动作分析(中文)
(中文)动作经济原则

中华料理充分运 用了动作经济原则
合适的作业
最大作业区,手平伸能 触及到的最大的范围
最舒适的作业范围
正常作业区是以 手肘为支撑点能
触及的范围
最大作业区域
合理的作业区
正常作业区域 合理的作业区
动作经济的4大基本原则
动作经济的4大基本原则
写真
何谓作业速度
■何谓作业速度100% (评估1)? 标准速度(100%)是指,①一般程度的有经验的作业员
动作经济原则
前言
我们将令工厂的面貌焕然一新! 首先改变意识~然后改变工厂 ! 不要再维持现状,不要固步自封! 勇敢向前迈进吧! 『虽然适这个技术很先进,但是不适合XXX』 『无论方案A还是方案B,都不太适合XXX』 ・・・・・像这种言论一定要杜绝! 今后我们应该朝着『无论多么艰难,
我都绝不放弃!』的方向迈进!
何谓“工作”?
■工作=随同时间、“价值”也逐渐增加 ■一天的劳动时间=工作+动作
工作(价值)
■卖得掉(产生利润)
动作(浪费)
■卖不掉(不产生利润)
增值作业
■损失(损耗)
• 变形
• 变色
人・物
• 变质
设备・资本
=知推识动+力兴(改趣善+智能慧力必•) 须组装但无・・・附取检取部查放加件部价、件工值﹑具定作的信位业行息走移动
■P-Q分析
■生产线均衡分析
■产品工序分析
■作业员工序分析
■M-M分析 人机联合作业
■动作路线分析
降
■双手作业分析
低
■沙布利克分析
成
■ VTR分析(摄影法、动作记录分析)本
的
■搬运路径/灵活性分析
方 法
■记秒法 ■PTS法(WF、MTM法) ■评估
运动解剖学重点内容第三部分(动作分析)
运动解剖学重点内容
动力性动作分析----俯卧撑
1.动作阶段的划分:两上肢伸直,手和足支撑于地面,身体伸直俯卧成一直线,臀和腰不得塌陷或弓身,可分为上升阶段和下落阶段。
2.各阶段关节的运动,原动肌肌肉工作分析:
1)上升阶段:肩带前伸,前锯肌、胸小肌在近固定条件下完成动力性向心工作,
肩关节屈,肘关节伸,桡腕关节屈,则由胸大肌、肱三头肌、前臂屈指、屈腕肌在远固定条件下完成动力性向心工作。
2)下落阶段:肩带后缩、肩关节伸、肘关节屈、桡腕关节伸,上述各肌在远固
定条件下完成动力性离心工作。
在各阶段中,颈、腰、背、髋、膝保持伸直,踝关节背屈,是夹肌、腹直肌、腹外斜肌、腹内斜肌、髂腰肌、股四头肌、小腿三头肌完成静力性工作。
3.分析讨论
1)次练习可发展前锯肌、胸大肌、肱三头肌力量,训练夹肌、腹直肌、髂腰肌、股四头肌、小腿三头肌等的控制能力。
2)采用不同姿势加高手或足的支撑高度,调整手和足承担体重的比例就可减小或增大俯卧撑难度,以适应不同对象的需要
重点:以上动作分析为示例,各位童鞋
要学会去分析动作,要以以上的步骤去
分析,多看看书上动作分析,还不知道
要考哪个动作分析,做这个俯卧撑的只
是为了你们能够更好的去理解,然后依
靠自己的思维在考试的时候分析出题目
中的动作分析,希望大家能够努力,加
油!!!。
IE七大手法介绍
IE七大手法介绍一、什么是IEIE就是指Industrisal工业,Engineering工程,是由二个英文字母的前缀结合。
“IE”是应用科学及社会学的知识,以合理化、舒适化的途径来改善我们工作的品质及效率,以达到提高生产力,增进公司之利润,进而使公司能长期的生存发展,个人的前途也有寄托之所在。
因此,简单地说“IE”就是代表“合理化及改善”的意义,为了顾及记忆的方便,我们就以中文“改善”来代表“IE”的含义。
、改善(IE)七大手法手法名称简称(1)防止呆子法(Fool-Proof) 防呆法(2)动作改善法(动作经济原则) 动改法(3)流程程序法流程法(4)5X5WIH(5X5何法) 五五法(5)人机配合法(多动作法) 人机法(6)双手操作法双手法(7)工作抽查法抽查法三、七大手法的用途用途(1)防呆法如何避免做错事情,使工作第一次就做好的精神能够具体实现。
(2)动改法改善人体动作的方式,减少疲劳使工作更为舒适、更有效率,不要蛮干。
(3)流程法研究探讨牵涉到几个不同工作站或地点之流动关系,藉以发掘出可资改善的地方。
(4)五五法借着质问的技巧来发掘出改善的构想。
(5)人机法研究探讨操作人员与机器工作的过程,藉以掘出可资改善的地方。
(6)双手法研究人体双手在工作时的过程,藉以发掘出可资改善的地方。
(7)抽查法借着抽样观察的方法能很迅速有效地了解问题的真象。
四、改善(IE)七大手法与品管(QC)七大手法之差别“品管(QC)七手法”较着重于对问题的分析与重点的选择,但对如何加以改善则较少可应用。
“改善(IE)七手法”较着重于客观详尽了解问题之现象,以及改善方法的应用,以期达到改善的目标。
有了“改善(IE)七手法”正可弥补品管(QC)手法的缺陷而达到相辅相成之效果,使得改善的效果更为落实也更容易实现。
同时最重要的是改善(IE)七手法亦可单独使用,因其本身具有分析、发掘问题的技巧之故。
----------------------------------以下是收集来的各种IE七大手法版本:一、IE人员主要从事的七个方向,它们是:1.研究与开发管理;2.生产系统设计与控制;3.效率工程;4.质量控制与质量保证;5.实施规划与物流分析;6.工业卫生与安全;7.人力资源管理。
基于沙布利克的缝制作业动作分析
基于沙布利克的缝制作业动作分析朱月忠;袁惠芬;孙莉【摘要】Waste, futility and irrationality exist in the process of garment production. In order to solve the problems appearing in sewing and producing the garment this paper introduces the application of Therblig analysis to the practice of sewing and producing the garment: analyzing the movement and time in the process of the men’s shirts production, proposing the solutions to the problems in the process, sorting out and comparing the data collected. It has proved that the movement analysis can be carried out reasonably and comprehensively to regulate the sewing movement to some degree, which illustrates the great signifi-cance of Therblig in improving work efficiency.%服装生产过程中,许多缝纫工人的缝制作业动作都存在浪费、无效、不合理等现象。
为了解决缝制作业实际应用过程中出现的问题,首先介绍沙布利克分析在缝制作业中的应用,通过对男式衬衫领生产流水线各道工序的动作及时间加以分析,然后根据工序存在的问题提出解决方案,对收集到的数据进行整理和对比,从而让动作分析法实施起来更加合理及全面,并在一定程度上规范了缝制动作,以此证明沙布利克动作分析在提高工作效率中有显著作用。
IE手法之动作分析法

IE手法之动作分析动作分析⏹精益理论将动作分为三大类:⏹A,有价值必须的动作⏹B,无价值但必须的动作⏹C,无价值的浪费动作动作分析1.动作分析的意义2.动作分析的目的/意识3.动作分析的方法4.动素分析符号及改善要点5.动作经济的意义6.动作经济原则7.动作经济原则之检讨8.动作改善的原则动作分析法(Therblig)⏹一、动作分析的意义创始人:吉尔布雷斯夫妇(Frank B.Gilbreth)⏹动作分析是在程序决定后,研究人体各种动作的浪费(不合理、不平衡、不需要-3M),以寻求省力、省时、安全和最经济的动作。
其实质是研究人在进行各种操作的细微动作,删除无效动作,使操作简便有效,以提高工作效率。
⏹目的:发现操作人员的无效动作或浪费现象,简化操作方法,减少工作疲劳,降低劳动强度。
在此基础上制定标准的操作方法,为制定动作时间标准作技术准备。
以日常生活中的动作为例:一个熟练的厨师,可以同时用两个甚至更多的炉子炒菜,快速而且不会出差错。
而平常人则可能用一个炉子炒菜都会出现在中途发现某一种材料还未准备好的状况,所耗费的时间也更长。
究其原因,就是因为动作安排合理与否造成的。
何谓动作意识?⏹A,明白合理动作与不合理动作的区分;⏹B,明确动作错误的原因,判断合理动作;⏹C,全身心地投入动作研究,思考合理动作方法、作业配置和工夹具。
动作分析方法(共四种)⏹1、目视动作分析法:(visual motion study)采用目视观测方法寻求改进动作的方法。
⏹2、动素分析法:细分动作之构成要素,得18种动素,将工作中所用之各动素逐项分析,谋求改进。
一般用在较具重复性且周期较短的手操作之研究中。
18个动素(也称基本动作)。
动作分析方法⏹3、影片分析法:(film Analysis)采用摄影机将各个操作动作拍摄成影片放映,而加以分析。
例:将生产线上各个动作拍摄下来,然后放映加以分析。
影片分析因其拍摄速度之不同,又可分为细微动作研究(micro-motion study)及微速度动作研究(memo -motion study)两种。
RWF动作分析法
A B C D E
WORK FACTOR W1 W2 W3 -1.0 -1.5 -2.5 <2 <3 <5 <4 >4 <8 >8 <16 >16 3 4 5 5 6 7 7 9 11 9 11 13 11 13 15 握型
W >2.5 >5
4
机 械 组 立 面 组 立
目标物 寸法 10 -10 -3
注意:RWF时间表的动作要素时间不包括生理要求、疲劳等伴随操作发生的任 何不可避免的迟缓时间。没有宽裕时间存在。 但用RWF法制定的标准作业周期时间应考虑时间宽裕。
RWF时间表上的时间单位:Ru(Ready Time Unit)。
1Ru=0.001分钟=0.06秒
RWF的标准要素
所有的操作 都是由标准 要素组合而 成。 标准要素 WF记号 1、移动(到达、搬运)———————R、M 2、抓 ———————————————Gr 3、放 ———————————————Rl 4、前置 ——————————————PP 5、组立 ——————————————Asy 6、使用 ——————————————Use 7、分解 ——————————————Dsy 8、精神作用(检查等) ————————MP
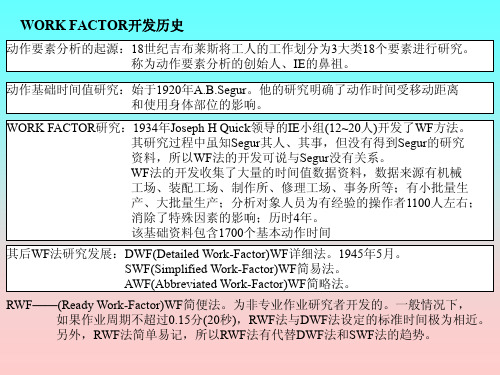
其后WF法研究发展:DWF(Detailed Work-Factor)WF详细法。1945年5月。 SWF(Simplified Work-Factor)WF简易法。 AWF(Abbreviated Work-Factor)WF简略法。 RWF——(Ready Work-Factor)WF简便法。为非专业作业研究者开发的。一般情况下, 如果作业周期不超过0.15分(20秒),RWF法与DWF法设定的标准时间极为相近。 另外,RWF法简单易记,所以RWF法有代替DWF法和SWF法的趋势。
第十二届全运会女子蹦床个人网上决赛成套动作分析

第十二届全运会女子蹦床个人网上决赛成套动作分析
陈彬
【期刊名称】《山西大同大学学报(自然科学版)》
【年(卷),期】2017(033)001
【摘要】通过文献资料、录像观察和数理统计等方法,对我国第十二届全运会女子蹦床个人网上决赛成套动作的起跳、飞行时间、技术、难度、位移减分和动作编排进行分析,旨在找出国内女子蹦床优秀运动员所存在的问题,进而提出相应的对策,为我国蹦床运动的发展提供参考性意见.
【总页数】3页(P79-81)
【作者】陈彬
【作者单位】山西大同大学煤炭工程学院,山西大同037003
【正文语种】中文
【中图分类】G838
【相关文献】
1.十运会蹦床(网上)决赛的女子单人成套动作分析 [J], 宛全利;赵建
2.优秀女子蹦床运动员网上个人决赛动作的难度选择与编排特征分析 [J], 冯本余;李东建
3.对优秀女子蹦床运动员网上个人决赛动作的难度选择与编排特征探析 [J], 伍顺璋
4.我国蹦床女子网上单人成套动作现状分析 [J], 赵建
5.当今世界男子蹦床网上个人成套动作的编排特征与趋向--第29届世界蹦床锦标赛分析 [J], 常宝芳;韩华
因版权原因,仅展示原文概要,查看原文内容请购买。
伦敦奥运会男子自由体操决赛动作分析
伦敦奥运会男子自由体操决赛动作分析
胡军
【期刊名称】《中国体育教练员》
【年(卷),期】2012(000)004
【摘要】第30届夏季奥运会体操比赛于2012年7月27—8月7日在英国伦敦
举行。
经过9天13场精彩纷呈的争夺,14枚金牌被9个国家瓜分,3个国家首
次获得奥运会体操项目金牌。
本文通过录像观察、专家访谈、对比分析等研究方法,从动作组别、动作难度、动作连接、落地稳定性和结束动作5个方面对伦敦奥运
会男子自由体操决赛运动员的动作进行统计分析,探讨世界男子自由体操动作发展的新方向,为我国运动员备战2016年奥运会提供参考。
【总页数】3页(P52-54)
【作者】胡军
【作者单位】天津体操队
【正文语种】中文
【中图分类】G832.1
【相关文献】
1.世界男子自由体操项目成套编排难度的比较与分析--以第30届伦敦奥运会、第17届仁川亚运会、第44届和第45届世界体操锦标赛为例 [J], 卢英杰;李翠玲
2.伦敦奥运会男子自由体操成套动作编排特征的研究 [J], 李春光;
3.2017年体操世锦赛男子自由体操决赛运动员动作编排的研究 [J], 杜家俊;孟永
翔
4.2017年体操世锦赛男子自由体操决赛运动员动作编排的研究 [J], 杜家俊;孟永翔;
5.2020年全国体操锦标赛男子自由体操决赛成套动作编排特征研究 [J], 廖英鹏;余文禄;郑海玲
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
©2005 Physicalsoft All rights reserved
③データチェック
大量の試技をデジタイズしていると、デジタイ ズポイントを間違えてクリックすることがある ので、デジタイズ後、デジタイズが間違ってい ないか、スティックピクチャなどの描画やグラ フで確認する。
2013/7/11
(X,Y)
原点補正:
原点位置を指定する場合は、計測座標値(U、V)から原点座標値 (U0、V0)を引く。(U’、V’)=(U.、V)-(U0、V0) 実長換算: デジタイズ座標(U,V)に原点補正した値にスケールを掛けて実長 を算出する。(X,Y)=(U’×kh、-V’ ×kv ) 3次元:省略
2013/7/11
身体部分慣性特性(BSP)=身体部分の質量、質量中心位置、慣性モーメントのこと
©2005 Physicalsoft All rights reserved
2013/7/11
②画像のデジタイジング
1.キャリブレーションデジタイズ
2次元: 画像の縦スケール(縦1ドットあたりの長さ) 画像の横スケール(横1ドットあたりの長さ)
④動作観察および分析
⑤患者および障害に応じた検査・計測の 結果 ⑥統合、解釈の要約
標準理学療法学:臨床実習とケーススタディ(医学書院)p75,76
⑦問題点 参考資料: ©2005 Physicalsoft All rights reserved
b. 理学療法経過記録
1)基本事項
①治療実施日(毎回、実施日に記録) ②治療実施時間(開始時間と終了時間) ③治療内容(治療方法、反応、考察など) ④記録者氏名
縦1ドットあたりの長さ=0.85(m)/190(dot)=0.0044736843…
横1ドットあたりの長さ=0.85(m)/210(dot)=0.00404761..
2013/7/11
©2005 Physicalsoft All rights reserved
⑤データの平滑化
3点移動平均 5点移動平均 バーターワース
補足:フレーム画像とフィールド画像
DVカメラ(NTSC)の解像度は縦480×横720ドット 奇数行(奇数行フィールド) 偶数行(偶数行フィールド)
480
720 1/60秒ごとに奇数行、偶数行を撮像(スキャン)する。
→偶数フィールド(1/60)+奇数フィールド(1/60)=1フレーム(1/30)
2013/7/11 ©2005 Physicalsoft All rights reserved
2013/7/11 ©2005 Physicalsoft All rights reserved
①-2:マーカー貼付
阿江らの身体モデル *手動デジタイズの場合は、左記ポイ
ントをデジタイズする際に参考にする 位置にマーカーを貼付する。(関節周 りにテープを巻いたり、複数の骨特 徴点にマークし、そこから関節中心を 目測でデジタイズする。)
2013/7/11
3)医学的情報
①診断名 ②主訴(シュソ)、ニーズ ③現病歴、主要症状
④既往歴
⑤家族歴 ⑥検査所見(X線所見、臨床検査データな ど) ⑦投薬内容
⑥診療報酬請求様式
2)一般的基本事項
⑧他部門の情報、その他
4)理学療法評価結果
①評価実施日 ②患者の印象、全体像 ③主訴、ニーズ ⑧短期・長期目標 ⑨治療方針、理学療法プロ グラム ⑩記録者氏名
*オートトラックを使用する場合は、分
析点に貼付する。分析点に貼付でき ない場合は、複数の補助マーカーを 貼付し、後処理で分析点座標を算出 する。(3次元の場合、マーカー位置 と関節中心位置が異なるので身体モ デルを構築する際は補正処理が必 要になる)
左図:スポーツバイオメカニクス20講P39
2013/7/11 ©2005 Physicalsoft All rights reserved
2013/7/11
参考資料:
©2005 Physicalsoft All rights reserved
標準理学療法学:臨床実習とケーススタディ(医学書院)p75,76
a. 初期評価記録
1)施設管理上の事項
①病歴番号(ID) ②保険の種類 ③病棟、病室 ④主治医、担当のコメディカルスタップ ⑤診断名 ①氏名 ②性別 ③生年月日(年齢) ④身長 ⑤体重 ④住所、電話番号 ⑤保険の種類 ⑥身体障害者手帳の有無 ⑦職業(勤務先)⑧家族構成⑨居住環 境、交通手段⑩趣味、その他 ⑪掲載 状態、⑫性格
マーカー位置に関する参考文献
■バイオメカニズム学会誌、河内まき子、Vol.26,No1(2002):口伝(くでん)-人体寸法・形状・運 動計測編、人体運動計測 -その1-p50-54 ■バイオメカニズム学会誌、河内まき子、Vol.26,No2(2002):口伝(くでん)-人体寸法・形状・運 動計測編, 人体運動計測 -その2-p107-111 ■バイオメカニズム学会誌、持丸正明、Vol.27,No1(2003):口伝(くでん)-人体寸法・形状・運 動計測、第3回 人体運動計測 -その1-p43-46 上記3つはhttp://ci.nii.ac.jp/vol_issue/nels/AN00334047_jp.htmlよりダウンロード可 ■BSP関連:独立行政法人 産業技術総合研究所 デジタルヒューマン研究センターの人体特 性文献データベースよりhttp://www.dh.aist.go.jp/bodyDB/m/index.html ■マーカー位置と関節中心の推定 ボディダイナミクス入門、片麻痺者の歩行と短下肢装具、山本澄子、江原義弘、荻原章由、溝部 朊文著、医歯薬出版株式会社、p5-7,p169-170
(位置、変位、速度、加速度) (角度、角速度、角加速度) ⑩規格化・平均化手法
⑧Kinetics (力、運動量など) (トルク、角運動量など) (力学的エネルギー、仕事など) ⑬コンピュータシミュレーション
(⑫-2)筋電図法、
ゴニオメトリー法など 2013/7/11
⑨ディスプレイ(コンピュータグラフィックス、VTRなど) ©2005 Physicalsoft All rights reserved
参考資料: ©2005 Physicalsoft All rights reserved 標準理学療法学:臨床実習とケーススタディ(医学書院)p75,76
2013/7/11
動作解析で必要な被験者情報
阿江らの身体部分慣性特性を用いる場合 *性別(必須) *年齢(必須) *身長(推定式を用いる場合) *体重(推定式を用いる場合) *セグメント長(身体部分長) (デジタイズデータより算出)
2013/7/11
©2005 Physicalsoft All rights reserved
被験者(患者)情報
理学療法診療記録の記載内容
1)施設管理上の事項 2)一般的基本事項 3)医学的情報 4)理学療法評価結果
a. 初期評価記録
b. 理学療法経過記録
1)基本事項 2)再評価記録
c. 最終時(退院時)記録
参考:POSによる診療記録
POS=問題指向型システム(Problem Oriented System)
患者の問題点を医療スタップ全員が患者の全体像を捕らえ、合理的プランで治療を行うこ とをめざす。 Weed(ウィード)により提唱
問題指向型診療記録(Problem Oriented Medical Record=POMR)
遮断周波数の決定方法(残差解析法)
2013/7/11
©2005 Physicalsoft All rights reserved
3点移動平均
1 DS t Dt 1 2 Dt Dt 1 4
W
①映像/VTR撮影
①-1:カメラ設定
L
カメラ 図1-1 : 2次元撮影概要図 ©physicalsoft
1.シャッタースピード(スポーツモード、または、画面が暗くならない程度でできるだけ高速) 2.カメラスピード(フィルムスピード)の確認(DVカメラは1/30fps)( fps = フレーム毎秒 ) 3.カメラと被写体(被験者)の距離(設置可能な最大距離をとる) 4.キャリブレーション撮影を忘れない(既知の長さのオブジェクトを水平、垂直方向2つ撮影) 5.画角(視野角)を広げすぎない(動作解析には5m以内) 6.オートフォーカスはOFF 7. デモモードのOFF 8. 3脚で固定し、撮影中は動かさない。 9. ズームも変更しない。 10. 試技内容がわかるように、試技版(試技内容を表わすID番号版)を写しこむか、音声で入れる
①映像/VTR摄影 ②画像的digitizing(手动有的在自动) ③核对数据 ④2维/3维实在对坐标的换算(实长换算) ⑤数据的平衡化(频率分析,数字过滤器—,自动平衡化手法等)
(⑥-1)身体部分惯性系 数(质量,重心位置,惯性力矩)
⑥部分/全身重心的算出 ⑦Kinematics
⑫其他的测量 force平台法 座標変換 (FP系→作業系へ) (⑫-1)
Ver1.0.2:
2005.12.23修正版
动作分析的流程
把照相机映像作为中心的动作分析
2013/7/11
©2005 Physicalsoft All rights reserved
参考資料:スポーツバイオメカニクス20講P6の図を改変
动作分析工作流图
⑪坐标系的决定 (⑪-1)测量坐标系 (⑪-2)段坐标系
オートトラッキングの注意点
■誤認識を防ぐために、背景と試験者の衣類(タイツ) を黒系にし、白系のマーカーをつける (逆に白系の背景と衣類(タイツ)に黒系のマーカーを 付ける。 ■隠れ区間は手動でデジタイズか後処理で補間する。 ■マーカー同士が重なってカメラに写る場合は、その 区間はHale Waihona Puke 動で行う。2013/7/11