最优控制第六章习题答案
最优控制胡寿松版部分习题答案

2-5 求通过(0)1x =,(1)2x =,使下列性能泛函为极值的极值曲线*()x t :2(1)ft t J x dt =+⎰解:由题可知,始端和终端均固定被积函数21L x =+,0L x ∂=∂,2L x x ∂=∂, 2d L x dt x∂⋅=∂ 代入欧拉方程0L d L x dt x∂∂-⋅=∂∂,可得20x =,即0x = 故1x c = 其通解为:12x c t c =+代入边界条件(0)1x =,(1)2x =,求出11c =,21c = 极值曲线为*()1x t t =+2-6 已知状态的初值和终值为(1)4x =,()4f x t =式中f t 自由且f t >1,试求使下列性能泛函达到极小值的极值轨线*()x t :211[2()()]2ft J x t x t dt =+⎰ 解:由题可知,2122L x x =+,()4f t ψ=,()14x =,()4f x t = 欧拉方程:L 0d L x dt x∂∂-=∂∂ 横截条件:()00t x =x ,()()f f x t t ψ=,()0fTt L L x x ψ∂⎛⎫+-= ⎪∂⎝⎭易得到2dxdt= 故12x t c =+ 其通解为:()212x t t c t c =++根据横截条件可得:()()()122121114424f f f f f x c c x t t c t c x t t c ⎧=++=⎪⎪=++=⎨⎪=+=⎪⎩解以上方程组得:12569f t c c =⎧⎪=-⎨⎪=⎩将f t ,1c ,2c 代入J 可得5*201500502150233J x x dt =+=-=⎰ 极值轨线为()*269x t t t =-+2-7 设性能泛函为120(1)J x dt =+⎰求在边界条件(0)0x =,(1)x 自由情况下,使性能泛函取极值的极值轨线*()x t 。
解:由题可知,21L x =+,()00x =,()1x 自由欧拉方程:L 0d L x dt x∂∂-=∂∂ 横截条件:()00t x =x ,L 0ft x∂=∂,0fTt L L x x ∂⎛⎫+= ⎪∂⎝⎭易得到()x t a =其通解为:()x t at b =+代入边界条件()f x t a =,()00x =,1f t =,求出0a =,0b = 将f t ,a ,b 代入J 可得()1*211J x dt =+=⎰极值轨线为()*0x t = 2-9 求使泛函22211220(2)J x x x x dt π=++⎰为极值并满足边界条件1(0)0x =,2(0)0x =1()12x π=,2()12x π=- 的极值轨线*1()x t 和*2()x t 。
最优控制6-1
(6-6) (6-7)
其工作特点是:最大限度地提高该阶段的收益,不考 虑回收问题。
17
若阶段数N=2,则第二阶段的工作方式与N=1时相同,即 不需考虑回收。 为使两个阶段的总收益最大,对第二阶段来说,不论在 第一阶段资源如何分配,即 y0 如何选取,要求其回收 量 ay0 b(x0 y0 ) 在第二阶段发挥最大效用 也就是说,第二阶段的最大收益应是:
解 由(6-3)式可以看出,这是一个求N元函数极值点的问 题。
1)若整体最大值位于(6-4)式限定的区域内部,即所有 yi 满足不等式 0 yi xi ,且g和h存在导数,则所有可通 过解下列方程组求出:
g( yN1) g( yN1) h(xN1 yN1)
13
希望通过合理选择使N个阶段的总收益最大,即:
max RN (x0 , y0 , y1,, yN1)
( y0 , y1,, yN 1 )
max g( y0 ) h(x0 y0 ) g( y1) ( y0 , y1,, yN 1 ) h(x1 y1) g( yN1) h(xN1 yN1)
6-1 所示。
5
站与站各地间凡有连线者,表示相应两地可铺设管 道,线间数字表示两地距离;凡无连线者,表示相应两 地不能铺设管道。现需选择一条由A0 到A6 的铺管线路, 使其总距离最短。
6
解 这一问题可用两种方法求解。 第一种:穷举法 即列出所有可能的组合方案,计算每 一方案的起迄距离,从中选出其总距离最短者,即得最 短铺管线路。
(6-1)
现设以y0与x0-y0投入生产A与B后,可以部分回收,其回 收率分别是 0 a 1 与 0 b 1 ,则经第一阶段生产 后回收的资源总共是:
第六章 最优控制2012
,使J 为极小。
一、性能指标及分类 性能指标函数(又称目标函数、性能泛函),最优控制
问题可归结为求性能指标的极值问题。按照实际控制性能 常见:
⑴ 最短时间问题:
拦截导弹最短时间控制
⑵ 最小消耗问题:控制量u(t)与燃料消耗量成正比
导弹最小燃料控制
(3) 线性调节器问题:考虑在平衡位置 x=0附近的状态调节
导弹稳定控制
在变分法中这类问题称为拉格朗日问题。它要求状态向 量及控制向量在整个动态过程中都满足性能要求。
⑵ 终值型性能指标:
卫星的指向控制
在变分法中称为迈耶尔问题。只要求状态在过程终端时 满足一定要求,而对状态及控制量在整个动态过程中的演变 不作要求。
⑶ 复合型性能指标:
卫星的指向和 稳定控制
的变分是指两个函数间的差
问题:何为两个函数的差?两个函数距离接近?
K阶近似度
定义:设 是线性赋范空间 上的连续泛函,其增量可表示为
其中,
是关于 的线性连续泛函,
是关于 的高
阶无穷小。则
称为泛函 的变分。
泛函的变分等于
3、泛函变分的规则 1) 2) 3) 4)
变分的导数等于导数的变分
4、泛函的极值
寻求在
上的最优控制
或
,以将系统状
态从
转移到 x(t f ) 或 x(t f ) 的一个集合,并使性能指标
最优。其中
是 x 、u 和t 的连续函数
最优控制问题就是求解一类带有约束条件的条件泛函极值问 题。
泛函与变分法
一、泛函与变分
1、泛函的基本定义: 对于某个函数集合 中的每一个函数 ,变量J 都有一个
在变分法中称为波尔札问题。它要求状态在过程终端 时满足一定要求,而且状态向量及控制向量在整个动态过 程中都应满足一定要求。
(完整word版)最优控制第六章习题答案
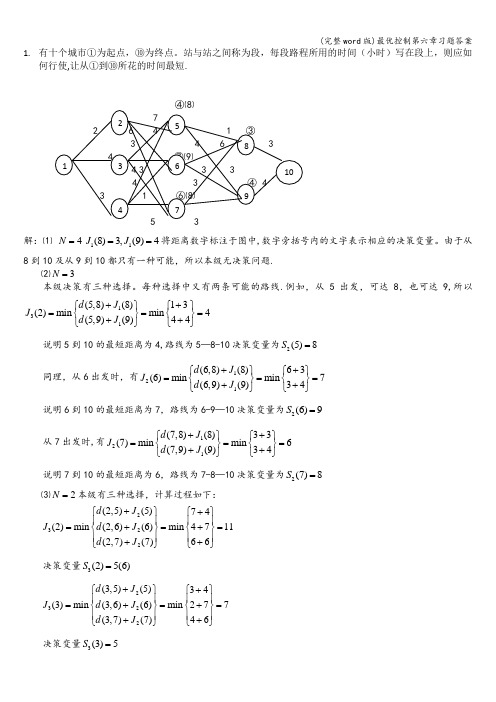
1. 有十个城市①为起点,⑩为终点。
站与站之间称为段,每段路程所用的时间(小时)写在段上,则应如何行使,让从①到⑩所花的时间最短.解:⑴ 4N =11(8)3,(9)4J J ==将距离数字标注于图中,数字旁括号内的文字表示相应的决策变量。
由于从8到10及从9到10都只有一种可能,所以本级无决策问题.⑵3N =本级决策有三种选择。
每种选择中又有两条可能的路线.例如,从5出发,可达8,也可达9,所以131(5,8)(8)13(2)min min 4(5,9)(9)44d J J d J ++⎧⎫⎧⎫===⎨⎬⎨⎬++⎩⎭⎩⎭说明5到10的最短距离为4,路线为5—8-10决策变量为2(5)8S = 同理,从6出发时,有121(6,8)(8)63(6)min min 7(6,9)(9)34d J J d J ++⎧⎫⎧⎫===⎨⎬⎨⎬++⎩⎭⎩⎭说明6到10的最短距离为7,路线为6-9—10决策变量为2(6)9S = 从7出发时,有121(7,8)(8)33(7)min min 6(7,9)(9)34d J J d J ++⎧⎫⎧⎫===⎨⎬⎨⎬++⎩⎭⎩⎭说明7到10的最短距离为6,路线为7-8—10决策变量为2(7)8S = ⑶2N =本级有三种选择,计算过程如下:2322(2,5)(5)74(2)min (2,6)(6)min 471166(2,7)(7)d J J d J d J ++⎧⎫⎧⎫⎪⎪⎪⎪=+=+=⎨⎬⎨⎬⎪⎪⎪⎪++⎩⎭⎩⎭决策变量3(2)5(6)S =2322(3,5)(5)34(3)min (3,6)(6)min 27746(3,7)(7)d J J d J d J ++⎧⎫⎧⎫⎪⎪⎪⎪=+=+=⎨⎬⎨⎬⎪⎪⎪⎪++⎩⎭⎩⎭决策变量3(3)5S =2322(4,5)(5)44(4)min (4,6)(6)min 17856(4,7)(7)d J J d J d J ++⎧⎫⎧⎫⎪⎪⎪⎪=+=+=⎨⎬⎨⎬⎪⎪⎪⎪++⎩⎭⎩⎭决策变量3(4)5(6)S =⑷1N =本级决策是唯一的,计算结果为2422(1,2)(2)211(1)min (1,3)(3)min 471138(1,4)(4)d J J d J d J ++⎧⎫⎧⎫⎪⎪⎪⎪=+=+=⎨⎬⎨⎬⎪⎪⎪⎪++⎩⎭⎩⎭决策变量4(1)3(4)S =可确定最短路线为1-3-5-8—102.一维线性系统,设变量无约束,最优控制问题的数学模型为:22210(),k k k k k J qx ru T x ax bu +=+=+∑初始状态0x 为已知.式中,,,a b q r 为常数,0,=1r T >设。
现代控制理论 6 最优控制

(11)
对(11)式中的第三项进行分部积分,得
T J [ x ( t )] H ( x , u , λ , t ) d t λ ( t ) x λ ( t ) x d t f t T t f t 0
0
t f
t f
t 0
(12)
当泛函J 取极值时,其一次变分等于零。 即
T
将上式改写成
T T t H H f δ J λ ( t ) δ x ( t ) λ δ x δ u d t 0 f f t x ( t ) x u 0 f (13)
0
tf
( x ,x , t ) 及 x ( t ) 在 [ t 0 , t f ] 上连续可微, t 0 和 t f 给定, 其中, L
(t0) x x (tf ) xf ,x(t)Rn ,则极值轨线 x * ( t ) 满足如下欧 已知 x 0, 拉方程
L d L 0 x dt x
J [ x ( t t ( x , u , t ) d t f), f] L
t f t 0
(x ,u ,t) 是 x 、u 和t 的连续函数 最优。其中 L
最优控制问题就是求解一类带有约束条件的条件泛函极值问题。
补充:泛函与变分法
一、泛函与变分
1、泛函的基本定义: 如果对于某个函数集合 x(t)中的每一个函数 x (t ),变量J 都有一个 值与之对应,则称变量J 为依赖于函数 x (t ) 的泛函,记作 Jx ( t) 可见,泛函为标量,可以理解为“函数的函数” 例如:
由于 δ u 是任意的变分,根据变分法中的辅助引理,由(16)式得 (17) (14)式称为伴随方程, λ (t )为伴随变量,(17)式为控制方程。
第6章 最优控制
F * d F * 0 X dt X F * d F * 0 u dt u
解出 u 的表达式。
例题: 约束条件为: 初始条件为:
1 2 2 J Q (t )dt 2 0
Q(t ) u(t )
Q(0) 1 Q(0) 1 Q(2) 0,Q(2) 0 , ,
第六章 最优控制
——泛函及变分法 ——最小值原理
6.1 最优控制问题及其描述
6.1.1 最优控制问题的例子
飞船软着陆问题
宇宙飞船在月球表面上着陆时垂直速度必须为零,即软着陆。 这个问题必须靠控制发动机推力的变化来实现。问题是如何选择 一个推力方案,使燃料消耗最小。
设飞船的总质量为 m ,高度为 的重力加速度为 g ,推力为 u 。
取:x1(t ) Q(t ),x2 (t ) Q(t )
有:
x1 (t ) x2 (t ) x2 (t ) u (t )
x1 (t ) x2 (t ) 0 x2 (t ) u (t ) 0
x1 (t ) x2 (t ) f x2 (t ) u (t )
轨线1
x(t f )
t
此时终端不仅状态可变、终端的时间也是可变的。
F 0 F ( x) x t T
例题:求 x(0)=1 到直线 x(t)=2-t 的距离最短的直线:
解:目标函数为:
积分上限是可变的
x (t )
J
T
0
(1 x ) dt
T
F d F 0 x dt x
这是一个微分方程,其解中含有待定系数,通过给出的边界条件
x(t0 ) x0 , x(T ) x1
最优控制课后习题答案
最优控制课后习题答案最优控制课后习题答案最优控制是现代控制理论中的重要分支,它研究如何在给定约束条件下,使系统的性能指标达到最优。
在最优控制的学习过程中,课后习题是巩固理论知识、培养解决问题能力的重要环节。
本文将为大家提供一些最优控制课后习题的答案,希望能对大家的学习有所帮助。
1. 线性二次型最优控制问题考虑一个线性时不变系统,其状态方程和性能指标分别为:$$\begin{align*}\dot{x}(t) &= Ax(t) + Bu(t) \\J(u) &= \int_{0}^{T} (x^T(t)Qx(t) + u^T(t)Ru(t))dt\end{align*}$$其中,$x(t)$为系统的状态向量,$u(t)$为控制输入向量,$A$和$B$为系统矩阵,$Q$和$R$为正定矩阵,$T$为最优控制的时间段。
求解该问题的最优控制输入$u^*(t)$。
答案:根据最优控制的原理,最优控制输入$u^*(t)$满足以下的最优性条件:$$\begin{align*}\frac{\partial J}{\partial u}(u^*(t)) &= 2R u^*(t) + 2B^T P(t)x(t) = 0 \\\dot{P}(t) &= -PA - A^T P - Q + PBR^{-1}B^T P\end{align*}$$其中,$P(t)$为状态向量的共轭变量矩阵。
通过求解上述的代数方程和微分方程,可以得到最优控制输入$u^*(t)$和状态向量的共轭变量矩阵$P(t)$。
2. 非线性最优控制问题考虑一个非线性系统,其状态方程和性能指标分别为:$$\begin{align*}\dot{x}(t) &= f(x(t), u(t)) \\J(u) &= \int_{0}^{T} g(x(t), u(t)) dt\end{align*}$$其中,$f(x(t), u(t))$为非线性函数,$g(x(t), u(t))$为性能指标函数。
最优控制习题答案
最优控制习题答案1.设系统方程及初始条件为⎩⎨⎧=+-=)()()(2)()(1211t x t x t u t x t x,⎩⎨⎧==0)0(1)(21x t x 。
约束5.1)(≤t u 。
若系统终态)(f t x 自由,利用连续系统极大值原理求)(*t u 性能指标,)3(2x J =取最小值。
解:2.设一阶离散时间系统为)()()1(k u k x k x +=+,初值2)0(=x ,性能指标为∑=+=2022)(21)2(k k u x J ,试用离散系统最小值原理求解最优控制序列:)2(),1(),0(u u u ,使J 取极小值。
解:3.软着落、空对空导弹的拦截问题、防空拦截问题。
解答:4.设离散系统状态方程为)(2.00)(101.01)1(k u k x k x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=+,已知边界条件⎥⎦⎤⎢⎣⎡=01)0(x ,⎥⎦⎤⎢⎣⎡=00)1(x 。
试用离散系统最小值原理求最优控制序列,使性能指标∑==102)(03.0k k u J 取极小值,并求出最优的曲线序列。
解:属于控制无约束,N 不变,终端固定的离散最优控制问题,构造离散哈密尔顿函数)](2.0)()[1()](1.0)()[1()(03.0)(222112k u k x k k x k x k k u k H ++++++=λλ其中)1(),1(21++k k λλ为给定拉个朗日乘子序列,由伴随方程:)1()()(111+=∂∂=k k x H k λλ,)1()1(1.0)()(2122+++=∂∂=k k k x Hk λλλ得出 ⎩⎨⎧+==+==)2()2(1.0)1(),2()1()1()1(1.0)0(),1()0(2121121211λλλλλλλλλλ,由极值条件⎪⎪⎩⎪⎪⎨⎧>=∂∂=++=∂∂006.0)(0)1(2.0)(06.0)(222k u H k k u k u Hλ极小)1(310)(2+-=k k u λ可使min )(=k H ,令k=0和k=1的⎪⎩⎪⎨⎧-=-=)2(310)1(*)1(310)0(*22λλu u ,)(k u 带入状态方程并令k=0和1得到: 5.求泛函dtx x x x J ⎰++=102221211],[ 满足边界条件π===-=)3(,0)0(,0)3(,3)0(2211x x x x 和约束条件36221=+t x 的极值曲线。
最优控制习题及参考答案
最优控制习题及参考答案6212最优控制习题及参考答案习题 1求通过 x (0) = 1 , x (1) = 2 ,使下列性能指标为极值的曲线:t f J = ∫(x2 +1)dt t 0解: 由已知条件知: t 0=0 , t f= 1d由欧拉方程得:(2x ) = 0dtx = C 1x = C 1t + C 2将 x (0) = 1,x (1) = 2 代入,有:C 2 = 1,C 1 = 1得极值轨线: x *(t ) = t +1习题 2求性能指标:J = ∫ 1(x 2 +1)dt在边界条件 x (0) = 0 , x (1) 是自由情况下的极值曲线。
解: 由上题得:x * (t ) = C t + Cx * (t )63x f由 x (0) = 0 得: C 2= 0∂L由 ∂xt =tf= 2x (t f ) = 2C 1 t =t = 0t0 1于是: x *(t ) = 0【分析讨论】对于任意的 x (0) = x,x (1)自由。
6421∫ ⎩λ =有: C = x , C = 0 ,即: x *(t ) = x其几何意义: x (1) 自由意味着终点在虚线上任意点。
习题 3已知系统的状态方程为:x 1 (t ) = x 2 (t ), x 2 (t ) = u (t )边界条件为: x 1(0) = x 2(0) = 1 , x 1(3)= x 2(3) = 0 ,31 试求使性能指标 J =u 2(t )dt 2取极小值的最优控制 u *(t ) 以及最优轨线 x *(t ) 。
⎡ x ⎤解: 由已知条件知: f = ⎢ 2⎥⎢⎣ u ⎥⎦Hamiton 函数: H = L + λTfH = 1u 2+ λ x + λ u⎧λ = 0由协态方程: ⎨12121 2 2⎧λ = C① 得: ⎨1 1⎩λ2 = −C 1t + C2 ② ∂H由控制方程:∂u= u + λ2 = 0 得: u = −λ2= C 1t − C 2③由状态方程:x2 = u = C1t −C2得:x (t) = 1 C t2 −C t + C ④2 2由状态方程:x1 = x21 2 3得:x (t) = 1 C t3 −1 C t 2 + C t + C ⑤1 6 12 23 465661⎪⎩=− ∫⎡1⎤ ⎡0⎤将x (0) = ⎢ ⎢,x (3) = ⎢0⎢代入④,⑤, ⎣1⎦⎣ ⎦ 10联立解得: C 1 =由③、④、⑤式得:u * (t ) = 10t − 29,C 2 = 2 , C3=C 4 =1 9x * (t ) = 5 t 3 −t 2+ t +1 27 x *(t ) = 5 t 2 − 2t +1 29习题 4已知系统状态方程及初始条件为x =u , x (0) = 1试确定最优控制使下列性能指标取极小值。
第6章 最优控制
v h u g v M Ku M
从初始状态
h(0) h0 ,
厦门大学机电系
v(0) v0 ,
m(0) M F
4
现代控制理论
在时刻 T 实现软着陆,即终点条件为
h(T ) 0,
选择推力u(t) ,使
v(T ) 0
J M (T )
现代控制理论
总运费 f (x)为目标函数,最优任务为确定x使 f (x)最小。 但是x的取值范围:
x1 x2 x3 1500 x1 x4 900 x2 x5 600 x3 x6 1200
x4 x5 x6 1800
变成了一个具有约束的优化问题。 目标函数用J来表示: 约束的条件为:
现代控制理论
第七章 线性二次型最优控制
1 2 3
概述
静态最优问题的解 泛函及其极值
厦门大学机电系
现代控制理论 第六章 最优控制
着重介绍最优控制系统的基本概念、基本理论及其应用。 要点: 1 最优控制的概念 2 变分法 3 极小值原理 4 动态规划 5 线性最优控制器的设计 难点: 线性最优控制器的设计
式中x为n维状态向量;u为r维输入向量;y为m维输出向量 f(x,u,t) 和 g(x,u,t) 分别为 n 维和 m 维关于状态向量 x、输入向量 u 和时间t的非线性函数向量。
7
厦门大学机电系
现代控制理论
被控系统的数学模型
对许多实际被控系统,在一定精度范围内, 其最优控制问题中的数 学模型也可以分别采用 – 线性定常系统 – 线性时变系统 – 非线性定常系统 的状态空间表达式来描述。
22
厦门大学机电系
现代控制理论
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. 有十个城市①为起点,⑩为终点。
站与站之间称为段,每段路程所用的时间(小时)写在段上,则应如何行使,让从①到⑩所花的时间最短。
解:⑴ 4N =11(8)3,(9)4J J ==将距离数字标注于图中,数字旁括号内的文字表示相应的决策变量。
由于从8到10及从9到10都只有一种可能,所以本级无决策问题。
⑵3N =本级决策有三种选择。
每种选择中又有两条可能的路线。
例如,从5出发,可达8,也可达9,所以131(5,8)(8)13(2)min min 4(5,9)(9)44d J J d J ++⎧⎫⎧⎫===⎨⎬⎨⎬++⎩⎭⎩⎭说明5到10的最短距离为4,路线为5-8-10决策变量为2(5)8S =同理,从6出发时,有121(6,8)(8)63(6)min min 7(6,9)(9)34d J J d J ++⎧⎫⎧⎫===⎨⎬⎨⎬++⎩⎭⎩⎭说明6到10的最短距离为7,路线为6-9-10决策变量为2(6)9S = 从7出发时,有121(7,8)(8)33(7)min min 6(7,9)(9)34d J J d J ++⎧⎫⎧⎫===⎨⎬⎨⎬++⎩⎭⎩⎭说明7到10的最短距离为6,路线为7-8-10决策变量为2(7)8S = ⑶2N =本级有三种选择,计算过程如下:2322(2,5)(5)74(2)min (2,6)(6)min 471166(2,7)(7)d J J d J d J ++⎧⎫⎧⎫⎪⎪⎪⎪=+=+=⎨⎬⎨⎬⎪⎪⎪⎪++⎩⎭⎩⎭决策变量3(2)5(6)S =2322(3,5)(5)34(3)min (3,6)(6)min 27746(3,7)(7)d J J d J d J ++⎧⎫⎧⎫⎪⎪⎪⎪=+=+=⎨⎬⎨⎬⎪⎪⎪⎪++⎩⎭⎩⎭决策变量3(3)5S =2322(4,5)(5)44(4)min (4,6)(6)min 17856(4,7)(7)d J J d J d J ++⎧⎫⎧⎫⎪⎪⎪⎪=+=+=⎨⎬⎨⎬⎪⎪⎪⎪++⎩⎭⎩⎭决策变量3(4)5(6)S =⑷1N =本级决策是唯一的,计算结果为2422(1,2)(2)211(1)min (1,3)(3)min 471138(1,4)(4)d J J d J d J ++⎧⎫⎧⎫⎪⎪⎪⎪=+=+=⎨⎬⎨⎬⎪⎪⎪⎪++⎩⎭⎩⎭决策变量4(1)3(4)S =可确定最短路线为1-3-5-8-102.一维线性系统,设变量无约束,最优控制问题的数学模型为:22210(),k k k k k J qx ru T x ax bu +=+=+∑初始状态0x 为已知。
式中,,,a b q r 为常数,0,=1r T >设。
求最优控制序列。
解: 本题为三级决策问题. 因为=1T ,22210(),k k k k k J qxru T x ax bu +=+=+∑①令3,2N k ==*22122322,J qx ru x ax bu =+=+因为k u 无约束,故令*12220J ru u ∂==∂求得*20u =将上述结果代入*1J 方程,易得*212J qx = ② 2,1N k == 211x ax bu =+*22*2111222121222111122221111()[()](1)2()J qx ru J q x x ru q x ax bu ru q a x abqx u qb r u =++=++=+++=++++*2211122()0J abqx qb r u u ∂=++=∂解得*1121abq u x qb =-+将上述结果代入*2J 方程,易得 2222*222122(32)[(1)](1)a qb qb r J q a x qb ++=+++ ③ 1,0N k == 100x ax bu =+*22*3002222222220122222222220022(32)[(1)](1)(32)[(1)]()(1)J qx ru J a q b qb r qx ru q a x qb a q b qb r qx ru q a ax bu qb =++++=+++++++=++++++解得*0u 将上述结果代入*3J 方程,易得 3. 22210(),k k k k k J xru T x ax bu +=+=+∑,求最优控制序列。
解:本题为三级决策问题. 因为=1T ,22210(),k k k k k J xru T x ax bu +=+=+∑①令3,2N k ==*22122322,J x ru x ax bu =+=+因为k u 无约束,故令*12220J ru u ∂==∂求得*20u =将上述结果代入*1J 方程,易得*212J x = ② 2,1N k == 211x ax bu =+*22*2111222121222111122221111()[()](1)2()J x ru J x x ru x ax bu rua x abx ub r u =++=++=+++=++++*2211122()0J abx b r u u ∂=++=∂解得*1121ab u x b =-+将上述结果代入*2J 方程,易得 222*222122(32)[(1)](1)a b b r J a x b ++=+++③ 1,0N k == 100x ax bu =+*22*30022222222012222222220022(32)[(1)](1)(32)[(1)]()(1)J x ru J a b b r x ru a x b a b b r x ru a ax bu qb =++++=+++++++=++++++解得*0u 将上述结果代入*3J 方程,易得4.运用动态规划方法确定下列系统的最优控制3220(1)2()(),0,1,2,3[()()]t x t x t u t t J x t u t =+=+==+∑解:本题为四级决策问题。
① 3t =,(4)2(3)(3)x x u =+ *221(3)(3)J x u =+*12(3)0(3)J u u ∂==∂求得(3)0u =将上述结果代入*1J 方程,易得*21(3)J x = ②2t =,(3)2(2)(2)x x u =+,*22*2122222(2)(2)(2)(2)(3)5(2)2(2)4(2)(2)J x u J x u x x u x u =++=++=++*24(2)4(2)0(2)J u x u ∂=+=∂解得(2)(2)u x =-上述结果代入*2J 方程,易得*223(2)J x = ③1t =,(2)2(1)(1)x x u =+*22*3222222(1)(1)(1)(1)3(2)13(1)4(1)12(1)(1)J x u J x u x x u x u =++=++=++*38(1)12(1)0(1)J u x u ∂=+=∂解得3(1)(1)2u x =-上述结果代入*3J 方程,易得*233(1)J x = ④0t =,(1)2(0)(0)x x u =+*22*4322222(0)(0)(0)(0)4(1)17(0)5(0)16(0)(0)J x u J x u x x u x u =++=++=++*410(0)16(0)0(0)J u x u ∂=+=∂解得8(0)(0)5u x =-上述结果代入*4J 方程,易得*2421(0)5J x =5.系统方程为00()(),()dx ax t bu t x t x dt =-+=求最优控制使12210()tJ cx t u dt =+⎰取最小值,此处,,a b c 均为正常数。
解:令***2(,,)()()T T J J J H x u u ax bu x x x ∂∂∂=-+∂∂∂ ①对**(,)J u x x∂∂隐式解。
因为()u t 无约束,故令****120(,)=-2T T H J J J u b u x b u x x x∂∂∂∂=+=∂∂∂∂得 因为2220H u ∂=>∂故求得的**(,)J u x x∂∂可使哈密顿函数H 极小。
把***1(,)=-2T J J u x b x x ∂∂∂∂代入哈密顿—雅可比方程得:2***21()4T J J J b ax t x x⎛⎫∂∂∂=+ ⎪∂∂∂⎝⎭ 考虑该问题为定常问题,且f t 自由,因此最优函数仅为()x t 的函数,因此有2**21()04TJ J b ax x x ⎛⎫∂∂+= ⎪∂∂⎝⎭可得*=0x J ∂∂或*24a =-bJ x x ∂∂即可得:2**22a (bJ M x ==-恒值)或J **2=0=-a x b u u 最优控制或6.对于系统422,[]2x x u J u x dt ==++⎰最小化写出哈密顿-雅可比-贝尔曼方程式。
解:构造哈密顿函数**242J 1J L ()X 2xT H f x x u u ∂∂=+=+++∂∂ 根据哈密顿-雅可比方程有***242J J 1J min L min[()]2x T f x x u u x x ⎡⎤∂∂∂-=+=+++⎢⎥∂∂∂⎣⎦考虑控制不受限制可得:***H J 1J 20u 2u u x x ∂∂∂=+=→=-∂∂∂ 所以:**242J 11J ()24Xx x t ∂∂-=++∂∂。