利用MATLAB求解离散动态规划问题
基于Matlab的动态规划问题

基于Matlab的动态规划问题
基于Matlab的动态规划问题
郑怡;赵海良;徐永
【期刊名称】《重庆理⼯⼤学学报(⾃然科学版)》
【年(卷),期】2008(022)005
【摘要】介绍了动态规划的基本理论,包括动态规划的基本概念和基本思路,并利⽤Matlab对动态规划中的资源分配问题进⾏了分析,然后⽤Matlab语⾔进⾏了程序设计和计算,使复杂问题简单化,避免了繁琐的计算,从⽽使问题能更⽅便地得到解决.
【总页数】4页(152-155)
【关键词】动态规划;资源分配问题;Matlab语⾔
【作者】郑怡;赵海良;徐永
【作者单位】西南交通⼤学数学系,成都,610031;西南交通⼤学数学系,成都,610031;西南交通⼤学数学系,成都,610031
【正⽂语种】中⽂
【中图分类】O153
【相关⽂献】
1.基于MATLAB的⽔资源优化分配问题动态规划解法 [J], 李旭东
2.基于MATLAB的⽔资源配置动态规划研究 [J], 王超
3.基于MATLAB的动态规划逆序算法的实现 [J], 孙晓君
4.基于MATLAB的动态规划在热连轧板形板厚协调控制中的应⽤[J], 孙宝; 张⼩平
5.基于Matlab的动态规划顺序算法的实现 [J], 黄勇; 曲长⽂; 苏峰; 周鲁苹。
Matlab求解线性规划和整数规划问题
Matlab求解线性规划和整数规划问题标题:Matlab求解线性规划和整数规划问题引言概述:Matlab是一种功能强大的数值计算软件,广泛应用于各个领域的数学建模和优化问题求解。
本文将介绍如何使用Matlab求解线性规划和整数规划问题,并结合实例详细阐述求解过程。
一、线性规划问题的求解1.1 定义线性规划问题:线性规划是一种优化问题,目标函数和约束条件均为线性函数。
通常包括最大化或最小化目标函数,并满足一系列约束条件。
1.2 确定决策变量和约束条件:根据问题的实际情况,确定需要优化的决策变量和约束条件。
决策变量表示问题中需要求解的未知量,约束条件限制了决策变量的取值范围。
1.3 使用Matlab求解线性规划问题:利用Matlab提供的优化工具箱,使用线性规划函数linprog()进行求解。
通过设置目标函数系数、约束条件和边界条件,调用linprog()函数得到最优解。
二、整数规划问题的求解2.1 定义整数规划问题:整数规划是在线性规划的基础上,决策变量限制为整数值。
整数规划问题在实际应用中更具有实际意义,例如资源分配、路径选择等。
2.2 确定整数规划问题的特点:整数规划问题通常具有离散性和复杂性,需要根据实际情况确定整数规划问题的特点,如整数变量的范围、约束条件等。
2.3 使用Matlab求解整数规划问题:Matlab提供了整数规划函数intlinprog(),通过设置目标函数系数、约束条件和整数变量的范围,调用intlinprog()函数进行求解。
三、线性规划问题实例分析3.1 实例背景介绍:以某公司的生产计划为例,介绍线性规划问题的具体应用场景。
3.2 定义决策变量和约束条件:确定决策变量,如产品的生产数量,以及约束条件,如生产能力、市场需求等。
3.3 使用Matlab求解线性规划问题:根据实例中的目标函数系数、约束条件和边界条件,调用linprog()函数进行求解,并分析最优解的意义和解释。
基于MATLAB的动态规划常用算法的实现

基于MATLAB的动态规划常用算法的实现
孙宝;王希云
【期刊名称】《太原师范学院学报(自然科学版)》
【年(卷),期】2008(007)004
【摘要】运用MATLAB编程实现了动态规划的逆序、顺序、双向混合算法,并分别应用于求解几类典型问题,验证了该方法的有效性,同时表明该程序对求解动态规划多类典型问题是通用的,丰富了MATLAB优化工具箱,具有一定的应用价值.【总页数】5页(P26-30)
【作者】孙宝;王希云
【作者单位】太原科技大学数学系,山西太原030024;太原科技大学数学系,山西太原030024
【正文语种】中文
【中图分类】O221.3
【相关文献】
1.基于MATLAB的动态规划逆序算法的实现 [J], 孙晓君
2.动态规划的一种矩阵求解方法及MATLAB实现 [J], 李伟鹏
3.基于MATLAB动态规划中最短路线的实现程序 [J], 施益昌;郑贤斌;李自力
4.基于Matlab的动态规划顺序算法的实现 [J], 黄勇;曲长文;苏峰;周鲁苹
5.基于Matlab的动态规划算法的实现及应用 [J], 陈甜甜
因版权原因,仅展示原文概要,查看原文内容请购买。
matlab 离散微分

matlab 离散微分离散微分是数学中的一个重要概念,它在信号处理、图像处理、机器学习等领域都有着广泛的应用。
在MATLAB中,我们可以通过一些简单的函数和操作来实现离散微分的计算和应用。
在MATLAB中,常用的计算离散微分的函数有diff和gradient。
diff函数可以用于计算向量或矩阵的差分,而gradient函数则可以用于计算向量或矩阵的梯度。
这两个函数的使用方法比较简单,只需要指定待计算的向量或矩阵作为输入即可。
下面我们以一个简单的例子来说明如何使用MATLAB进行离散微分的计算。
假设我们有一个包含一维离散数据的向量x,我们想要计算其一阶导数。
我们可以使用diff函数来实现这个计算,具体的MATLAB代码如下:```MATLABx = [1 2 4 7 11];dx = diff(x);```在上述代码中,我们定义了一个向量x,其中包含了5个离散数据点。
然后我们使用diff函数计算了向量x的一阶差分,并将结果保存在变量dx中。
运行这段代码后,我们可以得到变量dx的值为[1 2 3 4],它表示了向量x的一阶导数。
除了使用diff函数,我们还可以使用gradient函数来计算向量或矩阵的梯度。
梯度表示了向量或矩阵在各个方向上的变化率。
具体的MATLAB代码如下:```MATLABx = [1 2 4 7 11];[dx, dy] = gradient(x);```在上述代码中,我们同样定义了一个向量x,然后使用gradient函数计算了向量x的梯度,并将结果保存在变量dx和dy中。
需要注意的是,由于向量x是一维的,所以梯度的计算结果也是一维的。
运行这段代码后,我们可以得到变量dx的值为[1 2 3 4],变量dy 的值为[0 0 0 0],它们分别表示了向量x在x轴和y轴方向上的变化率。
除了对向量进行离散微分的计算,我们还可以对矩阵进行离散微分的计算。
假设我们有一个包含二维离散数据的矩阵A,我们想要计算其梯度。
动态规划matlab仿真实例整理
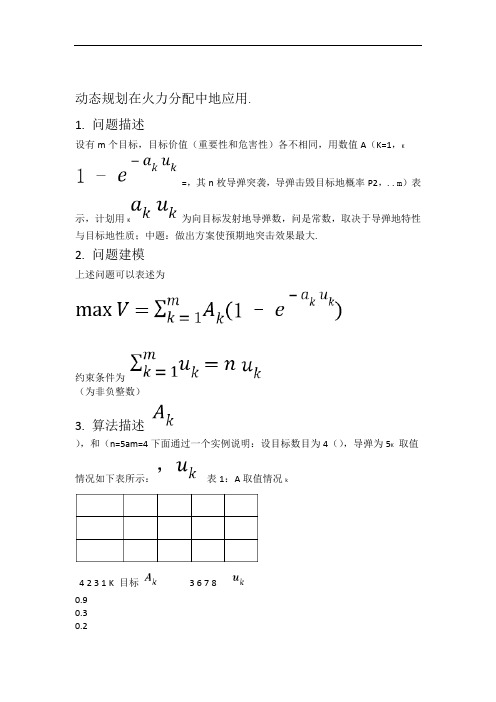
动态规划在火力分配中地应用.1.问题描述设有m个目标,目标价值(重要性和危害性)各不相同,用数值A(K=1,K=,其n枚导弹突袭,导弹击毁目标地概率P2,..m)表示,计划用K为向目标发射地导弹数,问是常数,取决于导弹地特性与目标地性质;中题:做出方案使预期地突击效果最大.2.问题建模上述问题可以表述为约束条件为(为非负整数)3.算法描述),和(n=5am=4下面通过一个实例说明:设目标数目为4(),导弹为5K取值情况如下表所示:表1:A取值情况k4 2 3 1 K 目标 3 6 7 80.90.30.2将火力分配可分为4个阶段,每个阶段指标函数为:可能取值为0,1,2,3,4,5,将函数值带人如下表:表2函数值u0 0 0 0 01.79 1 1.81 1.452.362.51 23.16 2.64 3.792.81 4.66 3 4.153.612.93 4 4.89 5.19 4.4155.445.06 5.51动态规划问题基本方程为:c=0逐次向前推一级K=4K=3K=2K=1()地最大值然后反推回去就可以获得最优地分配方案只需要求解4.Matlab仿真求解地最大值,对应取值为整数,可以采用动态规划地方法,获得与因为地最优方案function[p_opt,fval]=dynprog(x,DecisFun,SubObjFun,TransFun,ObjFun)%求解动态规划问题最小值函数k=length(x(1,:)) %判断决策级数x_isnan=~isnan(x)。
% 非空状态矩阵t_vubm=inf*ones(size(x))。
% 性能指标中间矩阵f_opt=nan*ones(size(x))。
% 总性能指标矩阵d_opt=f_opt。
%每步决策矩阵tmp1=find(x_isnan(:,k))。
% 最后一步状态向量tmp2=length(tmp1)。
% 最后一步状态个数for i=1:tmp2u=feval(DecisFun,k,x(tmp1(i),k))。
(整理)利用MATLAB进行离散控制系统模拟.
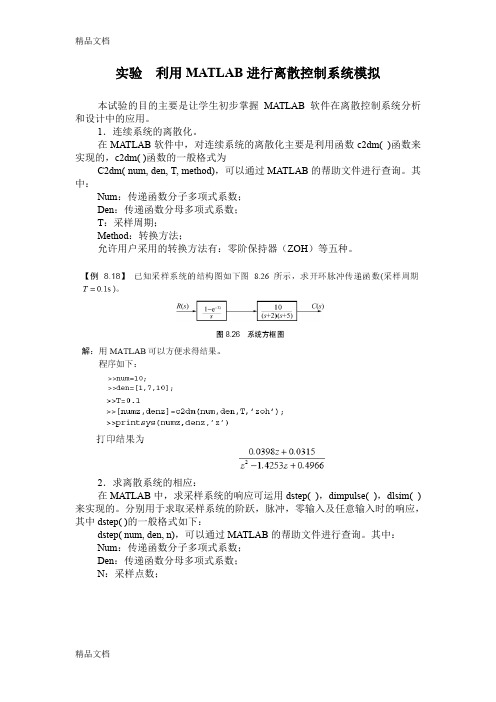
实验利用MATLAB进行离散控制系统模拟本试验的目的主要是让学生初步掌握MATLAB软件在离散控制系统分析和设计中的应用。
1.连续系统的离散化。
在MATLAB软件中,对连续系统的离散化主要是利用函数c2dm( )函数来实现的,c2dm( )函数的一般格式为C2dm( num, den, T, method),可以通过MATLAB的帮助文件进行查询。
其中:Num:传递函数分子多项式系数;Den:传递函数分母多项式系数;T:采样周期;Method:转换方法;允许用户采用的转换方法有:零阶保持器(ZOH)等五种。
2.求离散系统的相应:在MATLAB中,求采样系统的响应可运用dstep( ),dimpulse( ),dlsim( )来实现的。
分别用于求取采样系统的阶跃,脉冲,零输入及任意输入时的响应,其中dstep( )的一般格式如下:dstep( num, den, n),可以通过MATLAB的帮助文件进行查询。
其中:Num:传递函数分子多项式系数;Den:传递函数分母多项式系数;N:采样点数;3.此外,离散控制系统也可以用simulink工具箱进行仿真,仿真界面如下图(采样周期可以在对应模块中进行设定)。
1.编制程序实现上面三个仿真程序。
2.把得到的图形和结果拷贝在试验报告上。
3.在第1个例子中,改变采样周期为0.25,重新运行程序,把结果和原来结果进行比较,并说明为什么?4.在第2个例子中,改变采样点数为70,重新运行程序,把结果和原来结果进行比较,并说明为什么?同样,改变采样周期T,观察不同周期下系统阶跃响应的动态性能,分析采样周期对系统动态性能的影响。
1.1)num=10;den=[1,7,10];t=0.1[numz,denz]=c2dm(num,den,t,'zoh');printsys(numz,denz,'z')得出结果:t =0.1000num/den =0.039803 z + 0.031521------------------------z^2 - 1.4253 z + 0.49659若t改为0.25:num=10;den=[1,7,10];t=0.25[numz,denz]=c2dm(num,den,t,'zoh'); printsys(numz,denz,'z')得出结果为:t =0.2500num/den =0.18012 z + 0.10062-------------------------z^2 - 0.89304 z + 0.173772)num=10;den=[1,7,10];t=0.25;i=[0:35];time=i*t;[numz,denz]=c2dm(num,den,t,'zoh'); yc=step(num,den,time);y_zoh=dstep(numz,denz,36);[xx,yy]=stairs(time,y_zoh);plot(time,yc,'r'),holdplot(xx,yy,'r'),hold;grid采样点数改为70:num=10;den=[1,7,10];t=0.1;i=[0:70];time=i*t;[numz,denz]=c2dm(num,den,t,'zoh'); yc=step(num,den,time);y_zoh=dstep(numz,denz,71);[xx,yy]=stairs(time,y_zoh);plot(time,yc,'r'),hold周期改为0.25:3num=[0.008,0.072];den=[1,-1.905,0.905];t=0.1;i=[0:35];time=i*t;[numz,denz]=c2dm(num,den,t,'zoh'); yc=step(num,den,time);y_zoh=dstep(numz,denz,36);[xx,yy]=stairs(time,y_zoh);plot(time,yc,'r'),holdplot(xx,yy,'r'),hold;gridSimulink 实现:仿真时间:10仿真时间700:3(3) 采样周期不同,得出的Z变换也不同,说明Z变换的结果随采样周期的变化而变化。
matlab遗传算法工具箱关于离散变量优化算例
1. 引言遗传算法是一种模拟自然选择与遗传机制的优化算法,被广泛应用于离散变量优化问题的求解。
在Matlab软件中,有专门的工具箱可以支持遗传算法的实现与应用,极大地方便了工程技术人员进行离散变量优化问题的研究与应用。
本文将介绍Matlab遗传算法工具箱在离散变量优化算例中的应用,并通过具体案例来展示其实际求解效果。
2. Matlab遗传算法工具箱介绍Matlab遗传算法工具箱是Matlab软件的一个重要工具箱,它提供了丰富的遗传算法函数和工具,方便用户进行遗传算法的实现和应用。
在离散变量优化问题的求解中,用户可以利用工具箱提供的函数对问题进行建模、参数设置、运行算法等操作,从而快速高效地求解问题。
3. 离散变量优化算例为了更好地展示Matlab遗传算法工具箱在离散变量优化中的应用效果,我们选取了一个经典的离散变量优化问题作为算例,具体问题描述如下:设有一组零件需要进行装配,零件的形状和尺寸有多种选择。
每种零件的装配工艺和成本不同,需要选择最佳的零件组合方案来满足装配要求并使总成本最低。
假设可供选择的零件种类有n种,每种零件有m个备选方案,且装配每种零件的成本已知。
问应选择哪些零件及其具体方案才能使得总装配成本最低?4. Matlab遗传算法工具箱的应用为了利用Matlab遗传算法工具箱求解上述离散变量优化问题,我们可以按照以下步骤进行操作:1) 利用Matlab的数据处理工具,将零件的备选方案数据以矩阵的形式导入Matlab环境;2) 利用工具箱提供的函数对遗传算法的参数进行设置,例如选择交叉方式、变异方式、群体大小、迭代次数等;3) 利用工具箱提供的函数对离散变量优化问题进行编码和解码,以便算法能够对离散变量进行操作;4) 利用工具箱提供的函数编写适应度函数,用于评价每个个体的适应度;5) 利用工具箱提供的主函数运行遗传算法,获取最优解及其对应的总装配成本。
5. 案例求解结果分析通过上述步骤,我们在Matlab环境中成功应用遗传算法工具箱求解了离散变量优化问题。
7-8MATLAB在离散系统中的应用

y(Z)=GB(Z)R(Z)=
(
z
z(0.368 − 1)(z 2
z −
+ z
0.264) + 0.632)
= 0.368z -1+z –2 +1.4z -3+1.4z -4+1.14z -5
+…
可绘制输出响应如图
1.4 1 0.4
123 45
图7-56闭環离散控制系统单位阶跃响应
如果用Matlab的dstep函数,可很快得到离 散输出y*(t)和连续输出结果y(t)
dend=conv([1 0],dd); [numdm,dendm]=minreal(numd,dend ); % [n1,d1]=series(numdm,dendm,numg ,deng); [num,den]=cloop(n1,d1); t=[0:0.1:20]; step(num,den,t)
S tep Res pons e
From: U(1) 1.4
1.2
1
Am plitude
To : Y(1 )
0.8
0.6
0.4
0.2
0
0
5
10
15
20
25
Tim e (s e c .)
This script computes the continuous-time unit %step response for the system in example % numg=[1];deng=[1 1 0]; [nd,dd]=pade(1,2) numd=dd-264 z^ 2 −1.368z + 0.368
假定离散系统如图7-54所示。输入为单位阶 跃,可用dstep函数求输出响应。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
14 / 28
利用MATLAB求解离散动态规划问题
三、动态规划求解函数-算例1求解过程分析
1. 阶段变量k: 将问题按工程分为4个阶段,即k = 1, 2, 3, 4 2. 状态变量sk : 状 态 变 量sk 表 示 第k个 工 程 至 第4个 工 程 可 用 的 投 资 总 额 , 显 然 有s1 = 60
穷举所有可能的结果,找出其中最优值及对应的策略
3 / 28
利用MATLAB求解离散动态规划问题
二、穷举法:算例1-算法与程序
对 于上 述 问 题 , 在 穷 举 求 解 时 应 注 意 投 资 额 不 多 于60万 元 的 约 束。稍加分析便知道60万元必须全部用完没有剩余,否则结果一 定不会是最优解。因此可以写出以下程序: 输入利润函数: V 1 = [0, 20, 50, 65, 80, 85, 85]; V 2 = [0, 20, 40, 50, 55, 60, 65]; V 3 = [0, 25, 60, 85, 100, 110, 115]; V 4 = [0, 25, 40, 50, 60, 65, 70];
10 / 28
利用MATLAB求解离散动态规划问题
二、穷举法:算例2-算法与程序(续)
n = size(R, 1); Path = zeros(50, 5); Path(1 : 50, 1) = 1; Path(1 : 50, 5) = n; D = inf ∗ ones(50, 1); m = 1; for i = 1 : n; if R(1, i) ∼= inf for j = 1 : n if R(i, j) ∼= inf for k = 1 : n if R(j, k) ∼= inf Path(m, 2 : 4) = [i, j, k]; D(m) = 0; D(m) = D(m)+ R(1, i)+ R(i, j)+ R(j, k)+ R(k, n); m = m + 1; end ...
利用MATLAB求解离散动态规划问题
三、动态规划求解函数-算例1求解过程分析(续)
5. 阶段值Vk : 第k阶段的阶段值表示投资给第k个工程uk 时的利润 因此可写出以下阶段值函数: function u) V = ObjFun(k, s, 0 0 0 0 20 20 25 25 50 40 60 40 w= 65 50 85 50 80 55 100 60 85 60 110 65 85 65 115 70 w = −w; V = w(u/10 + 1, k);
输入参数: x是状态变量,一列代表一个阶段的状态 函数DecisFun(k, x, u)描述可行决策集 ObjFun(k, s, u)描述阶段值 TransFun(k, s, u)描述状态转移方程 输出变量: p opt =[序号组,状态变量组,最优决策组,阶段值组] fval也是一个列向量,表示最优值
15 / 28
利用MATLAB求解离散动态规划问题
三、动态规划求解函数-算例1求解过程分析(续)
3. 决策变量uk : 允许决策集:0 ≤ uk ≤ sk ,特别地,当k = 4,uk = sk 因此可写出以下可行决策集函数: function u = DecisFun(k, s, u) if k == 4 u = s; else u = 0 : 10 : s; end
19 / 28
利用MATLAB求解离散动态规划问题
三、动态规划求解函数-算例1求解过程分析(续)
调用动态规划求解函数: [ p opt, fval ] = dynprog(s, DecisFun , ObjFun , TransFun ) 1 2 p opt = 3 4 fval = −160 对于fval,因为之前把阶段值转变为负值,这个结果是-160,而对 于我们的问题中应是160。 运用动态规划求解函数求解总共耗时0.017秒,相比穷举法耗时更 多,因为在阶段数和状态数较少时,求解函数不能体现出优势, 调用函数的过程涉及各种参数的传递和运算,这是相对比较耗时 的。 60 40 40 10 20 0 30 10 −50 0 −85 −25
4 / 28
利用MATLAB求解离散动态规划问题
二、穷举法:算例1-算法与程序(续)
m = 1; J = zeros(84, 1); U = zeros(84, 4); for i = 1 : 7 for j = 1 : 7 for k = 1 : 7 for l = 1 : 7 if i + k + j + l == 10 J (m) = V 1(i) + V 2(j) + V 3(k) + V 4(l); U (m, 1) = i; U (m, 2) = j; U (m, 3) = k; U (m, 4) = l; m = m + 1; else continue; end ...
[inf , 5, 3, inf , inf , inf , inf , inf , inf , inf , inf inf , inf , inf , 1, 3, 6, inf , inf , inf , inf , inf inf , inf , inf , inf , 8, 7, 6, inf , inf , inf , inf inf , inf , inf , inf , inf , inf , inf , 6, 8, inf , inf inf , inf , inf , inf , inf , inf , inf , 3, 5, inf , inf R = inf , inf , inf , inf , inf , inf , inf , inf , 3, 3, inf inf , inf , inf , inf , inf , inf , inf , inf , 8, 4, inf inf , inf , inf , inf , inf , inf , inf , inf , inf , inf , 3 inf , inf , inf , inf , inf , inf , inf , inf , inf , inf , 2 inf , inf , inf , inf , inf , inf , inf , inf , inf , inf , 2 inf , inf , inf , inf , inf , inf , inf , inf , inf , 态规划问题
二、穷举法:算例2
例 6.1 最短路问题。如下图所示,其中小圆圈称为点,两点间的连线称 为弧,弧上的数字称为弧长,箭头表示前进方向。要寻找一条从 起点A到终点E的连通弧,使其总弧长最短。
7 / 28
利用MATLAB求解离散动态规划问题
二、穷举法:算例2
试图利用MATLAB并用最简单易懂的方法解决讲义中所有例题与 练习
2 / 28
利用MATLAB求解离散动态规划问题
二、穷举法:算例1
例 2.1 动 态 规 划 讲 义 第35页 习 题2, 设 国 家 拨 给60万 元 投 资 , 供 四 个 工 程扩建使用,每个工程扩建后的利润与投资额的大小有关,投资 后的利润函数如下表所示。问如何投资使得总利润最大化? 利润\投资 v1 (x) v2 (x) v3 (x) v4 (x) 0 0 0 0 0 10 20 20 25 25 20 50 40 60 40 30 65 50 85 50 40 80 55 100 60 50 85 60 110 65 60 85 65 115 70
12 / 28
利用MATLAB求解离散动态规划问题
二、穷举法:优缺点
优点: 程序简单,容易理解;在阶段数量与状态数量并不很大时运算速 度快
缺点: 并未运用动态规划思想,对不同问题通用性低,程序需要较大改 动
13 / 28
利用MATLAB求解离散动态规划问题
三、动态规划求解函数
function [ p opt, fval ] = dynprog(x, DecisFun, ObjFun, TransFun)
18 / 28
利用MATLAB求解离散动态规划问题
三、动态规划求解函数-算例1求解过程分析(续)
6. 各阶段状态变量可能取值: 由已知: s1 = {60} s2 = {0, 10, 20, 30, 40, 50, 60} s3 = {0, 10, 20, 30, 40, 50, 60} s4 = {0, 10, 20, 30, 40, 50, 60} 因此状态变量可能的取值可以描述为: s = nan ∗ ones(7, 4); s(1, 1) = 60; s(:, 2) = [0 10 20 30 40 50 60] ; s(:, 3) = [0 10 20 30 40 50 60] ; s(:, 4) = [0 10 20 30 40 50 60] ;
16 / 28
利用MATLAB求解离散动态规划问题
三、动态规划求解函数-算例1求解过程分析(续)
4. 状态转移方程Tk : 显然有:sk+1 = sk − u 因此可写出以下状态转移函数: function s next = TransFun(k, s, u) s next = s − u;
17 / 28
在 开 始 编 程 求 解 之 前 需 要 先 简 单 分 析 一下 题 目的 情 景 , 以 便 简 化求解流程。稍加分析就能发现,其实这个问题只需要做三次决 策 , 分别 在A、B和C阶 段 , 行 进 到D阶 段 以 后 下一 步 自 然 就 只 能 到达E点,也就是终点。 根据以上分析以及最短路问题的特点,将各结点用数字标明如下 图:
9 / 28
利用MATLAB求解离散动态规划问题
二、穷举法:算例2-算法与程序
在上面的带权的状态转移矩阵中,若两个结点间不能相互到达或 按着题给示意图的方向到达则留空,若能够到达,则表格中的数 值代表弧长。注意这里的到达关系是单项的,只能顺着题给示意 图的方向行进。 对应上面的状态转移矩阵,在MATLAB中对应初始化,其中inf代 表无穷大数,表示两个结点之间不能相互到达或不能按题给示意 图方向到达: