果蔬采摘机器人研究进展
果蔬采摘机器人研究进展
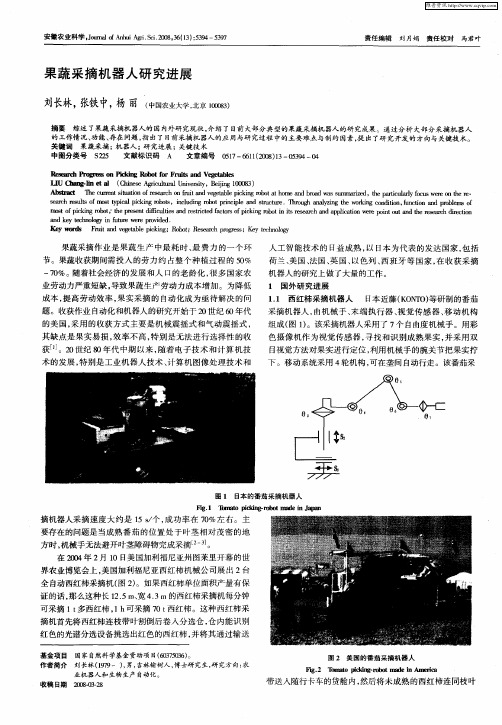
图 1 日本 的番 茄 采摘 机 器 人 rg1 Tma i rb tl r nJpn i. o t p o 曲 0o lml aa t ei
摘机器人采 摘 速度 大约 是 1 / , 5s个 成功 率在 7 %左 右 。主 , 0
要存在 的问题 是当成 熟 番茄 的位 置处 于 叶茎 相对 茂密 的地 方时 , 械手无法避 开叶茎障碍物 完成采摘 _ 3。 机 2J -
,
s rhrsl f i ty i l i i bt,icuigrbt r c l ads utr. Iu aaymgt ok gcnio , ntnadpo l f e c ut o t pc c n r o nldn oo pi ie n t c e 皿l 曲  ̄ l ewri odt n f ci n rb ms a e s n ̄ t a p k g o s np r u D z h n i u o e o
Ab ta t Th u rn i aino sac nfut n e ea l ikn o o t o n ra w ssn a ie te p riu a l o u e e o h ℃. src ec re tst t f ee rho r ia dvg tbepc igrb t mea d bod a u m,rzd h a t lryfc sw r nt eI u o r ah c
目视觉 方法对果实进行 定位 , 利用机械 手 的腕关 节把果实 拧 下 。移 动系统采用 4轮机构 , 可在垄 间 自动行走 。该 番茄采
其 缺点是 果 实易 损 , 率不 高 , 效 特别 是无 法进行 选择 性 的收
获u 。2 世 纪 8 0 J 0年代 中期 以来 , 随着 电子 技术 和 计算 机 技 术 的发展 , 别是 工业 机器 人技术 、 算机 学 。 ma A hi g .c. O 。 (3 :34— 37 J a 0 nu A r Si O83 1)59 59  ̄ lf i 2 6
果树采摘机器人的发展现状及运动学分析
果树采摘机器人的发展现状及运动学分析专业:机械制造与自动化学生:张长峰指导老师:周威铎完成日期:2013.4.10摘要果园收获作业机械化、自动化是广大果农关注的热点问题。
进行果树采摘机器人研究,不仅对于适应市场需求、降低劳动强度、提高经济效率有着一定的现实意义,而且对于跟踪世界农业新技术、促进我国农业科技进步,加速农业现代化进程有着重大的意义。
果树采摘机器人是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统,它是由机械手固定在履带式移动平台上构成的一类特殊的移动机器人系统。
本文在以自行设计的机器人机械结构为研究对象,对果树采摘机器人的控制系统进行了分析、研究和设计,并对采摘机器人避障技术进行了探讨。
主要工作如下:分析了果树采摘机器人机械结构,介绍了机器人运动学理论,根据自行设计的5自由度机械臂机械特性,采用几何结构算法,建立了果树采摘机器人机械臂的正、逆运动学方程。
关键词:果树采摘机器人,机械结构,运动学分析等等。
ABSTRACTOrchard mechanized and automation harvesting operations have become the hot issue of majority fruit growers concerned.Develop the fruit harvesting robot research not only has a certain degree of practical significance to meet market demand and reduce labor intensity and improve economic efficiency, but also can to track new agricultural technologies of the world. It is important to promote China's agricultural scientific and technological progress, accelerate the agricultural modernization process.Fruit harvesting robot is an integrated system that has multiple functions such as environmental apperceive,dynamic decision making, planning conduct control and implementation. It is a special kind of mobile robot system that the mechanical hand was fixed in the track type mobile platform. This paper was supported by the National “863”Project: “research on fruit harvesting robot’s key technologies”. A self-designed robot mechanical structure was uesd as the study object.Analysis, research and design was progressed for the fruit harvesting robot's control system. The adaptive fuzzy PID controller was composed by PID control method combined with fuzzy logic control method and the controller was used in fruit harvesting robot visual servo control.At the same time the technology of harvesting robot’s control and obstacle avoidance was analysed.The main research contents as follows:the mechanical structure of the fruit harvesting robot was analysed and the theory of robot kinematics was introduced. Based on theself-design 5 degrees of freedom robot manipulator’s mechanical properties, the fruit harvesting robot’s positive and inverse kinematics equations were found using the geometric structure of the algorithm.KEY WORDS: fruit harvesting robot, obstacle avoidance, sensor and so on.目录摘要 (2)ABSTRACT (3)第一章农业采摘机器人的发展及研究现状 (5)1.1 农业采摘机器人的研究意义 (5)1.2 农业采摘机器人的特点 (6)1.3 农业采摘机器人国内外研究进展 (6)第二章农业采摘机器人研究存在的问题与解决方法 (9)2.1 存在的技术难题 (9)2.2 技术难题解决方法 (9)2.3 本设计主要研究内容 (9)第三章果树采摘机器人机械结构 (10)第四章摄像机投影模型.............................. 错误!未定义书签。
果蔬采摘机器人研究进展与展望

果蔬采摘机器人研究进展与展望金慧迪(西北农林科技大学,机械与电子工程学院,712100)摘要:本文主要介绍了果树采摘机器人的特点及国内和美国、日本、荷兰、英国等国外的研究进展,并且对研究过程中所存在的一些问题提出了一系列的解决方案,对未来果蔬机器人的发展进行了展望。
关键词:机器人:果树采摘:研究进展在果蔬生产作业中,收获采摘约占整个作业量的40%。
采摘作业质量的好坏直接影响到果蔬的储存、加工和销售,从而最终影响市场价格和经济效益。
由于采摘作业的复杂性,采摘自动化程度仍然很低。
目前国内果蔬采摘作业基本上还是手工完成。
随着人口的老龄化和农业劳动力的减少,农业生产成本也将提高。
因此,发展机械化收获技术,研究开发果蔬采摘机器人,具有重要的意义。
一、果蔬采摘机器人的特点1.1 作业对象的非结构性和不确定性果实的生长是随着时间和空间而变化的,生长的环境是变化的、未知的和开放性的,直接受土地、季节和天气等自然条件的影响。
这就要求果蔬采摘机器人不仅要具有与生物体柔性相对应的处理功能,而且还要能够顺应变化无常的自然环境,在视觉、知识推理和判断等方面具有相当高的智能。
1.2 作业对象的娇嫩性和复杂性果实具有软弱易伤的特性,必须细心轻柔地对待和处理。
且其形状复杂,生长发育程度不一,相互差异很大。
果蔬采摘机器人一般是作业、移动同时进行,行走不是连接出发点和终点的最短距离,而是具有狭窄的范围、较长的距离及遍及整个田间表面等特点。
1.3 良好的通用性和可编程性由于果蔬采摘机器人的操作对象具有多样性和可变性,要求具有良好的通用性和可编程性。
只要改变部分软、硬件,变更判断基准,变更动作顺序,就能进行多种作业。
例如,温室果蔬采摘机器人,更换不同的末端执行器就能完成施肥、喷药和采摘等作业。
1.4 操作对象和价格的特殊性果蔬采摘机器人操作者是农民,不是具有机电知识的工程师,因此要求果蔬采摘机器人必须具有高可靠性和操作简单的特点;另外,农业生产以个体经营为主,如果价格太高,就很难普及。
采摘机器人的研究进展与现状分析

谢谢观看
在传感器技术方面,采摘机器人需要使用多种传感器来获取作物的位置、颜色、 大小等信息。例如,机器视觉技术可以通过分析图像中的颜色和形状来确定目 标作物的位置,而深度传感器则可以获取作物的三维信息。这些传感器技术的 结合使得采摘机器人能够更加准确地识别和定位目标作物。
在人工智能方面,采摘机器人的智能化程度越来越高。通过机器学习算法的训 练,机器人可以学习如何识别作物并进行采摘。同时,机器人还可以根据环境 因素(如天气、光照等)的变化来调整自身的采摘策略,以适应不同的采摘环 境。
2、智能化程度的进一步提高:未来的采摘机器人将具备更加智能化的算法和 传感器技术,以便更好地适应各种不同的采摘环境和任务。例如,通过使用更 加先进的机器学习算法和计算机视觉技术,机器人将能够更加准确地识别和定 位目标作物,并自动调整自身的采摘策略以适应不同的环境因素。
3、移动性和灵活性的进一步提升:未来的采摘机器人将具备更加灵活的机械 臂和传感器系统,以便更好地适应各种不同的采摘任务。例如,通过使用可折 叠式的机械臂和传感器系统,机器人将能够在不同的采摘场景中自由切换姿态 和位置,从而提高采摘效率和质量。
2、遥控与远程监控技术
随着无线通信技术的发展,遥控与远程监控技术也被广泛应用于移动式采摘机 器人。操作者可以通过手机或电脑对机器人进行远程操控,实时获取机器人的 工作状态、位置信息以及故障预警等数据,实现对机器人高效管理和监控。
3、人工智能算法的优化与改进
针对采摘机器人视觉识别、路径规划等关键问题,人工智能算法不断得到优化 与改进。深度学习算法的应用已经从传统的卷积神经网络(CNN)扩展到强化 学习、迁移学习等多种领域,提高了机器人的自主性和适应能力。
四、结论
移动式采摘机器人的研究和发展为现代农业提供了强有力的支持。尽管现有的 研究已经取得了显著成果,但仍存在许多挑战和问题需要解决。未来研究应多 传感器融合与信息融合技术的进一步发展、算法的持续优化以及远程监控技术 的深入研究等方面,以提升采摘机器人的工作效率和智能化水平。随着科技的 不断进步和创新,相信移动式采摘机器人的应用和发展将会为现代农业带来更 加美好的未来。
农业果树采摘机器人功能实现及试验研究

农业果树采摘机器人功能实现及试验研究随着科技的不断发展,人工智能和机器人技术的应用已经渗透到各个领域。
在农业领域,果树采摘一直是一项繁重而耗时的任务,因此研发一种能够自动采摘果实的机器人成为了人们的需求。
本文将介绍农业果树采摘机器人的功能实现及试验研究。
农业果树采摘机器人的功能实现主要包括以下几个方面:1. 视觉识别:机器人需要具备识别果实的能力,可以通过摄像头和图像识别技术来实现对果实的识别和定位。
2. 机械臂操作:机器人需要配备灵活的机械臂,能够准确地定位和采摘果实,同时能够适应不同形状和大小的果实。
3. 自动导航:机器人需要具备自动导航的能力,能够在果园中自主行走,并找到需要采摘的果树。
4. 数据记录和分析:机器人需要记录采摘的果实数量和质量数据,可以通过传感器和数据处理技术来实现数据的记录和分析。
以上功能的实现需要依赖于人工智能技术和机器人控制技术的发展,是一项综合性较强的工程问题。
在实际研发过程中,需要充分考虑果实的特点和果树采摘的实际操作场景,确保机器人能够在不同的环境下稳定运行和准确采摘果实。
针对农业果树采摘机器人的功能实现,一些研究机构和企业已经进行了试验研究。
他们通过对机器人的设计和优化,以及对果树采摘过程的分析和实验验证,取得了一些初步的成果。
以下是一些典型的试验研究案例:1. 中国农业大学团队在柑橘采摘机器人方面的研究中,通过对柑橘的特征和果实生长规律进行深入研究,结合视觉识别和机械臂操作技术,实现了柑橘的自动采摘。
他们利用机器学习算法对柑橘的外观特征进行识别,再通过机械臂精准地采摘果实,取得了较好的效果。
2. 日本岩手大学的研究团队开发了一种适用于苹果采摘的机器人。
他们利用高精度的摄像头和三维感知技术,能够在苹果树上准确识别并定位果实,然后通过先进的机械臂技术进行采摘。
他们进行了大量的实地测试,并取得了令人满意的结果。
3. 美国加州大学伯克利分校的研究团队开发了一种可机器人在葡萄园中自主行走并采摘葡萄的系统。
果蔬采摘机器人

图像分割实验结果及讨论
目标分割实验结果
返回
农业机器人的发展与展望
• 发展
目前,大部分果蔬采摘机器人还处于研究阶段,离实用化 和商品化还有一定的距离。其主要原因是: 1.机器人智能化程度没有达到农业生产的要求。农业生产 的非结构性和田间工作的不确定性要求采摘机器人具有较 高的的智能和柔性生产的能力。 2.采摘效率不高,普遍低于人工采摘。这主要是由于图像 处理时间较长,以及机器人的自由度多,对其控制需要话 费较长时间。 3.机器人的制造成本较高,而且其应用的季节性较强,使 用效率较低。
• 国内外发展现状
• 技术原理
• 农业机器人的发展与展望
• 1. 1984年,日本京都大学的川村等人开始开始了 对番茄采摘机器人的研究,并研制出一台具有5自 由度关节型机械手的机器人。
• 2 .近藤等人研制出气吸式草莓采摘机器人,针对 特定栽培模式---坡面上种植和平面种植,研制出 了3种草莓采摘机器人并分别进行了实验。
在第13届中国(寿光)国际蔬菜科技博览会上, 蔬菜机器人在采摘西红柿
二、草莓采摘机器人
自动草莓采摘机器人.MP4
(一)果蔬采摘机器人定位系统 1.激光扫描测距技术
这种技术利用一束激光在物体表面逐点扫描,根 据各点反射的信息判别物体的形状及空间位置。 其测距原理有三种:脉冲飞行时间测距、相位差 测距和差频测距。
• 3 .荷兰农业环境工程研究所研制出一种多功能黄 瓜采摘机器人。机械手有7个自由度,采用三菱 RV-E26自由度机械手,在底座上增加了1个线性 滑动由度,采摘成功率约为80%,每采摘1条黄瓜 需时间45s。
• 4. 日本冈山大学研制的葡萄采摘机器人 采用5自 由度的极坐标机械手。视觉传感器一般采用彩色 摄像机。该机器人的特点是,为了提高使用效率, 开发了多种末端执行器,除了能完成采摘作业,更 换其他的末端执行器还可以完成喷雾、 套袋和修 剪枝叶等作业 • 5 .以色列和美国联合研制了一台甜瓜采摘机器人。 该机器人主体架设在以拖拉机牵引为动力的移动 平台上 ,采用黑白图像处理的方法进行甜瓜的识 别和定位 ,并根据甜瓜的特殊性来增加识别的成 功率。试验表明 ,该机器人可以完成 85%以上的 田间甜瓜的识别 返回
蔬果采摘机器人的研究进展与展望

蔬果采摘机器人的研究进展与展望随着全球人口的增长和营养素需求的增加,农业生产的规模和效率成为重要的问题。
在传统的农业生产过程中,蔬果采摘是一个人工劳动密集的环节,需要大量的人力资源和时间。
为了提高农业生产效率和减轻人力负担,蔬果采摘机器人成为了一个备受关注的研究领域。
本文将就蔬果采摘机器人的研究进展和展望进行论述。
1. 研究现状目前,蔬果采摘机器人的研究日益进展,研究内容包括机器人的设计和控制方法。
设计方面,采用机器视觉和智能算法来指导机器人的动作,使得机器人能够识别目标对象和进行自主移动。
控制方面,主要是通过传感器和执行器来实现机器人的操作,并且配备了控制系统来监测机器人的运行状态和调节机器人的行为。
在机器人的设计中,机器人的形状和结构根据目标种类的不同而有所不同,例如森林生长在土壤中的蔬菜采收机器人更具有穴居虫的形状,蔬菜的枝段收割机器人的形状则稍微弯曲,以适应蔬菜底部和的生长环境。
在机器人控制方面,对比机电传动和液压驱动,由于空气动力学的优越性和绿色环保的考虑,电动化已经成为非常流行的选择。
传感器方面,蔬果采摘机器人配备的传感器主要包括相机、雷达和超声波传感器等,可以提供足够的环境感知,使得机器人能在不同种类蔬果的环境下进行高效采摘。
此外,一个完整的采摘过程,机器人在触摸目标作物时,应同时计算出环境中其他植物利用立体视觉技术将其识别出来,以避免机器人伤害到不成熟的作物。
目前,蔬果采摘机器人具备高速度和精准性,能够快速地对任何大小和类型的蔬果进行采摘工作。
与传统的人工采摘相比,机器人能够实现快速、准确的采摘,提高了农产品质量和生产效率。
机器人在农业生产中的应用,也是社会和环境可持续发展的一个重要体现。
2. 展望未来虽然目前蔬果采摘机器人取得了一定的成果,但它依然存在一些挑战和困难。
其一是机器人的效率问题。
机器人处理速度还不够快,容易出现执行器动作不够精确、指向不准确等问题,导致采摘效果较差。
关于果蔬采摘机器人的

传感器技术
传感器用于检测果蔬的位 置、大小、成熟度等信息 ,为机器人采摘提供数据 支持。
控制器
控制器是机器人的大脑, 负责接收传感器信号,根 据预设程序控制机器人的 运动和采摘操作。
采摘技术原理
识别与定位
通过图像处理和机器学习技术,机器人能够识别 和定位果蔬的位置。
采摘策略
根据果蔬的形状和成熟度,机器人采用不同的采 摘策略,如夹持、切割或震动等。
对未来研究的建议
• 技术改进与创新:进一步研究新型的传感器和识别技术,提高果蔬采摘机器人 的识别准确率和作业效率。同时,需要加强机器人的稳定性和耐久性,以便更 好地适应各种环境和气候条件。
• 智能化与遥控操作:研究果蔬采摘机器人的智能化技术,使 其能够自主决策和调整作业参数,提高采摘的自动化程度。 此外,开发远程遥控操作系统,使得操作员可以在远离采摘 现场的地方进行实时监控和操作。
国内外发展现状
国外
果蔬采摘机器人在欧美、日本等发达 国家已经得到广泛应用,技术成熟, 效率高。
国内
随着农业现代化的推进,我国也在逐 步推广果蔬采摘机器人技术,但整体 发展水平相对较低。
面临的问题与挑战
技术难题
果蔬采摘机器人需要解决复杂的环境感知、路径规划、精准控制 等技术难题,实现高效、准确的采摘。
技术创新推动
技术的不断创新和进步将为果蔬 采摘机器人市场提供更多机会和 空间,推动市场发展壮大。
政策支持
政府对农业现代化的支持将为果 蔬采摘机器人市场提供政策保障 和资金支持。
对农业的影响和意义
提高采摘效率
促进农业现代化
果蔬采摘机器人能够快速、准确地完成采 摘任务,提高采摘效率,降低人工成本。
果蔬采摘机器人的推广应用将有助于推动 农业现代化进程,提升农业生产效率和产 值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
果蔬采摘机器人研究进展刘长林,张铁中,杨丽(中国农业大学,北京100083)摘要 综述了果蔬采摘机器人的国内外研究现状,介绍了目前大部分典型的果蔬采摘机器人的研究成果。
通过分析大部分采摘机器人的工作情况、功能、存在问题,指出了目前采摘机器人的应用与研究过程中的主要难点与制约因素,提出了研究开发的方向与关键技术。
关键词 果蔬采摘;机器人;研究进展;关键技术中图分类号 S 225 文献标识码 A 文章编号 0517-6611(2008)13-05394-04Research Progress on P icking R obot fo r F ruits and V eg etables LIU C ha ng lin et al (Chinese Agricultural University,Beiji ng 100083)Abstract The current si tuation of research on frui t and vegetable pickin g robot at home and b roadwas su mm ariz ed,the particularly focuswere on the re search results of most typical picking robots,i ncl uding robot principle an d structure.Through an alyzing the working condi tion,functi on and p roblems of m os t of picking robot,the p resent difficulties and restricted factors of pickin g robot in its research and ap plication were point ou t and the research directi on and key tech nol ogy i n future were provi ded.Key w ords Fruit and vegetable picki ng;Robot;Research progress;Key tech nol ogy果蔬采摘作业是果蔬生产中最耗时、最费力的一个环节。
果蔬收获期间需投入的劳力约占整个种植过程的50%~70%。
随着社会经济的发展和人口的老龄化,很多国家农业劳动力严重短缺,导致果蔬生产劳动力成本增加。
为降低成本,提高劳动效率,果实采摘的自动化成为亟待解决的问题。
收获作业自动化和机器人的研究开始于20世纪60年代的美国,采用的收获方式主要是机械震摇式和气动震摇式,其缺点是果实易损,效率不高,特别是无法进行选择性的收获[1]。
20世纪80年代中期以来,随着电子技术和计算机技术的发展,特别是工业机器人技术、计算机图像处理技术和人工智能技术的日益成熟,以日本为代表的发达国家,包括荷兰、美国、法国、英国、以色列、西班牙等国家,在收获采摘机器人的研究上做了大量的工作。
1 国外研究进展1.1 西红柿采摘机器人 日本近藤(KO NTO)等研制的番茄采摘机器人,由机械手、末端执行器、视觉传感器、移动机构组成(图1)。
该采摘机器人采用了7个自由度机械手。
用彩色摄像机作为视觉传感器,寻找和识别成熟果实,并采用双目视觉方法对果实进行定位,利用机械手的腕关节把果实拧下。
移动系统采用4轮机构,可在垄间自动行走。
该番茄采图1 日本的番茄采摘机器人Fig.1 T o ma to p ic king ro bo t made in Ja pa n摘机器人采摘速度大约是15s/个,成功率在70%左右。
主要存在的问题是当成熟番茄的位置处于叶茎相对茂密的地方时,机械手无法避开叶茎障碍物完成采摘[2-3]。
在2004年2月10日美国加利福尼亚州图莱里开幕的世界农业博览会上,美国加利福尼亚西红柿机械公司展出2台全自动西红柿采摘机(图2)。
如果西红柿单位面积产量有保证的话,那么这种长12.5m 、宽4.3m 的西红柿采摘机每分钟可采摘1t 多西红柿,1h 可采摘70t 西红柿。
这种西红柿采摘机首先将西红柿连枝带叶割倒后卷入分选仓,仓内能识别红色的光谱分选设备挑选出红色的西红柿,并将其通过输送基金项目 国家自然科学基金资助项目(60375036)。
作者简介 刘长林(1979-),男,吉林榆树人,博士研究生,研究方向:农业机器人和生物生产自动化。
收稿日期 2008 0328图2 美国的番茄采摘机器人Fig.2 T o ma to p ic king ro bo t made in America带送入随行卡车的货舱内,然后将未成熟的西红柿连同枝叶安徽农业科学,Jou rn al of An hu i A gri.Sci.2008,36(13):5394-5397 责任编辑 刘月娟 责任校对 马君叶一道粉碎,喷撒在田里作肥料[4]。
1.2 茄子采摘机器人 日本国立蔬菜茶叶研究所与岐阜大学联合研制了茄子采摘机器人。
机器人由CCD 机器视觉系统、5自由度工业机械手、末端执行器以及行走装置组成,作业对象是温室中按照V 形生长方式种植的Se nryo 2号茄子。
该机器人的末端执行器设计复杂,包括4个手指、2个吸嘴、2个诱导杆、气动剪子和光电传感器(图3)。
在实验室中进行了试验,采摘成功率为62.5%,工作速度为64.1s/个。
影响成功率的主要原因是机器视觉系统对采摘位置的判断不正确;同时,视觉系统占用了72%的工作时间(46.1s),也是影响整个机器人采摘效率的主要因素[5-8]。
图3 日本的茄子采摘机器人Fig.3 Eg g plan t picking robo t mad e in J apa n1.3 甘蓝采摘机器人 日本国立农业研究中心的Muraka mi等研制了甘蓝采摘机器人,由极坐标机械手、4个手指的末端执行器、履带式行走装置和CCD 机器视觉系统组成,整个系统采用液压驱动(图4)。
系统利用人工神经网络(NN 算法)提取果实的二值图像,采用模板匹配的方法识别合格的甘蓝。
试验表明,采摘的成功率为43%,工作速度为55s/个。
影响成功率的主要原因是光照条件的不稳定、超声波测距传感器的误差、叶子的遮挡以及机械故障等[9]。
图4 日本的甘蓝采摘机器人Fig .4 Cabba g e picking rob ot ma de in J a pan1.4 葡萄采摘机器人 日本冈山大学研制出一种用于果园棚架栽培模式的葡萄收获机器人,机械部分是一个具有5个自由度的极坐标机械手,具有4个旋转关节(其中腰部1个、肩部1个、腕部2个)和1个棱柱型的直动关节(图5)。
这种结构使得机器人在葡萄架下行走时能够有效地工作,旋转关节可以以不同的速度旋转,直动关节可以采用简单的控制方法来获得较高的速度。
为了提高使用率,更换不同的末端执行器,还可以完成喷雾、套袋和剪枝等作业[10]。
1.5 黄瓜采摘机器人 日本的近藤直等研制的黄瓜采摘机器人,采用三菱MI TS UBIS HI RV E2型六自由度工业机器人,利用CCD 摄像机,根据黄瓜比其叶茎对红外光的反射率高的原理来识别黄瓜、叶茎(图6)。
黄瓜、果梗的连接与番茄不同,采用剪断方法,先把黄瓜抓住,用接近觉传感器找出柄,然后剪断,采摘速度为16s/个。
由于黄瓜是长条形,受到茎叶的影响更大,所以采摘的成功率较低,大约60%。
同样,需要改进该机器人机器手的结构、采摘工作方式和避障规划功能,以提高采摘成功率,提高采摘速度[11-13]。
图5 日本的葡萄采摘机器人Fig.5 G rape picking robo t ma de in J apa n1996年,荷兰农业环境工程研究所(I MA G)研制出一种多功能黄瓜收获机器人(图7)。
该研究在荷兰2hm 2的温室里进行,黄瓜为高拉线缠绕方式吊挂生长。
该机器人利用近红外视觉系统辨识黄瓜果实,并探测其位置。
机械手只收获成熟黄瓜。
末端执行器由手爪和切割器构成。
机械手有7个自由度,采用三菱(Mi tsubishi)RV E2六自由度机械手。
该机器人视觉系统的黄瓜检测效率大于95%,采摘成功率约80%,采摘速度约为54s/个,在实验用温室中作业效果良好。
但由于采收时间过长,不能满足商用要求[3,14]。
1.6 蘑菇采摘机器人 英国Silsoe 研究院研制了蘑菇采摘机器人(图8)。
它可以自动测量蘑菇的位置、大小,并且选择性地采摘和修剪。
它的机械手包括2个气动移动关节和1个步进电机驱动的旋转关节;末端执行器是带有软衬垫的吸引器;视觉传感器采用TV 摄像头,安装在顶部用来确定蘑菇的位置和大小。
采摘成功率在75%左右,采摘速度为6.7539536卷13期 刘长林等 果蔬采摘机器人研究进展图6 日本的黄瓜采摘机器人Fig .6 Cucu mber pick ing ro bo t ma de i n Ja pan图7 荷兰的黄瓜采摘机器人Fig .7 Cu cumber pick ing ro bo t made in Neth erlands图8 英国的蘑菇采摘机器人Fig .8 Mus hro o m pickin g ro bot ma de in Britain个/s,生长倾斜是采摘失败的主要原因[16-19]。
1.7 柑橘采摘机器人 西班牙科技人员发明的这种柑橘采摘机器人主体装在拖拉机上,由摘果手、彩色视觉系统和超声传感定位器3部分组成。
它能依据柑桔的颜色、大小、形状来判断柑桔是否成熟,决定是否采摘。
采下的桔子还可按色泽、大小分级装箱。
这种采桔机器人采摘速度为1个/s,比人工提高效率6倍多[20]。
1.8 甜瓜收获机器人 以色列和美国科技人员联合开发研制了一台甜瓜采摘机器人。
该机器人主体架设在以拖拉机牵引为动力的移动平台上,采用黑白图像处理的方法进行甜瓜的识别和定位,并根据甜瓜的特殊性来增加识别的成功率。
在2个季节和2个品种的田间试验证明,甜瓜采摘机器人可以完成85%以上的田间甜瓜的识别和采摘工作[21]。
1.9 苹果收获机器人 韩国庆北大学研制了苹果采摘机器人,具有4个自由度,包括3个旋转关节和1个移动关节。
采用三指夹持器作为末端执行器,内有压力传感器避免损伤苹果。
利用CCD 摄像机和光电传感器识别果实,从树冠外部识别苹果的识别率达85%,速度达5个/s 。
该机器人无法绕过障碍物摘取苹果;对于叶茎完全遮盖的苹果,也没有给出识别和采摘的解决方法[3]。
2 国内研究进展国内在农业机器人方面的研究始于20世纪90年代中期,相对于发达国家起步较晚。