基于OpenCV的CCD摄像机标定方法_雷铭哲_孙少杰_陈晋良_陶磊_魏坤
一种基于OpenCV的摄像机标定算法的研究与实现
一种基于OpenCV的摄像机标定算法的研究与实现作者:孙昆穆森邱桂苹赵倩来源:《电子世界》2012年第14期【摘要】摄像机标定是计算机视觉中的一个重要问题。
本文介绍了标定的基本原理,详尽阐述了使用二维模板的标定算法,重点分析了如何借助开源软件OpenCV实现该算法。
实验结果显示,使用OpenCV中的相关函数,可以方便地进行数学计算,简单有效地完成摄像机标定。
【关键词】摄像机标定;内部参数;单应性矩阵;OpenCV1.引言计算机视觉的基本任务之一是从摄像机获取的图像信息出发计算三维空间中物体的几何信息,并由此重建和识别物体。
而空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系是由摄像机成像的几何模型决定的,这些几何模型参数就是摄像机参数。
摄像机标定是确定摄像机内外参数的一个过程,其中内参数的标定是指确定摄像机固有的、与位置参数无关的内部几何与光学参数,包括图像中心坐标(也称主点坐标)、图像纵横比、相机的有效焦距和透镜的畸变失真系数等;外参数的标定是确定摄像机坐标系相对某一世界坐标系的三维位置和方向关系。
目前,摄像机标定技术主要有两种实现方法:(1)基于标定物的方法:需要尺寸已知的标定参照物,通过建立标定物上三维坐标已知点与其图像点之间的对应,利用一定的算法获得摄像机的内外参数。
标定物可以是三维的,也可以是二维共面的。
三维标定物条件下,只需一幅图像就可以求出摄像机的全部内外参数。
但三维标定物的加工和维护比较困难。
二维共面标定物加工维护简单,但一幅图像不足以标出所有的摄像机参数,因此需要简化摄像机模型,或者从不同角度获取多幅图像来同时标出所有的参数。
当应用场合要求的精度很高而且摄像机的参数不经常变化时,这种标定法应为首选。
(2)自标定法:不需要标定物,仅依靠多幅图像对应点之间的关系直接进行标定。
利用了摄像机内部参数自身的约束,而与场景和摄像机运动无关。
该方法非常灵活,但不是很成熟,由于未知参数太多,很难得到稳定的结果。
一种基于OpenCV的简易摄像机标定方法
图像像素坐标系, 该坐标系的单位是像素 , 坐标原点 0 在图像的左上角。由于 ( 只表示像素位于数 。 , ) 组中的列数与行数, 并没有用物理单位表示出该像 素在 图像 中的位置, 因此, 需要再建立 以物理单位 ( 毫米 ) 表示 的图像坐标系 , 如图 l 所示 , Y 是图 ( ) , 像物理坐标 , 光心 0 在图像的中心点上 。
图 1 图像坐标系
由图 1 可得, 图像中任意一个像素在两个坐标
系下 的坐标 有 如下 的关 系 :
=
孚+ ‰
() 1
() 2
用齐 次坐标 与矩 阵表示为 :
1 O
u。
图 3 摄 像 机模 型
图 3 0为摄像机光心 , 中, 0 为图像坐标原点 ,
() 3
①读取 实验所 需 的图像 。
②使用 cF d hs orCr r 函数提取棋盘 vi C e ba o e n s d ns
模 板上 的角点 。
1y ,) k, +, + p( )) 2l ] 6( Y :z( ,) [23 , +p y x ) +2 x
() 7
③使用 cFnC r r b i vi o e uP d n S x函数对上步 中所提 取 出来的角点进行进一步的细化, 以得到更精确 的 角 点位 置 。 ④亚像素精确化后, 再使用 cDa C e ba — v r hs or w s d
界坐 标 系。
收 稿 E期 :2 1 0 t 0 1— 7—0 4
取三维空间信息的前提和基础。标定结果的好坏直
接影 响 着 三 维 测 量 的 精 度 和 三 维 重 建 结 果 的 好 坏H , 因此研究 摄像 机 标定 方 法 具有 重 要 的理 论 意 义 和实 际应用 价值 。
基于OpenCV的摄像机标定方法的实现
空间物 体表 面某 点 的三 维几何位 置 与其在 图
标定 法而 言 , 摄像 机标 定法 标定 结果稳 定 , 传统 精 度 较高 . 摄 像机 方 位 、 在 焦距 固定 不 变 的情况 下 , 往往 采用传 统摄像 机标 定法 . 开放 源代码 的计 算 机 视觉 类 库 ( pnSuc O e ore
M e h d o m e a Ca i r to s d o t o n Ca r lb a i n Ba e n Ope CV n
W ANG is e Ba— h ng,GAO u— a Yo nin,S HEN e —h n W nz o g
(colfEetc o e a dA t ai n i e n , h n hi n e i Sho o l r P w r n uo tnE gn r g S ag a i rt o ci m o ei U v sy f
第2 6卷 第 4期
上 海 电 力 学 院 学
报
Vo . 6, No 4 12 . Au . 2 1 g 0 0
21 0 0年 8月
J u n l o S a g a Un v r i o E e ti Po r o r a f hn hi i e st y f l crc we
位于俄 罗斯 的研究 实 验室 开 发 , 一 套 可免 费获 是 得 的 由一些 C函数和 c+ 类 所组 成 的库 , 来实 + 用 现 一些 常用 的图 像处 理 及 计 算 机 视 觉算 法 , 实 可
基于OpenCV的改进两步法摄像机标定
5f2i - 1
5ξj 5f2 i
= 1 pi T 0T - ui pi T m zi 0T pi T - vi pi T
5ξj
其中 m 是投影矩阵中的 12维实数向量 , m 是 ξ的 Jacobian矩
阵 ,式中的具体参数的值是由样本点决定 , m 取决于摄像机的
内外参数 ,需旋转矩阵 R 的显式表达 。
1. 2 二步法标定及其改进
两步法 [2, 6 ]是 Tsai提出 ,在其标定过程中 ,需要求取外参和 内参 ( f, k, sx , , Rx , Ry , Rz , Tx , Ty , Tz ) 共 9 个 。对该标定法的改 进 ,是在已经求得的摄像机参数值基础上 ,用非线性优化算法对 所有参数进一步优化 ,得到最终参数值 。
李健等 :基于 0penCV 的改进两步法摄像机标定
105
其中 : Rd 2 为径向半径的平方 , k为径向畸变系数 。 (4) 计算机图像 (帧存 )坐标到实际图像平面坐标的变换 : xd = sx ×( u - uo ) / s yd = sy ×( v - vo )
其中 : sx , sy 分别为相机敏光阵列元素的列间距和行间距 , S 是 水平比例因子 ,它是 N fx 与 N cx 比值 。
其中 ,旋转矩阵 R 为 3 ×3 的正交矩阵 , 平移矩阵 T 为三维列
向量 。
(2) 根据图中的三角形相似原理 ,可得到在针孔模型下的
理想透视投影变换 :
xu = f ×xC / zC yu = f ×yC / zC (3) 用于描述图像坐标系中实际图像坐标 ( xd , yd )与理想 图像坐标 ( xu , yu ) , 之间的变换 。考虑到一阶径向畸变 , 表达 式为 :
基于OpenCV摄像机标定研究
基于OpenCV的摄像机标定研究摘要:根据摄像机标定原理,实现了vc 2010环境下基于opencv 的摄像机标定系统。
该系统以棋盘格标定板图像作为输入,计算出了摄像机的各内外参数及畸变系数。
通过图像矫正实验证明了系统的有效性。
关键词:摄像机标定;棋盘格;opencv;图像矫正中图分类号:tp391.41 文献标识码:a文章编号:1007-9599 (2013) 05-0000-021引言视觉测量、三维重建等是计算机视觉应用中较为重要的研究领域。
在这些研究中,都需要确定视觉图像中的点与现实世界中对应点的几何位置关系。
我们常用的图像,由摄像机拍摄得到,因此,确定这种关系,就要依靠成像系统即摄像机的几何模型。
几何模型的参数就是摄像机的参数。
但这些参数不能够直接获取,而是要利用摄像机拍摄的图像,通过实验来获取。
获取这些参数的过程我们称之为摄像机标定。
摄像机标定是计算机视觉应用中的关键技术。
摄像机标定精度直接影响视觉测量精度,也是做好立体图像匹配与三维重建工作的基础[1]。
摄像机标定方法有3类:基于标定物的方法,自标定方法和基于主动视觉的标定方法[2,3]。
其中,使用平面标定物的标定方法[4],因其标定物制作简单、标定方法灵活而广泛使用。
本文详细介绍了摄像机标定原理,及在vc++ 2010环境下,利用opencv 2.4.4实现摄像机标定的方法和步骤,并通过实验验证了其有效性。
2标定原理摄像机标定首先需要利用合适的数学工具来描述和表达空间中的点与图像中对应点之间的关系。
这个工具就是几何模型,它涉及到摄像机的光学参数如图像中心、镜头焦距和镜头畸变等,还涉及到摄像机坐标系与世界坐标系的相对位置和方位等。
常用的针孔模型是一种理想的成像模型,没有考虑摄像机透镜的厚度及畸变对成像的影响,不能很好地反映实际情况。
opencv中的标定算法,其摄像机模型以针孔模型为基础,同时考虑了透镜的径向畸变和切向畸变,引入了径向畸变和切向畸变两个参数。
基于OpenCV改进的摄像机标定法
K e y Wo r d s c a me r a mo d e l ,l e n s d i s t o r t i o n,Op e n CV,c a me r a c a l i b r a t i o n Cl a s s Nu mb e r TP3 9 】
W ANG Ch a n g y u a n HOU J i n g
( Xi ’ a n Te c h n o l o g i c a 1 Un i v e r s i t y.Xi ’ a n 7 1 0 0 2 1 )
Ab s t r a c t Fo r t h e f i e l d o f c o mp u t e r v i s i o n c a me r a c a l i b r a t i o n ,t a k i n g i n t o a c c o u n t d i s t o r t i o n o n c a l i b r a t i o n a c c u r a c y,t h e o p e n c o mp u t e r v i s i o n l i b r a r y Op e n C V a n d c a me r a mo d e l a r e i n t r o d u c e d,c a me r a c a l i b r a t i o n a l g o r i t h m b a s e d o n t h e Op e n CV i s g i v e n . Th e a l g o r i t h m ma k e s f u l l u s e o f t h e Op e n C V l i b r a r y f u n c t i o n,wi t h h i g h c a l i b r a t i o n a c c u r a c y a n d c o mp u t a t i o n a l e f f i — c i e n c y ,a n d c a n me e t t h e n e e d s o f s t e r e o v i s i o n s y s t e m.
opencv的相机标定方法

(原创实用版4篇)编制人员:_______________审核人员:_______________审批人员:_______________编制单位:_______________编制时间:____年___月___日序言下面是本店铺为大家精心编写的4篇《opencv的相机标定方法》,供大家借鉴与参考。
下载后,可根据实际需要进行调整和使用,希望能够帮助到大家,谢射!(4篇)《opencv的相机标定方法》篇1相机标定是计算机视觉中一个重要的问题,它的目的是确定相机的内部参数和外部参数。
在 OpenCV 中,可以使用 cv::calibrateCamera() 函数进行相机标定。
该函数需要输入标定板的角点坐标和相机拍摄到的图像,然后可以计算出相机的内部参数(如焦距、主点坐标等)和外部参数(如相机的旋转和平移矩阵)。
具体地,相机标定的过程可以分为以下几个步骤:1. 准备标定板:标定板应该是一个平面板,上面有一些精确的几何形状(如圆形或棋盘格),以便于在图像中进行角点检测。
2. 拍摄标定板:使用相机拍摄标定板,并获取相机的内部参数和外部参数。
3. 角点检测:在获取到的图像中,使用角点检测算法(如 Harris 角点检测)检测出标定板上的角点。
4. 计算变换矩阵:根据标定板上的角点坐标和相机拍摄到的图像,可以计算出相机的旋转和平移矩阵。
5. 相机标定:使用 cv::calibrateCamera() 函数,将计算出的变换矩阵输入到函数中,即可计算出相机的内部参数和外部参数。
需要注意的是,相机标定的结果可能会受到多种因素的影响,如标定板的形状、大小、标定时的光照条件等。
《opencv的相机标定方法》篇2相机标定是计算机视觉中一个重要的问题,它的目的是确定相机内部参数和外部参数,以便于后续图像处理和计算机视觉任务。
在 OpenCV 中,相机标定可以采用多种方法,其中比较常见的包括:1. 张正友标定法(Zhang Z. et al. A flexible camera calibration method for non-coplanar cameras. ICCV 99):该方法适用于非平面相机标定,需要标定板放置在不同的位置和角度,通过解方程组来求解相机内部参数和外部参数。
基于OpenCV的摄像机标定方法实现
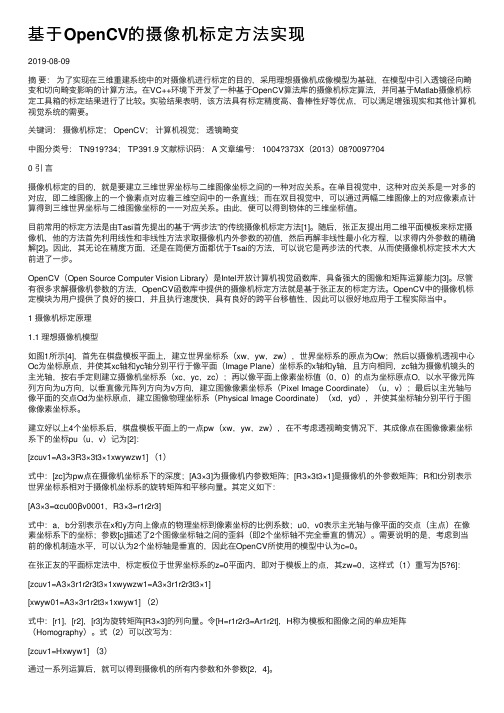
基于OpenCV的摄像机标定⽅法实现2019-08-09摘要:为了实现在三维重建系统中的对摄像机进⾏标定的⽬的,采⽤理想摄像机成像模型为基础,在模型中引⼊透镜径向畸变和切向畸变影响的计算⽅法。
在VC++环境下开发了⼀种基于OpenCV算法库的摄像机标定算法,并同基于Matlab摄像机标定⼯具箱的标定结果进⾏了⽐较。
实验结果表明,该⽅法具有标定精度⾼、鲁棒性好等优点,可以满⾜增强现实和其他计算机视觉系统的需要。
关键词:摄像机标定; OpenCV;计算机视觉;透镜畸变中图分类号: TN919?34; TP391.9 ⽂献标识码: A ⽂章编号: 1004?373X(2013)08?0097?040 引⾔摄像机标定的⽬的,就是要建⽴三维世界坐标与⼆维图像坐标之间的⼀种对应关系。
在单⽬视觉中,这种对应关系是⼀对多的对应,即⼆维图像上的⼀个像素点对应着三维空间中的⼀条直线;⽽在双⽬视觉中,可以通过两幅⼆维图像上的对应像素点计算得到三维世界坐标与⼆维图像坐标的⼀⼀对应关系。
由此,便可以得到物体的三维坐标值。
⽬前常⽤的标定⽅法是由Tasi⾸先提出的基于“两步法”的传统摄像机标定⽅法[1]。
随后,张正友提出⽤⼆维平⾯模板来标定摄像机,他的⽅法⾸先利⽤线性和⾮线性⽅法求取摄像机内外参数的初值,然后再解⾮线性最⼩化⽅程,以求得内外参数的精确解[2]。
因此,其⽆论在精度⽅⾯,还是在简便⽅⾯都优于Tsai的⽅法,可以说它是两步法的代表,从⽽使摄像机标定技术⼤⼤前进了⼀步。
OpenCV(Open Source Computer Vision Library)是Intel开放计算机视觉函数库,具备强⼤的图像和矩阵运算能⼒[3]。
尽管有很多求解摄像机参数的⽅法,OpenCV函数库中提供的摄像机标定⽅法就是基于张正友的标定⽅法。
OpenCV中的摄像机标定模块为⽤户提供了良好的接⼝,并且执⾏速度快,具有良好的跨平台移植性,因此可以很好地应⽤于⼯程实际当中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MethodofCCDCameraCalibrationBasedOnOpenCVLEIMing-zhe1,SUNShao-jie2,CHENJin-liang1,TAOLei1,WEIKun1(1.North Automation Control Technology Institute ,Taiyuan 030006,China ;2.Navy Submarine Academy ,Qingdao 266042,China)Abstract:Computervisionhasbeenwidelyusedinindustry,agriculture,military,transportationareaandsoon.Cameracalibrationisveryimportantandalsothekeyresearchfieldofvisionsystem.ThispapermainlyresearchesonthemethodofCCDcameracalibration,thepin-holemodelhasbeenintroducedandappliedinprocessofcalibration.Specially,inordertoimprovetheaccuracy,bothradialandtangentiallensdistortionhavebeentakenintoaccountduringtheimplementofcalibrationbasedonOpenCV.Thiskindofarithmetichaspracticalvalueontheapplicationdesignofimageprocessingandcomputervision,andexperimentresultsshowgoodprecision,whichcanmeettheapplicationneedofvisualinspectionorothervisionsystemswell.Keywords:pin-holemodel,cameracalibration,lensdistortion,OpenCV摘要:计算机视觉在工业,农业,军事,交通等领域都有着广泛应用。
摄像机标定是视觉系统的重要环节,也是研究的关键领域。
以摄像机标定技术为研究对象,选取针孔成像模型,简述了世界坐标系、摄像机坐标系和图像坐标系及其相互间的位置关系,对标定过程进行了深入研究。
特别地,为提高标定精度,充分考虑了透镜径向和切向畸变影响及其求解方法,制作了棋盘格平面标定模板,基于开放计算机视觉函数库(OpenCV)实现了摄像机标定。
该标定算法能够充分发挥OpenCV函数库功能,对于图像处理与计算机视觉方面的应用设计具有实用价值。
实验结果表明该方法取得了较高精度,能够满足视觉检测或其他计算机视觉系统的应用需要。
关键词:针孔模型,摄像机标定,透镜畸变,OpenCV中图分类号:S219文献标识码:A基于OpenCV的CCD摄像机标定方法雷铭哲1,孙少杰2,陈晋良1,陶磊1,魏坤1(1.北方自动控制技术研究所,太原030006;2.海军潜艇学院,山东青岛266042)文章编号:1002-0640(2014)增刊-0049-03Vol.39,SupplementJul,2014火力与指挥控制FireControl&CommandControl第39卷增刊引言摄像机标定是计算机视觉系统的前提和基础,其目的是确定摄像机内部的几何和光学特性(内部参数)以及摄像机在三维世界中的坐标关系(外部系数)[1]。
考虑到摄像机标定在理论和实践应用中的重要价值,学术界近年来进行了广泛的研究。
摄像机标定方法可以分为线性标定和非线性标定,前者简单快速,精度低,不考虑镜头畸变;后者由于引入畸变参数而使精度提高,但计算繁琐,速度慢,对初值选择和噪声敏感。
本文将两者结合起来,采用由粗到精策略,以实现精确标定。
1摄像机模型本文选取摄像机模型中常用的针孔模型[2-3],分别建立三维世界坐标系(O w X w Y w Z w ),摄像机坐标系(O c X c Y c Z c )及图像平面坐标系(O 1xy )如下页图1所示。
其中摄像机坐标系原点O c 为摄像机光心,Z c 轴与光轴重合且与图像平面垂直,O c O 1为摄像机焦距f 。
图像坐标系原点O 1为光轴与图像平面的交点,x ,y 轴分别平行于摄像机坐标系X c 、Y c 轴。
设世界坐标系中物点P 的三维坐标为(X w ,Y w ,Z w),它在理想的针孔成像模型下图像坐标为P (X u ,Y u ),但由于透镜畸变引起偏离[4-5],其实际图像坐标为P (X d ,Y d)。
图像收稿日期:2013-09-20修回日期:2013-11-10作者简介:雷铭哲(1977-),男,湖北咸宁人,硕士。
研究方向:故障诊断系统。
49··图1摄像机模型各坐标系示意图坐标系是存储在计算机中的数字图像的坐标系,可用两种方法表示,一种以像素为单位,坐标系原点O 位于图像左上角;另一种以物理单位(如mm)表示,其原点位于O 1,x 、y 轴分别与u 、v 轴平行。
根据上述模型,将空间任意一点P 变换到图像平面像素坐标系的过程可由以下步骤实现:1)世界坐标系到摄像机坐标系的变换:(1)其中,R 为旋转矩阵,T 为平移向量。
2)针孔模型下理想透视投影变换:(2)3)考虑透镜的畸变,从理想成像平面到实际成像平面的坐标转换为:(3)式中,k 1、k 2为径向畸变系数,p 1、p 2为切向畸变系数,ρ2=X d2+Y d2。
4)实际图像坐标系到计算机图像坐标系的变换:(4)其中,(u 0,v 0)为计算机图像主点(摄像机光轴与图像平面交点)的坐标,s x 、s y 为图像平面单位距离的像素数(pix-els/mm)。
根据各坐标系之间的对应关系,综合可得点P 由世界坐标系到图像像素坐标系的转换关系,写成齐次方程形式为(5)其中,f x =f/dx ,f y =f/dy ,γ为两坐标轴间的倾斜因子[6],M 1完全由αx 、αy 、u 0、v 0决定,因其只与摄像机内部结构有关,故称为摄像机内部参数,M 2完全由摄像机相对于世界坐标系的方位决定,称为摄像机外部参数[7],0=(000)T。
2摄像机模型参数的求解设定标板放在世界坐标系Z w =0的平面内,则根据式(5)可得Z c m =HM(6)其中,m =[u v 1]T ,M =[X c Y c 1]T,H=[h 1h 2h 3]=λM [R x R y T ],称为透视投影矩阵,λ为比例系数。
从而得到:(7)由旋转矩阵的正交性,每幅图像有两个对内参数矩阵的约束条件:(8)利用空间中某一点和其相应成像点的对应关系,可求解得投影矩阵H 。
根据文献[8],为求得H 的唯一解并提高解的精度,通常所采用的点数远大于3。
求得H 之后,利用上述约束条件及内外参数矩阵之间的特定关系,即可求出摄像机内部参数矩阵M 1,继而根据M 1确定相对于每幅图像的各个外参数。
考虑到畸变模型的非线性特点,可将线性解作为初始值,利用LM最小二乘法使形如式(9)的目标函数达到最小值来优化标定结果[9]。
(9)其中,m 赞=(u 赞,v 赞)为标定板上第j 个点在第i 幅图像上的经过径向畸变校正的投影点,A ,R i ,T i 初始值可以设为式(5)计算得到的内外参数矩阵。
3标定实验及结果本文实验用摄像机镜头和传感器物理参数为:镜头焦距f =35mm,CCD传感器晶片尺寸为8.8mm×6.6mm,图像分辨率为1360×1024。
制作一张11×7的棋盘格平面作为标定模板,其中每个正方格的边长均为100mm。
实验中将模板平面放在摄像头的视野中,在自然光条件下拍摄,不断调整平面模板的角度和位置,共采集12幅图像。
摄像头采集到的标定图片如图2所示。
图2摄像机采集的标定图片图像采集完成后,用于标定的图片以BMP格式存储在讨算机中。
计算机执行标定程序,读入图像数据,分别对摄像头采集到的图像检测角点坐标,然后利用前文所述方法求解投影矩阵、内部参数矩阵和外部参数矩阵。
标定流程如下页图3所示。
12张棋盘格模板相对于摄像机的三维位置如下页图4火力与指挥控制2014年增刊50··!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!(上接第48页)图11组件开发支撑平台工具开发了一套原型系统,验证了本文相关研究。
某机载雷达对抗仿真推演系统开发实践证明,本文设计的体系结构具有适用性与灵活性,能够满足电子对抗仿真推演需求。
基于组件技术的开发技术能够实现系统模块化开发与组装式开发,能够提高系统开发效率。
参考文献:[1]BassL,ClementsP,KazmanR.SoftwareArchitectureinPractice[M].AddisonWesley,2003.[2]RadeskiA,ParrS,Keith-MageeR,etal.Component-BasedDevelopmentExtensionstoHLA[C]//Proceedingsofthe2002SpringSimulationInteroperabilityWorkshop(SISOSpring2002).PaperID02S-SIW-046,March2002.[3]马亚平,李柯,王振宇.联合作战模拟系统体系结构设计需求分析[J].计算机仿真,2004,12(12):1-3.[4]蒋旭,鲁智勇,聂孝亮.某机载雷达对抗仿真训练系统分析与设计[J].计算机工程与科学,2011,33(3):113-119.所示,其中(O c X c Y c Z c )为摄像机坐标系。
对图像进行重投影定标,求得平均误差为0.34662像素,达到亚像素级精度,能够满足实际应用的需求。
图4外部参数3D示意图为了验证本文算法进行摄像机参数标定结果的正确性,实验时再用Bouguet开发的Matlab标定工具箱对上述棋盘格图像进行摄像机参数标定,结果如表1所示。
从表中可以看出,本文算法标定结果和Bouguet算法所得结果非常接近,求得镜头焦距f 在35.016mm ̄35.142mm之间,与给定的35mm相差很小,表明了本文算法的正确性和有效性。
表1摄像机参数标定结果比较4结束语本文实现了基于OpenCV的摄像机标定,综合线性和非线性方法,采用由粗到精策略,考虑了各种畸变,实验结果表明,标定结果能够满足实际应用的精度需求。
相对Matlab标定方法,本文标定过程无需人工参与,且标定速度快,非常适合实际应用。