SEW伺服程序下载步骤
LENZE9300伦茨伺服器参数上传下载教程

1.0 目的:通过介绍可以对伦茨伺服器参数进行上传和下载。
2.0 要下载伦茨伺服器参数,必须先安装伦茨软件GDC。
这里介绍适合我们公司使用的2种连接下载方式。
2.1 这是伦茨软件安装好后打开的样子。
(公司内有一张伦茨软件正版光盘并有序列号)3.0 第一种连接下载方式:采用了“Ethernet CAN 2180”转换器进行连接,连接到中控的服务器电脑上3.1在三楼服务器中退出WINCC,就可以看见桌面上的“GDC图标”进入后在接设置里选择(如已经设置好连接方式,这个步骤可跳过)3.2 当该设定完成后,按F2键或,则会根据选定端口类型出现以下的Search drives 对话框;在此你可以点击Search选择寻找控制器;或点击Offline进入离线状态。
如果你之前的设置都正确的话,你将找到伺服器,并可以在线连接。
连接好后就可以进行参数的读取,上传,下载。
需注意的是,新伺服器的地址为1,通过参数C0350修改。
3.3 这里是对应的热键和热键的作用说明:我们普通使用时只要用到在线,离线,F5(下载),F7(上载)。
3.4 这时候他会自动寻找,寻找到3个地址,3,6,9。
你可以选择其中一个进入。
3和6是纵向的2台伺服器,9是横向的一台伺服器。
你可以通过内的“Communication parameter”进行修改地址,并进行再次读取。
3.5 你也可以在“Drive parameters”内选择这个选项是将原来做好的参数备份读取出来。
服务器中,参数备份路径分别为1线:F:\beifen1xian 2线:F:\beifen2xian 3线:F:\lunci3xianbeifen根据路径选择备份的程序按OK打开备份的程序3.6 当你找到合适的参数后,想将参数写入伺服器,就可以选择“Drive parameters”内选择这时候就可以将参数写入了。
3.7+ 这时它会提示你:写入参数后伺服器重新启动。
这时候,伺服器就可以正常使用了。
SEW MOVIDRIVE MDX61B调试步骤同步伺服(binary setpoint)

9、选择“Execute complete start-up(执行完整的初始化)”;
10、选择“Stand-alone motor > Vector-controlled/Servo(独立电机 > 矢量 控制/伺服电机)”;
11、参照电机铭牌,检查电机及编码器信息是否准确;
12、检查电机类型信息;
47、可选择“project > save(as)”,保存项目;
48、可选择“project > export”,导出项目到压缩文件;
49、若后期设备应用有更改,需初始化控制器,可在“parameter tree”P802中选择“delivery state”,将控制器还原为出厂状态。
4、定义硬件名称,点击“finish”开始硬件配置;
5、硬件配置中;
6、硬件配置完成后,去除控制器X13/DIΦΦ“控制器禁止”端子的二进 制输入,然后点击“startup”;
7、点击“perform startup”,开始初始化;
8、点击“startup set-1”,进行parameter set-1设置( 如果需要两套参数 运行,parameter set-2设置采取同样步骤);
SEW MOVIDRIVE MDX61B调试步骤
(binary setpoint)
WEISS-CHINA
2014/05
1、打开MOVITOOLS MotionStudio软件,创建项目;
2、用USB11A连接电脑和MDX61B控制器的XT插槽,扫描网络上的设备;
3、选择“configure device”,对连接到的设备进行硬件配置;
21、点击“完成”,将初始化信息下载至控制器。如需配置parameter set-2,点击“download”,再进行参数包示框,点击“确定”;
SEW变频器程序修改方法
SEW变频器操作一、下载及上传方法:安装MOVITOOLS变频器程序编辑软件,目前安装的是V4.9版本。
运行MT-Manager,进入MANAGER画面,语言选择English,波特率为9.6KB,驱动类型选择Movidrive,连接方式(注意:直接连变频器选Inverter With Address,地址默认0;如果打开离线文件,选No Inverter)选Inverter With Address。
将SEW变频器连接器插入变频器,COM连接线连接上变频器与电脑,MANAGER 画面选择Update更新,选择出现的变频器编码,点击Shell,出现该变频器的程序界面(SHELL MOVITOOLS),选择屏幕上方的按钮,出现Copy Unit data数据传输界面,如果选择程序上传至电脑,From…中选择Inverter(Peer-to-peer中无需打对勾),To…中选择File,可重新选择路径和命名文件名;如果选择将电脑中的程序下载至变频器,From…中选择File,To…中选择Inverter。
二、离线修改参数:MANAGER中连接方式选择No Inverter,点击Shell,出现一个空的程序界面(SHELL MOVITOOLS),选择File—Open菜单打开需修改的程序,选择Startup-Startup菜单,打开参数设定界面,可按Start-up Set往下设定。
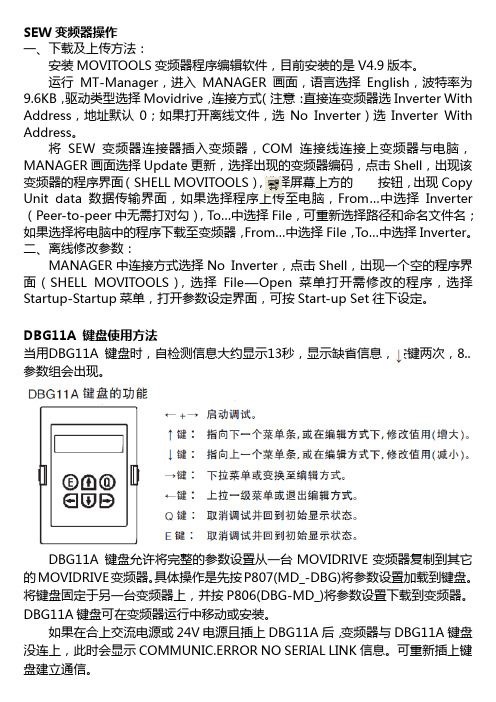
DBG11A 键盘使用方法当用DBG11A 键盘时,自检测信息大约显示13秒,显示缺省信息,按键两次,8..参数组会出现。
DBG11A 键盘允许将完整的参数设置从一台MOVIDRIVE变频器复制到其它的MOVIDRIVE变频器。
具体操作是先按P807(MD_-DBG)将参数设置加载到键盘。
将键盘固定于另一台变频器上,并按P806(DBG-MD_)将参数设置下载到变频器。
DBG11A 键盘可在变频器运行中移动或安装。
如果在合上交流电源或24V电源且插上DBG11A后,变频器与DBG11A键盘没连上,此时会显示COMMUNIC.ERROR NO SERIAL LINK信息。
SEW MC07B变频器参数上传及下载

1.运行“MotionStudio ”软件,从电脑开始菜单
“Programs ”--“SEW ”--“MOVITOOLS-MotionStudio ”--“MOVITOOLS-MotionStudio ”打开0.准备:用通讯线缆将变频器与PC 连接
SEW 变频器参数上传及下载
2.选择“New project ”新建项目,点“OK ”,输入项
目名称,选择保存路径。
3.选择“Configure communication connections ”设置通讯
接口
选择“Edit”编辑通讯接口,在弹出的对话框中如下图,选择对应的“COM port”即COM口,由于用USB电缆连接,故选择
USB”,点“OK”,弹出对话框,选“Yes”确认更改通讯接
5.选择“Start network scan”开启网络扫描。
扫描中,在底部有状态显示。
在左侧选中扫描出的变频器,鼠标右键选择“Manage unit parameter set”装置参数设定管理。
下载参数到变频器选择“Download”,上传参数到PC选Upload”
在弹出的对话框中填写保存名称,选择保存路径等。
下图为上传参数状态图,进度条完成,可电击OK
The End!。
西门子V90伺服驱动器参数下载步骤
西门子V90伺服驱动器参数下载步骤
打开V-ASSISTANT后,会弹出在线/离线模式选择窗口,如果已连接伺服驱动器,可以选择在线,之后软件会自动从驱动器中读出所有的参数,修改后可以保存或再次下载;如果暂时没有连接伺服驱动器或者已有工程文件,则选择离线,离线模式需要新建一个工程或打开已有工程,下面介绍一下下载已有工程的步骤。
第一步:
打开V-ASSISTANT伺服调试软件->在弹出的“选择工作模式”窗口选择“离线”->点击“打开已有工程”->点击“确定”
第二步:
在弹出的文件选择窗口中选择待下载的V90参数工程文件->点击“打开”
第三步:
在任务导航窗口选择:设置参数>查看所有参数,修改相关的参数,一般包括:控制模式、回参考点模式、PZD报文格式选择、电机抱闸配置等;
第四步:
使用MICRO-USB数据线连接电脑和V90伺服驱动器->点击V-ASSISTANT软件菜单栏上的“切换到在线模式”按钮
第五步:
若V90驱动器连接成功,会在弹出的窗口中显示出驱动器的相关参数->点击“确定”
第六步:
弹出“是否保存工程文件”提示窗口->点击“否”
第七步:
V-ASSISTANT会读取并比较V90驱动器中参数和工程文件中参数的区别,此步骤需要20s左右时间,等待参数读取完成
第八步:
在弹出的“参数比较”窗口中列出了驱动器和工程文件中参数的
区别,由于我们是要将工程文件下载到驱动器中,所以点击“电脑到驱动”,等待下载完成
第九步:
点击V-ASSISTANT软件菜单栏上的“保存参数到ROM”按钮,等待操作完成,至此V90伺服驱动器的参数下载已完成。
斯沃数控下载连接及破解方法

/download/sscnc6.05setup.exe下载WinHexWinHex用来破解WinHex 是一款以通用的16 进制编辑器为核心,专门用来对付计算机取证、数据恢复、低级数据处理、以及IT 安全性、各种日常紧急情况的高级工具: 用来检查和修复各种文件、恢复删除文件、硬盘损坏、数码相机卡损坏造成的数据丢失等。
得到ZDNet Software Library 五星级最高评价,拥有强大的系统效用。
功能包括(依照授权类型): ∙硬盘, 软盘, CD-ROM 和DVD, ZIP, Smart Media, Compact Flash, 等磁盘编辑器... ∙支持FAT, NTFS, Ext2/3, ReiserFS, Reiser4, UFS, CDFS, UDF 文件系统∙支持对磁盘阵列RAID 系统和动态磁盘的重组、分析和数据恢复∙多种数据恢复技术∙可分析RAW 格式原始数据镜像文件中的完整目录结构,支持分段保存的镜像文件∙数据解释器, 已知20 种数据类型∙使用模板编辑数据结构(例如: 修复分区表/引导扇区) ∙连接和分割、以奇数偶数字节或字的方式合并、分解文件∙分析和比较文件∙搜索和替换功能尤其灵活∙磁盘克隆(可在DOS 环境下使用X-Ways Replica) ∙驱动器镜像和备份(可选压缩或分割成650 MB 的档案) ∙程序接口(API) 和脚本∙256 位AES 加密, 校验和, CRC32, 哈希算法(MD5, SHA-1, ...)∙数据擦除功能,可彻底清除存储介质中残留数据∙可导入剪贴板所有格式数据, 包括ASCII、16 进制数据∙可进行2 进制、16 进制ASCII, Intel 16 进制, 和Motorola S 转换∙字符集: ANSI ASCII, IBM ASCII, EBCDIC, (Unicode) ∙即时窗口切换、打印、生成随机数字∙支持打开大于 4 GB 的文件,非常快速,容易使用。
SEW变频器软件应用

拷贝至变频器中 点击“Start” 将参数下载至变频器中
SEW变频器
SEW变频器
具体参数的相关说明,详见:Sew_MDX60B 61B变频器操作手册
SEW变频器
刷新/取消按钮
当电脑搜索到所连变频器后,点击Compiler按钮,进入编程界面
SEW变频器
SEW变频器
3、故障列表分析
故障代 码 说明 响应 可能的故障原因 措施
• 启动 MOVITOOLS程序。
SEW变频器
语言选择英文 接口选择USB 选择点对点连接
选择通讯速度
软件版本:
MOVITOOLS_V4.90
选择变频器型号
SEW变频器
刷新/取消按钮
当电脑搜索到所连变频器后,点击Shell按钮,进入参数界面
SEW变频器
SEW变频器
从电脑文件中拷贝 参数保存的路径
F14
编码器
立即关闭
SEW变频器
故障代码的相关说明,详见:Sew_MDX60B 61B变频器操作手册
ቤተ መጻሕፍቲ ባይዱ
F08
n 速度监控
立即关闭
• 减小载荷 • 增加设置的减速时间 (P501 、P503)。 •转速控制器及电流控制器 ( 在无编码器 • 检查编码器接线,必要时以双对形式交 的 VFC 运行方式下 ) 由于机械过载或者 换 A/A 和B/B 电源或电机的相位故障在设定极限中工作。 • 检查编码器供电系统 • 编码器连接错误或旋转方向错误。 • 检查电流限制 • 力矩控制时 nmax 超限。 • 必要时延长斜坡 • 检查线路和电机 • 检查电源相位 • 编码器线或屏蔽线连接错误。 • 编码器线短路 / 断线 • 编码器损坏 检查编码器电缆和屏蔽线连接是否正确, 检查短路和断线。
SEW伺服程序下载步骤教程文件
S E W伺服程序下载步骤伺服程序下载步骤一.首先完成主电路和控制部分接线,完成上电测试,上电变频器七段数码管显示1。
二.在使用相同的伺服电机且有备份程序情况下,可选择传输备份程序。
1.打开软件MT-manage.2.联机,见图片。
选择PC interface:COM7(USB),Update.出现电机型号后,可终止Update。
3.点击shell.出现下面图面。
4.选择copy unit data,出现下面画面。
在上面from…选择我们的备份程序,在下面to…选择inverter.然后点击start按钮。
5.程序传输完成后,启动程序(start)或点击闪电图标。
三.没有备份程序,可进行初始化操作+下载IPOS程序。
初始化操作如下:1.点击start-up.出现下面画面。
注意控制器和马达的型号和参数。
2.点击Start-up Set 1.出现下面画面。
3.选择Execute complete start-up.点击“下一步”按钮。
出现下面画面。
4注意马达型号和其他参数。
点击“下一步”。
出现下面画面5.选择“下一步”出现下面画面。
6.选择Positioning with IPOS.点击“下一步”。
出现下面画面。
7.Load inertia 选择电机带动负载重量(工程经验值J0 motor 参数的5-8倍)。
选择完后,点击“下一步”,出现下面画面。
8.设置电流极限值(200℅)、转速监视时间(1S)。
.再点击“下一步’,出现下一画面。
9.控制器参数接受建议值,点击”Apply proposal”.再点击“下一步’,出现下一画面。
10.可使用参考值,点击”Apply proposal”.但是100和101参数须改为fieldbus,再点击“下一步’,出现download 画面。
11.点击download,把参数下载下去。
12.打开软件。
参数6。
Terminal assignment设置参照实际输入输出。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
伺服程序下载步骤
一.首先完成主电路和控制部分接线,完成上电测试,上电变频器七段数码管显示1。
二.在使用相同的伺服电机且有备份程序情况下,可选择传输备份程序。
1.打开软件MT-manage.
2.联机,见图片。
选择PC interface:COM7(USB),Update.出现电机型号后,可终止Update。
3.点击shell.出现下面图面。
4.选择copy unit data,出现下面画面。
在上面from…选择我们的备份程序,在下面to…选择inverter.然后点击start按钮。
5.程序传输完成后,启动程序(start)或点击闪电图标。
三.没有备份程序,可进行初始化操作+下载IPOS程序。
初始化操作如下:
1.点击start-up.出现下面画面。
注意控制器和马达的型号和参数。
2.点击Start-up Set 1.出现下面画面。
3.选择Execute complete start-up.点击“下一步”按钮。
出现下面画面。
4注意马达型号和其他参数。
点击“下一步”。
出现下面画面5.选择“下一步”出现下面画面。
6.选择Positioning with IPOS.点击“下一步”。
出现下面画面。
7.Load inertia 选择电机带动负载重量(工程经验值J0 motor 参数的5-8倍)。
选择完后,点击“下一步”,出现下面画面。
8.设置电流极限值(200℅)、转速监视时间(1S)。
.再点击“下一步’,出现下一画面。
9.控制器参数接受建议值,点击”Apply proposal”.再点击“下一步’,出现下一画面。
10.可使用参考值,点击”Apply proposal”.但是100和101参数须改为fieldbus,再点击“下一步’,出现download 画面。
11.点击download,把参数下载下去。
12.打开软件。
参数6。
Terminal assignment设置参照实际输入输出。
参数870-876设置可参考下面
执行下载然后点击“start”按钮或闪电标记。
13.选择手动操作,验证控制器和电机接线是否正确;刹车是否正常释放;机械是否卡堵或过载。
在进行手动操作测试前,要保证DI00=1 即X13 的第1 个端子要有24VDC 。
14.IPOS程序下载方法:
打开软件,与控制器连接上。
打开“机器人夹具最终。
IPC”。