地磁匹配导航的精度分析
地形辅助导航系统的精度分析

Ξ 收稿日期:2008-12-01作者简介:代国峰(1983—),男,重庆潼南人,硕士研究生,主要从事导航、制导与控制研究.地形辅助导航系统的精度分析Ξ代国峰,陈 坚,罗 宁(第二炮兵工程学院,西安 710025)摘要:就影响地形辅助导航系统定位精度的因素进行了深入分析,并从硬件和软件2个方面给出了提高其定位精度的有效方案.关键词:地形辅助导航系统;惯性导航系统;导航精度中图分类号:V24文献标识码:A 文章编号:1006-0707(2009)03-0063-02 所谓地形辅助导航系统T ANS (terrain aided navigation system ),实质是由惯性导航系统I NS (inertial navigation sys 2tem )、无线电高度表和数字地图构成的组合导航系统,该系统的显著特点是能消除I NS 的累积误差,修正I NS 的导航信息,提高导航精度.T ANS 作为一种新型导航系统之所以引起人们的广泛注意,是因为它在海湾战争、科索沃战争中发挥了良好的实战应用效果,达到了精确打击目标的目的.而且与通常的组合导航系统相比,T ANS 只增加了大容量存储器这一唯一硬件,而其导航精度却能提高一个数量级,可达到十几米的定位精度,这正是它的生命力之所在.1 地形辅助导航系统的原理 地形辅助导航系统硬件设备主要由以下几部分组成:I NS 、雷达高度表、气压高度表(或惯性导航系统的高度通道输出)、数字地图、地形相关算法、大容量存储器和高速处理器的等.其简化方块图如图1所示.图1 地形辅助惯导原理 地形辅助导航系统的工作原理:由地形特征传感设备如雷达高度表、气压高度表和大气数据计算机测量出飞行器下方的地形剖面或其他特征,推导I NS 估算出的地形特征位置,再以这个估算位置为基础,在数字地图存储装置中搜索出能够与测得的地形特征有最好拟合的地形特征,这个地形特征在数字地图中的位置,便是飞行器的精确位置[1,2,3,7].然后再用这个精确的位置数据对I NS 进行修正,如此不断迭代,就能使飞行器连续不断的获得任意时刻的精确位置,从而测出目标到飞行器的精确距离.2 地形辅助导航精度的决定因素2.1 飞行器的高度测量精度在地球陆地表面上任何地点的地理坐标,都可以根据其周围地域的等高线地图或地貌来单值地确定.当飞行器飞越某块已数字化了的地形时,机载雷达高度表测得飞行器离地面的相对高度h r ,同时气压式高度表与I NS 相综合测得飞行器的绝对高度h ,h 与h r 相减可得到地形高度h t ,如图2所示.地形高度h t 与数字地图进行相关分析,从而得到飞行器的估计位置[1,5].期间气压高度表和雷达高度表的测量精度就直接影响到地形高度的误差大小,从而影响地形辅助导航的匹配精度.图2 高度测量2.2 惯性导航系统的误差I NS 是一种自主式导航系统,它完全依靠机载设备自主地完成导航任务,和外界不发生任何光、电联系,因此隐蔽性好,工作不受气象条件的限制[6].因此在地形辅助导第30卷 第3期四川兵工学报2009年3月航系统中,惯导系统作为主导航系统,I NS 的定位误差特性就决定了系统状态方程的特性.状态方程的特性影响系统的可观测性,影响状态估计的结果.2.3 数字地图的精度实现地形辅助导航的前提是必须有所需要的符合质量要求的基准数据库,数字高程地图制备过程主要是把一幅相当于地面上某个区域的地图分成许多小方格,然后在其相应的小方格上记入平均的海拔高度,结果就可以得到用数字形式表示海拔高度变化的数字阵列.图3表示利用等高线制作数字高程地图的过程.图3 数字地图的制作 以数字高程制作为例,它主要有以下几种制作方法[4]:①采用大地测量的方法直接从地形上测出高程;②利用航空摄影包括无人侦察机测量图片,采用数字高程判读仪从两张对应的照片上读取高程;③利用侦察卫星或高精度商用遥感卫星获得的照片读取高程;④从小比例尺普通等高线地形图上读取高程.数字地图的误差主要产生在制作过程中,不同的数字地图制作方法会产生不同的误差源.一般包括测量误差、判读误差和制图误差等.而基准数字地图的误差越小,它就和实际地图越接近,从而有助于改善地形辅助导航的匹配精度.2.4 地形匹配区的特性地形的特征参数是影响定位精度和匹配概率的重要因素,它主要包括地形高程数据标准差、粗糙度和相关长度等,分别反映了地形的总体起伏、平均光滑程度和地形变化的快慢[5,9].而这些变化影响地形高度匹配模型的可观测性,从而影响地形高度匹配的结果.通过优化飞行器的飞行航线,选择合适的地形区域,可以提高地形辅助导航的匹配精度.2.5 地形辅助导航的匹配方法地形辅助导航的匹配方法的实质就是一种状态估计方法,不同的估计方法使用不同的估计准则,得到最优估计值也不相同.现在在地形辅助导航系统中,通常采用TERC OM 和SIT AN [1,7,11]这2种典型的算法.使用MS D 算子的TERC OM 方法的实质是最小二乘估计,最小二乘估计的缺点是没有考虑状态随机变量的统计特性.基于扩展卡尔曼滤波算法的SIT AN 方法本质是把惯导误差的变化规律和地形线性化后使用线性最小方差估计,它用于地形辅助导航匹配算法的缺点是地形高度匹配问题本质是非线性状态估计问题,在初始位置误差较大和地形斜率变化剧烈的区域线性近似误差较大,采用线性最小方差估计准则的SIT AN 方法给出的结果有可能发散.3 提高地形辅助导航精度的途径 地形辅助导航系统与通常的导航系统相比,只增加了大容量存储器这唯一的硬件,其主要功能是通过软件来实现,因此在提高T AN 的导航精度上我们就可以从硬件和软件2个方面着手.3.1 硬件方法①使用高精度的惯性器件.在T AN 系统中,惯性导航系统是主导航系统,惯导系统的导航精度直接影响T AN 系统的精度,因此采用高精度的惯性器件可以提高惯导系统的导航精度,从而提高T AN 系统的导航精度.②选用高精度的气压高度表和雷达高度表.高精度的气压高度表和雷达高度表可以提高T AN 系统的测高精度,从而可以得到更加接近真实值的地形实际高度h t ,减小地形高度测量噪声,从而提高导航精度.③制作高精度的数字地图.数字地图是使用地形辅助导航系统的前提,是地形辅助导系统的匹配依据.而现在几种制作数字地图的基础都是需要高精度的测绘工具,测出高精度的地形数据,以制作高精度的数字地图.3.2 软件方法①研究和改善地形高度匹配方法[11-13].地形高度匹配方法是指利用实时测量的地形高度值序列数据估计载体位置在基准数字地图中位置坐标的方法.在地形匹配系统各传感器性能、基准数字地图和飞行航线已经确定的情况下,地形高度匹配方法决定了地形高度匹配系统的性能.改善地形高度匹配方法可以提高地形高度匹配系统的性能.②规划飞行航线选择合适的地形匹配区.地形特征参数比较明显的地形通常比较适合做地形匹配区.地形匹配区域的选择主要有3个步骤:①根据平原、丘陵、山区等地形类型的区分来进行初选;②计算地形有关特征参数进行精选;③设置定位精度等参数,通过适当的模拟仿真,进行最后的选择.常用的算法都是基于地形的统计模型进行分析的,如地形高程标准差、粗糙度、系统总噪声标准差综合选择法、地形坡度标准差选择法、地形信息分析法等等.4 结论 本文中就地形辅助导航系统的导航定位精度为对象进行了综述和讨论,分析了影响T AN 系统精度的5个主要因素,并相应的从软硬件2个方面提出了提高导航精度的途径.综上所述,使用高精度的硬件来提高导航精度会使整个系统的成本大大增加,而通过软件的方法来提高系统的性能则可令成本降低,这将是我们目前研究的重点方向.(下转第75页)46四川兵工学报的增加速度越来越慢,单位舰艇数量增加所带来的编队作战效能增加越来越小,费效比不断恶化.这是因为编队的作战效能是多平台协同作战的有机整体的作战效能,并非单个水面舰艇平台作战效能的简单累加,具有一定的饱和性.这也说明要提高我国混合舰艇组队的作战效能,不能只是增加数量,更应该注重提高质量,尤其是增强编队的战场侦察监视和情报搜集能力,提高编队的反潜搜索警戒能力,适应现代作战从平台中心战向网络中心战的转变,增强编队的无线数据通信网络传输能力.3 结束语 本文中构建了基于混合舰艇组队侦察监视体系、指挥控制计算体系、通信保障体系、为电子对抗体系和攻防打击体系的作战效能评估指标体系,并采用层次分析法对编队作战能力层次结构进行分解,建立了编队作战效能分析的多属性综合评价模型与方法,而不是将各个水面舰艇平台的作战效能进行简单的累加.在此基础上,利用基于领域专家知识的定性与定量相结合的量化指标方法,对美国、俄罗斯和法国典型混合舰艇组队编成的作战效能进行了量化研究.结果表明,美国混合舰艇组队作战效能最高,俄罗斯混合舰艇组队作战效能比法国略高.将我具有不同使命任务的水面舰艇构成混合舰艇组队并定量计算其作战效能,可以发现,随着舰艇数量的增加,混合舰艇组队的作战效能也随之增大,但是,随着舰艇数量的增加,编队作战效能曲线趋于平缓,即编队作战效能的增加速度越来越慢,单位舰艇数量增加所带来的编队作战效能增加越来越小,费效比不断增大.这说明要提高我国混合舰艇组队的作战效能,不能只是增加数量,关键是要提高质量,尤其是增强编队的战场侦察监视和情报搜集能力,提高编队的反潜搜索警戒能力,适应现代作战从平台中心战向网络中心战的转变,增强编队的无线数据通信网络传输能力.参考文献:[1] 吴永杰,周玉兰.海上舰艇编队系统[M].北京:国防工业出版社,1999.[2] 张浚乾,袁卫卫,曾熠,等.基于SE AS方法的C4ISR系统效能评价[J].火力与指挥控制,2006,31(8):25-29.[3] 戴自立.现代舰艇作战系统[M].北京:国防工业出版社,1999.[4] 罗伯特・哈钦森.简氏军舰识别指南[M].太原:希望出版社,2003.(上接第64页)参考文献:[1] 周战馨.复合制导原理(下册)[M].西安:第二炮兵工程学院,2000.[2] 王英钧.地形辅助导航综述[J].航空电子技术,1998(1):24-29.[3] 吕宗祺.地形辅助导航[J].航空电子技术,1993(2):2-9.[4] 袁会昌,刘光斌.地形辅助导航系统的关键技[J].现代电子技术,2002(1):75-77.[5] 李雄伟,刘建业,康国华.TERC OM地形高程辅助导航系统发展及应用研究[J].中国惯性技术学报,2006,14(1):34-40.[6] 马昕,袁信.地形辅助惯性导航系统研究[J].南京航空航天大学学报,1997(3):289-294.[7] 裴小东,刘光斌,王宏力.复合制导技术概述[J].飞航导弹,2001(10):54-56.[8] 吴尔辉,沈林成,常文森.地形匹配辅助导航中的地形独特性分析[J].国防科技大学学报,1998(3):5-8. [9] T errain F ollowing for Low Altitude Penetration[C]//7th In2ternational C on ference on E lectronic Measurement&Instru2 ments(ICE MI’2005).[S.l.]:[s.n.],2005.[10]徐克虎,沈春林.地形特征匹配辅助导航方法研究[J].东南大学学报:自然科学版,2000(3):23-25. [11]苑娜.地形辅助导航系统的匹配算法研究[D].黑龙江:哈尔滨工程大学,2007.[12]赵俊梅.弹道导弹G PS/惯性组合导航系统的研究[J].四川兵工学报,2005(5):12-14.[13]袁信,俞济祥,陈哲.导航系统[M].北京:航空工业出版社,1993.57杨海波,等:混合舰艇组队作战效能。
地磁暴对导航定位系统的影响及应对

地磁暴对导航定位系统的影响及应对地磁暴是一种自然现象,由太阳风带来的高能带电粒子进入地球的磁场引发。
这种天气现象对于导航定位系统的运行和准确性有着重大的影响。
本文将探讨地磁暴对导航定位系统的影响,并提出相应的应对措施。
一、地磁暴对导航定位系统的影响地磁暴对导航定位系统的影响主要表现在以下几个方面:1. GPS信号干扰:地磁暴会干扰GPS卫星信号的传输和接收,导致导航定位系统无法准确获取卫星信号,从而影响定位的准确性。
2. 磁场扰动:地磁暴会引起地球磁场剧烈的扰动,导致磁场方向和强度发生变化,影响磁感应型导航定位系统的准确度。
3. 电离层扰动:地磁暴产生的电离层扰动会导致电离层延迟和折射的增加,进而影响无线电波的传播,使得基于无线电波的导航定位系统的测量结果产生误差。
4. 磁性材料干扰:地磁暴会改变地球磁场,这可能导致一些磁性材料(如铁、钢等)的磁性质量发生变化,从而对基于磁感应的导航定位系统产生影响。
二、应对地磁暴对导航定位系统的影响为了有效应对地磁暴对导航定位系统的影响,以下是一些建议的措施:1. 多传感器融合定位:在地磁暴影响下,单一的导航定位系统可能出现不确定性。
采用多种传感器融合定位方法,如GPS、惯性导航、视觉传感等,可以提高定位系统的鲁棒性和准确性。
2. 故障检测与容错:建立完善的故障检测与容错机制,及时发现并纠正受地磁暴影响导致的误差。
3. 数据处理算法优化:针对地磁暴对导航定位系统的影响特点,优化导航定位的数据处理算法,减小地磁暴造成的误差。
4. 数据库更新:定期更新导航定位系统的卫星、地图等数据库,以保证系统中的信息是最新且准确的,降低地磁暴带来的影响。
5. 算法调整:根据地磁暴的影响情况,调整导航定位系统的算法参数,以适应不同的环境条件。
6. 冗余备份:在关键位置和系统上加入冗余备份,以便在地磁暴导致的系统故障时能够及时切换到备份系统,确保导航定位系统的正常运行。
三、总结地磁暴对导航定位系统的影响是不可忽视的,它可能导致定位不准确、信号干扰、磁场扰动、电离层扰动和磁性材料干扰等问题。
磁层变异特性对卫星导航精度提升影响评估

磁层变异特性对卫星导航精度提升影响评估导航系统在现代社会中起着重要的作用,尤其是卫星导航系统。
人们依赖卫星导航系统来进行精确定位、导航和时间同步等任务。
然而,地球磁层的变异特性可能对卫星导航精度产生重要影响。
本文将评估磁层变异特性对卫星导航精度提升的影响。
首先,让我们了解什么是地球磁层的变异特性。
地球磁场由地球内部流动的熔融金属产生,它像一个大磁体一样,保护着地球。
然而,地球磁场并不是完全均匀的,它存在一些不规则的地方,就像一个磁铁的北极和南极一样。
这些不规则的地方就是磁层变异特性。
磁层变异特性对卫星导航精度有影响的原因之一是它会导致定位误差。
卫星导航系统使用卫星信号与接收器之间的时间差来计算位置。
然而,磁层变异会导致信号的传播速度发生变化,进而引起定位误差。
特别是在接收器距离磁层变异区域较近的情况下,定位误差可能变得更加显著。
其次,磁层变异特性还会影响卫星导航系统的精度。
卫星导航系统通过测量卫星信号的传播时间和接收器收到信号的时间来计算距离。
然后,利用三角测量原理,导航系统可以计算出接收器的精确位置。
然而,磁层变异特性可能导致传播时间的变化,从而影响导航系统计算距离的准确性。
因此,磁层变异特性对导航系统的精度提升有重要的影响。
此外,磁层变异特性还可能对卫星导航系统的时间同步有影响。
卫星导航系统需要确保卫星信号和接收器之间的时间同步,以便进行准确的位置计算。
然而,磁层变异特性可能导致信号传播速度的变化,进而影响时间的同步性。
这可能导致导航系统的时间计算不准确,进而影响导航精度的提升。
针对磁层变异特性对卫星导航精度提升的影响,有一些方法可以应对。
首先,可以利用现有的磁场模型来校正导航系统的定位误差。
这些模型基于对地球磁场的测量数据,并提供了关于磁层变异特性的信息。
通过使用这些模型,可以减少由磁层变异引起的定位误差,并提高导航精度。
其次,可以采用差分GPS技术来提升导航精度。
差分GPS通过使用参考站的准确位置来校正接收器的定位误差。
地球磁场对导航系统的影响
地球磁场对导航系统的影响导航系统在现代社会中扮演着至关重要的角色,我们几乎在生活的方方面面都使用到了导航系统。
然而,我们有时会忽视地球磁场对导航系统的影响。
地球磁场是一种强大而神秘的力量,对导航系统的运作有着重要的影响。
本文将探讨地球磁场对导航系统的影响,并解释其原因和应对措施。
首先,地球磁场对导航系统的主要影响之一是指南针的偏转。
指南针是传统导航系统的重要组成部分,它依靠地球磁场提供导航方向。
然而,地球磁场并非完全稳定,它在时间和空间上都存在变化。
这种变化会导致指南针产生偏转,从而引起导航系统的误差。
当我们在使用指南针进行导航时,我们必须密切关注地球磁场的变化,并进行相应的校正,以确保导航的准确性。
其次,地球磁场对卫星导航系统也有影响。
卫星导航系统如全球定位系统(GPS)使用地球上的卫星来提供导航信息。
然而,地球磁场的变化会干扰卫星的信号传输。
这种干扰会导致卫星导航系统的精度下降,导航误差增大。
因此,在使用卫星导航系统时,我们也需要考虑地球磁场的影响,并进行相应的校正,以确保导航的准确性。
那么,为什么地球磁场会对导航系统产生影响呢?这是因为地球磁场本身具有一定的不规则性。
地球磁场的产生是由地球内部的液态外核和固态内核的运动所决定的。
这种运动会不断改变地球磁场的形态和磁力,导致导航设备受到误差的影响。
此外,地球磁场还受到太阳风等宇宙天体的影响,这也会对导航系统产生一定的干扰。
面对地球磁场对导航系统的影响,我们可以采取一些应对措施以提高导航的准确性。
首先,我们可以利用现代技术对导航设备进行校正。
许多现代导航设备都配备了磁力仪和加速度计等传感器,可以检测和校正地球磁场的变化。
通过及时的校正,我们可以降低导航误差,提高导航的准确性。
其次,我们可以利用多个导航系统的组合来提高导航的稳定性和准确性。
如今,除了传统的指南针和卫星导航系统,还有惯性导航系统和地面基站等可用于导航的技术。
通过将多个导航系统进行组合,我们可以在一定程度上减小地球磁场的影响,提高导航的可靠性。
地球磁场变化与极地导航准确性

地球磁场变化与极地导航准确性地球磁场是我们生活中不可见但却十分重要的存在。
它围绕地球形成一个巨大的保护罩,阻挡了太阳风带来的宇宙射线和粒子,保护了地球上的生命。
同时,地球磁场也对于导航和定位系统起到了重要的作用。
然而,近年来地球磁场发生了一些变化,对极地导航的准确性造成了一定影响。
首先,让我们来了解一下地球磁场的基本结构和运行机制。
地球内部有一个由液体铁和镍组成的外核,在这个外核内部存在着运动的流体对流环流,形成了类似于电流的运动。
这些流体对流产生了电场,从而形成了地球磁场。
地球的磁北极和磁南极不完全对应地球的地理北极和南极,而是有一定的偏移角度。
然而,近年来科学家们发现地球磁场有所变化,其中最引人注目的就是磁北极的运动速度加快。
磁北极是地球磁场在地球表面上的一个点,它的位置决定了地球磁场的朝向和强度。
传统上,磁北极与地理北极是重合的,但是最近几十年里,磁北极不断向西偏移,且偏移速度不断加快。
这种变化对于极地导航系统来说是一个巨大的挑战。
极地导航是指在极地地区进行定位和导航的技术和系统。
由于磁北极的偏移,传统的基于磁场的导航系统在极地地区的准确性受到了一定程度的影响。
以磁罗盘为例,磁北极的偏移会导致指针的指向与地理北极出现偏差,给导航带来极大的不确定性。
为了解决这一问题,科学家们提出了一种新的导航准确性模型。
这个模型是基于地球磁场的变化研究得出的,通过对磁场变化的实时监测和建模,可以更准确地预测磁北极的位置和磁场的朝向。
在这个基础上,可以进行更精确的导航和定位。
除了磁北极的偏移,地球磁场的其他变化也会对极地导航的准确性产生影响。
地球磁场的强度和形状也会随着时间而改变,这将导致导航系统需要不断进行校准和调整。
此外,地球磁场的变化还会对导航系统中使用的磁传感器造成影响,使其读取的数据出现偏差。
因此,科学家们需要对地球磁场的变化进行深入研究,以提高极地导航系统的准确性。
总的来说,地球磁场的变化对于极地导航的准确性有一定的影响。
磁罗盘的精度与误差分析

磁罗盘的精度与误差分析磁罗盘是一种常用的导航仪器,用于确定方位和导航。
它通过测量地球磁场的方向来确定北方向,并结合其他导航工具如地图和望远镜来提供准确的方向信息。
然而,磁罗盘的测量结果并不是绝对准确的,因为它们可能受到各种误差的影响。
首先,磁罗盘的精度与其制造质量和设计有关。
制造商应确保磁罗盘具有良好的机械结构和高质量的磁性材料。
制造过程中的不良材料或生产错误可能导致指示不准确的结果。
因此,选择一个知名的制造商并购买质量可靠的磁罗盘是很重要的。
此外,环境条件也会对磁罗盘的精度产生影响。
磁罗盘应该在无风的条件下使用,并要远离电子设备、大型金属物体和其他可能干扰地球磁场的物体。
这些干扰源可能会引起磁罗盘的指示偏离,并导致不准确的方向测量。
因此,在使用磁罗盘之前,应该仔细考虑周围环境,并尽量消除潜在的干扰。
另一个影响磁罗盘准确度的因素是外部磁场的干扰。
地球上的磁场并不是均匀的,而且可能会受到其他物体或地理特征的影响。
例如,附近有大型岩石或金属物体可能会扭曲附近的磁场,从而影响磁罗盘的指示。
在这种情况下,使用磁罗盘的精度就会受到限制。
为了减小这种误差,使用磁罗盘时应避免靠近这些干扰源,并了解附近地理特征的可能影响。
除了外部干扰,磁罗盘本身也可能存在一些内部误差。
例如,磁罗盘的刻度盘或指针可能存在误差,导致测量结果的偏离。
为了减小这些误差,磁罗盘制造商通常会在生产过程中进行校准,以确保其准确性。
此外,使用磁罗盘时,使用者应确保仔细读取并准确解读刻度盘上的指示。
最后,使用者自身的技能和经验也会对磁罗盘的准确性产生影响。
正确的使用技巧和解读能力是确保测量结果准确的关键。
使用者应该接受相关的培训和指导,以熟练掌握使用磁罗盘的方法和技巧。
此外,在实际使用中,使用者还应注意消除人为误差,如身体姿势和手持稳定等方面的因素。
总体而言,磁罗盘的精度主要取决于其制造质量和设计、环境条件、外部磁场干扰、内部误差以及使用者的技能和经验。
地磁信号误差模型分析及补偿算法
H hard
移量测量及曲面拟合的平差处理方案求取补偿参
数。以往文献[8~9]中直接利用空间椭球面一般方
程求解补偿系数的方法忽略了椭球面方程参数之
间的相互关系,这使得测量结果不准确。本文采用
的方案既可有效地解决上述所列问题,同时也避免
了由于数值过大而引起的数值计算问题。
2
信号检测模型分析
2.1
磁传感器自身测量误差组成
University,Qingdao
Abstract
266041)
The carrier of geomagnetic navigation needs real-time measurement information of the geomagnetic field for naviga⁃
tion and positioning. However,three-axial magnetic field measuring instrument exists errors itself,the carrier's own constant mag⁃
V241.6
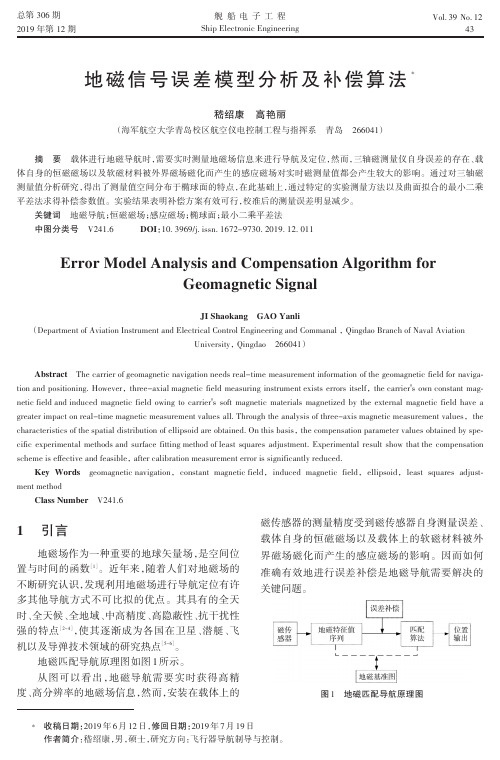
磁传感器的测量精度受到磁传感器自身测量误差、
引言
载体自身的恒磁磁场以及载体上的软磁材料被外
地磁场作为一种重要的地球矢量场,是空间位
[1]
界磁场磁化而产生的感应磁场的影响。因而如何
置与时间的函数 。近年来,随着人们对地磁场的
准确有效地进行误差补偿是地磁导航需要解决的
不断研究认识,发现利用地磁场进行导航定位有许
关键问题。
多其他导航方式不可比拟的优点。其具有的全天
时、全天候、全地域、中高精度、高隐蔽性、抗干扰性
强的特点[2~4],使其逐渐成为各国在卫星、潜艇、飞
地磁匹配制导基准图精度评价方法及其仿真实现

( 二炮兵工程学院 。 安 第 西 70 2 ) 1 0 5
摘
要 : 了 提 高 基 准 图与 实 际 地磁 场信 息 的 符合 程 度 , 为 基 准 图误 差 修 正 提 供 依 据 , 中 从 分 析 影 响 基 准 为 并 文
图 精 度 的 因素 人 手 , 基 准 图 制 备 过 程 中 可 能 出 现 的 误 差 和 影 响 因 素 逐 一 分 析 , 对 各 种 误 差 和 影 响 因 素 的 把 针 特 点 提 出 了 4种精 度 评 价 方 法 。 此 为 依 据 对 基 准 图 的 制 备 方 法 进 行 了 改 进 ; 后 在 选 定 区 域 进 行 了 基 准 图 以 最
因素人手 , 各 种 误 差 和 影 响 因 素 进行 分 类 , 对 针
0 引 言
地磁 匹配 制 导 基 准 图 制 备 的过 程 从 大 的方 面来说 可 以分成 两 大部 分 : 基准 图制 备 和基 准 图 精 度评 价 。基 准 图 的精 度 是 指基 准 图 中 的数 据
第 2 9卷
第 3期
弹
箭与制Fra bibliotek导学
报
Vo . 9 NO 3 12 .
20 0 9年 O 6月
J u n lo oe t e .Ro k t ,Mislsa d Gud n e o r a fPrjci s l c es si n ia c e
J n 2 0 u 0 9
地磁 匹配制 导基 准图精度评价方法 及其仿真实现
中 图 分 类 号 :J 6 . T 7 53 文献标志码 : A
A e h d f r Ac u a y Ev l a i n o f r n e M a n M t o o c r c a u to f Re e e c p i
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
地磁匹配导航的精度分析作者:郑丽华来源:《数字技术与应用》2010年第07期[摘要]针对一种新的导航系统—地磁匹配导航的精度进行了研究。
在介绍了地磁匹配导航的基本原理的基础上,给出了地磁匹配系统的形式化模型。
分析了影响地磁匹配导航精度的决定因素,最后从硬件和软件2个方面给出了提高其定位精度的途径。
[关键词]地磁匹配导航精度惯性导航系统[中图分类号]V249.32 [文献标识码]A [文章编号]1007-9416(2010)07-0149-02Precision analysis of geomagnetic matching navigationZhen Li-hua(Chang qing Branch, oil city of Yin Chuanyin-chuan,750006)[ABSTRACT]The precision of a new navigation system—geomagnetic matching (GM) navigation was investigated. After the introduction of the basic principles of GM system, the formalized model of GM was given.Crucial factors affecting GM navigation precision was analyzed, and the ways, from the two aspects of hardware and software, to enhance the performance of GM navigation were proposed finally.[KEY WORDS]Geomagnetic matching; navigation precision; inertial navigation system1 引言地磁场是一个矢量场,是地球固有的公共资源,具有全天时、全天候、全地域的特征。
在地球近地空间内任意一点的磁场强度矢量具有唯一性,且与该点的经纬度一一对应,只要准确确定各点的地磁场矢量即可实现全球定位。
所谓地磁匹配GM(Geomagnetic Matching)导航,实质是由惯性导航系统(INS)、地磁传感器和地磁基准图等构成的组合导航,该系统的显著特点是能消除INS的累积误差,修正INS的导航系统,提高导航精度。
GM 系统作为一种新型导航系统之所以引起人们的广泛注意且日益受到关注[1~2],是因为地磁场是地球的固有磁场,具有全天时、全地域、全天候、良好的隐蔽性等特点的。
2 地磁匹配导航的原理及特点2.1 地磁匹配导航的原理地磁匹配系统硬件设备主要由以下几部分组成:INS、地磁传感器、地磁基准图以及解算计算机等。
其简化方块图如图1所示。
地磁匹配系统的工作原理:飞行器在飞越航线上某些特定的区域(地磁匹配区)时,利用地磁传感器测量飞行器的地磁强度值;同时根据惯性导航系统所输出的位置信息,从地磁基准图中某一区域内提取相应的数据信息。
利用匹配算法对地磁强度的实时测量值和基准图上的数据进行匹配获得最佳匹配位置,并利用位置信息校正惯性导航系统。
2.2 地磁匹配导航的特点(1)可与惯性导航系统组合使用,校正远程制导中的积累误差。
(2)可弥补巡航导弹现有中制导方式在跨平原、水域作战时存在的缺陷。
(3)可实现变轨制导,提高导弹的突防能力。
(4)属于被动制导,具有良好的隐蔽性和抗干扰性(如图1)。
3 地磁匹配导航的形式化模型由地磁匹配系统的原理知,地磁匹配模型可以形式化的描述如下:状态方程(INS误差模型):观测方程(观测模型):式中,表示时刻INS系统的定位误差,表示时刻INS误差的变化规律。
表示时刻飞行器的真实位置,表示时刻INS指示的飞行器的位置,表示位置处的地磁强度值,DTED是地磁基准图,表示地磁基准图中存储的位置处的地磁强度值,是时刻地磁传感器测量的地磁强度值。
是系统噪声,是地磁强度测量噪声,是地磁基准图的地磁强度值误差。
地磁匹配的目的是根据DTED,在获得已知信息的情况下,估算飞行器的位置坐标信息或者INS系统的位置误差。
把飞行器INS位置误差看作状态,地磁强度测量值看作观测量,这就是一个状态估计问题。
INS的位置误差是关于时间的非线性函数,实际地磁强度值是关于地理位置的非线性函数,所以,地磁匹配问题本质上是一个状态方程和观测方程都是非线性的状态估计问题。
4 地磁匹配导航的决定因素根据式-描述的地磁匹配问题的形式化模型,可以看出地磁匹配问题本质上是一个非线性状态估计问题,以下因素影响地磁匹配系统定位的精度。
4.1 地磁传感器的精度(2)式中地磁强度测量噪声越小,说明非线性估计中观测量误差越小。
观测量误差小,有助于改善非线性估计的结果,提高地磁匹配的精度。
地磁强度测量噪声的大小取决于地磁传感器的性能。
4.2 INS的误差INS是一种自主式导航系统,它完全依靠机载设备自主地完成导航任务,和外界不发生任何光、电联系,因此隐蔽性好,工作不受气象条件的限制。
因此在地磁匹配系统中,INS作为主导航系统,它的定位误差特性就决定了系统状态方程的特性。
状态方程的特性影响系统的可观测性,影响状态估计的结果。
4.3 地磁基准图的精度地磁匹配系统可行的前提是必须有所需要的符合质量要求的基准数据库,否则地磁匹配系统就不能得到正确的使用。
地磁基准图制备过程主要是把一幅相当于地面上某个区域的地图分成许多小方格,然后在其相应的小方格上记入地磁强度,结果就可以得到用数字形式表示地磁强度变化的数字阵列。
目前,能够用作地磁匹配基准图制备的地磁数据源主要有两个,一是实测数据,二是地磁模型。
相应地,制备基准图的方法也就主要有三种,分别是:(1)离散的实测数据,辅以合适网格化方法;(2)依据已有的地磁模型(世界地磁场模型WMM (world magnetic model ) 、IGRF( international geomagnetic reference field) ,局部区域模型等) 制备方法;(3)基于第一种方法与第二种相结合的制备方法。
相比之下,由于地磁模型所能够提供的数据误差较大,尤其是近地表使用时受到异常场的影响,导致所能提供数据误实测值误差较大,而第一种方法可根据需要进行适量密度的测量,能够达到较高的精度。
地磁基准图的误差主要产生在制作过程中,不同的地磁基准图制作方法会产生不同的误差源。
一般包括测量误差、判读误差和制图误差等。
根据式,地磁基准图的精度越高,式中越小,地磁基准图中的地磁强度值和实际的地磁强度值越接近,从而有助于改善地磁匹配定位的结果。
4.4 地磁匹配区的特性不同的地磁区域具有不同的地磁特征,地磁的特征参数是影响定位精度和匹配概率的重要因素,它主要包括地磁数据标准差、粗糙度和相关长度等,分别反映了地磁的总体起伏、平均光滑程度和地磁变化的快慢。
地磁特征对应于式(2)中函数的特性,不同的函数影响地磁匹配系统的可观测性,从而影响地磁匹配的结果。
通过优化飞行器的飞行航迹,选择适合于地磁匹配的区域,提高地磁匹配系统的导航精度。
4.5 地磁匹配方法地磁匹配方法的实质就是一种状态估计方法,不同的估计方法使用不同的估计准则,得到最优估计值也不相同。
近年来,地磁匹配形成了三种匹配方法:(1)类似于TERCOM系统的地磁轮廓匹配法[4-6],(2)类似于SITAN系统的信息融合法[7-8],(3)基于ICP算法的地磁等值线匹配方法[9-10]。
使用MSD算子的类似于TERCOM系统的地磁轮廓匹配法和基于ICP算法的地磁等值线匹配法的实质是最小二乘估计,最小二乘估计的缺点是没有考虑状态随机变量的统计特性。
类似于SITAN系统的信息融合法本质是把INS误差的变化规律和地磁线性化后使用线性最小方差估计,它用于地磁辅助导航匹配算法的缺点是地磁匹配问题本质是非线性状态估计问题,在初始位置误差较大和地磁斜率变化剧烈的区域线性近似误差较大,采用线性最小方差估计准则的类似于SITAN信息融合法给出的结果有可能发散。
5 提高地磁匹配导航精度的途径根据地磁匹配原理和地磁匹配系统形式化模型,在改善和提高地磁匹配系统定位的精度上我们可以从硬件和软件2个方面来着手。
5.1 硬件方法①使用高精度的惯性器件。
在地磁匹配系统中,INS是主导航系统,INS的导航精度直接影响地磁匹配系统的精度,因此采用高精度的惯性器件可以提高INS的导航精度,从而提高地磁匹配系统的导航精度。
②选用高精度的地磁传感器。
高精度的地磁传感器可以提高地磁匹配系统的地磁数据精度,从而可以得到更加接近真实值的实际地磁强度,减小地磁强度测量噪声,从而提高导航精度。
③制作高精度的地磁基准图。
地磁基准图是使用地磁匹配系统的前提,是地磁匹配系统的匹配依据。
而现在几种制作数字地图的基础都是需要高精度的测绘工具,测出高精度的地磁数据,以制作高精度的地磁基准图。
5.2 软件方法①研究高效、实时的匹配方法。
在地磁匹配系统各传感器性能、基准数字地图和飞行航线已经确定的情况下,地磁匹配方法决定了地磁匹配系统的精度。
研究高效、实时的匹配方法可以提高地磁匹配系统的性能。
②规划飞行航线选择合适的地磁匹配区。
地磁特征参数比较明显的区域通常比较适合做地磁匹配区。
地磁匹配区域的选择主要有4个步骤[1]:1)确定区域的大小;2)计算某个区域的特征参数;3)结合场传感器性能和载体运动姿态,判断此区域的匹配可行性;4)通过模拟仿真试验作最后选择。
6 结语本文就地磁匹配导航的定位精度为对象进行了综述和讨论,从地磁匹配导航的形式化模型出发,分析了影响地磁匹配导航精度的5个主要因素,并相应的从软硬件2个方面提出了提高导航精度的途径。
综上所述,使用高精度的硬件来提高导航精度会使整个系统的成本大大增加,而通过软件的方法来提高系统的性能则可令成本降低,这将是我们目前研究的重点方向。
[参考文献][1] Iwaki F,Kakihara M,Sasaki M. Recognition of vehicle’s location for navigation [CA].First Vehicle Navigation and Information Systems Conference-VNIS'89.1989,131~138.[2] Hamada Taisuke,Shigetomi Toshihide,Orimo Yohei,KatoNaoni. Study on underwater navigation system for long-range autonomous underwater vehicles using geomagnetic and bathymetric information [J].Proceedings of The Seventeenth 2007 International Offshore and Polar Engineering Conference,ISOPE 2007.1163~1168.[3] 谢仕民,李邦清,刘峰等.地磁匹配导航关键技术浅析[J].控制与制导,2008,2:35~38.[4] 赵建虎,王胜平,王爱学.一种改进型TERCOM 水下地磁匹配导航算法[J].武汉大学学报,信息科学版,2009,34(11): 1320~1323.[5] 刘飞,周贤高,杨晔等.相关地磁匹配定位技术[J].中国惯性技术学报,2007,15(1):59~62.[6] 刘颍,吴美平,胡小平等.基于等直线约束的地磁匹配方法[J].空间科学学报,2007,27(6):505~511.[7] 穆华,任治新,胡小平等.船用惯性/地磁导航系统信息融合策略与性能[J].中国惯性技术学报,2007,15(3):322~326.[8] 晏登洋,任建新,牛尔卓.惯性/地磁组合导航系统自适应卡尔曼滤波算法研究[J].电光与控制,2007,14(6):74~77.[9] 吴美平,刘颖,胡小平.ICP算法在地磁辅助导航中的应用[J].航天器控制,2007,25(6):17~21.[10]李豫泽,石志勇,杨云涛等.基于ICP算法的地磁匹配定位方法[J].科学计算及信息处理,2008,283(20):122~125.[11]周贤高,李士心,杨建林等.地磁匹配导航中的特征区域选取[J].中国惯性技术学报,2008,16(6):694~698.。