Agilent——眼图抖动相噪
jitter抖动(相位噪声)的概念及其测量方法(EyeDiagram)
抖动的概念及其测量方法摘要:在数字通信系统,特别是同步系统中,随着系统时钟频率的不断提高,时间抖动成为影响通信质量的关键因素。
本文介绍了时间抖动(jitter)的概念及其分析方法。
关键字:时间抖动、jitter、相位噪声、测量一、引言随着通信系统中的时钟速率迈入GHz级,抖动这个在模拟设计中十分关键的因素,也开始在数字设计领域中日益得到人们的重视。
在高速系统中,时钟或振荡器波形的时序误差会限制一个数字I/O接口的最大速率。
不仅如此,它还会导致通信链路的误码率增大,甚至限制A/D转换器的动态范围。
有资料表明在3GHz 以上的系统中,时间抖动(jitter)会导致码间干扰(ISI),造成传输误码率上升。
在此趋势下,高速数字设备的设计师们也开始更多地关注时序因素。
本文向数字设计师们介绍了抖动的基本概念,分析了它对系统性能的影响,并给出了能够将相位抖动降至最低的常用电路技术。
二、时间抖动的概念在理想情况下,一个频率固定的完美的脉冲信号(以1MHz为例)的持续时间应该恰好是1us,每500ns有一个跳变沿。
但不幸的是,这种信号并不存在。
如图1所示,信号周期的长度总会有一定变化,从而导致下一个沿的到来时间不确定。
这种不确定就是抖动。
抖动是对信号时域变化的测量结果,它从本质上描述了信号周期距离其理想值偏离了多少。
在绝大多数文献和规范中,时间抖动(jitter)被定义为高速串行信号边沿到来时刻与理想时刻的偏差,所不同的是某些规范中将这种偏差中缓慢变化的成分称为时间游走(wander),而将变化较快的成分定义为时间抖(jitter)。
图1 时间抖动示意图1.时间抖动的分类抖动有两种主要类型:确定性抖动和随机性抖动。
确定性抖动是由可识别的干扰信号造成的,这种抖动通常幅度有限,具备特定的(而非随机的)产生原因,而且不能进行统计分析。
随机抖动是指由较难预测的因素导致的时序变化。
例如,能够影响半导体晶体材料迁移率的温度因素,就可能造成载子流的随机变化。
高速数字信号的眼图和抖动测量技术(基于Keysight示波器测量)
的,周期性波形
• 效果相当于调频FM
• 可能的抖动源:电源的EMI干扰、扩频时钟SSC的调制信号
TIE Trend曲线,即 TIE随时间变化的曲线, 呈现出正弦波特性
深圳市飞尔沃科技©
V 1.0
19
占空比失真DCD
• 不对称的上升边沿速率与下降边沿速率
• 不适当的判断门限选择
深圳市飞尔沃科技©
V 1.0
深圳市飞尔沃科技©
V 1.0
23
Bathtub曲线
• Bathtub曲线的中部大部分地 受到Rj的影响 • 靠向眼睛交叉点较大地受到Dj 影响 • 在既定的BER水平下,Dj的PkPk值与Rj的标准偏差值影响眼 睛的张开度
深圳市飞尔沃科技©
V 1.0
24
TJ(BER)的估算
For a BER = 10-12 JPPRJ = 14 s …7 for each tail
安捷伦仪器与仪表产品培训课程
高速数字信号的 眼图和抖动测量技术
深圳市飞尔沃科技©
V 1.0
1
内容纲要
第一部分:眼图和抖动测量简介 第二部分:眼图测量的操作步骤 第三部分:抖动测量的操作步骤 第四部分:抖动分解的操作步骤
深圳市飞尔沃科技©
V 1.0
2
第一部分: 眼图和抖动测量简介
深圳市飞尔沃科技©
抖动的常见术语
抖动测试的衡量方法
• 平均值(mean)
• 标准偏差(standard deviation)
• 峰-峰值(peak to peak)
深圳市飞尔沃科技©
V 1.0
14
抖动测量举例
0.0 ns 0.990 ns 2.000 ns 2.980 ns 4.000 ns
眼图功能模拟算法与应用

-30
-40
-50
-60 0
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
Freq(Hz)
x 1010
对该 VNA 测试获得的插损特性,从上图可以看出,S 参数反射特性测试带宽为 20GHz。 根据实部信号的频率镜像扩展特性获得 40GHz 全频段特性。
深圳市中泽凌电子有限公司
Channel Insertion Loss with image frequency 0
-10
-20
Loss(dB)
-30
-40
-50
-60
-2.5 -2 -1.5 -1 -0.5
0
0.5
1
1.5
2
Freq(Hz)
x 1010
利用该 40GHz 频域传递特性进行逆傅立叶变换,获得通道直通的时域冲击相应特性, 建立通道直通时域传递特性。
Channel Eyediagram
0.3
0.2
0.1
Voltage(v)
0
-0.1
-0.2
-0.3
10
20
30
40
50
60
Time(UI)
二、眼图功能算法应用 经过算法验证,该算法可应用于线缆组件电性能自动检测仪,解决现有客户 VNA 不支
持眼图功能模式。设备功能单元包括,如下图所示。 1、 工控机(内置 MiniSAS 内口/外口线缆自动化测试软件) 2、 通道控制器(4 通道控制器或 8 通道控制器) 3、 VNA(E5071C) 4、 MiniSAS 内口测试夹具或 MiniSAS 外口测试夹具
0.3 0.2 0.1
0
Voltage(v)
Agilent-眼图、抖动、相噪
Agilent——眼图、抖动、相噪随着数据速率超过Gb/s水平,工程师必须能够识别和解决抖动问题。
抖动是在高速数据传输线中导致误码的定时噪声。
如果系统的数据速率提高,在几秒内测得的抖动幅度会大体不变,但在位周期的几分之一时间内测量时,它会随着数据速率成比例提高,进而导致误码。
新兴技术要求误码率(BER),亦即误码数量与传输的总码数之比,低于一万亿分之一(10-12)。
随着数据通信、总线和底板的数据速率提高,市场上已经出现许多不同的抖动检定技术,这些技术采用各种不同的实验室设备,包括实时数字示波器、取样时间间隔分析仪(TIA)、等时取样示波器、模拟相位检波器和误码率测试仪(BERT)。
为解决高数据速率上难以解决的抖动问题,工程师必需理解同步和异步网络中使用的各种抖动分析技术本文重点介绍3 Gb/s以上新兴技术的数据速率。
低于3 Gb/s的实时示波器可以捕获连续的数据流,可以同时在时域和频域中分析数据流;在更高的数据速率上,抖动分析要更具挑战性。
本文将从数字工程师的角度,介绍应对SONET/SDH挑战的各种经验。
抖动分析基本上包括比较抖动时钟信号和参考时钟信号。
参考时钟是一种单独的黄金标准时钟,或从数据中重建的时钟。
在高数据速率时,分析每个时钟的唯一技术是位检测和误码率测试;其它技术则采用某种取样技术。
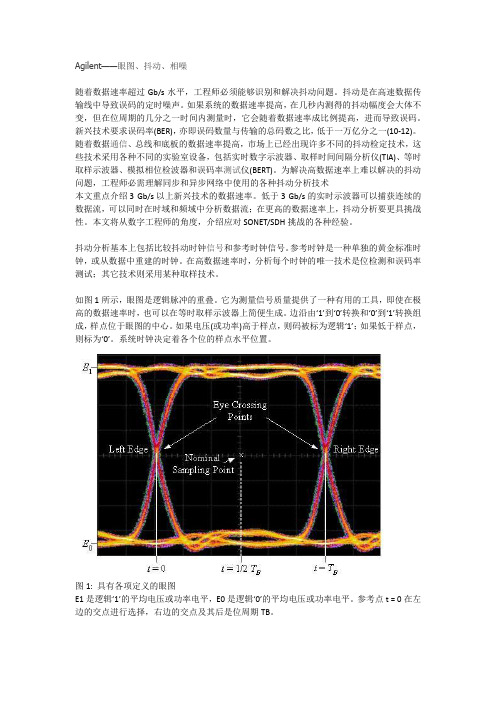
如图1所示,眼图是逻辑脉冲的重叠。
它为测量信号质量提供了一种有用的工具,即使在极高的数据速率时,也可以在等时取样示波器上简便生成。
边沿由‘1’到‘0’转换和‘0’到‘1’转换组成,样点位于眼图的中心。
如果电压(或功率)高于样点,则码被标为逻辑‘1’;如果低于样点,则标为‘0’。
系统时钟决定着各个位的样点水平位置。
图1: 具有各项定义的眼图E1是逻辑‘1’的平均电压或功率电平,E0是逻辑‘0’的平均电压或功率电平。
参考点t = 0在左边的交点进行选择,右边的交点及其后是位周期TB。
Eye Crossing Point: 眼图交点Left Edge: 左沿Right Edge: 右沿Nominal Sampling Point: 标称样点幅度噪声可能会导致逻辑‘1’的电压或功率电平垂直波动,低于样点,导致逻辑‘1’码错误地标为逻辑‘0’码,即误码。
安捷伦AgilentEB频谱分析仪使用说明简介

Agilent E4402BESA-E Series Spectrum Analyzer使用方法简介宁波之猫2009-6-17目录1简介 (4)2.面板 (5)2.1 操作区 (5)2.2 屏幕显示 (7)3.各功能区的使用 (8)3.1 Control(控制)功能区 (8)3.1.1 Frequency Channel: (8)3.1.2 Span X Scale (9)3.1.3 Amplitude Y Scale (9)3.1.4 Input/Output (10)3.1.5 View/Trace (10)3.1.6 Display (11)3.1.7 Mode (12)3.1.9 Auto Cuple (12)3.1.10 BW/Avg (12)3.1.11 Trig (13)3.1.12 Single (13)3.1.13 Sweep (13)3.1.14 Source (14)3.2 Measure(测量)功能区 (14)3.2.1 Measure (14)3.2.2 Meas Setup (15)3.2.3 Meas Control (15)3.3 System(系统)功能区 (15)3.3.1 System (15)3.3.2 Preset (15)3.3.4 Print Setup&Print (16)3.4 Marker(标记)功能区 (16)3.4.1 Marker (16)3.4.2 Peak Search (16)3.4.3 Freq Count (16)3.4.4 Marker → (16)4.测试步骤举例 (17)1简介Agilent ESA-E系列是能适应未来需要的Agilent中性能频谱分析仪解决方案。
该系列在测量速度、动态范围、精度和功率分辨能力上,都为类似价位的产品建立了性能标准。
它灵活的平台设计使研发、制造和现场服务工程师能自定义产品,以满足特定测试要求,和在需要时用新的特性升级产品。
安捷伦化学工作站-Agilent
回归分析
237
回归系数
238
标准偏差 (S) 238
内部存储双精度数的存取
239
12 系统认证 243
系统认证
244
认证和诊断视图
GLPsave 注册数据
247 248
索引 249
14
了解安捷伦化学工作站
安捷伦化学工作站 了解您的化学工作站
1 安捷伦化学工作站功能
概述 16 附加的仪器模块 16 化学工作站硬件 17 关于化学工作站软件 18 操作系统 18 方法和序列 18 系统配置 18 数据模型 18 文件命名规则 19 软件的用户界面 21 数据采集 22 数据分析 — 显示 23 数据分析 — 积分 23 积分器功能功能 24 数据分析 — 定量 25 数据分析 — 标准报告 25 数据分析 — 特定报告 26 应用软件及兼容性 29 自定义 29 自动分析 29 优良实验室规范 31 仪器控制 33 联网 33 说明材料 34 化学工作站目录结构 36
循环单级校正序列
176
循环多级校正序列 方法 A 的分析次序 方法 B 的分析次序
177 179 180
简明及循环混合校正
181
示例
181
SimpReg 分析次序
182
区间循环校正序列 183
示例
183
区间循环校正序列操作 184
示例
185
使用含相同浓度的多个标样的循环重新校正序列
187
使用 “小循环”校正样品瓶的循环重新校正序列
序列参数
159
序列表 160
序列的建立 161
使用序列表编辑器
161
使用 “插入样品瓶范围”按钮
电子论文-Agilent E5500 Series Phase Noise Measurement Solutions
The Agilent Technologies E5500 series is a modular family of phase noise measurement solutions. For flexibility in configuring a solution that meets your exact needs, system components can be ordered as separate line items. Convenient, preconfigured solutions that meet a wide range of needs are also available. The E5500 series solution softwarerequires a Pentium® PC running Windows NT® 4.0.Agilent E5500 SeriesPhase Noise Measurement SolutionsConfiguration and Performance Guide50 kHz to 110 GHzATE Focused Preconfigured SolutionsE5501A 50 kHz to 1.6 GHz carrier frequencyE5502A 50 kHz to 6.0 GHz carrier frequencyE5503A 50 kHz to 18.0 GHz carrier frequencyE5504A 50 kHz to 26.5 GHz carrier frequencySolution components include:E1430A DC to 4 MHz VXI digitizerE1421B6-slot, high power VXI mainframe70420A MMS baseband phase noise test set70001A MMS mainframeE5480A LTU ACM softwareE5495A LTU remote SCPI client softwareHigh speed VXI-PC digital interfaceAgilent E5502/03/04A solutions also include a low noise 6, 18, or 26.5 GHz downconverter respectively.Option 001 add high power input capability (includes 26.5 GHz microwave phase detector and AM detector)Option 201add 26.5 GHz microwave phase detector onlyOption W30 add two additional years of return-to-Agilent serviceOption W50add four additional years of return-to-Agilent serviceOption +24D on-site customer training (contact SSV microwave systems engineer)Select a low noise RF reference source:Option 401add 8662A (includes E5485A LTU ACM software)Option 402 add 8663A (includes E5485A LTU ACM software)Option 403add 8643A (includes E5486A LTU ACM software)Option 404add 8644B (includes E5486A LTU ACM software)Option 405add 8644B/002 (includes E5486A LTU ACM software)Option 406add 8664A/004 (includes E5486A LTU ACM software)Option 407add 8665A/004 (includes E5486A LTU ACM software)Option 408add 8665B/004 (includes E5486A LTU ACM software)Option 409add ESG1000 (includes E5488A LTU ACM software)Option 410add 8657A (includes E5488A LTU ACM software)Select additional components:Option 420 add E1437A DC to 8 MHz digitizer (includes E5491A LTU ACM software)Option 430add E4411A 9 kHz to 1.5 GHz RFSA (includes E5483A LTU ACM software)Option 440add E1420B counter (includes E5492A LTU ACM software)Option S50add programmable delay lineOption N60add system rackOption F01add Pentium® PC with Windows NT®4.0 (specify exact requirements)Option N70add mm mixers and miscellaneous hardware2Benchtop Focused Preconfigured SolutionsE5501B 50 kHz to 1.6 GHz carrier frequencyE5502B50 kHz to 6.0 GHz carrier frequencyE5503B50 kHz to 18.0 GHz carrier frequencyE5504B50 kHz to 26.5 GHz carrier frequencySolution components include:E4411A 1.5 GHz RFSA70420A MMS baseband phase noise test set70001A MMS mainframeE5481A LTU ACM softwareE5483A LTU ACM softwarePentium® PC with Windows NT® 4.0 (32 MB ram, 1 GB hard drive, 82341C, digitizer)Agilent E5502/03/04B solutions also include a low noise 6, 18, or 26.5 GHz downconverter respectively.Option 001 add high power input capability (includes 26.5 GHz microwave phase detectorand AM detector)Option 110delete E4411A spectrum analyzer only Option 201add 26.5 GHz microwave phase detector onlyOption W30 add two additional years of return-to-Agilent serviceOption W50add four additional years of return-to-Agilent serviceOption +24D on-site customer training (contact SSV microwave systems engineer)Option 1FF delete computer and GPIB card only Select a low noise RF reference source:Option 401add 8662A (includes E5485A LTU ACM software)Option 402add 8663A (includes E5485A LTU ACM software)Option 403add 8643A (includes E5486A LTU ACM software)Option 404add 8644B (includes E5486A LTU ACM software)Option 405add 8644B/002 (includes E5486A LTU ACM software)Option 406add 8664A/004 (includes E5486A LTU ACM software)Option 407add 8665A/004 (includes E5486A LTU ACM software)Option 408add 8665B/004 (includes E5486A LTU ACM software)Option 409add ESG1000 (includes E5488A LTU ACM software)Option 410 add 8657A (includes E5488A LTU ACM software)Select additional components:Option S21 add 89410A DC to 10 MHz FFT analyzer (includes E5482A LTU ACM software) Option N31add 8560E RFSA (includes E5484A LTU ACM software)Option 440add 53181A counter (includes E5489A LTU ACM software)Option S50add programmable delay lineOption N60add system rackOption F01add Pentium® PC with Windows NT®4.0 (specify exact requirements)Option N20add E5495A LTU remote SCPI client softwareOption N70add mm mixers and miscellaneoushardware3Configuring a Specific Phase Noise Measurement SolutionAgilent E5500A ExxGeneric phase noise solution ordering convenience; must obtain a specific option quote from Agilent sales representative and factorySelect a baseband test set (required component):70420A50 kHz to 1.6 GHz carrier frequency four-slot MMS moduleOption 001 add high power input capability (includes 26.5 GHz microwave phase detectorand AM detector)Option 201 add 26.5 GHz microwave phase detector onlyMMS mainframe (one required):70001A MMS mainframeSelect a baseband analyzer and appropriate control software (required):89410A DC to 10 MHz analyzerE5482A LTU ACM software for 89410AE4411A 9 kHz to 1.5 GHz RFSAE5483A LTU ACM software for E4411AE1430A DC to 4 MHz digitizerE5480A LTU ACM software for E1430AE1437A DC to 8 MHz digitizerE5491A LTU ACM software for E1437A71209AE5484A LTU ACM software for 71000 series8560EE5484A LTU ACM software for 8560 series8563EE5484A LTU ACM software for 8560 seriesVXI mainframe (one required for E1430A or 1437A):E1421B 6-slot high power VXI mainframeE1401B 13-slot high power VXI mainframeHigh speed VXI-PC digital interface Select a low noise RF reference signal generator and appropriate control software (recommended):8662AE5485A LTU ACM software for 8662/63A8663AE5485A LTU ACM software for 8662/63A8643AE5486A LTU ACM software for 8643/44/64/658644BE5486A LTU ACM software for 8643/44/64/658664AE5486A LTU ACM software for 8643/44/64/658665AE5486A LTU ACM software for 8643/44/64/658642AE5487A LTU ACM software for 8642A/B8657AE5488A LTU ACM software for 8657AESG1000E5488A LTU ACM software for ESG seriesSelect a low noise microwave MMS downconverter:70422A 1 GHz to 18 GHz downconverter four-slot MMS module70427A 1.5 GHz to 26.5 GHz downconverter four-slot MMS moduleSelect other system components:E1420B frequency counterE5492A VXI frequency counter ACM53181A frequency counterE5489A frequency counter ACM for 531xx family programmable delay lineon-site customer traininginclude a Pentium® PCVXI E6490A series RF switch matrixMMS 70000series RF switch matrixsystem rackon-site installation4Determining Overall Solution Performance Measurement accuracyMeasurement of all noise and spurious present at the phase detector inputs and system contribution, provided the following conditions are met: Source return loss >9.5 dB (<2:1 VSWR)Source harmonic distortion <–20 dB (or square wave)Nonharmonic spurious <–26 dBc (except for PM close to carrier)Supported measurement configuration (PLL verification)±2 dB for <1.0 MHz offsets±4 dB for <100 MHz offsets Overall phase noise measurement system sensitivity is a combination of noise contributions from the baseband test set, the RF reference source, and the microwave downconverter used and is normally dominated by either the RF reference source or the microwave downconverter:Baseband test set + RF reference + microwave DC noise floor noise floor noise floorWhen the dominant noise contributions (RF refer-ence and the downconverter) are close to each other, a noise floor correction factor (dB) is added to the most dominant noise contributor in order to determine overall system noise floor:Magnitude 161063210 difference (dB)Noise 0.1 0.4 1.2 1.8 2.1 2.5 3 correctionfactor (dB)56Agilent 70420A Specification Summary(does not include phase noise and spurious signals from a reference source)Carrier frequency: 50 kHz to 1.6 GHz Offset frequency System noise floor 0.01 Hz 70 dBc/Hz 1.0 Hz 130 dBc/Hz 10 kHz 170 dBc/Hz >10 kHz 170 dBc/Hz Offset frequency Spurious response .01 Hz 70 dBc 0.1 Hz 100 dBc >10 Hz112 dBcCarrier frequency: 1.2 GHz to 26.5 GHz Offset frequency System noise floor 0.01 Hz 55 dBc/Hz 1.0 Hz 115 dBc/Hz 32 kHz 160 dBc/Hz >32 kHz 160 dBc/Hz Offset frequency Spurious response 0.01 Hz 50 dBc 0.1 Hz 80 dBc >10 kHz97 dBcGeneral specificationsOperating temperature range: +0 °C to +55 °C Warm-up time: 20 minutes General considerations:The 70420A has low susceptibility to RFI and mechanical vibration. Care must be exercised however in making measurements in high RFI or vibration environments as spurious signals may be induced in the module.Agilent 70421A Specification SummaryRF Input 1.0 GHz to 6.6 GHz IF output 5 MHz to 1.2 GHzIF output power0 to +5 dBmIF gain0 to 45 dB (5 dB steps)Input power+15 dBm max Mixing spurious (<+15 dBm at mixer)5 dBm min <6 GHz<50 dBc (except below)>6 GHz<70 dBcNoise figure 15 dB (typical)Carrier frequency range (GHz)Typicalwhere a mixing spur will occur spurious<100 MHz from carrier(dBc)LO resolution600 MHz (1.8 GHz to 6.0 GHz) 1.566 – 1.634, 1.166 – 1.23411.060 – 1.200, 1.274 – 1.303 201.325 – 1.375, 1.420 – 1.4601.775 – 1.8251.013 – 1.043, 1.250 – 1.043 301.900 – 1.940,2.225 – 2.2751.112 – 1.138, 1.483 – 1.517401.983 –2.017, 2.380 – 2.4202.483 – 2.517, 2.975 –3.0253.583 – 3.6172.556 – 2.586, 2.983 –3.017503.071 – 3.101Downconverter noise floor(all oscillators locked)Input Offset from carrier (Hz)frequency1101001k10k100k1M10M100M Spurious (dBc)<1k>1k 1.0 to Typical50809712513714314514514560753.0 GHz Specification45759212013213814014014050653.0 to Typical44749111913114314514514550806.6 GHz Specification3969861141261381401401404470 General specificationsOperating temperature range: +0 °C to +55 °CWarm-up time: 20 minutesGeneral considerations:The 70421A has low susceptibility to RFI and mechanicalvibration. Care must be exercised however, in makingmeasurements in high RFI or mechanical vibration environ-ments as spurious signals may be induced in the module.7Agilent 70422A specification summaryRF Input 1.0 GHz to 18 GHz IF output 5 MHz to 1.2 GHz(18 GHz to 20 GHz IF output power0 to +5 dBmtypical overrange)IF gain0 to 45 dB (5 dB steps)Input power+15 dBm max Mixing spurious (<+15 dBm at mixer)5 dBm min to 12 GHz<6 GHz<50 dBc (except below)10 dBm min to 18 GHz>6 GHz<70 dBcNoise figure 15 dB (typical)Carrier frequency range (GHz)Typicalwhere a mixing spur will occur spurious<100 MHz from carrier(dBc)LO resolution600 MHz (1.8 GHz to 18 GHz) 1.566–1.634, 1.166–1.234101.060–1.200, 1.274–1.303 201.325–1.375, 1.420–1.4601.775–1.8251.013–1.043, 1.250–1.043 301.900–1.940,2.225–2.2751.112–1.138, 1.483–1.517401.983–2.017, 2.380–2.4202.483–2.517, 2.975–3.0253.583–3.6172.556–2.586, 2.983–3.017503.071–3.101Downconverter noise floor(all oscillators locked)Input Offset from carrier (Hz)frequency1101001k10k100k1M10M100M Spurious (dBc)<1k>1k 1.0 to Typical5080971251371431451451456075 3.0 GHz Specification4575921201321381401401405065 3.0 to Typical4474911191311431451451455080 6.0 GHz Specification3969861141261381401401404470 6.0 to Typical3868851131251401401401405080 12.0 GHz Specification3363801081201351351351354070 12.0 to Typical3464811091211311311311314770 18.0 GHz Specification2959761041161261261261263760General specificationsOperating temperature range:+0 °C to +55 °CWarm-up time:20 minutesGeneral considerations:The 70422A has low susceptibility to RFI and mechanicalvibration. Care must be exercised however, in makingmeasurements in high RFI or mechanical vibrationenvironments as spurious signals may be induced inthe module.8Agilent 70427A specification summaryRF input 1.5 GHz to 26.5 GHz IF output 5 MHz to 1.2 GHzIF output power0 to +5 dBm (>30 dBm input)IF gain0 to 45 dB (5 dB steps)Input power+30 dBm max Mixing spurious (<+15 dBm at mixer)30 dBm min<6 GHz<50 dBc (except below)>6 GHz<70 dBcNoise figure 20 dB (typical)Carrier frequency range (GHz)Typicalwhere a mixing spur will occur spurious<100 MHz from carrier(dBc)Spectral purity for input signals <0 dBm, 1.586 – 1.61420noise at offsets >1 kHz may 1.790 – 1.81, 1.912 – 1.92830increase by 1 dB for every dB 2.392 – 2.408, 2.872 – 2.88830of input power reduction 2.990 – 3.00030LO resolution600 MHz (2.4 GHz – 25.8 GHz) 1.708 – 1.720, 1.993 – 2.00740O power0 to +16 dBm (2.4 – 6.6 GHz) 2.240 – 2.260, 2.493 – 2.507400 to +10 dBm (7.2 – 25.8 GHz) 2.737 – 2.749, 3.592 – 3.600402.051 – 2.063, 2.095 – 2.100502.565 – 2.578, 2.793 – 2.807503.000 – 3.007, 3.080 – 3.092503.493 – 3.507,4.108 – 4.120504.193 – 4.20050Downconverter noise floor(all oscillators locked)Input Offset from carrier (Hz)frequency1101001k10k100k1M10M100M Spurious (dBc)<100>1k1.5 to Typical508010012813814514514514560803.0 GHz Specification45759512313314014014014050653.0 to Typical44749412213414414714714750806.0 GHz Specification39698911712913914214214244706.0 to Typical3868881161281401431431435080 12.0 GHz Specification336383111123135138138138407012.0 to Typical3565851131251371401401404770 18.0 GHz Specification306080108120132135135135376018.0 to Typical3262821101221301301301304465 26.5 GHz Specification2757771051171251251251253455mm bands (when adding the 11970 series harmonic mixers)26 - 40Typical265676104116128130131131548033 - 50Typical265676104116128130131131447040 - 60Typical235373101113125127128128508050 - 75Typical235373101113125127128128407075 - 110Typical205070971091201221221224770General specificationsOperating temperature range: +0 °C to + 55 °CWarm-up time: 20 minutesGeneral considerations:The 70427A has low susceptibility to RFI and mechanicalvibration. Care must be exercised however, in makingmeasurements in high RFI or mechanical vibrationenvironments as spurious signals may be induced inthe module.9Agilent Technologies’ Test and MeasurementSupport, Services, and AssistanceAgilent Technologies aims to maximize the value you receive, while minimizing your risk and problems. We strive to ensure that you get the test and measurement capabilities you paidfor and obtain the support you need. Our extensive support resources and services can help you choose the right Agilent products for your applications and apply them successfully. Every instrument and system we sell has a global warranty. Support is available for at least five years beyond the produc-tion life of the product. Two concepts underlie Agilent’s overall support policy: “Our Promise” and “Your Advantage.”Our Promise“Our Promise” means your Agilent test and measurement equip-ment will meet its advertised performance and functionality. When you are choosing new equipment, we will help you with product information, including realistic performance specifica-tions and practical recommendations from experienced test engineers. When you use Agilent equipment, we can verify that it works properly, help with product operation, and provide basic measurement assistance for the use of specified capabili-ties, at no extra cost upon request. Many self-help tools are available.Your Advantage“Your Advantage” means that Agilent offers a wide range of additional expert test and measurement services, which you can purchase according to your unique technical and business needs. Solve problems efficiently and gain a competitive edge by contracting with us for calibration,extra-cost upgrades, out-of-warranty repairs, and on-site education and training, as well as design, system integration, project management, and other professional services. Experienced Agilent engineers and tech-nicians worldwide can help you maximize your productivity, optimize the return on investment of your Agilent instruments and systems, and obtain dependable measurement accuracyfor the life of those products.Pentium®is a U.S. registered trademark of Intel Corporation.Windows®is a U.S. registered trademark of Microsoft Corporation.By internet, phone, or fax, get assistance with all your test and measurement needs.Online Assistance/find/assistPhone or FaxUnited States:(tel) 1 800 452 4844Canada:(tel) 1 877 894 4414(fax) (905) 282 6495Europe:(tel) (31 20) 547 2323(fax) (31 20) 547 2390Japan:(tel) (81) 426 56 7832(fax) (81) 426 56 7840Latin America:(tel) (305) 269 7500(fax) (305) 269 7599Australia:(tel) 1 800 629 485(fax) (61 3) 9210 5947New Zealand:(tel) 0 800 738 378(fax) (64 4) 495 8950Asia Pacific:(tel) (852) 3197 7777(fax) (852) 2506 9284Product specifications and descriptions in thisdocument subject to change without notice.Copyright © 1998, 2000 Agilent TechnologiesPrinted in U.S.A. 10/005965-7589E。
抖动分析原理及安捷伦公司抖动分析解决方案

P3
0.980ns -0.030ns -0.020ns
(0.990/1.010/0.980/1.020)
P4
1.020ns 周期 0.040ns 周期到周期 0.000ns时间间隔误差
周期抖动 = 18.3ps RMS
周期到周期抖动 = 36.1ps RMS 时间间隔误差 = 9.6ps RMS
(0.020/-0.030/0.040)
2 1
4
Rise Fall
3
L_pkg C_comp R_pkg C_pkg
5
电路的不稳定性
PLL问题 同步开关噪声 互连阻抗不连续,互连损耗
上游的参考时钟
收发器发送的数据是以参考时钟为基准的,如果参考时钟
抖动过大。。。 使得抖动预估更困难 成为系统抖动
小结:抖动的成因
• 标准偏差 .
(所有测得的定时错误的RMS值).
• 峰 -峰值 .
(测得的定时错误的最大与最小值之差).
TIE的测量需要参考时钟.
常见的抖动术语小结
0.0ns 0.990ns 2.000ns 2.980ns 4.000ns
P1
0.990ns -0.010ns
P2
1.010ns 0.020ns 0.000ns
率噪声的方式显现出来。
目录
抖动的概念
抖动的成因 常见的抖动术语 抖动的分解 抖动测试分析方案
抖动的成因
热噪声
注入噪声
线路不稳定性 上游时钟
热噪声
随机性的 , 是多个随机抖动源的组合性现象 噪声所导致的抖动的分布是高斯与无边际的
注入噪声
确定性的, 能被确认为一些固有的成因 确定性抖动分布是有边际的,其频谱通常呈现为分离的谐波
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Agilent——眼图、抖动、相噪2009-02-25 22:31随着数据速率超过Gb/s水平,工程师必须能够识别和解决抖动问题。
抖动是在高速数据传输线中导致误码的定时噪声。
如果系统的数据速率提高,在几秒内测得的抖动幅度会大体不变,但在位周期的几分之一时间内测量时,它会随着数据速率成比例提高,进而导致误码。
新兴技术要求误码率(BER),亦即误码数量与传输的总码数之比,低于一万亿分之一(10-12)。
随着数据通信、总线和底板的数据速率提高,市场上已经出现许多不同的抖动检定技术,这些技术采用各种不同的实验室设备,包括实时数字示波器、取样时间间隔分析仪(TIA)、等时取样示波器、模拟相位检波器和误码率测试仪(BERT)。
为解决高数据速率上难以解决的抖动问题,工程师必需理解同步和异步网络中使用的各种抖动分析技术本文重点介绍3 Gb/s以上新兴技术的数据速率。
低于3 Gb/s的实时示波器可以捕获连续的数据流,可以同时在时域和频域中分析数据流;在更高的数据速率上,抖动分析要更具挑战性。
本文将从数字工程师的角度,介绍应对SONET/SDH挑战的各种经验。
抖动分析基本上包括比较抖动时钟信号和参考时钟信号。
参考时钟是一种单独的黄金标准时钟,或从数据中重建的时钟。
在高数据速率时,分析每个时钟的唯一技术是位检测和误码率测试;其它技术则采用某种取样技术。
如图1所示,眼图是逻辑脉冲的重叠。
它为测量信号质量提供了一种有用的工具,即使在极高的数据速率时,也可以在等时取样示波器上简便生成。
边沿由‘1’到‘0’转换和‘0’到‘1’转换组成,样点位于眼图的中心。
如果电压(或功率)高于样点,则码被标为逻辑‘1’;如果低于样点,则标为‘0’。
系统时钟决定着各个位的样点水平位置。
图1: 具有各项定义的眼图E1是逻辑‘1’的平均电压或功率电平,E0是逻辑‘0’的平均电压或功率电平。
参考点t = 0在左边的交点进行选择,右边的交点及其后是位周期TB。
Eye Crossing Point: 眼图交点Left Edge: 左沿Right Edge: 右沿Nominal Sampling Point: 标称样点幅度噪声可能会导致逻辑‘1’的电压或功率电平垂直波动,低于样点,导致逻辑‘1’码错误地标为逻辑‘0’码,即误码。
抖动描述了相同的效应,但它是水平波动。
抖动或定时噪声可能会导致码的边沿在水平方向中的样点内波动,导致错误。
从这种意义上讲,抖动定义为一个数字信号在有效时点上距理想时间位置的短期变化。
脉冲电压电平的波动源自不需要的调幅(AM)。
类似的,转换的定时波动可以描述为脉冲相位波动、不需要的调相(PM)或相噪。
在系统器件的定时方面,数据通信和电信技术并不相同。
在同步系统中,如SONET/SDH,系统器件同步到公共的系统时钟。
在信号通过网络传送时,不同器件生成的抖动会通过网络传播,除非对器件中传送的抖动提出严格的要求,否则抖动可能会无限制地提高。
在异步系统中,如千兆位以太网、PCI Express和光纤通道,器件定时由分布式时钟提供或从数据转换中重建的时钟中提供。
在这种情况下,必须限制器件生成的抖动,但从一个器件转移到另一个器件上的抖动则不太重要。
不管是哪种情况,底线是系统的工作性能如何,即误码率。
图2: 抖动大的眼图的交点,直方图是一个像素宽的交点块投射到时间轴上的投影器件生成的固有抖动称为抖动输出。
其主要来源可以分为两个:随机抖动(RJ)和确定性抖动(DJ)。
可以把抖动看作从理想定时位置的、逻辑转换的定时变化,如图2中的直方图所示。
这一分布显示了被不同抖动源模糊的理想定时位置。
抖动分布是RJ和DJ概率密度函数的卷积。
随机抖动源自各种随机流程,如热噪声和散粒噪声,其假设遵守高斯分布,如图3a所示。
由于高斯分布的尾部扩展到无穷大,RJ的峰到峰值没有边界,而RJ的均方根则收敛到高斯分布的宽度上。
图3: 单个时点的抖动、正弦周期抖动和随机抖动相结合,导致误码的实例Ideal Transition Edge: 理想的转换边沿RJ Smeared Edge: RJ模糊的边沿DJ Smeared Edge: DJ模糊的边沿确定性抖动(DJ)包括占空比失真(DCD)、码间干扰(ISI)、正弦或周期抖动(PJ)和串扰。
DCD 源自时钟周期中的不对称性。
ISI源自由于数据相关效应和色散导致的边沿响应变化。
PJ源自周期来源的电磁捡拾,如电源馈通。
串扰是由捡拾其它信号导致的。
DJ的特色特点是,其峰到峰值具有上下限。
DCD和ISI称为有界相关抖动;Pj和串扰称为不相关有界抖动;RJ称为不相关无界抖动。
识别不同类型的抖动来源,可以减少设计层次的问题,因为不同的器件以不同的方式生成抖动。
例如,发射机主要生成RJ。
外部调制的激光发射机生成的大多数抖动是由激光器和主参考时钟的随机抖动导致的。
相反,接收机生成的绝大部分抖动是DJ,这源于导致ISI的前置放大器和后置放大器连接的AC耦合等因素。
直接调制激光发射机受到RJ和DJ的影响。
介质采用两种方式:光纤从色散中增加DJ,从散射中增加RJ;传导介质从有限带宽中增加DJ,与低频和多个反射相比,高频的衰减要更高。
很重要的一点是,要理解抖动分布是由所有抖动源的卷积赋予的。
为直观地认识抖动,我们考察一下从‘0’到‘1’的逻辑转换,如图3b所示。
标有‘x’的样点距理想转换边沿右面位周期的一半。
现在,增加幅度为A的正弦DJ。
在波的顶部,边沿从理想边沿朝着样点移动距离A。
然后,根据高斯分布模糊边沿的位置,增加RJ。
如果边沿移到样点的右面,那么逻辑‘1’码被错误地标为‘0’。
在这种情况下,码边沿抖动经过样点的部分时间决定着BER。
如果已知抖动原因,则可以计算BER。
在本例中,抖动是RJ及PJ的一个来源,PJ移动边沿距离A及呈高斯分布的区域(图3a中的阴影部分),移到样点右面的概率决定着误码概率。
这展示了RJ和DJ 分布怎样一起卷积,即一种原因的效应叠加在另一种原因的效应之上,直到考虑了所有原因。
衡量系统功能的最终尺度是BER。
抖动分析的目标是确定抖动对BER的影响,并保证系统BER低于某个最大值,通常是10-12。
BER(T)由码型发生器、误码分析仪和系统时钟组成。
数据发生器把码型传送到系统器件上。
器件处理码型,把结果传送到误码分析仪,误码分析仪在已知码型上同步,计算收到的码数,确定哪些码接收错误,计算BER。
图4是BER图,它是样点时间位置BER(t)的函数,这个图称为BERT扫描图或浴缸曲线,简而言之,它在相对于参考时钟给定的额定取样时间的不同时间t上测得的BER。
参考时钟可以是信号发射机时钟,也可以是从接收的信号中恢复的时钟,具体取决于测试的系统。
图4的时间轴与图1相同,两侧与眼图边沿相对应,样点位于中心。
BER一定时,曲线之间的距离是该BER上的眼图张开程度。
在样点接近交点时,抖动会导致BER提高到最大0.5。
完整的BERT扫描测量是直接衡量BER一定时眼图张开程度的唯一方法。
遗憾的是,完整的BERT扫描图需要很长的时间,如在5 Gb/s时需要30分钟。
通过集中在眼图边沿进行部分BERT扫描,可以在几秒内,在10-15%的范围内保守地估算任何BER时的眼图张开程度。
估算技术是一种近似方式,它对RJ和DJ概率分布去卷积,然后或多或少地使用高斯RJ,根据图3所示计算BER。
关键在于,由于DJ有界、RJ是高斯分布,卷积的分布尾部在BER下限中遵守高斯RJ 分布。
从高斯分布中推导出的函数,称为互补误差函数,拟合到BERT扫描平滑的下降沿上。
然后可以推断拟合的函数,直到任何BER值,以估算眼宽。
图4: BER(T)扫描或浴缸曲线,其中误码率是样点时间位置的函数Bit Error Rati 误码率Eye Width at BER = 10-12: BER = 10-12时的眼宽Time, t, relative to the reference clock: 相对于参考时钟的时间t等时取样示波器上显示的眼图由从多个不同逻辑脉冲上取样的数据组成。
“轨迹”由参考时钟提供的触发之后的顺序时间上采集的数据点组成。
显示的是一个两维直方图,如图1和图2所示。
某个点上的颜色或亮度用来衡量该电压或功率上相对于触发信号的时间上发生的样点数量。
取样示波器可以把一个像素宽的交点块投到时间轴上,构成眼图交点直方图(图2),测量抖动输出。
眼图交点直方图近似计算信号抖动输出的概率分布函数。
在BERT扫描情况下,通过对RJ和DJ近似去卷积,可以从眼图交点直方图中估算BER,这基于这样一个事实,即在远离交点时,抖动分布主要取决于高斯RJ。
把直方图的尾部与高斯分布匹配起来,提供了一个函数,然后可以在眼图中推断这个函数,并用来估算BER一定时的眼宽。
数据集合和分析与高速取样时间间隔分析仪中基本相同。
交点直方图拟合的宗旨与拟合BERT扫描的宗旨类似,但BERT扫描技术的速度和精度都要高得多。
通过拟合直方图获得的某种高斯形状在一定程度上受到随机波动的影响;BERT扫描只取决于数据转换是否在样点上波动,而不取决于其波动的精确时间位置。
因此,使用BERT进行测量要比低概率波动强健得多,后者的拟合可能会偏向交点直方图。
部分BERT扫描的拟合速度要比交点直方图的拟合速度快得多,因为BERT数据集是在完整的数据速率上采集的,而直方图则是通过以低得多的速率对信号取样构建的。
对于高斯RJ能否精确地描绘交点直方图或BERT扫描的低BER的尾部,人们还存在争议。
这种真正的随机流程会导致抖动,抖动遵守高斯分布并不存在问题,但这些流程可能并不是抖动分布尾部的主要因素。
问题在于,多种小的效应之和,会构成接近高斯的分布。
统计理论的中心极限定理体现了这一点:数量无穷大的小流程之和会遵守高斯分布。
这意味着多个低幅度的DJ流程会卷积到一个仅在钟形曲线中心、而不是尾部接近高斯分布的分布函数。
但是尾部才是高斯假设对估算BER最重要的地方。
可能在某些情况下,真正的RJ只占似乎是高斯分布的抖动的一小部分。
如果是这样,那么用来从拟合快速BERT扫描测量和直方图拟合中估算BER所使用的技术,可能会在总体上高估实际BER。
尽管近似方法总是要小心出现错误,但在高斯分布没有很好地描述尾部时,它可能会迫使制造商设计的抖动余量超过必要的水平。
幸运的是,通过以BER = 10-12的误码率水平执行全面的BERT扫描测量,进而可以把拟合技术与整个测量进行对比,检查这种情况并不难。
在抖动分析中,有两个不同的频域:时钟频率定义了时钟信号的额定交叉时间,抖动频率则是相对于额定交叉时间,时钟交叉的时间位置变化的频域。
例如,周期抖动会导致时钟信号变化大约额定的时钟交叉量。
结果,数据信号的抖动频率限于低于时钟频率的一半。