 10 0 0 . 0 2 0 .0 o :0 3 6 / .s . 0 1— 5 5 2 1 . 2 0 7 s
Bc u k型 DC DC 变 换 器 中 . 单 输 入 模 糊 控 制 器 的 设 计 与 实 现
常 昌远 陈 瑶 黄 金 峰 王 青
理 想 . 主要是 因为 DC DC变 换 器 本 质 上 是 一个 这 —
制 器 , 能保 证 系统在输 入 和负 载大 范 围变化 时的 不 稳 定性 ; 此外 , CDC变 换 器 的供 电系 统 、 载 变 D — 负
收稿 日期 :2 1  ̄8 1 作者简介 : 昌远 (9 l ) 男 , 01 - . 0 常 16 一 , 博士 , 副教授 ,cyc e. d .a cy c@Sl eu c . 1 基金项 目:国家核高基重大专项资助项 目(0 9 X00 10 30 3 . 2 0 Z 13 - -0 ) 0 引文格 式 : 昌远 , 常 陈瑶 , 黄金峰 , B c 型 D . c变换器 中单输入模糊控制算法的设计与实现[ 1 东南大学学报 : 等. u k cD J. 自然科学 版,0 2 4 2 1 ,2 ( )2 9—2 3 d i1 .99 ji n 10 0 0 .0 2 0 .0 ] 2 :2 3 .[ o :0 3 6/.s .0 1— 5 5 2 1.2 0 7 s
( olg f nert i ut o tesUnvri ,N nig2 09 C ia C l eo t a dCr i,S uhat iesy aj 10 6, hn ) e I g e c t n
Abs r c :A i lfe u z o to l o i m e ord g tly c n ol d DC- ta t smp i d f z y c n r lag rt i h us d f i ial o t l r e DC o v re s he c n e tr ,t
用于双有源桥DC-DC变换器的全局效率最优调制方法

第44卷第1期电子器件Vol.44No.1Feb.2021 2021年2月Chinese Journal of ElccLmn DevicesGlobal Efficiency Optimal Modulation Method ofDouble Active Bridge DC-DC ConverterHAN Huishan",BI Yanjun LIANG Shu(Department qf Electrical Engineering,Xingtai Polytechnic College,Xingtai Hebei054000,China)Abstract:The triple phase shift(TPS)modulation method of double acLive bridge(DAB)converLer needs Lo get Lhe modulaLion parameters of the system in advance,so it is difficult Lo establish and solve the accurate global efficiency optimal objective function.An optimization method based on particle swarm optimization(PSO)algorithm is proposed to achieve the global efficiency optimization of DAB converter to solve the above problems,so that the converter can operate efficiently in the full load range,maintain low reactive power and peak current value. Simulation and experimental results verify the correctness and feasibility of the proposed method.Key words:double active bridge converter;particle swarm optimization algorithm;triple phase shiftEEACC:1290B doi:10・3969/j・i s sn.1005-9490・2021・01・013用于双有源桥DC-DC变换器的全局效率最优调制方法韩会山",毕艳军,梁舒(邢台职业技术学院电气工程系,河北邢台054000)摘要:双有源桥(DAB)变换器三重移相(TPS)调制方法需要预先求取系统的调制参数,难以建立并求解精确的全局效率最优目标函数。
DC-DC变换器模糊变结构调制控制

Ke wo ds Ap ra hn a y r : p o c iglw Si n d a ibesrcu a o to Eq iae tc nr l Fu z o to l dig mo e v ra l tu tr lc n rl uv ln o to zy e nr l
中图分类 号 :T 2 3 P 7 文献 标志 码 :A
P M tb WM a a 仿真 l
Ab t a t Ti r di o a o to t o s a e di c h t b a n g o o to f c s f r i , i r r t n a c t e r n e,wih si n s r c : l ta t n l c n r l meh d r f u o o t i o d c n r le f t o t n o de o e h n e i p db ma c e i i f e s t l di g
PW M Malb smu ain t i lto a
0 引 言
D — C变换 器的工 作过 程本 身具 有 变结 构 的特 CD 点, 非常适 合使用 变结 构控制 。 。 。但 变结 构控 制也
有 控 制 器开 关 频 率 不 同定 以 及 在 滑模 面 附近 抖 动 等 缺 点 。开 关 频 率 不 同定 给 滤 波 器 的设 计 带 来 冈难 , 抖 而 动 则 会影 响控 制 的精 确 性 , 而 激 发 系 统 未 建 模 部 分 从
请简述模糊控制器的组成及各组成部分的用途。

模糊控制器是一种基于模糊逻辑理论的控制系统,它利用模糊集合的概念来描述模糊输入和输出,通过模糊规则和模糊推理实现对系统的控制。
模糊控制器的组成主要包括模糊化、模糊推理、解模糊和规则库四个部分,每个部分都有其独特的用途。
1. 模糊化模糊化是将系统的实际输入转化为模糊集合的过程。
在模糊控制系统中,输入往往是模糊的、不确定的,因此需要将这些模糊的输入转化为模糊集合。
模糊化的主要目的是将具体的输入转化为模糊语言值,如“很冷”、“冷”、“适中”、“热”、“很热”等,以便更好地描述系统的输入状态。
2. 模糊推理模糊推理是模糊控制器的核心部分,它用于根据模糊规则和模糊输入来得出模糊输出。
模糊推理的过程是基于一系列的模糊规则,这些规则描述了系统输入和输出之间的关系。
通过模糊推理,模糊控制器能够根据输入的模糊语言值,利用模糊规则进行推理,从而得出模糊输出的模糊语言值。
3. 解模糊解模糊是将模糊输出转化为具体的控制量的过程。
在模糊控制系统中,输出往往是模糊的语言值,需要通过解模糊将其转化为具体的控制量。
解模糊的方法有很多种,常见的方法包括最大隶属度法、加权平均法和中心平均法等。
解模糊的目的是将模糊输出转化为可以直接应用于控制系统的具体输出值。
4. 规则库规则库是模糊控制器中存储的一系列模糊规则的集合。
模糊规则描述了系统输入和输出之间的关系,它通常采用“如果…那么…”的形式来表示。
在模糊控制器中,规则库起着至关重要的作用,它包含了系统的专业知识和经验,是模糊控制器能够有效进行模糊推理的基础。
总体来说,模糊控制器的组成部分分别完成了模糊输入的转化、模糊推理的实现、模糊输出的转化和存储的模糊规则,这些部分相互协作,共同实现了对模糊、不确定系统的精确控制。
模糊控制器在工业控制、汽车控制、电力系统控制等领域有着广泛的应用,其独特的优势使其成为一种不可忽视的控制方法。
模糊控制器作为一种基于模糊逻辑理论的控制系统,在实际应用中具有诸多优势。
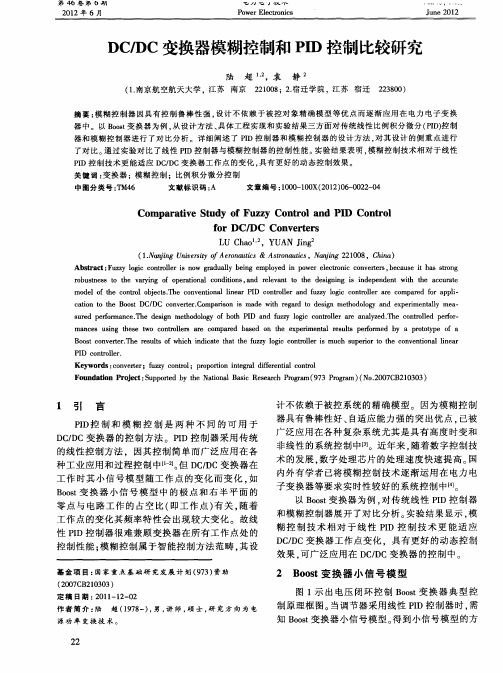
DC/DC变换器模糊控制和PID控制比较研究
特 定 工作 点 Q , R) 控制 到输 出 电压 的 ( D, 处
ma c s u i g t e e t o c n r l r ae c mp e a e n h x e me t e u s p ro e y r tt p f a n e sn h s w o tol s r o a d b s d o t e e p r n a r s h ef r d b a p o oy e o e r i l m
摘要 : 糊控 制器 因 具有控 制鲁 棒性 强 , 模 设计 不 依赖 于被控 对 象精 确模 型等 优 点而 逐渐 应用 在 电力 电子变 换 器 中。以 B ot 换器 为例 , os变 从设计 方法 、 具体 工程 实现和 实验 结果三方 面对传 统线性 比例积 分微 分 (i ) ro 控制 器和模 糊控 制器进 行 了对 比分析 。详细 阐述 了 PD控制 器和 模糊控 制器 的设 计方 法 , I 对其 设计 的侧 重 点进行 了对 比。 过实验 对 比 了线性 PD控 制器 与模糊控 制器 的控制 性能 。 通 I 实验结 果表 明 , 糊控 制技 术相对 于线性 模
一
个 比例 环 节 , : 即
H( ) 1G , G () 1 s= / : / () 4
I
(I ) 厂
.
1V ] hS
调节器
一 V c} D =
&J -
: ;
I
DC-DC变换器滑模变结构控制的研究的开题报告
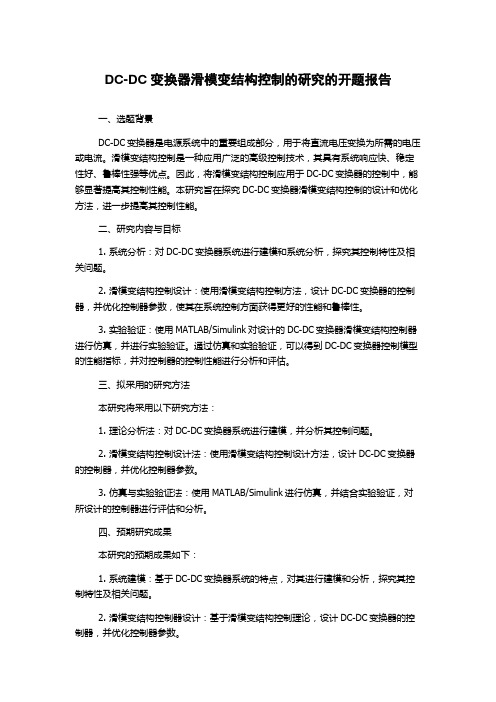
DC-DC变换器滑模变结构控制的研究的开题报告一、选题背景DC-DC变换器是电源系统中的重要组成部分,用于将直流电压变换为所需的电压或电流。
滑模变结构控制是一种应用广泛的高级控制技术,其具有系统响应快、稳定性好、鲁棒性强等优点。
因此,将滑模变结构控制应用于DC-DC变换器的控制中,能够显著提高其控制性能。
本研究旨在探究DC-DC变换器滑模变结构控制的设计和优化方法,进一步提高其控制性能。
二、研究内容与目标1. 系统分析:对DC-DC变换器系统进行建模和系统分析,探究其控制特性及相关问题。
2. 滑模变结构控制设计:使用滑模变结构控制方法,设计DC-DC变换器的控制器,并优化控制器参数,使其在系统控制方面获得更好的性能和鲁棒性。
3. 实验验证:使用MATLAB/Simulink对设计的DC-DC变换器滑模变结构控制器进行仿真,并进行实验验证。
通过仿真和实验验证,可以得到DC-DC变换器控制模型的性能指标,并对控制器的控制性能进行分析和评估。
三、拟采用的研究方法本研究将采用以下研究方法:1. 理论分析法:对DC-DC变换器系统进行建模,并分析其控制问题。
2. 滑模变结构控制设计法:使用滑模变结构控制设计方法,设计DC-DC变换器的控制器,并优化控制器参数。
3. 仿真与实验验证法:使用MATLAB/Simulink进行仿真,并结合实验验证,对所设计的控制器进行评估和分析。
四、预期研究成果本研究的预期成果如下:1. 系统建模:基于DC-DC变换器系统的特点,对其进行建模和分析,探究其控制特性及相关问题。
2. 滑模变结构控制器设计:基于滑模变结构控制理论,设计DC-DC变换器的控制器,并优化控制器参数。
3. 仿真与实验验证:使用MATLAB/Simulink对所设计的控制器进行仿真并结合实验验证,评估和分析控制器性能,并得到DC-DC变换器控制模型的性能指标。
五、研究意义DC-DC变换器作为电源系统中重要的组成部分之一,其控制性能对整个电源系统的性能至关重要。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关 键 词 : 广 义 通 用模 型 ; 相 对 阶 ; 模 糊 控 制 ; 变结 构 控 制 ; 趋 近 律 ; M A B仿 真 TI A 中 图 分 类 号 : TP 7 23 文献标识码 : A d i1 . 6 6 jis . 0 6 3 6 . 0 1 0 . 2 o : 0 3 9 /.sn 1 0 — 9 X 2 1 . 4 0 4
f z y c n r l O f rh r e p d t h e p n e tme a d we k n t e c a t r g p o lm .Th e u to i l t n i d c t s t a u z o to u t e x e ie t e r s o s i n a e h h te i r b e t n e r s l fs mu a i n ia e h t o
( no ma inC le e,Ea t ia Unv riy o S in ea d Teh o o y,S a g a 0 2 7, If r to olg s n i est f ce c n c n lg Ch h n h i2 0 3 P.R.C ia hn )
Re ev d 2 u y 2 1 ;r v s d 1 gu t2 1 c i e 8 J l 0 1 e ie 8 Au s 0 1;a c ptd 2 g s 0 1 c e e 4 Au u t2 1
T heFu z a ibl r c u e Ge r lz d Co m o z y V ra e St u t r - ne a ie m n
M o e n r l fDC— DC Co v r e d lCo to o n e tr
W ANG W e — c a ,GUO i g u n ho B n —j n
统 的控 制 效 果 。通 过 广 义通 用模 型 方 法将 强 非 线 性 系统 转 化 为标 准三 阶 线 性 系统 并 由此 构 成 G MC控 制 器 。 由 于 C
在 Dc D 变换 器参 数 改 变 情 况 下 G MC控 制 器将 不 能 保 持 系统 的 线 性 特 点 , 此 构 造 F MC控 制 器 , 用 变 结 — c C 因 S 使 构控 制 增 加 系统 的 鲁 棒 性 并 利 用模 糊 控 制 减 少 变结 构 控 制 的抖 动 并 提 高 系统 响 应 时 间 。 通 过 仿 真 实 验 证 明 了该 方 法 的 可 行 性 以及 良好 的动 静 态性 能 、 强 的鲁 棒 性 。 较
DC—DC变 换 器 模 糊 变 结 构 一广 义 通 用 模 型 控 制
王 文超 , 郭 丙君
( 东理工大学信息学 院, 海 203) 华 上 02 7
摘 要 : 针 对 DC—DC 变换 器强 非 线 性 , 出 了一 种 FS 提 MC- GCMC控 制 方 法 , 增 强 对 DC—DC 变换 器 系 - 以
第 2 卷 第 4 4 期
21 0 1年 8月
石
油
化
工
高
等
学
校
学
报
V o .24 1
N O.4
J OURNAL OF PE TROCHEM I CAL UNI VERS T
文 章 编 号 :0 6 3 6 2 1 ) 4 0 5 4 1 0 — 9 X( 0 1 0 —0 9 —0