基于单片机的全智能小车(遥控_避障_循迹_液晶)
基于51单片机设计智能避障小车

单片机设计智能避障小车摘要利用红外对管检测黑线与障碍物,并以STC89C51单片机为控制芯片控制电动小汽车的速度及转向,从而实现自动循迹避障的功能。
其中小车驱动由L298N 驱动电路完成,速度由单片机输出的PWM波控制。
本文首先介绍了智能车的发展前景,接着介绍了该课题设计构想,各模块电路的选择及其电路工作原理,最后对该课题的设计过程进行了总结与展望并附带各个模块的电路原理图,和本设计实物图,及完整的C语言程序。
关键词:智能小车;51单片机;L298N;红外避障;寻迹行驶abstractUsing infrared detection black and obstacles to the line and STC89C51 microcontroller as the control chip to control the speed of the electric car and steering, so as to realize the function of automatic tracking and obstacle avoidance. Which the car driven by the L298N driver circuit is completed, the speed of the microcontroller output PWM wave control. This article first introduces the development of the intelligent car prospect, then introduces the design idea, the subject selection of each module circuit and working principle of the circuit, the design process of the subject is summarized and prospect with each module circuit principle diagram, and the real figure design, and complete C language program.Key words: smart car; 51 MCU; L298N; infrared obstacle avoidance; track driving一、绪论1.1智能小车的意义和作用自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、冶金、交通、宇航、国防等领域。
基于单片机设计智能避障小车

基于单片机设计智能避障小车IMB standardization office【IMB 5AB- IMBK 08- IMB 2C】单片机设计智能避障小车摘要利用红外对管检测黑线与障碍物,并以STC89C51单片机为控制芯片控制电动小汽车的速度及转向,从而实现自动循迹避障的功能。
其中小车驱动由L298N驱动电路完成,速度由单片机输出的PWM波控制。
本文首先介绍了智能车的发展前景,接着介绍了该课题设计构想,各模块电路的选择及其电路工作原理,最后对该课题的设计过程进行了总结与展望并附带各个模块的电路原理图,和本设计实物图,及完整的C语言程序。
关键词:智能小车;51单片机;L298N;红外避障;寻迹行驶abstractUsinginfrareddetectionblackandobstaclestothelineandSTC89C51microcontroller asthecontrolchiptocontrolthespeedoftheelectriccarandsteering,,,thenintroducest hedesignidea,thesubjectselectionofeachmodulecircuitandworkingprincipleofthecir cuit,thedesignprocessofthesubjectissummarizedandprospectwitheachmodulecircuitp rinciplediagram,andtherealfiguredesign,andcompleteClanguageprogram. Keywords:smartcar;51MCU;L298N;infraredobstacleavoidance;trackdriving一、绪论智能小车的意义和作用自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、冶金、交通、宇航、国防等领域。
基于单片机的智能小车避障循迹系统设计_顾群

23随着科技的发展,关于人工智能的研究也越来越受人关注。
智能小车在各个领域都有广泛的应用前景,它可以代替人类完成恶劣环境下的货物搬运、设备检测等任务。
对智能小车而言,正确地行走在人们所设定的路线并避开障碍物是非常重要的,因此对于智能小车循迹避障系统的设计与研究显得尤为重要。
1、系统总体构成本设计以STC89C52单片机作为主控芯片,通过超声波测距来获取小车距离障碍物的距离,由LCD显示模块实时反馈路况和行驶信息,主控系统根据反馈信息判断并调整小车的行驶方向和速度,在避开障碍物后,小车会沿直线前进。
本文设计的智能小车主要由下面几个模块组成:主控制模块、避障、循迹感测模块、前进、转弯控制电机以及液晶显示模块。
系统总体构成图如下所示图1 系统构成框图2、系统硬件组成与实现设计2.1 系统主控制模块本设计采用8位微控制器STC89C52单片机作为主控制模块,在选定智能车系统采用超声波-光电接近开关避障方案后,路径信号经STC89C52的I/O口输入处理后,用于小车的运动控制决策,由P0口输出电机控制信号。
2.2 系统驱动模块智能小车的运动要靠电机带动来完成,单片机根据路况信息发出控制指令,通过电机的正转反转来达到控制其运动方向的目的。
电机驱动一般采用H桥式驱动电路,本系统采用的L298N内部集成了H桥式驱动电路。
通过单片机给予L298N电路PWM信号来控制小车的速度,起停。
2.3 避障与循迹模块避障作为智能小车运动控制的核心内容,是整个系统的最关键模块之一,避障方案的好坏,直接关系到系统最终性能的优劣。
本设计采用HC-SR04超声波模块实现避障,该模块可提供2cm-400cm的非接触式距离感测功能,测距精度可达高到3mm,在满足系统的要求下具有较高的精度和较强的抗干扰性能。
能很好判断是否是地面突起或不可穿越的障碍,模块包括超声波发射器、接收器与控制电路。
小车循迹是使用的红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质的特点。
基于STM32单片机的智能寻迹避障小车
图6
寻迹模块
寻迹模块TCRT5000如图7所示,该传感器工作原理与避障模块原理相似,该元件在最常用的功能就是检测黑白线。当该元件检测到黑线时输出高电平,当元件没有检测到黑白线时输出低电平。该元件检测距离最远可达5厘米,因此检测距离十分有限,但是安装在小车底盘检测黑白线还是十分灵敏。因此我们可将该传感器的输出连接到单片机的IO口,通过程序控制单片机读取IO口的高低电平间接判断前方是否存在黑线,从而发出相关的命令。该传感器与单片机的连接如图8所示。
在探索一些人类未知的领域的时候,比如说火星,人类很难亲身进入到这些地方,有了智能避障小车,小车能够自发的躲避障碍帮助人类收集资源和信息
对于一些行动不便的人们,智能小车也将是他们很好的代步工具。
研究意义
总体概述
原理图
驱动模块
避障模块
寻迹模块
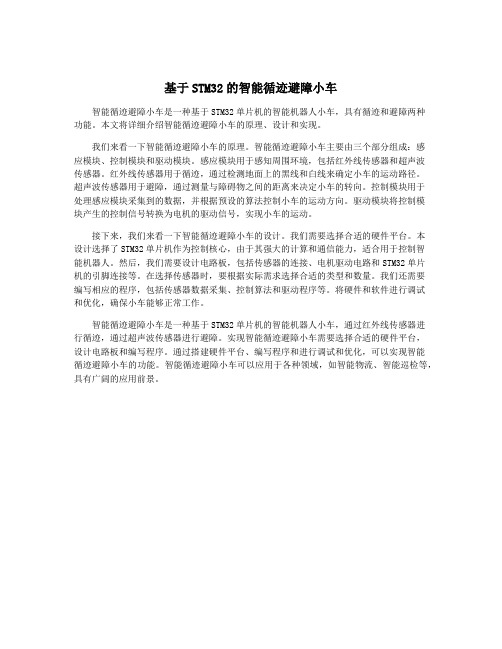
基于基于STM32单片机的智能寻迹避障小车主要由主控模块STM32单片机、电机驱动模块L298N、寻迹模块TCRT50000红外传感器和避障模块 E18-D80NK-N光电传感器组成。系统框图如下所示:
恳请各位老师批评指正!
总体概述
STM32单片机
寻迹模块
避障模块
电机驱动模块
电源
图1
硬件原理图
图2
L298N驱动模块如图3所示,该模块一共有两个使能端ENA、ENB以及IN1-IN4四个输入端。该模块可以同时控制两个直流电机,其中ENA、IN1和IN2控制一个电机,ENB、IN3和IN4控制另一个电机。当我们给使能端送入使能信号,就可以通过输入端的高低电平信号控制直流电机的运行状态,例如正转、反转以及停转。我将单片机的六个IO口接到驱动模块,通过程序控制单片机产生高低电平信号作为驱动模块的输入,从而控制电机的运行状态,驱动模块与单片机的连接如图4所示。
智能小车(单片机格式)循迹 遥控 避障
西安科技大学自动寻迹及避障小车学院:电气与控制工程学院专业:测控技术与仪器学生:潘富强袁鑫朱明指导老师:侯媛彬陈毅静王建1西安科技大学摘要单片机应用技术飞速发展,从导弹的导航装置,到飞机上各种仪表的控制,从计算机的网络通讯与数据传输,到工业自动化过程的实时控制和数据处理,以及生活中广泛使用的各种智能IC卡、电子宠物等,这些都离不开单片机。
单片机是集CPU,RAM,ROM ,定时,计数和多种接口于一体的微控制器。
它体积小,成本低,功能强,广泛应用于智能产业和工业自动化上。
本文是基于单片机的智能小车设计,通过红外遥控、躲避障碍物功能,寻迹功能和测速功能来诠释智能小车的冰山一角,向大家展示智能小车的强大功能。
关键词:单片机,智能小车,红外遥控,躲避障碍物,寻迹,测速。
AbstractSCM application technology is developing rapidly from the missile's navigation devices, to the aircraft instrument control, computer network communications and data transmission, industrial automation process real-time control and data processing, as well as the widely used in a variety of intelligent life IC card, electronic pets, which are inseparable from the microcontroller. SCM is a set of the CPU, RAM, ROM, timing, counting and a variety of interfaces in one of the microcontroller. Its small size, low cost, functional, widely used in smart industries and industrial automation.Microcontroller-based intelligent car design, infrared remote control, to avoid obstacles feature, look for the trace function and speed function to interpret the tip of the iceberg of the smart car, to show a strong function of the smart car.Keywords:microcontroller, smart car, infrared remote control to avoid obstacles, tracing velocimetry.2西安科技大学目录第1章绪论 (4)1.1 智能小车成果 (4)1.2 智能小车发展 (4)1.3 本次智能小车设计 (4)第2章智能小车设计及器件介绍 (6)2.1 设计思路 (6)2.2 器件介绍 (7)2.2.1 主芯片STC89C52 (7)2.2.2 马达控制驱动芯片L9110 (8)2.2.3 MAX232 (9)2.2.4 OPTC光断续器 (9)2.2.5 液晶显示LM016L (9)第3章单元模块设计 (11)3.1 红外遥控及避障模块设计 (11)3.1.1 功能 (11)3.1.2 电路结构 (11)3.1.3 程序流程图 (11)3.1.4 实现效果 (13)3.2 寻迹模块设计 (13)3.2.1 功能 (13)3.2.2 电路结构 (13)3.2.3 程序流程图 (14)3.2.4 实现效果 (14)3.3 测速模块设计 (15)3.3.1 功能 (15)3.3.2 电路设计 (15)3.3.3 程序流程图 (16)3.3.4 实现功能 (16)小车附加功能 (17)设计总结 (18)参考文献 (19)附录一红外遥控及避障编程 (20)附录二寻迹编程 (28)附录三测速编程 (31)附录四元件清单 (39)附录五实物图 (40)3西安科技大学第1章绪论1.1 智能小车成果系统运用多重传感器与控制器良好的结合,系统可分为传感器检测部分,智能控制部分和电源模块。
基于STM32的智能循迹避障小车
基于STM32的智能循迹避障小车智能循迹避障小车是一种基于STM32单片机的智能机器人小车,具有循迹和避障两种功能。
本文将详细介绍智能循迹避障小车的原理、设计和实现。
我们来看一下智能循迹避障小车的原理。
智能循迹避障小车主要由三个部分组成:感应模块、控制模块和驱动模块。
感应模块用于感知周围环境,包括红外线传感器和超声波传感器。
红外线传感器用于循迹,通过检测地面上的黑线和白线来确定小车的运动路径。
超声波传感器用于避障,通过测量与障碍物之间的距离来决定小车的转向。
控制模块用于处理感应模块采集到的数据,并根据预设的算法控制小车的运动方向。
驱动模块将控制模块产生的控制信号转换为电机的驱动信号,实现小车的运动。
接下来,我们来看一下智能循迹避障小车的设计。
我们需要选择合适的硬件平台。
本设计选择了STM32单片机作为控制核心,由于其强大的计算和通信能力,适合用于控制智能机器人。
然后,我们需要设计电路板,包括传感器的连接、电机驱动电路和STM32单片机的引脚连接等。
在选择传感器时,要根据实际需求选择合适的类型和数量。
我们还需要编写相应的程序,包括传感器数据采集、控制算法和驱动程序等。
将硬件和软件进行调试和优化,确保小车能够正常工作。
智能循迹避障小车是一种基于STM32单片机的智能机器人小车,通过红外线传感器进行循迹,通过超声波传感器进行避障。
实现智能循迹避障小车需要选择合适的硬件平台,设计电路板和编写程序。
通过搭建硬件平台、编写程序和进行调试和优化,可以实现智能循迹避障小车的功能。
智能循迹避障小车可以应用于各种领域,如智能物流、智能巡检等,具有广阔的应用前景。
基于单片机的自动寻迹避障小车设计

三、软件设计
电机控制函数根据预设算法输出控制信号,控制电机的动作。最后,我们在 主程序中调用这些函数,实现小车的自动循迹避障寻光功能。
四、测试与结论
四、测试与结论
为了验证系统的可行性和稳定性,我们对智能小车进行了多次测试。测试结 果显示,该系统能够准确地检测黑色引导线、前方障碍物和光源,并能够根据预 设算法自动调整小车的行驶方向和速度,实现了自动循迹避障寻光功能。因此, 基于单片机技术的自动循迹避障寻光智能小车系统具有广泛的应用前景和市场潜 力。
三、实验与测试
三、实验与测试
1、实验环境:在实验室内模拟实际环境进行测试,包括各种路面情况(如平 滑路面、颠簸路面)、各种障碍物类型等。
三、实验与测试
2、测试指标:测试指标包括小车的平均速度、稳定性、准确性等。通过这些 指标可以评估小车的性能并对其进行优化。
三、实验与测试
3、实验结果分析:根据实验结果分析小车的性能表现,针对不足之处进行改 进和优化。
5、执行器
5、执行器
执行器包括舵机和摄像头。舵机用于调节小车的行驶方向,摄像头用于拍摄 和传输图像数据。
三、软件设计
三、软件设计
软件设计是实现小车自动循迹避障寻光功能的关键。我们使用C语言编写程序, 通过调用单片机的外设接口接收传感器数据,根据预设算法处理数据并输出控制 信号,控制电机驱动模块和执行器的动作。
3、传感器:传感器部分包括寻迹传感器和避障传感器。寻迹传感器用于检测 小车行驶路径,避障传感器则用于检测前方障碍物。常见的传感器类型有红外线 传感器和超声波传感器。
一、硬件设计
4、电机:电机部分包括两个电机和相应的驱动器。电机驱动器用于接收控制 器的指令,控制电机的转动方向和速度。
基于单片机的智能循迹小车设计
基于单片机的智能循迹小车设计智能循迹小车是一种基于单片机控制的小型车辆,通过传感器检测路面信息,结合预设路线实时调整行驶方向,实现自动循迹行驶。
智能循迹小车在无人驾驶、智能物流、探险救援等领域具有广泛的应用前景。
智能循迹小车的硬件主要包括单片机、传感器、电机和电源。
其中,单片机作为整个系统的控制中心,负责接收传感器信号、处理数据并输出控制指令;传感器用于检测路面信息,一般选用红外线传感器或激光雷达;电机选用直流电机或步进电机,为小车提供动力;电源为整个系统提供电能。
智能循迹小车的软件设计主要实现传感器数据采集、数据处理、控制指令输出等功能。
具体来说,软件通过定时器控制单片机不断采集路面信息,结合预设路线信息进行数据分析和处理,并根据分析结果输出控制指令,实现小车的自动循迹。
为提高智能循迹小车的稳定性和精度,需要对算法进行优化。
常用的算法包括PID控制、模糊控制等。
通过对算法的优化,可以实现对路面信息的精确检测,提高小车的循迹精度和稳定性。
为验证智能循迹小车的实际效果,需要进行相关测试。
可以在平坦的路面上进行空载测试,检验小车的稳定性和循迹精度;可以通过加载重量、改变路面条件等方式进行负载测试,以检验小车在不同条件下的性能表现;可以结合实际应用场景进行综合测试,以验证智能循迹小车在实际应用中的效果。
测试环境的选择要具有代表性,能够覆盖实际应用中可能遇到的各种情况。
测试过程中要保持稳定的行驶速度,以获得准确的测试数据。
对于测试过程中出现的问题,要及时记录并分析原因,以便对系统进行改进。
测试完成后,要对测试数据进行整理和分析,评估系统的性能表现,提出改进意见。
通过以上测试,我们发现基于单片机的智能循迹小车在循迹精度、稳定性等方面表现良好,能够满足实际应用中的需求。
同时,通过对算法的优化和硬件的改进,可以进一步提高小车的性能表现。
本文介绍了基于单片机的智能循迹小车的设计和实现过程。
通过合理选择硬件和优化软件算法,实现了小车的自动循迹功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于P89V51RB2单片机智能寻迹小车
目录
第1章绪论 (1)
1.1 引言 (1)
1.2 课题的来源及现状 (1)
1.2.1 课题的来源 (1)
1.2.2 智能汽车国外发展情况 (1)
1.2.3 智能汽车国内发展情况 (1)
1.3 本论文研究的内容 (2)
第2章系统总体设计 (3)
2.1 小车的总体构造....................................................................... 错误!未定义书签。
2.2 智能小车寻迹基本原理 (3)
2.3 智能小车测速基本原理 (3)
2.4 智能小车舵机控制原理 (3)
2.4.1 舵机构造 (3)
2.4.2 舵机工作原理 (3)
2.4.3 舵机控制时序 (3)
2.5 智能小车壁障基本原理 (3)
2.5.1 超声波测距模快介绍 (3)
2.5.2 超声波引脚功能...................................................................................... (3)
2.5.3 超声波工作原理 (3)
2.5.4 超声测距时序....................................... (3)
2.6 智能小车遥控基本原理 (3)
2.7 智能小车液晶显示原理 (3)
第3章系统硬件设计 (10)
3.1 控制器的选择 (10)
3.1.1 概述 (10)
3.1.2 P89V51RB2开发工具特性 (10)
3.2 硬件电路设计 (10)
3.2.1 系统电源电路 (10)
3.2.2 电机驱动模块 (11)
3.2.3 光电编码器 (12)
3.2.4 红外线检测电路 (13)
3.2.5 键盘显示设计 (14)
3.2.6 避障模块设计 (10)
3.2.7 液晶显示设计 (10)
第4章系统软件设计 (17)
4.1 编译环境 (17)
4.2 模块的驱动 (17)
4.2.1 红外线传感器模块 (17)
4.2.2 电机模块的驱动 (18)
4.2.3 转速捕获 (21)
4.2.4 键盘显示模块 (22)
4.2.5 按键模块 (23)
4.2.6 遥控模块 (23)
4.2.7 壁障模块 (23)
4.2.8 液晶模块 (23)
第5章系统调试分析 (25)
5.1 系统设计中的注意事项 (30)
5.1.1 外部因素 (30)
5.1.2 内部因素 (30)
5.2 硬软件总体调试 (31)
第6章结束语 (32)
附录 (24)
第1章绪论
1.1 引言
我们所处的这个时代是信息革命的时代,各种新技术、新思想层出不穷,纵观世界范围内智能汽车技术的发展,每一次新的进步无不是受新技术新思想的推动。
随着汽车工业的迅速发展,传统的汽车的发展逐渐趋于饱和。
伴随着电子技术和嵌入式技术的迅猛发展,这使得汽车日渐走向智能化。
智能汽车由原先的驾驶更加简单更加安全更加舒适,逐渐的向智能驾驶系统方向发展。
智能驾驶系统相当于智能机器人,能代替人驾驶汽车。
它主要是通过安装在前后保险杠及两侧的红外线摄像机,对汽车前后左右一定区域进行不停地扫描和监视。
计算机、电子地图和光化学传感器等对红外线摄像机传来的信号进行分析计算,并根据道路交通信息管理系统传来的交通信息,代替人的大脑发出指令,指挥执行系统操作汽车。
1.2 课题的来源及现状
1.2.1 课题的来源
汽车的智能化是21世纪汽车产业的核心竞争力之一。
汽车的智能化是以迅猛发展的汽车电子为背景,涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科交叉的科技。
1.2.2 智能汽车国外发展情况
从20世纪70年代开始,美国、英国、德国等发达国家开始进行无人驾驶汽车的研究,目前在可行性和实用化方面都取得了突破性的进展。
在无人驾驶技术研究方面位于世界前列的德国汉堡Ibeo公司研制的无人驾驶汽车,2007年4月11日在英国伦敦科学博物馆与公众见面。
这辆无人驾驶智能汽车经德国大众汽车公司生产的帕萨特2.0改装而成,外表看来与普通家庭汽车并无差别,但却可以在错综复杂的城市公路系统中无人驾驶。
1.2.3 智能汽车国内发展情况
目前日本、欧美已有企业取得实用化成果。
与国外相比,国内在智能车辆方面的研究起步较晚,规模较小,开展这方面研究工作的单位主要是一些大学和研
究所,如国防科技大学、清华大学、吉林大学、北京理工大学、长安大学、沈阳自动化所等。
我国从20世纪80年代开始进行无人驾驶汽车的研究,国防科技大学在1992年成功研制出我国第一辆真正意义上的无人驾驶汽车。
先后研制出四代无人驾驶汽车。
第四代全自主无人驾驶汽车于2000年6月在长沙市绕城高速公路上进行了全自主无人驾驶试验,试验最高时速达到75.6Km/h。
在2004年10月12日的第六届高交会上,红旗无人驾驶汽车就引起了极大的轰动。
它在高速公路上最高稳定无人驾驶速度为130公里/小时;峰值无人驾驶速度为170公里/小时。
并同时具备安全超车和系统小型化两个主要指标。
为如此,他们把它称为“中国汽车界的神舟五号”。
2005年,首辆城市无人驾驶汽车在上海交通大学研制成功,该车有望于两年之内率先在上海世纪公园进行示范运营,并在2010年世博会上一展身手。
到时游客只需在公园的入口处按下一个按钮,一辆没有司机的四座敞篷汽车就会从远处开过来缓缓停下,然后搭载着乘客前往他们想去的景点。
1.3 本论文研究的内容
本论文是基于P89V51RB2单片机开发,主要是研究3轮小车的路径识别及其控制算法以及遥控运动。
第2章系统总体设计
2.0 小车的总体构造
图2.0小车总体构造
2.1 智能小车寻迹基本原理
探测路面黑线的基本原理:光线照射到路面并反射,由于黑线和白纸对光的反射系数不同,可以根据接收到的反射光强弱来判断是否是黑线。
利用这个原理,可以控制小车行走的路迹。
这里的循迹是指小车在白色地板上循黑线行走,通常采取的方法是红外探测法。
红外探测法,即利用红外线在不同颜色的物体表面具有不同的反射性质的特点,在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色纸质地板时发生漫反射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,小车上的接收管接收不到红外光。
处理器就根据是否收到反射回来的红外光为依据来确定黑线的位置和小车的行走路线。
红外探测器探测距离有限,一般最大不应超过3cm。
智能小车系统以处理器为核心,为了使智能小车能够快速行驶,处理器必。