理论力学第三版 (洪嘉振) 答案第2章
理论力学第三版 (洪嘉振) 答案第1章

1⎞ ⎟ 4⎟ ∈ R 4×3 ⎟ 0 ⎟ 2⎟ ⎠
⎛2⎞ ⎜ ⎟ T a = ⎜ − 1⎟ = (2 − 1 1) ∈ R1×3 , ⎜1⎟ ⎝ ⎠ ⎛1 0 0⎞ ⎛1 0 0⎞ ⎜ ⎟ ⎜ ⎟ T E = ⎜ 0 1 0 ⎟ = ⎜ 0 1 0 ⎟ ∈ R 3×3 ⎜0 0 1⎟ ⎜0 0 1⎟ ⎝ ⎠ ⎝ ⎠ ⎛ 0 ⎜ T B =⎜ 1 ⎜ 2 ⎝ ⎛ 1 ⎜ T C =⎜ 1 ⎜ 2 ⎝ −1 − 2⎞ ⎛ 0 ⎟ ⎜ 0 3 ⎟ = ⎜ −1 ⎜− 2 −3 0 ⎟ ⎠ ⎝ −1 − 2⎞ ⎛ 1 ⎟ ⎜ 1 3 ⎟ = ⎜ −1 ⎜− 2 −3 1 ⎟ ⎠ ⎝
⎛ 0 −1 − 2⎞ ⎛ 1 ⎟ ⎜ ⎜ B = ⎜1 0 3 ⎟,C = ⎜ 1 ⎜2 − 3 0 ⎟ ⎜ 2 ⎠ ⎝ ⎝
−1 − 2⎞ ⎛ 0 −1 − 2⎞ ⎟ ⎟ ⎜ 1 3 ⎟ , D = ⎜ −1 0 3 ⎟ ⎜− 2 3 −3 1 ⎟ 0 ⎟ ⎠ ⎠ ⎝
(1) 计算 2 D ; (2) 计算 A + E 与 A − E ;验证 A + E = E + A ; (3) 计算 B + B ;由此可得到什么结论;
⎛ 0 −1 − 2⎞ ⎛ 0 −1 − 2⎞ ⎛ 0 −1 − 2⎞ ⎛ 0 1 2 ⎞ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ 3 ⎟ + ⎜ − 1 0 − 3⎟ = 0 。 3 ⎟ = ⎜1 0 B + BT = ⎜ 1 0 3 ⎟ + ⎜1 0 ⎜2 − 3 0 ⎟ ⎜2 − 3 0 ⎟ ⎜2 − 3 0 ⎟ ⎜− 2 3 0 ⎟ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠
(1)写出它的分块列矩阵aj(j=1,…,4); (2)写出它的转置矩阵,验证
理论力学第三版 (洪嘉振) 答案第6章

题解 6-9C
Δ x1
=
Δx2
−
Δx1′
cos
π 6
=
200 − 400 ⋅ 3cos π 6
=
−146.41,
Δx3 = Δx2 = 200
代入式(1)
m1Δx1 + m2Δx2 + m3Δx3 = mAΔx1 + mC Δx2 + mBΔx3 = −4 ⋅146.41 + 2 ⋅ 200 + mB ⋅ 200 = 0 可解得
30o
B
解:
如图 6-9C 所示建立惯性坐标基。
yr
令圆轮A记为B1,质心A的x坐标记为
x1;斜面记为B2,质心D的x坐标记为x2;
重物B记为B3,质心B的x坐标记为x3。系统
质心C的x坐标记为xC。系统总质量记为M,
有如下关系
∑ xC =
mi xi M
作用于质点系上外力的主矢在 x 轴上 O
的投影始终为零,系统动量在该轴上的坐
解: 对于喷气机,吸入的空气相对于飞机的速度为
vr = 660 = 185 m/s 3.6
质量的变化而引起的作用于质点的附加推力为
r F
P
=
vrPr
dm dt
则向后的推力为:
F AP
=
dm dt
v
r A
=
70 ×185
≈ 13000N
= 13kN
因为排出的质量是吸入空气和消耗燃料之和,故有向前的推力:
洪嘉振等《理论力学》第 3 版习题详解
1
6-1C 三个质量均为 m 的质点用质量不计
的刚杆连结成正三角形,边长为 b。在质心 C 建 立如图所示的连体基,矢量 zr 为正三角形的法
大学物理学(第三版)第二章课后答案

习题22.1 选择题(1) 一质点作匀速率圆周运动时,(A)它的动量不变,对圆心的角动量也不变。
(B)它的动量不变,对圆心的角动量不断改变。
(C)它的动量不断改变,对圆心的角动量不变。
(D)它的动量不断改变,对圆心的角动量也不断改变。
[答案:C](2) 质点系的内力可以改变(A)系统的总质量。
(B)系统的总动量。
(C)系统的总动能。
(D)系统的总角动量。
[答案:C](3) 对功的概念有以下几种说法:①保守力作正功时,系统内相应的势能增加。
②质点运动经一闭合路径,保守力对质点作的功为零。
③作用力与反作用力大小相等、方向相反,所以两者所作功的代数和必为零。
在上述说法中:(A)①、②是正确的。
(B)②、③是正确的。
(C)只有②是正确的。
(D)只有③是正确的。
[答案:C]2.2填空题(1) 某质点在力i x F)54(+=(SI )的作用下沿x 轴作直线运动。
在从x=0移动到x=10m的过程中,力F所做功为 。
[答案:290J ](2) 质量为m 的物体在水平面上作直线运动,当速度为v 时仅在摩擦力作用下开始作匀减速运动,经过距离s 后速度减为零。
则物体加速度的大小为 ,物体与水平面间的摩擦系数为 。
[答案:22;22v v s gs](3) 在光滑的水平面内有两个物体A 和B ,已知m A =2m B 。
(a )物体A 以一定的动能E k 与静止的物体B 发生完全弹性碰撞,则碰撞后两物体的总动能为 ;(b )物体A 以一定的动能E k 与静止的物体B 发生完全非弹性碰撞,则碰撞后两物体的总动能为 。
[答案:2;3k k E E ]2.3 在下列情况下,说明质点所受合力的特点:(1)质点作匀速直线运动; (2)质点作匀减速直线运动; (3)质点作匀速圆周运动; (4)质点作匀加速圆周运动。
解:(1)所受合力为零;(2)所受合力为大小、方向均保持不变的力,其方向与运动方向相反; (3)所受合力为大小保持不变、方向不断改变总是指向圆心的力;(4)所受合力为大小和方向均不断变化的力,其切向力的方向与运动方向相同,大小恒定;法向力方向指向圆心。
理论力学(周衍柏第三版)习题答案
v0 s 1 at1 t1 2
再由此式得 证明完毕.
a
2st 2 t1 t1t 2 t1 t 2
1.2 解 由题可知,以灯塔为坐标原点建立直角坐标如题 1.2.1 图.
1 设 A 船经过 t 0 小时向东经过灯塔,则向北行驶的 B 船经过 t 0 1 小时经过灯塔任意时刻 A 2
r
r
把③④⑦⑧代入⑤⑥式中可得
a // 2 r
1.7 解 由题可知
2 2
r
a r
x r cos ① ② y r sin
③ r cos r sin x sin r sin r 2 cos ④ cos 2r x r
对等式两边同时积分 ,可得: 1.6 解 由题可知质点的位矢速度 沿垂直于位矢速度 又因为
1 2T 2T t s c t 2 sin t 2T 2
v // r ①
v
即
r , v // r
r r
v r 即 r
dv 2kv 2 dt
y3 p 1 y 2
2 3 2
⑤
又
dv dv dy dv y dt dy dt dy x yy p
把 y 2 2px 两边对时间求导得
又因为
2 y 2 v2 x
所以
2 y
v2 y2 ⑥ 1 2 p
d 15t 0 15t
2
1 15 t 0 1 15t 2
2
- - 1- -
理论力学第三版 (洪嘉振) 答案第2章

r z
O
r y
r rOC
A
(
0 sin 30o
)
T
= 25 − 3 0 1 N
(
)
T
r x
B
r rAC r rBC
r F
30 °
(2) 由式(1)与(2)该力分别对点 O、A、B 的矩分别 为:
− 3⎞ ⎛ 4 ⎞ ⎛ 100 ⎞ ⎛ 0 3 4 ⎞⎛ ⎟ r ~ ⎟ ⎟ ⎜ ⎜ ⎟⎜ ⎜ MO (F ) = rOCF = ⎜ − 3 0 − 2⎟⎜ 0 ⎟25 = 25⎜ 3 3 − 2⎟ = ⎜ 79.9 ⎟ N⋅ m ⎟ ⎜ 4 3 ⎟ ⎜173.2⎟ ⎜ − 4 2 0 ⎟⎜ 1 ⎟ ⎠ ⎠ ⎝ ⎝ ⎠⎜ ⎝ ⎝ ⎠
r1′ = (2b a ) , r2′ = (b a )
T T
r y
r yb
r r2
r F1
两力对点 A 的矩 r r r r M Az ( F1 ) = M Az′ ( F1 ) = M Az′ ( F1x′ ) + M Az′ ( F1 y′ )
′F1x′ + x1 ′ F1 y′ = − y1 = − aF1 cos(α − β ) + 2bF1 sin(α − β ) r r r r M Az ( F2 ) = M Az′ ( F2 ) = M Az′ ( F2 x′ ) + M Az′ ( F2 y′ ) ′ = − y′ 2 F2 x′ + x2 F2 y′ = aF2 sin β − bF2 cos β
= − F1 cos α (− 2b sin β + a cos β ) + F1 sin α (2b cos β − a sin β ) = − aF1 cos(α − β ) + 2bF1 sin(α − β )
理论力学第三版课后习题答案
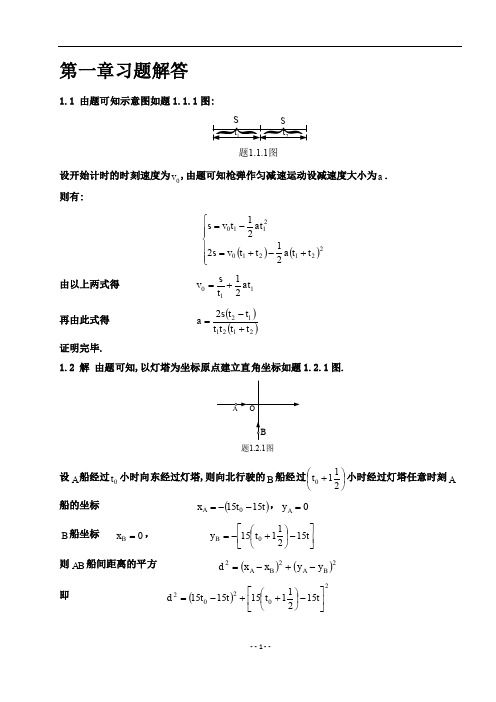
目录第一章质点力学 (2)第二章质点组力学 (56)第三章刚体力学 (74)第四章转动参考系 (105)第五章分析力学 (115)第一章 质点力学1.1 由题可知示意图如题1.1.1图:{{SSt t 题1.1.1图设开始计时的时刻速度为0v ,由题可知枪弹作匀减速运动设减速度大小为a . 则有:()()⎪⎪⎩⎪⎪⎨⎧+-+=-=221210211021221t t a t t v s at t v s 由以上两式得11021at t s v +=再由此式得()()2121122t t t t t t s a +-=证明完毕.1.2 解 由题可知,以灯塔为坐标原点建立直角坐标如题1.2.1图.题1.2.1图设A 船经过0t 小时向东经过灯塔,则向北行驶的B 船经过⎪⎭⎫ ⎝⎛+2110t 小时经过灯塔任意时刻A 船的坐标()t t x A 15150--=,0=A yB 船坐标0=B x ,⎥⎦⎤⎢⎣⎡-⎪⎭⎫⎝⎛+-=t t y B 15211150则AB 船间距离的平方()()222B A B A y y x x d -+-=即()2021515t t d -=201521115⎥⎦⎤⎢⎣⎡-⎪⎭⎫⎝⎛++t t()20202211225225675900450⎪⎭⎫ ⎝⎛++++-=t t tt t2d 对时间t 求导()()67590090002+-=t t dtd d AB 船相距最近,即()02=dtdd ,所以h t t 430=- 即午后45分钟时两船相距最近最近距离22min231543154315⎪⎭⎫ ⎝⎛⨯-⨯+⎪⎭⎫ ⎝⎛⨯=s km1.3 解 ()1如题1.3.2图第1.3题图y题1.3.2图由题分析可知,点C 的坐标为⎩⎨⎧=+=ψψϕsin cos cos a y a r x 又由于在∆AOB 中,有ϕψsin 2sin ar =(正弦定理)所以ry r a 2sin 2sin ==ψϕ联立以上各式运用1cos sin 22=+ϕϕ由此可得rya x r a x 22cos cos --=-=ψϕ得12422222222=---++r y a x y a x r y 得22222223y a x r a x y -=-++化简整理可得()()2222222234r a y x y a x -++=-此即为C 点的轨道方程.(2)要求C 点的速度,分别求导⎪⎪⎩⎪⎪⎨⎧=--=2cos sin cos 2cos sin ϕωψψϕωϕωr y r r x 其中ϕω = 又因为ψϕsin 2sin a r =对两边分别求导 故有ψϕωψcos 2cos a r =所以22y x V +=4cos sin cos 2cos sin 2222ϕωψψϕωϕωr r r +⎪⎪⎭⎫ ⎝⎛--= ()ψϕψϕϕψω++=sin cos sin 4cos cos 22r1.4 解 如题1.4.1图所示,A BOCLxθd 第1.4题图OL 绕O 点以匀角速度转动,C 在AB 上滑动,因此C 点有一个垂直杆的速度分量22x d OC v +=⨯=⊥ωωC 点速度dx d d v v v 222sec sec cos +====⊥⊥ωθωθθ 又因为ωθ= 所以C点加速度 θθθω ⋅⋅⋅⋅==tan sec sec 2d dt dv a ()2222222tan sec 2d x d x d +==ωθθω1.5 解 由题可知,变加速度表示为⎪⎭⎫ ⎝⎛-=T t c a 2sin 1π 由加速度的微分形式我们可知dtdv a =代入得dtT t c dv ⎪⎭⎫ ⎝⎛-=2sin 1π 对等式两边同时积分dt T t c dv t v⎰⎰⎪⎭⎫ ⎝⎛-=002sin 1π可得 :D Ttc Tct v ++=2cos2ππ(D 为常数)代入初始条件:0=t 时,0=v ,故c TD π2-=即⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+=12cos2T t T t c v ππ 又因为dtds v =所以=ds dt T t T t c ⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+12cos2ππ 对等式两边同时积分,可得:⎥⎦⎤⎢⎣⎡⎪⎭⎫⎝⎛-+=t T t T T t c s 2sin 22212πππ1.6 解 由题可知质点的位矢速度r λ=//v ①沿垂直于位矢速度μθ=⊥v又因为 r r λ== //v , 即r rλ=μθθ==⊥r v 即rμθθ= ()()j i v a θ r dtd r dt d dt d +==(取位矢方向i ,垂直位矢方向j ) 所以()j i i i θ r rdtd r i dt r d r dt d +=+=()dtd r dt d r dt dr r dt d j j j j θθθθ ++=i j j 2r r r θθθ -+= 故()()j i a θθθ r r r r22++-= 即 沿位矢方向加速度()2θ r ra -= 垂直位矢方向加速度()θθr r a 2+=⊥ 对③求导r rr 2λλ== 对④求导θμμθθr rr +-=2⎪⎭⎫⎝⎛+=λμμθr 把③④⑦⑧代入⑤⑥式中可得rr a 222//θμλ-= ⎪⎭⎫ ⎝⎛+=⊥r a μλμθ1.7 解 由题可知⎩⎨⎧==θθsin cos r y r x ①②对①求导θθθ sin cos r r x-= ③ 对③求导2 ④对②求导θθθcos sin r r y+=⑤ 对⑤求导θθθθθθθsin cos cos 2sin 2 r r r ry -++=⑥ 对于加速度a ,我们有如下关系见题1.7.1图题1.7.1图即⎩⎨⎧+=+=θθθθθθcos sin sin cos a a y a a x r r⑦--⑧ 对⑦⑧俩式分别作如下处理:⑦θcos ⨯,⑧θsin ⨯ 即得⎩⎨⎧+=-=θθθθθθθθθθcos sin sin sin cos sin cos cos a a y a a x r r⑨--⑩ ⑨+⑩得θθsin cos yx a r += ⑾ 把④⑥代入 ⑾得2θr r a r -= 同理可得θθθ r r a 2+= 1.8解 以焦点F 为坐标原点,运动如题1.8.1图所示]题1.8.1图则M 点坐标⎩⎨⎧==θθsin cos r y r x 对y x ,两式分别求导⎪⎩⎪⎨⎧+=-=θθθθθθcos sin sin cos r r yr r x 故()()22222cos sin sin cos θθθθθθ r r r r y xv ++-=+=222ωr r+= 如图所示的椭圆的极坐标表示法为()θcos 112e e a r +-=对r 求导可得(利用ωθ= )又因为()()221cos 111e a e e a r -+-=θ即()rer e a --=21cos θ 所以()()2222222221211cos 1sin e r e ar r e a --+--=-=θθ故有()2222224222sin 1ωθωr e a r e v +-=()2224221ea r e -=ω()()]1211[2222222e r e ar r ea --+--22ωr +()()⎥⎦⎤⎢⎣⎡--+-⋅-=2222222221121e e ar r r e e a r ω()r r a b r -=2222ω 即()r a r br v -=2ω(其中()b a e b ,1222-=为椭圆的半短轴)1.9证 质点作平面运动,设速度表达式为j i v y x v v +=令为位矢与轴正向的夹角,所以dt d v dt dv dt d v dt dv dt d y y x x j j i i v a +++==j i ⎪⎪⎭⎫ ⎝⎛++⎪⎭⎫ ⎝⎛-=θθ x y y x v dt dv v dt dv 所以[]j i a ⎪⎪⎭⎫⎝⎛++⎪⎭⎫ ⎝⎛-=θθ x yy x v dt dv v dt dv ()j i y x v v +⋅ θθ y x y y y x x x v v dt dv v v v dt dv v ++-=dtdv v dt dv v y yxx += 又因为速率保持为常数,即C C v v y x ,22=+为常数对等式两边求导022=+dtdv v dt dv v y y xx所以0=⋅v a即速度矢量与加速度矢量正交.1.10解 由题可知运动轨迹如题1.10.1图所示,题1.10.1图则质点切向加速度dtdv a t =法向加速度ρ2n v a =,而且有关系式ρ2v 2k dt dv -= ①又因为()232y 1y 1'+''=ρ②2px y 2=所以yp y =' ③ 32yp y -='' ④ 联立①②③④2322322y p 1y p 2kv dtdv⎪⎪⎭⎫ ⎝⎛+-= ⑤又dydv ydt dy dy dv dt dv =⋅=把2px y 2=两边对时间求导得pyy x= 又因为222y xv += 所以22221py v y+= ⑥ 把⑥代入⑤23223222122121⎪⎪⎭⎫ ⎝⎛+⋅-=⋅⎪⎪⎭⎫ ⎝⎛+y p y p kv dydvp y v既可化为222py dykp v dv +-= 对等式两边积分222py dykp v dv p p vu+-=⎰⎰- 所以πk ue v -=1.11解 由题可知速度和加速度有关系如图1.11.1所示题1.11.1图⎪⎪⎩⎪⎪⎨⎧====ααcos sin 2a dt dv a a r v a t n 两式相比得dtdvr v ⋅=ααcos 1sin 2 即2cot 1vdv dt r =α 对等式两边分别积分200cot 1v dv dt rv v t⎰⎰=α 即αcot 11rtv v -=此即质点的速度随时间而变化的规律.1.12证 由题1.11可知质点运动有关系式⎪⎪⎩⎪⎪⎨⎧==ααcos sin 2a dtdv a r v ①② 所以 ωθθθd dv dt d d dv dt dv =⋅=,联立①②,有ααωθcos sin 2r v d dv = 又因为r v ω=所以 θαd vdv cot =,对等式两边分别积分,利用初始条件0=t 时,0θθ=()αθθcot 00-=e v v1.13 证(a )当00=v ,即空气相对地面上静止的,有牵相绝v v v +=.式中绝v 质点相对静止参考系的绝对速度, 相v 指向点运动参考系的速度, 牵v 指运动参考系相对静止参考系的速度.可知飞机相对地面参考系速度:绝v =v ',即飞机在舰作匀速直线运动.所以飞机来回飞行的总时间v l t '=20. (b )假定空气速度向东,则当飞机向东飞行时速度01v v v +'=飞行时间1v v lt +'=当飞机向西飞行时速度0v v v v v -'=+=牵相飞行时间2v v lt -'=故来回飞行时间021v v l t t t +'=+=0v v l -'+222v v lv -''= 即2200220112v v t v v v lt '-='-'= 同理可证,当空气速度向西时,来回飞行时间2201v v t t '-=(c )假定空气速度向北.由速度矢量关系如题1.13.1图v 题1.13.1图v v v '+=0绝202v v v -'= 所以来回飞行的总时间222vv l t -'=2200220112v vt v v v l '-='-'=同理可证空气速度向南时,来回飞行总时间仍为2201v v t t '-=1.14解 正方形如题1.14.1图。
7-26C
5mv2 x I Dx I Ox
J 22 I Ox e I Dx r e
速度约束方程 v1x vOx 1 r v2 x vOx 2 e vDx v2 x 2 r e 0 由上式
v2 x 2 r e
式 1 2
2 r
I Ox r 2 2 J 2 5mr e
(11)
v1x
2 I 2 J11 2 I 2 r1 m mr m 3
将上式代入式(9) ,有
I Ox r 2 5 2I r1 2 3 m J 2 5mr e
式(2)解出 I Ox 代入上式,可解出杆 OA 的角速度为
e 0.4r , J 2 5m 2 1.6mr 2 , J1
A
题解 7-26C
1 1 2 m2r mr 2 3 12
上述 4 个方程可化为 mv1x I I Ox
J 11 I I Ox r 2
(1) (2) (3) (4) (5) (6) (7) (8)
I Oy
vOx
I Ox
I Oy
C
e
D
I Dy
v2 x
O
vOx
1
v1x
I
2
I Dx
以匀质半轮为研究对象 5m(v2 x 0) I Dx I Ox e I Dx r e J 2 2 0 I Ox 其中
2J 2 3I 2 10r e r 2 m 1 2 r 5 J 2 25mr e 2mr 2
代入 e 0.4r , J 2 5m 2 1.6mr 2 ,有
理论力学第三版课后答案第3章
r 由式(1)在 τ 向的坐标式,可得点 B 的速度 r τ : vB = vO + rω = 2rω
aw .
re vω B r vO
r n
(1)
co
τ
r
m
固定圆弧纯滚动由点 O′ 到点O,有 AD = AD′ ,即 r (φ + θ ) = Rθ ,得 rφ = (R − r )θ ,两边对时
∩
∩
题解 3-3Ca
课
r 平动参考基 e s 。 由图可知, 当连杆 B3 转过角 φ 3 ,齿轮 B2 转过角ψ 2 。
后 答
r r 基为动基 e 3 ,齿轮 B2 的连体基为动基 e 2 。过O2建立一
r x3
r x2
r y3
O1
r xs
根据啮合条件有 ψ 2 R2 = φ3 R1 。由图可知,齿轮 B2 的相
φ3
r x
得
q1 = (x A
课
y A = l sin (α − φ1 ) + l cos α sin φ1 = l sin α cos φ1 r1 连体基 e 的位形坐标阵为 y A φ1 ) = (l cos α cos φ1 l sin α cos φ1 φ1 )
T T
x A = l cos α cos φ1
r (2)对于公共基 e ,以三个连体基分别写出刚
r r r
B
r x1
α
r x2 r x3
r y3
C
体的位形坐标阵。 解:
r x
r 基 e 1 的位形为
r (1)如图 3-2Ca 所示,连体基 e 2 相对于与连体
T ρ1 0 ) , θ 2 = 2π − α B = (− l cos α
大学物理学(第三版)第二章课后答案
习题22.1 选择题(1) 一质点作匀速率圆周运动时,(A)它的动量不变,对圆心的角动量也不变。
(B)它的动量不变,对圆心的角动量不断改变。
(C)它的动量不断改变,对圆心的角动量不变。
(D)它的动量不断改变,对圆心的角动量也不断改变。
[答案:C](2) 质点系的内力可以改变(A)系统的总质量。
(B)系统的总动量。
(C)系统的总动能。
(D)系统的总角动量。
[答案:C](3) 对功的概念有以下几种说法:①保守力作正功时,系统内相应的势能增加。
②质点运动经一闭合路径,保守力对质点作的功为零。
③作用力与反作用力大小相等、方向相反,所以两者所作功的代数和必为零。
在上述说法中:(A)①、②是正确的。
(B)②、③是正确的。
(C)只有②是正确的。
(D)只有③是正确的。
[答案:C]2.2填空题(1) 某质点在力i x F)54( (SI )的作用下沿x 轴作直线运动。
在从x=0移动到x=10m的过程中,力F所做功为 。
[答案:290J ](2) 质量为m 的物体在水平面上作直线运动,当速度为v 时仅在摩擦力作用下开始作匀减速运动,经过距离s 后速度减为零。
则物体加速度的大小为 ,物体与水平面间的摩擦系数为 。
[答案:22;22v v s gs](3) 在光滑的水平面内有两个物体A 和B ,已知m A =2m B 。
(a )物体A 以一定的动能E k 与静止的物体B 发生完全弹性碰撞,则碰撞后两物体的总动能为 ;(b )物体A 以一定的动能E k 与静止的物体B 发生完全非弹性碰撞,则碰撞后两物体的总动能为 。
[答案:2;3k k E E ]2.3 在下列情况下,说明质点所受合力的特点:(1)质点作匀速直线运动; (2)质点作匀减速直线运动; (3)质点作匀速圆周运动; (4)质点作匀加速圆周运动。
解:(1)所受合力为零;(2)所受合力为大小、方向均保持不变的力,其方向与运动方向相反; (3)所受合力为大小保持不变、方向不断改变总是指向圆心的力;(4)所受合力为大小和方向均不断变化的力,其切向力的方向与运动方向相同,大小恒定;法向力方向指向圆心。
理论力学习题答案-第三版
a=
2 2 2 dv & = 2 dω 2 sec 2 θ tan θ = 2ω x d + x = ωd ⋅ 2 sec θ ⋅ sec θ ⋅ tan ⋅ θ dt d2
(
)
1.5 矿山升降机作加速度运动时,其变加速度可用下式表示:
πt ⎞ a = c⎛ ⎜1 − sin ⎟ 2T ⎠ ⎝
-5-
y A r ϕ
a
ψ
C
a
B x
O
第 1 .3 题 图
y
A
•
ω ϕ O
r
C •
a
ψ B
x
题1.3.2图
由题分析可知,点 C 的坐标为 ⎧ x = r cos ϕ + a cos ψ ⎨ ⎩ y = a sin ψ 又由于在 ∆ AOB 中,有
r 2a = sin ψ sin ϕ
sin ϕ =
(正弦定理)所以
L
A d θ Oห้องสมุดไป่ตู้
第1.4题 图
x C
B
OL 绕 O 点以匀角速度转动, C 在 AB 上滑动,因此 C 点有一个垂直杆的速度分
量
v ⊥ = ω × OC = ω d 2 + x 2 C 点速度 v= v⊥ d 2 + x2 = v ⊥ sec θ = ωd sec 2 θ = ω cos θ d
& = ω 所以 C 点加速度 又因为 θ
(
) (
)
2
rω cos ϕ ⎧& x = − r ω sin ϕ − sin ψ ⎪ ⎪ 2 cos ψ ⎨ rω cos ϕ ⎪y &= ⎪ ⎩ 2
其中
ω =ϕ &
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
洪嘉振等《理论力学》第 3 版习题详解
1
2-5C 图示一结构,在端部 C 处作用一力 F , F=50N。 求该力分别对点 O、A、B 的矩。
2m A
r
r z
O
r y
r x 3m
B
4m
r F
30 °
C
题 2-5C
解 1: r r r 如图 2-5Ca 所示,定义矢量 rOC , rAC 与 rBC 。在图示 2-5Ca 坐标系下的坐标阵分别为: T rOA = (2 4 − 3) m ⎫ ⎪ ⎪ T rAC = (0 4 − 3) m ⎬ (1) ⎪ T rBC = (0 4 0 ) m ⎪ ⎭ r 力 F 的坐标阵为
1
r 用一个力 F 。
2-4C 如图所示,长方体的边长为 a、b、c。沿 AC 作
r z
C
(1) 试求该力对点 O 的矩; (2) 试求该力对 x、y 和 z 轴的矩。
O
B
r F
A
题 2-4C
r x
r y
解:
r T (1) 如图 2-4C,点 A 的矢径 rA 的坐标阵为 rA = (a b 0 ) ,定义力 r r rAC F=F rAC r 其中矢量 rAC 的坐标阵与模分别为:
C
题解 2-5Ca
− 3⎞ ⎛ 0 3 4 ⎞⎛ ⎛ 4 ⎞ ⎛ 100 ⎞ ⎟ r ~ ⎜ ⎟⎜ ⎜ ⎟ ⎜ ⎟ M A ( F ) = rAC F = ⎜ − 3 0 0 ⎟⎜ 0 ⎟25 = 25⎜ 3 3 ⎟ = ⎜129.9 ⎟ N⋅ m ⎟ ⎜ − 4 0 0 ⎟⎜ ⎜ 4 3 ⎟ ⎜173.2 ⎟ 1 ⎟ ⎝ ⎠⎜ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ − 3⎞ ⎛ 0 0 4 ⎞⎛ ⎛ 4 ⎞ ⎛ 100 ⎞ ⎟ r ~ ⎜ ⎟⎜ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ M B ( F ) = rBC F = ⎜ 0 0 0 ⎟ 0 25 = 25⎜ 0 ⎟ = ⎜ 0 ⎟ N⋅ m ⎟ ⎜ − 4 0 0 ⎟⎜ ⎜ 4 3 ⎟ ⎜173.2 ⎟ 1 ⎟ ⎝ ⎠⎜ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠
⎛ 0 0 b ⎞⎛ − a ⎞ ⎟⎜ ⎟ ⎜ F F ~ M O = rA F = ⎜ 0 0 − a ⎟⎜ − b ⎟ = 2 2 2 2 a + b2 + c 2 ⎜ − b a 0 ⎟⎜ c ⎟ a + b + c ⎠⎝ ⎠ ⎝
(3)
该力矩的大小:
2 2 2 M O = M Ox + M Oy + M Oz = cF
rOB = (3 4 5) T,rOB = 32 + 42 + 52 = 5 2
r rOB r
r F1
B
r F3
r F1
F2
o
r x
题解 2-2C
r y
r
三力的坐标阵分别为: F1 = 5(1 0 0) T
F2 = 10 2 5 2 (3 4 5) T = 2(3 4 5) T
r 合力 FB 的坐标阵为:
(3)
洪嘉振等《理论力学》第 3 版习题详解
2
r z
O
r y
r z
O
r z r y
A
O
A
A
r x
B
r r r F x Fz ° 30 r B C Fx
题解 2-5Cb
r r F Fz 30 ° r C Fx
题解 2-5Cc
B
r Fz
r F
30 °
r y
r x
C Fx
题解 2-5Cd
r
r 由图 2-5Cc, F 对点 A 的矩为
2 2 2 FB = FBx + FBy + FBz = 22.56 kN
合力与三个基矢量的夹角为 α , β , γ :
洪嘉振等《理论力学》第 3 版习题详解
2
α = arccos(
FBy F FBx ) = 60.82o , β = arccos( ) = 69.23o , γ = arccos( Bz ) = 37.07 o 。 FB FB FB
F13 = 25 + 64 F = 89 F r r v v 将力 F2 移动到点 B, F2 与 F13 合成为 FB ,方向如图
4m
题 2-2C
r F3
3m
r y
r z
r F13
r F3
r FB
r F2
2-2C。 由于空间关系复杂,很难确定合力的大小与指向。 (2) 解析法 如图 2-2C 建立参考基。 r v v v r r rOB F1 = 5x , F2 = 10 2 , F3 = 8z rOB 其中矢径 rOB 的坐标阵与模分别为
r z
C
rAC = (− a − b c ) , rAC = a + b + c
T 2 2
2
(1)
O
r rAC
r x
B
该力的坐标阵为:
(− a − b c ) N (2) a + b2 + c2 由式(1)与(2)得该力对点 O 矩的坐标阵为:
F=
T 2
F
r rA
r F
A
r y
题解 2-4C
⎛ bc ⎞ ⎟ ⎜ ⎜ − ac ⎟ ⎜ 0 ⎟ ⎠ ⎝
F3 = 8(0 0 1) T ⎛ 5 ⎞ ⎛ 6 ⎞ ⎛ 0 ⎞ ⎛ 11 ⎞ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ FB = F1 + F2 + F3 = ⎜ 0 ⎟ + ⎜ 8 ⎟ + ⎜ 0 ⎟ = ⎜ 8 ⎟ kN ⎜ 0 ⎟ ⎜10 ⎟ ⎜ 8 ⎟ ⎜18 ⎟ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠
合力的坐标: FBx = 11 kN , FBy = 8 kN , FBz = 18 kN 合力的大小:
r1′ = (2b a ) , r2′ = (b a )
T T
r y
r yb
r r2
r F1
两力对点 A 的矩 r r r r M Az ( F1 ) = M Az′ ( F1 ) = M Az′ ( F1x′ ) + M Az′ ( F1 y′ )
′F1x′ + x1 ′ F1 y′ = − y1 = − aF1 cos(α − β ) + 2bF1 sin(α − β ) r r r r M Az ( F2 ) = M Az′ ( F2 ) = M Az′ ( F2 x′ ) + M Az′ ( F2 y′ ) ′ = − y′ 2 F2 x′ + x2 F2 y′ = aF2 sin β − bF2 cos β
⎛ F BC ⎞ ⎛ 25 ⋅ 4 ⎞ ⎛ 100 ⎞ ⎟ ⎜ r ⎜ z ⎟ ⎜ ⎟ M A ( F ) = ⎜ Fx AB ⎟ = ⎜ 3 ⋅ 25 3 ⎟ = ⎜129.9 ⎟ N⋅ m ⎜ ⎟ ⎜ ⎟ ⎜ Fx BC ⎟ ⎟ ⎜ ⎝ ⎠ ⎝ 25 3 ⋅ 4 ⎠ ⎝173.2 ⎠ r 由图 2-5Cd, F 对点 B 的矩为 ⎛ F BC ⎞ ⎛ 25 ⋅ 4 ⎞ ⎛ 100 ⎞ ⎟ ⎜ r ⎜ z ⎟ ⎜ ⎟ M B ( F ) = ⎜ 0 ⎟ = ⎜ 0 ⎟ = ⎜ 0 ⎟ N⋅ m ⎜ ⎟ ⎜ ⎟ ⎜ Fx BC ⎟ ⎟ ⎜ ⎝ ⎠ ⎝ 25 3 ⋅ 4 ⎠ ⎝173.2 ⎠
F = 50 − cos 30o
r z
O
r y
r rOC
A
(
0 sin 30o
)
T
= 25 − 3 0 1 N
(
)
T
r x
B
r rAC r rBC
r F
30 °
(2) 由式(1)与(2)该力分别对点 O、A、B 的矩分别 为:
− 3⎞ ⎛ 4 ⎞ ⎛ 100 ⎞ ⎛ 0 3 4 ⎞⎛ ⎟ r ~ ⎟ ⎟ ⎜ ⎜ ⎟⎜ ⎜ MO (F ) = rOCF = ⎜ − 3 0 − 2⎟⎜ 0 ⎟25 = 25⎜ 3 3 − 2⎟ = ⎜ 79.9 ⎟ N⋅ m ⎟ ⎜ 4 3 ⎟ ⎜173.2⎟ ⎜ − 4 2 0 ⎟⎜ 1 ⎟ ⎠ ⎠ ⎝ ⎝ ⎠⎜ ⎝ ⎝ ⎠
洪嘉振等《理论力学》第 3 版习题详解
1
2-7C 如图所示,大小均为 F 的 12 个力,作用 于边长为 a 的正方体的棱边上。问: (1) 可以组成几对力偶; (2) 写出各对力偶的矢量表达式及其力偶 矩矢量; (3) 求合力偶矩的大小和方向。
解 2: 由式(2)得该力的三个分量分别为 r r r Fx = 25 3 N, Fy = 0 N, FZ = 25 N r 由图 2-5Cb, F 对点 O 的矩为
⎞ ⎛ ⎛ 25 ⋅ 4 Fz BC ⎞ ⎛ 100 ⎞ ⎟ ⎜ r ⎜ ⎟ ⎟ ⎜ M O ( F ) = ⎜ Fx AB − Fz OA ⎟ = ⎜ 3 ⋅ 25 3 − 25 ⋅ 2 ⎟ = ⎜ 79.9 ⎟ N⋅ m ⎟ ⎜ ⎟ ⎜173.2 ⎟ ⎟ ⎜ ⎜ 25 3 ⋅ 4 Fx BC ⎠ ⎠ ⎝ ⎠ ⎝ ⎝
= − F1 cos α (− 2b sin β + a cos β ) + F1 sin α (2b cos β − a sin β ) = − aF1 cos(α − β ) + 2bF1 sin(α − β )
= − y1 F1x + x1 F1 y
洪嘉振等《理论力学》第 3 版习题详解
2
r r r M Az ( F2 ) = M Az ( F2 x ) + M Az ( F2 y ) = − y2 F2 x + x2 F2 y = − F2 (b cos β − a sin β ) = aF2 sin β − bF2 cos β
T T r1′ = (2b a ) , r2′ = (b a ) r r 矢径 r1 与 r2 在参考基的坐标阵为