MCS-51单片机汇编语言编程实例
3-1 MCS-51单片机汇编语言程序设计举例

二、 乘法运算程序
在计算机中, 常将乘法采用移位和加法来实现。 例8 将(R2R3)和(R6R7)中双字节无符号数相乘, 结果存入 R4R5R6R7。 此乘法可以采用部分积右移的方法来实现, 其程序框图 如图 4.6 所示, 程序如下: NMUL: MOV R4, #0 MOV R5, #0 CLR C MOV R0, #16 ; 初始化
MOV HEX, A
RET
ASCTAB: DB 30H, 31H, 32H, 33H, 34H DB 35H, 36H, 37H, 38H, 39H DB 41H, 42H, 43H, 44H, 45H
DB 46H
在这个程序中, 查表指令MOVC A, @A+PC到表格首地 址有两条指令, 占用 3 个字节地址空间, 故修改指针应加 3。
低位字节相加
MOV 20H, A MOV A, 21H ADDC A,R4 MOV 21H, A POP ACC POP PSW RET
结果送20H单元
高位字节相加
3 运算程序
一、 加、 减法程序
例 7 将40H开始存放的 10 个字节的数与 50H开始存放的
10 个字节的数相减(假设被减数大于减数)。
ADD A, R2 ; 表中一个额定值为2个字节 MOV 31H, A MOV DPTR, #TAB ; 表首址
MOVC A, @A+DPTR; 查表读取第一个字节 XCH A, 31H ; 第一个字节内容存入31H INC DPTR MOVC A, @A+DPTR; 查表读取第二个字节 MOV 32H, A ; 第二字节的内容存入32H TAB: DW 1230H, 1450H, ... DW 2230H, 2440H, ... DW 3120H, 3300H, ...
MCS51单片机指令系统
第一条指令为远查表指令,可以在64K的程序存储器空间寻 址。基地址寄存器为DPTR,其意思为,DPTR里面存放的是 程序存储器中数据表格的首地址,A为数据地址的偏移量。
这条指令执行以后,以 (A)+(DPTR)的数值为地址数 据就送进A里面来了,也就是从表格首地址开始以后的第(A) 个数据被送进A了。(举例子说明)
编写好的程序都放在程序存储器中,由于一个存储地址所 指示的存储单元只能存放一字节的数据。所以,在存放指令时, 必须将指令拆分成一个一个字节进行连续存放。
比如: 实现“累加器加10H”这条指令,其机器语言为 0111010000010000, 占用了两个字节,就必须拆成两个字节 进行连续存储。
但是,用二进制来表示比较麻烦,因此,也常用十六进制来 表示如:74H 10H来表示以上这条机器语言。可见,用十六进 制表示指令比较简单,但是,指令系统有上百条指令,不易记 住。所以,一般采用容易记住的一些缩写符号来表示机器语言,
2. 在指令中直接给出操作数的地址, 这种寻址方式就属
于直接寻址方式。在这种方式中, 指令的操作数部分直接 是操作数的地址。
比如:MOV A,30H;将30H里面的数送到A里面 MOV 21H,30H;将30H里面的数存放到21H里面 在MCS -51 单片机指令系统中, 直接寻址方式中可
以访问 3 种存储器空间: (1) 内部数据存储器的低 128 个字节单元(00H~
7. 位寻址 指按照位进行的寻址操作,(前面讲的都是按字节进
行的寻址操作)。该种寻址方式中, 操作数是内部RAM单元 中20H到2FH的128个位地址以及SFR中的11个可进行 位寻址的寄存器中的位地址寻址。
比如:MOV C,20H;就是将RAM中位寻址区中20H位地 址中的内容送给C。区别与MOV A,20H;这个是将内部 RAM中20H单元的内容送给A。
第三章MCS51单片机的指令系统和汇编语言程序示例(第5范文
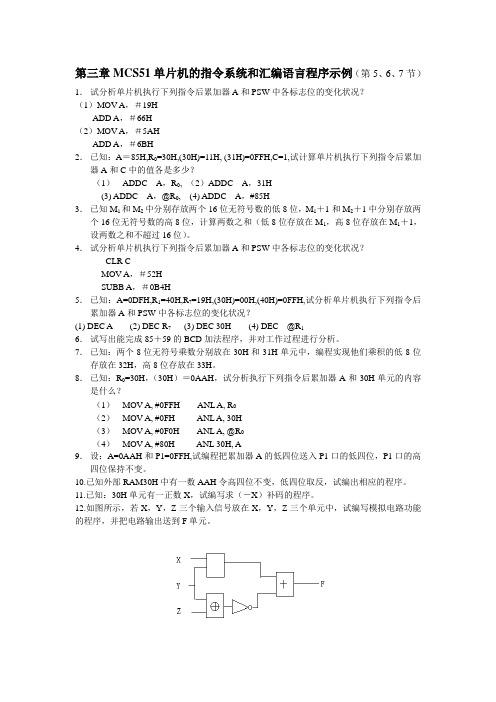
第三章MCS51单片机的指令系统和汇编语言程序示例(第5、6、7节)1.试分析单片机执行下列指令后累加器A和PSW中各标志位的变化状况?(1)MOV A,#19HADD A,#66H(2)MOV A,#5AHADD A,#6BH2.已知:A=85H,R0=30H,(30H)=11H, (31H)=0FFH,C=1,试计算单片机执行下列指令后累加器A和C中的值各是多少?(1)ADDC A,R0, (2)ADDC A,31H(3) ADDC A,@R0, (4) ADDC A,#85H3.已知M1和M2中分别存放两个16位无符号数的低8位,M1+1和M2+1中分别存放两个16位无符号数的高8位,计算两数之和(低8位存放在M1,高8位存放在M1+1,设两数之和不超过16位)。
4.试分析单片机执行下列指令后累加器A和PSW中各标志位的变化状况?CLR CMOV A,#52HSUBB A,#0B4H5.已知:A=0DFH,R1=40H,R7=19H,(30H)=00H,(40H)=0FFH,试分析单片机执行下列指令后累加器A和PSW中各标志位的变化状况?(1) DEC A (2) DEC R7 (3) DEC 30H (4) DEC @R16.试写出能完成85+59的BCD加法程序,并对工作过程进行分析。
7.已知:两个8位无符号乘数分别放在30H和31H单元中,编程实现他们乘积的低8位存放在32H,高8位存放在33H。
8.已知:R0=30H,(30H)=0AAH,试分析执行下列指令后累加器A和30H单元的内容是什么?(1)MOV A, #0FFH ANL A, R0(2)MOV A, #0FH ANL A, 30H(3)MOV A, #0F0H ANL A, @R0(4)MOV A, #80H ANL 30H, A9.设:A=0AAH和P1=0FFH,试编程把累加器A的低四位送入P1口的低四位,P1口的高四位保持不变。
第三章MCS51系列单片机指令系统及汇编语言程序设计
SJMP rel ;PC+ 2 + rel→PC 短转移指令为一页地址范围内的相对转移指令。因为rel为1字节补码 偏移量,且SJMP rel指令为2字节指令,所以转移范围为-126D~+ 129D 【4】间接转移指令
表3.4 程序存储器空间中的32个基本2K地址范围
0000H~07FFH 0800H~0FFFH 1000H~17FFH 1800H~1FFFH 2000H~27FFH 2800H~2FFFH 3000H~37FFH 3800H~3FFFH 4000H~47FFH 4800H~4FFFH 5000H~57FFH
3. 寄存器寻址
以通用寄存器的内容为操作数的寻址方式。通用寄存 器包括:A,B,DPTR,R0~R7。其中,R0~R7必须在 工作寄存器组之中。
例如:INC R0 ;(R0)+1→R0
需要注意的是,A和B既是通用寄存器,又是具有直 接地址的特殊功能寄存器。
4. 寄存器间接寻址
以寄存器中的内容为地址,该地址中的内容为操作数的寻址方式。能够 用于寄存器间接寻址的寄存器有:R0,R1,DPTR,SP。其中,R0,R1必 须在工作寄存器组之中,SP仅用于堆栈操作。
MCS-51单片机共有111条指令,按功能分类, MCS-51指令系统可分为5大类:
➢ 数据传送类指令(共29条) ➢ 算术操作类指令(共24条) ➢ 逻辑操作类指令(共24条) ➢ 控制转移类指令(共17条) ➢ 布尔变量操作类指令(共17条)
1.数据传送类指令(共29条)
以累加器A为目的操作数类指令(4条)
第三章 MCS-51单片机的汇编语言程序设计(8学时)

是循环程序的主体。
(3) 循环控制部分: 这部分的作用是修改循环变量和控制变
量, 并判断循环是否结束, 直到符合结束条件时, 跳出循环为止。
(4) 结束部分: 这部分主要是对循环程序的结果进行分析、 处理和存放。
12 8
12
图 4.4
9
1.已知循环次数的循环程序设计
例 5 工作单元清零。
MOV R2, #50 ; 置循环次数 CLEAR: CLR A CLEAR1: MOVX @DPTR, A MOV DPTR,#8000H INC DPTR ; 修改指针
#50+1 MOV R2,#50
CLR2: DJNZ R2,CLR1 DJNZ R2, CLEAR1; 控制循环 RET RET CLR1: MOVX @DPTR,A INC DPTR
12
图 4.1 分支结构框图 (a) 单分支流程; (b) 多分支流程
4
例 4 比较两个无符号数的大小。
设外部 RAM 的存储单元 ST1和 ST2中存放两个不带符 号的二进制数, 找出其中的大数存入外部 RAM 中的 ST3单 元中。
图 3.3
12
5
程序如下: ORG ST1 ST2 ST3 EQU EQU EQU 1000H 2000H 2100H 2200H ; 清零Cy
12
18
图 4.5
12
19
ORG 0000H
START: MOV DPTR, #BLOCK; 置地址指针
MOV P2, DPH
MOV R7, #LEN DEC R7
; P2作地址指针高字节
; 置外循环计数初值 ; 比较与交换 n-1次
LOOP0: CLR F0 ; 交换标志清 0 MOV R0, DPL; MOV R1, DPL ; 置相邻两数地址指针低字节
51单片机总汇编语言及C语言经典实例
51单片机汇编语言及C语言经典实例实验及课程设计一、闪烁灯如图1 所示为一简单单片机系统原理图:在P1.0 端口上接一个发光二极管L1,使L1 在不停地一亮一灭,一亮一灭的时间间隔为0.2 秒。
延时程序的设计方法,作为单片机的指令的执行的时间是很短,数量大微秒级,因此,我们要求的闪烁时间间隔为0.2 秒,相对于微秒来说,相差太大,所以我们在执行某一指令时,插入延时程序,来达到我们的要求,但这样的延时程序是如何设计呢?下面具体介绍其原理:如图4.1.1 所示的石英晶体为12MHz,因此,1 个机器周期为 1 微秒,机器周期微秒如图 1 所示,当P1.0 端口输出高电平,即P1.0=1 时,根据发光二极管的单向导电性可知,这时发光二极管L1 熄灭;当P1.0 端口输出低电平,即P1.0=0 时,发光二极管L1 亮;我们可以使用SETB P1.0 指令使P1.0端口输出高电平,使用CLR P1.0 指令使P1.0 端口输出低电平。
C 语言源程序#include <AT89X51.H>sbit L1=P1^0;void delay02s(void) //延时0.2 秒子程序{unsigned char i,j,k;for(i=20;i>0;i--)for(j=20;j>0;j--)for(k=248;k>0;k--);}void main(void){while(1){L1=0;delay02s();L1=1;delay02s();}汇编源程序ORG 0START: CLR P1.0LCALL DELAYSETB P1.0LCALL DELAYLJMP START DELAY: MOV R5,#20 ;延时子程序,延时0.2 秒D1: MOV R6,#20D2: MOV R7,#248DJNZ R7,$DJNZ R6,D2DJNZ R5,D1RETEND图2 程序设计流程图图1 单片机原理图二、多路开关状态指示如图 3 所示,AT89S51 单片机的 P1.0-P1.3 接四个发光二极管 L1-L4,P1.4-P1.7 接了四个开关 K1-K4,编程将开关的状态反映到发光二极管上。
MCS-51单片机的汇编语言
绝对地址段选择伪指令
CSEG
[AT
address]
DSEG
[AT
address]
ISEG
[AT
address]
BSEG
[AT
address]
XSEG
[AT
address]
分别为程序存储器、内部数据存储器、间接寻址的内部数据存 储器、位寻址区和外部数据存储器的使用指定绝对地址
1.5 通用的转移和调用语句
MCS-51汇编器允许程序员使用通用的转移和调用助记符JMP 与CALL
用来代替SJMP、AJMP、LJMP和ACALL、LCALL
汇编产生的未必是最优化的结果
1.6 条件汇编
将一个软件的多个版本保存在同一组源程序文件中 使用IF、ELSEIF、ELSE、ENDIF IF或ELSEIF后的表达式通常为关系表达式 当IF或ELSEIF后的数值表达式的值非零时,汇编其后的语句组;
1.4 伪指令语句
ORG伪指令
ORG
பைடு நூலகம்
expression
设置汇编计数器的值,指定其后语句的起始地址
伪指令语句
END伪指令
应当是源程序的最后一条语句 通知汇编程序汇编过程应在此结束 汇编器不理会END后面的文件内容
每个程序文件都应以END结束
伪指令语句
EQU和SET伪指令
symbol
单片机原理与应用
MCS-51单片机的汇编语言
INTS SET
IF ELSE ENDIF
INTS = 1 MAIN_START
MAIN_START
NUM1 DATA NUM2 DATA
DSEG AT
STACK: DS
20H
51单片机汇编语言及C语言经典实例
51单片机汇编语言及C语言经典实例汇编语言是一种用来编写计算机指令的低级语言,它与机器语言十分接近,可以直接控制计算机硬件。
而C语言是一种高级程序设计语言,它具有结构化编程和模块化设计的特点。
本文将介绍51单片机汇编语言和C语言的经典实例,并进行详细解析。
一、LED指示灯的闪烁我们首先来看一个经典的51单片机汇编语言的实例——LED指示灯的闪烁。
我们可以通过控制单片机的IO口来实现LED的闪烁效果。
以下是汇编语言的代码:```assemblyORG 0 ; 程序起始地址MOV P1, #0; 将 P1 置为0,熄灭LEDLJMP $ ; 无限循环```以上代码使用了51单片机的MOV指令和LJMP指令。
MOV指令用来将一个立即数(这里是0)存储到寄存器P1中,控制对应的I/O口输出低电平,从而熄灭LED。
而LJMP指令则是无条件跳转指令,将程序跳转到当前地址处,实现了无限循环的效果。
对应的C语言代码如下:```c#include <reg51.h>void main() {P1 = 0; // 将 P1 置为0,熄灭LEDwhile(1); // 无限循环}```以上代码使用了reg51.h头文件,该头文件提供了对51单片机内部寄存器和外设的访问。
通过将P1赋值为0,控制IO口输出低电平,实现了熄灭LED的效果。
while(1)是一个无限循环,使得程序一直停留在这个循环中。
二、数码管的动态显示接下来我们介绍51单片机汇编语言和C语言实现数码管动态显示的经典实例。
数码管动态显示是通过控制多个IO口的高低电平来控制数码管显示不同的数字。
以下是汇编语言的代码:```assemblyORG 0 ; 程序起始地址MOV A, #0FH ; 设置数码管全亮,A存储数码管控制位MOV P2, A ; 将 A 的值存储到 P2,控制数码管的数码控制位DELAY: ; 延时循环MOV R7, #0FFH ; 设置延时计数值LOOP1: ; 内层循环MOV R6, #0FFH ; 设置延时计数值LOOP2: ; 内部延时循环DJNZ R6, LOOP2 ; 延时计数减1并判断是否为0,不为0则继续循环DJNZ R7, LOOP1 ; 延时计数减1并判断是否为0,不为0则继续循环DJNZ A, DELAY ; A减1并判断是否为0,不为0则继续循环JMP DELAY ; 无限循环,实现动态显示```以上代码中,我们通过MOV指令来将一个立即数(0x0F)存储到寄存器A中,控制数码管显示0-9的数字。
第4章 MCS-51单片机汇编语言程序设计(2)
XCH A,R3 INC A MOVC A,@A+DPTR MOV DPL,A MOV DPH,R3 CLR A JMP @A+DPTR TAB DW DW A0 A1
…………. DW AN
INC
DPTR
MOVX A,@DPTR SUBB A,R7 JNC XCH BIG1 A,R7
BIG0:INC DPTR
实现程序如下: 实现程序如下
START:CLR C : MOV DPTR,#ST1 , MOVX A,@DPTR , MOV R7,A
MOVX @DPTR,A RET BIG1:MOVX A,@DPTR SJMP BIG0
实现程序如下: 实现程序如下 MOV 30H, 20H ANL 30H,#00011111B MOV A,21H SWAP A RL A ANL A,#11100000B ORL 30H,A
第4章 MCS-51单片机汇编语言程序设计
实现程序如下: 实现程序如下 例 A,@R1 ADDC4.3 做3个字节的 无符号的加法. 无符号的加法.设一个加 MOV R0,#52H , MOV @R0,A 数存放在内部RAM 50H、 RAM的 数存放在内部RAM的50H、 MOV R1,#55H , DEC R0 51H、52H单元中 单元中, 51H、52H单元中,另一 DEC R1 RAM的53H、 MOV A,@R0 个加数存放在RAM 个加数存放在RAM的53H、 MOV A,@R0 54H、55H单元中 单元中, 54H、55H单元中,相加 ADD A,@R1 结果存内部RAM的50H、 结果存内部RAM的50H、 RAM ADDC A,@R1 51H、52H单元 单元, 51H、52H单元,均从高 MOV @R0,A 字节开始存放, 字节开始存放,进位存放 MOV 00H,C 在位寻址区的00H位中。 00H位中 在位寻址区的00H位中。 MOV @R0,A DEC DEC R0 R1
MCS51单片机指令系统与汇编语言程序设计
MCS51单片机指令系统与汇编语言程序设计MCS-51是一种非常常见的8位单片机系列,该系列包括了多种型号的单片机,如Intel 8051、8031、8052等。
MCS-51单片机指令系统是一组用于驱动该系列单片机的指令集,汇编语言程序设计是利用这些指令来编写程序。
MCS-51单片机指令系统包含了多种指令,可以执行诸如数据传输、算术逻辑运算、控制和数据访问等功能。
这些指令通过各种不同的寻址模式来操作数据,包括立即寻址、寄存器寻址、直接寻址、间接寻址和寄存器间接寻址等。
不同的寻址模式和指令组合可以实现不同的功能。
汇编语言程序设计通过将人类可读的汇编指令翻译成机器可执行的二进制指令来编写程序。
在MCS-51单片机中,汇编指令由操作码和操作数组成。
操作码指定了所执行的操作,如数据传输、算术运算或控制指令。
操作数则指定了指令要操作的数据。
下面以一个简单的例子来说明MCS-51单片机指令系统和汇编语言程序设计的基本原理。
假设我们要编写一个程序,将两个寄存器中的数据相加,并将结果存储到第三个寄存器中。
首先,我们需要将第一个寄存器的值加载到累加器A中,这可以通过MOV指令实现。
MOV指令的操作码为01,操作数为两个寄存器的地址。
例如,MOVA,R0将R0的值加载到A中。
接下来,我们需要将第二个寄存器的值加载到B寄存器中,同样可以使用MOV指令。
MOVB,R1将R1的值加载到B中。
然后,我们可以使用ADD指令将A和B中的值相加,并将结果存储到A中。
ADD指令的操作码为04,操作数为A的地址。
例如,ADDA将累加器中的值与A寄存器中的值相加,并将结果存储到A中。
最后,我们可以使用MOV指令将A中的结果移动到第三个寄存器中,例如,MOVR2,A将A的值移动到R2中。
通过组合使用这些指令,我们可以实现将两个寄存器中的值相加并存储到第三个寄存器中的功能。
总结来说,MCS-51单片机指令系统和汇编语言程序设计是一种用于编程控制该系列单片机的方式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
LOOP3:
; D2亮
LOOP4:
LOOP5:
; D3亮 ;延时
例3
步进电机
任务1:初始化步进电机
START: ;初始化 MOV DPTR,#30H;表基址 L5: MOV R7, #0H;百位 L9: MOV R6, #0H;十位 L10: MOV R5, #0H;个位 MOV IE,#82H ;全局中断,T0中断允许 ORL IP,#2H ;逻辑或,T0中断优先级高 MOV TMOD,#11H ;定时器方式字,T1和T0都工作在方式1,16位的计 数器GATE等于0,不受外部控制 P4 EQU 0C0H ;声明P4地址 MOV P4,#0FFH P4SW EQU 0BBH ;声明P4SW寄存器的地址 MOV P4SW,#70H SETB p1.1 SETB P1.4 ;CE2置高 SETB P1.3 ;CE1置高
例3
任务:主程序
步进电机
MOV A,R0 RLC A ;带进位的循环左移操作 MOV P3.2,C ;IN1 RLC A MOV P1.0,C ;IN2 MOV R0,A LCALL LED LCALL TIME MOV A,R0 RLC A MOV P3.2,C RLC A MOV P1.0,C MOV R0,A LCALL LED LCALL TIME
程序3
ORG LOOP: LOOP0: MOV MOV MOV RR CALL DJNZ SJMP 0000H A, #0FBH R0, #3 P1 , A A DT R0, LOOP0 LOOP
7行
程序4
LOOP0: LOOP1: LOOP2: ORG 0000H MOV R7 , #0 ORL P1 , #07H CJNE R7 , #0 , LOOP3 INC R7 ANL P1 , #0FBH SJMP LOOP5 CJNE R7 , #1 , LOOP4 INC R7 ANL P1 , #0FDH SJMP LOOP5 CJNE R7 , #02 , LOOP0 MOV R7 , #0 ANL P1 , #0FEH CALL DT SJMP LOOP1 ;全熄灭 ; D1亮
0000H 90H R1 , #100 R0 , #100 R0 , LOOP1 R1 , LOOP1 LOOP
例2 跑马灯
任务:D1,D2,D3循环亮灭, D1 →D2→D3 ↑ ↓ 一个时间只有一个亮, 每个1秒转换一次。
VCC
VCC
VCC
1
1
D1
D2
D3
2
2
R1
R2
R3 1 2 3 P1.0 P1.1 P1.2 89C51
例3
步进电机
任务4:开关设置
NEXT: JB P3.7,OPP ;如果P3.7等于1则转移(开关S2按下) MOV R0,#00101101B;按下,顺时针 LJMP S1 OPP: MOV R0,#01111000B;松开,逆时针 S1: JB P3.6,SPD MOV R2,#0H ;未按下,快速 LJMP L1 SPD: MOV R2,#1H ;按下,慢速
2
1
程序1: LOOP0: ORG 0000H ORL P1 , #07H ANL P1 , #0FBH CALL DT ORL ANL CALL P1 , #07H P1 , #0FDH DT ; 全熄灭 ; D1亮 ;延时 ;全熄灭 ; D2亮 ;延时 ;全熄灭 ; D3亮 ;延时
ORL P1 , #07H ANL P1 , #0FEH CALL DT SJMP LOOP0
L1:
例3
任务:主程序
步进电机
MOV A,R0 RLC A MOV P3.2,C RLC A MOV P1.0,C MOV R0,A LCALL LED LCALL TIME MOV A,R0 RLC A MOV P3.2,C RLC A MOV P1.0,C MOV R0,A LCALL LED LCALL TIME LJMP NEXT
例3
步进电机
任务3:定时器中断实现延时程序
TIM3: CJNE R1,#1H,TIM3 DJNZ R3,TIM4 MOV TH0,#2FH MOV TL0,#70H SETB TR0 MOV R1,#0H TIM5: CJNE R1,#1H,TIM5 TIM2: RET T0IN:;中断程序 MOV R1,#1H RETI;中断返回
(256*256+256+1)R2+(256+1)R1+R0-(256*256+2*256-2)=1000000 65793R2+257R1+R0=1066046 R2=15, R1=50, R0=255
程序2
ORG LOOP: MOV MOV RR CALL MOV RR CALL MOV CALL SJMP 0000H A, #0FBH P1 , A A DT P1 , A A DT P1 , A DT LOOP
例3
步进电机
任务2:定时器中断实现演示程序
TIME: CJNE R2,#0,TIM0 ;R2不等于0则是慢速,跳转 ;;;;;;;快速,60转/分 MOV TH0,#5BH MOV TL0,#0F0H SETB TR0 MOV R1,#0H TIM1: CJNE R1,#1H,TIM1 SJMP TIM2 ;;;;;;;;慢速,10转/分 TIM0: MOV R3,#2H TIM4: MOV TH0,#0H MOV TL0,#0H SETB TR0 MOV R1,#0H
例1
方波产生
任务:从P1.0引脚输出一个方波
VCC
D0
R1 1 P1.0 89C51
2
1
程序1:
LOOP:
ORG CPL SJMP
0000H 90H LOOP
机器码 0000 0001 0002 0003 0004
B2 90 80 FC --
程序2:加软延时 ORG LOOP: CPL MOV MOV LOOP1: DJNZ DJNZ SJMP
DT:
DT1:
MOV MOV MOV DJNZ DJNZ DJNZ RET
R2 , #0FH R1 , #32H R0 , #0FFH R0 , DT1 R1 , DT1 R2 , DT1
;#15 ;#;#255
T= (2 * ( 256*256*(R2-1) + 256*(R1-1) + R0 +256*(R2-1) + R1 +R2) +3+1) * (12/fosc)