直流电机模型参数的直接辨识_周儒勋
无刷直流电动机的数学模型建立及参数辨识

阻较小, 散热容易 . 因此, 永磁无刷直流电机在保持 了普通直流电机 良好的调速和起动性能的同时, 还具有 无换 向火花及无线电干扰、 寿命长、 运行可靠 、 维护简便等特点… . 永磁无刷直流电机既具有永磁有刷直流 电机优良的机械特性和控制特性, 又克服了有刷电机的缺点, 具有更强的竞争力 . 此外 , 它的转速不受换相 的限制, 若采用空气轴承或磁悬浮轴承 。 可以在每分钟高达几十万的转速中运行 . 即使与 同样也是无刷结
・ 收稿 日期 -06 0— 4 " 0 —1 2  ̄ 作者筒介 : 张秀番 ( 5 一 , , 1 6 ) 女 河南西平人 , 9 高级实验师 .
维普资讯
第4 期
张秀香 : 刷直流电动机的数 学模型建立及参数辨识 无
・2 ・ 9
[言三+ 暮+ 兰 虽[ 摹[三 ] ][ ] ] = 兰 芝 [ ] ] 主 [
1 无 刷直 流 电动机 数 学模 型
无 刷直 流电动机 主要 由永 磁 电动机本体 、 制 电路 和位 置检 测 3部分 组 成 , 转 子 由永 磁 器 组成 , 控 其 定 子上存 在着 多相绕组 . 其转子 采用永 磁体励 磁 , 有激 磁损 耗 ; 热的 电枢绕组 通常装 在外 面 的定子上 , 没 发 热
圄 1 无 刷 直 流 电动 机 等 效 电 路
一
T () Ls
图 2 无 刷 直 流 电 动 机 动 态 结构
2 无 刷 直 流 电动机 的 参数 辨 识
调节器的参数整定时。 希望 电机的参数越精确越好 , 而往往电机厂商并不提供图 1 所示的参数 , 需要
p
[ / 。 ]一虽[ c / c / {[ ])4 ]工 [ 三一 = - 工 兰 ,[ [ ‘ 蔓 ] ]; ]
无刷直流电机反电势滑模观测及参数在线辨识

r e s u l t a r e a n a l y z e d. Th e n,Ly a p u n o v s t a b i l i t y t h e o r y i s e mp l o y e d t o d e s i g n a n o v e l a d a p t i v e SMO b y
a c h i e v e d a n d t h e o n l i n e i d e n t i f i c a t i o n o f t h e s t a t o r r e s i s t a nc e a n d i nd u c t a n c e i s i mp l e me n t e d s i mu l t a n e o u s l y .S i mu l a t i o n a n d e x pe r i me n t r e s u l t s de mo n s t r a t e t h a t t h e p r o p o s e d s t r a t e g y c a n b e u s e d t o
A b s t r a c t : T h e p e r f o r ma n c e o f t h e t r a d i t i o n a l s l i d i n g m o d e o b s e r v e r ( S M O) d e p e n d s o n t h e a c c u r a t e
S H I T i n g - n a , Z H A N G Q i a n , X I A O Y o u - w e n , X I A C h a n g —l i a n g
( S c h o o l o f E l e c t r i c a l E n g i n e e r i n g a n d A u t o m a t i o n ,T i a n j i n U n i v e r s i t y , T i a n j i n 3 0 0 0 7 2 , C h i n a )
利用ARMA模型的直流电机模型的辨识

中图分 类号 : T P 3 9 1 . 9
文献标 志 码 : A 文章 编号 : 1 6 7 2—8 5 1 3 ( 2 0 1 4 ) 0 1— 0 0 7 1— 0 4
DC mo t o r i d e n t i i f c a t i o n b a s e d o n ARM A mo d e l
云南 民族大 学学报 : 自然科学版 , 2 0 1 4 , 2 3 ( 1 ) : 7 1 — 7 4
d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 6 7 2—8 5 1 3 . 2 0 1 4 . 0 1 . 0 1 6
C N 5 3— — 1 1 9 2 / N I S S N 1 6 7 2. . 8 5 1 3
L I U L i — x i n , C AO Yu n — f e n g , Z HUANG L i — k u i , W ANG Bi a o
( 1 .C o l l e g e o f A u t o ma t i o n ,N a n j i n g U n i v e r s i t y o f A e r o n a u t i c s a n d A s t r o n a u t i c s , N a n j i n g 2 1 0 0 1 6 , C h i n a ; 2 .C o l l e g e o f A d v a n c e d T e c h n o l o g y ,N a n j i n g U n i v e r s i t y o f A e r o n a u t i c s a n d A s t r o n a u t i c s, N a n j i n g 2 1 0 0 1 6 , C h i n a )
三自由度转台系统参数辨识及控制器的设计

回转 转 台转 过 不 同 的 角 度 , 比
较其 控制效 果 , 结果 如 图 9 所
示。
纵 坐 标 是 转 台转 过 的 角 度 。 由图可 得 系统 数 学 模 型 的各
图 9 比较图
从 实 际 控 制 过程 可 以看 出
参数 可按 下列诸 式计算 :
三 = To _=二二====== 1 () 2
为此这 里选 用 常规 P D控 制器 、 分 分 离 P D 控 I 积 I
[ ]刘金 昆. 2 先进 PD控制 MAT A I L B仿真[ . 京 : M]北 电子
工 业 出版 社 ,0 1 2 1
[ ]于双 , 3 王旭永. 三轴转台中框双 马达 驱动控制 技术研究
[] 制造技术与机床 ,0 6 1 ) 15 0 J. 20 (2 :0  ̄1 7 [ ]王本永 , 克定 . 4 赵 提高液压三轴仿真 转台位置 控制精度
积分 分离 PD控 制器 和变 速 积分 PD控 制 器 的响 I I 应速 度快 , 并且 控制转 台转 动 的精 度 要 比常 规 PD I 的控 制精 度高 。
√ ( ( +n 2 1 )
一
5 实验 结 论
去n l
)kM。 2 十l 2 n)
一 1 1 K一2 . 。 ., 8 6
舰船 电子工程 ,0 8 2 ( ) 20 ,8 7 [0 1 ]汪洋亮 , 国胜 , 中良基 于 P D的高速无 人机高度 王 李 I
控制系统设计 []舰船 电子工程 , 0 ,92 J. 2 92 () 0 [1 - ]葛金来 , 1 张承慧 , 催纳新. 模糊 自整定 PD控制在三 自 I
特 点 设 计 几种 控 制 器 , 用 MAT AB进行 仿 真 , 利 L
直流电机参数辨识的实验方法.doc11

直流电机参数辨识的实验方法摘要本文的主要目的是估计的直流电动机的参数实验采用一个综合的离散测量测功机。
正在审议的参数是电机电枢绕组电阻和电感,反电势常数,电机转矩常数,转动惯量和粘性摩擦。
测功机输出的电枢电流,离散角速度测量,电枢电压(系统输入法),由电机开发的扭矩。
在这个文件的直流电动机参数辨识采用最小二乘算法,是实施过程中不受一个D/ A转换器和功率放大器使用。
特别是,电枢电压产生使用的主要推动者和同步发电机。
数据采集系统是由现有的测功机具有特殊的软件相结合的数据收集不同导致收购在指定的固定时间间隔自动测量。
一个卡尔曼滤波器也实现,作为一个国家的观察员,估计角加速度与电枢电流的导数。
此外,为提高整体识别性能,直流参数进行了第一次估计解耦AC参数使用DC输入信号。
随后,估计直流参数,然后用来识别交流参数。
实验结果来说明了该系统的效率。
本文的主要目的是应用集成测功仪的离散测量方法实验性的估算直流电机参数。
估算的参数有电动机电枢绕组电阻,电感,反电动势常熟,电机转矩常数,转动惯量和粘滞摩擦系数。
这款测功仪的输出是绕组电流,角速度,电枢电压(系统输入)和电机转矩的离散值。
文中直流电机的参数辨识,采用了最小平方法,并且在运行中不需要使用D/A转换器和功率放大器。
而且,电枢电压由一个原动机和一个同步发电机提供。
数据采集系统由在一设定的时间间隔自动测量收集数据的特殊的测功仪数据收集软件组成的。
为了估算角加速度和电枢电流,应用了卡尔曼滤波器,作为实时观测器。
此外,为了改善整体辨识性能,首先通过计算使用直流输入信号的交流参数来估算直流参数。
实验结果证实了该系统的有效性。
关键词你没翻译关键词:直流电机参数辨识卡尔曼滤波器1 简介目前,对于采用多种技术参数辨识。
梯度算法,它是一个最速下降法辨识误差最小化。
随机状态估计,那里的参数集考虑到是该制度,这是一个卡尔曼滤波器估算未知状态。
对于线性时不变系统,最小二乘算法is.widely使用。
z直流电机模型时变参数的在线辨识方法分析

e (θ, k) =ω ( k) - θT < ( k)
(7)
优化的目标为使得模型误差的平方和最小 ,
即给定一个长度为 N 的数据记录 ,使得
最小 的
N
∑ JN (θ) = e (θ, k) 2 k =1
θ 值, 计 为 最 优 估 计 值
θ^ (N ) ∈argm inJN (θ) 。
可实现上述寻优过程的在线递推算法有 :递
=
(1
-
0
λ
)
P(k +1)
+λ0 I
1
P (0) =λ1 I
式中 I为单位矩阵 。
4) PA 算法 。
θ( k + 1)
=θ( k)
+
<
(
k
< (k +1) +1) T< ( k
+
1)
e
(θ(
k)
,
k
+
1)
,
θ(0) =θ0
P(k
+ 1)
=
P ( k)
-
P ( k) < ( k 1 + <(k
+ +
(内蒙古工业大学 电力学院 ,呼和浩特 010110)
摘 要 :为解决直流电动机实际运行中模型参数因受到运行环境 、工况等条件的影响而导 致其建模不精确的问题 ,研究和比较了递推最小二乘法 、指数遗忘的递推最小二乘法 、矩阵规范 化的递推最小二乘法 、投影算法 、正则化的最小二乘法 5种实时参数估计方法 。引入平方误差 积分准则 、时间平方误差积分准则 、绝对误差积分准则和时间绝对误差积分准则 ,对实时参数估 计的精度和效果进行评判 。计算机仿真结果表明 ,对于时变的直流电动机模型参数 , RLSEF算 法具有在误差积分准则意义下的最优辨识精度 。 关 键 词 :参数辨识 ;自适应控制 ;最小二乘法 ;误差积分准则 中图分类号 : TN945. 12 文献标识码 : A 文章编号 : 1674 - 8425 (2011) 01 - 0091 - 06
直流电机的模型建立与参数辨识
直流电机的模型建立与参数辨识直流电机是一种常见的电动机,广泛应用于各个领域,如工业生产、交通运输和家用电器等。
为了控制和优化直流电机的性能,我们需要建立一个准确的数学模型,并确定模型的参数。
本文将详细介绍直流电机的模型建立与参数辨识方法。
1. 直流电机模型直流电机可以简化为一种旋转的能量转换装置,它将直流电能转换为机械能。
直流电机模型通常分为两种:简化模型和详细模型。
简化模型是基于电机的基本原理和假设,通过几个关键参数来近似描述电机的行为。
其中最常用的模型是电力模型和电流模型。
电力模型假设电机转速保持恒定,可以通过电源电压和电机电流来估算电机输出的功率。
电流模型假设电机的电压保持恒定,可以通过电流和转矩关系来估算电机的转速。
详细模型则更加精确,考虑了电机的动态响应,包括电枢电压、反电动势、电感和电阻等因素。
详细模型可以通过Kirchhoff电路定律和电机的物理特性方程来建立。
其中最常用的是Laplace域模型和状态空间模型。
2. 直流电机参数辨识方法直流电机的参数辨识是指通过实验数据来确定模型的参数,以准确描述电机的动态行为。
常用的参数辨识方法有试验法和辨识法。
试验法是通过对电机进行一系列实验观测,采集电机的输入输出数据,并应用数学统计方法来估计参数值。
试验法需要在实际工作条件下进行,确保测试环境的准确性和稳定性。
辨识法是一种基于最优化理论的方法,通过对已知输入输出数据进行数学建模,并利用最小二乘法或其它最优化算法来求解最优参数。
辨识法可以基于频域或时域数据进行辨识,常用的方法有傅里叶变换法、极小二乘法和卡尔曼滤波法等。
辨识方法的选择应根据实际需求和可用数据的特点来确定。
试验法较为简单,适用于实验室环境下的实际测试;辨识法更加精确,适用于手头有大量数据并希望得到相对准确的参数估计的情况。
3. 直流电机参数辨识的挑战直流电机参数辨识虽然在理论上可行,但实际上会面临一些挑战。
首先,直流电机的参数具有不确定性和非线性,由于摩擦力、磁阻力和电机内部热量等因素的影响,电机的参数在不同操作条件下会有所变化。
直流电动机模型参数分析教案

直流电动机是一种在工业应用中广泛使用的电机类型。
对于工程师和技术人员来说,理解直流电动机的模型参数对于正确设计和优化电机控制系统至关重要。
在这篇文章中,我们将探讨直流电动机模型参数分析的教学内容和方法,以帮助学生和从业人员掌握这一技能。
一、教学目标直流电动机模型参数分析是电机控制系统设计和优化的关键技能。
本教学的目标是:1.理解直流电动机的物理原理和结构。
2.熟练掌握直流电动机的模型参数及其测量方法。
3.了解直流电动机的控制方法和技术,并能够将它们应用到实际控制系统中。
二、教学内容本教学的内容包括:1.直流电动机的结构和原理。
学生应该熟悉直流电动机的构成、工作原理和分类。
2.直流电机参数的测量方法。
包括电阻、电感、电动势等电机参数的测试方法。
3.直流电机模型参数的计算。
介绍直流电动机各个模型参数的计算方法和意义。
4.直流电机的控制方法。
介绍电机控制系统设计和优化的基本原理和方法。
三、教学方法本教学采用多种教学方法,以提高学生的理解和应用能力。
1.讲解法通过讲解和演示,介绍直流电动机的原理、结构和控制方法。
讲解过程中,注重理论和实践相结合,使学生能够更好地理解理论知识,将其应用到实际中。
2.实验式教学法在课堂上进行小组实验,模拟直流电机的基本特性,以加深学生的理解。
此外,在课外还应进行一些实际操作,如电机参数测量、控制系统设计等,以提高学生的实际能力。
3.互动式教学法通过讨论、问答等方式,加强学生之间的互动和交流。
引导学生提出问题和思考,促进学生的独立思考和创新思维。
4.独立学习法通过阅读文献、参加研讨会等方式,鼓励学生独立学习和思考,深入了解直流电机参数分析的相关知识。
四、教学评估针对本教学的内容,教师可以采取以下评估方法:1.课堂测试。
在课堂上进行小测验,测试学生对于直流电动机模型参数的掌握情况。
2.报告评估。
要求学生根据所学知识,撰写相关报告,评估学生的研究能力和文献阅读能力。
3.设计评估。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
以看出, 利用传统的经验方法可以大概求 得的直流 电机的传
递函数, 但所得结果不能够很好地近似逼 近直流电 机的动态
过程, 误差比较大, 不能在线获得参 数, 而 且必须在 所有铭牌
参数都知道的情况下 才能求直流电机的传递 函数。因此传统
方法已经不能满足要 求。
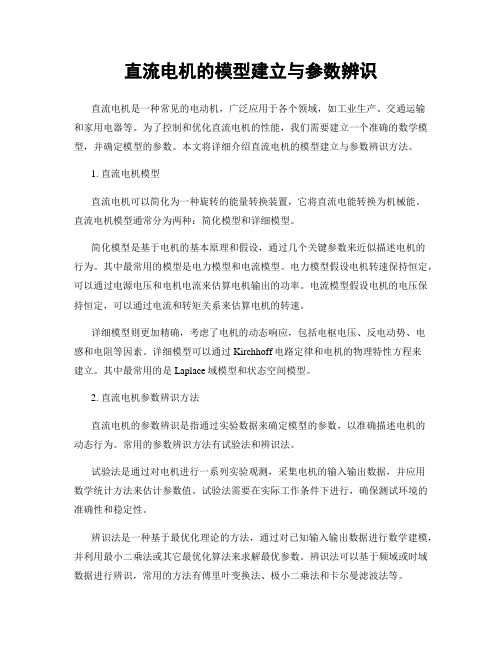
图 2 直接辨识算法获得的玠跃响应仿真曲线 与采样曲线对 比 图
图 1 传统方法获得的阶跃响应仿真曲线与采样曲线对比图
3. 2 利用直接辨识算法求直流电机模型参数 令采样得到 200点数据为 y ( iT s ) , i = 1, 2, 3, #N , N =
3 仿真与分析
选取一直流电动机 为例, 其铭牌参 数为: 额定电压 Ue = 230V, 额定电流 Ie = 10 4A, 额定转速 ne = 377rad /s, 额定输 出 功率 Pe = 2 0KW, 电动机轴上的转动惯量 J = 0 027J& s2。 给 此直流电动机加一阶跃电压 a = 230 V 利用测速发电机测 出该电动机的转速, 并用存储示波器记录 该电动机转 速的变 化, 然后以 100 H z的采样频率 对其 0 ~ 2 s内的转速 进行采 样, 共采得 200个点。本文利用传统方法和直接辨识分别仿真 出该电机的阶跃响应曲 线, 并与采样曲线进行了比较。 3. 1 利用传统方法求直流电机模型参数
入电压的传递函数模 型为
H ( s)
=
( s) Ua ( s)
=
1 /Ce Tm T a s2 + Tm s +
1
1 786 = 0 0022s2 + 0 17s + 1
令 T 1 = Tm , T2 = T a, K = 1 /Ce 代入式 ( 5), 利 用M AT LAB 仿真出该曲 线, 并与采样曲线进行比较如图 1所示。由 图 1可
第 23 卷 第 06期 文章编号: 1006 - 9348( 2006) 06 - 0113 - 03
计算机仿真
直流电机模型参数的直接辨识
2006年 06月
周儒勋, 张泽龙, 亓迎川
(空军雷达学院电子对抗系, 湖北 武汉 430019)
摘要: 直流电机的数学模型计算是直流调速系统设计的重要环节, 传统方法求解得的直流电机模型参数误差大, 且不能获得 在线参数辨识。为了求出精确的直流电机模型参数, 该文给出了求解直流电机数学模型的直接辩识算法, 并以一个电机的实 验为例, 分别用传统方法和直接辨识算法求出了这个电机的模型参数, 和阶跃响应曲线。通过对这两种方法所求得的结果进 行仿真比较, 证明直接辨识算法可行, 模型的精确性有明显改善。 关键词: 直接辩识; 直流电机; 传递函数 中图分类号: TM 33 文献标识码: A
∀# = ∃ + %
( 10)
式中 #
=
T
2 2
T 2 ( + 1) K∃ = [ T 1T 2 T 1 + T 2 K ]
y(Ts)
A (T s )
-
1 2
a
(T s
)2
∀=
y ( 2T s )
A ( 2T s )
-
1 2
a(
2T
s
)
2
&
&
&
y (N T s ) A (NT s )
-
1 2
(N T s ) 2
算整理得直流电机转速 相对于输入电压的传递函数模型为
H ( s)
=
( s) Ua ( s)
=
1 /Ce Tm T a s2 + Tm s +
1
( 3)
式中机 械 时 间 常 数 Tm = JRa /Ce CT , 电 气 时 间 常 数 T a =
La /Ra。
获取过程传递函数 模型最常用、最方 便的方法是 直接辨
∀ ∀ tw ( t) d t] + T 2 ( + 1) [ y ( t) d t- aK + aKT 2 (
0
0
∀ + 1) -
w ( t)dt]
0
+
T
2 2
[y(
)-
aK
- w(
)] -
∀ aK ( 2 +
+ 1) T22 +
tw ( t) d t
0
( 8)
令
∀ ( ) = t! ( t) d t0
收稿日期: 2005 - 04 - 26
2 直流电机模型的直接辨识原理
直流电机的电气方 程和机械方程分别为 [ 3]
La
d ia dt
=
ua -
ia ra
- Ce
( t)
( 1)
Jd
( t) dt
=
T - TL
( 2)
式中 T = CT ia, J 为折算到电动机轴上的总转动惯量, Ce 为电 机电势系数。把式 ( 1)、式 ( 2) 进行 拉普 拉斯变 换, 并进 行计
B ( T s ) - T sA (T s ) T
(T s )
∃ = B ( 2T s ) - 2T sA ( 2T s ) , % = &
( 2T s ) &
B (N T s ) - NT sA (NT s ) 可得参数 # 的最小二乘估计为
(NT s )
%
#
=
(∀T ∀ )-1∀T ∃
( 11)
3 82Ue ne Ie
=
0 235
H
电机输出额定转距
Me =
9 55P e = ne
5 3 N& m
转距系数
CT
=
Me Ie
=
0
51 N&
m /A
电气时间常数
Ta =
La Ra
=
0 0129 s
机械时间常数
Tm
=
JR a C eC T
=
0 13 s
因此把 Tm 、T a、Ce 代入式 ( 3) 得直 流电机 转速相 对于输
T 1T 2 ! ( ) 则由式 (8) 可得
∀ ∀ ! ( t) d t -
0
(T 1 + T 2 )
!( t)d t -
0
B( ) - A( ) - ( )
T
2 2
= y( ) A ( ) - a 2 2
T2( + 1)
( 9)
K
114
据上式可对模型参数进行最 小二乘运算。对采样 点 =
T s, 2T s, 3T s #, NT s, T s 为采样间 隔, N 为 采样 的点 数, 可 构成 线性方程组
t! 0
( 6) 为构建线性方程 , 则令
∀ ∀ A ( ) = y ( t) dt, B ( ) = y ( t) td t
0
0
于是得
∀ A ( ) = y ( t) d t 0 = aK +
aKT 2 -1
2 e- T 2 - e-T 2 - 2 + 1 +
∀w ( t) d t
0
( 7)
∀ B ( ) =
利用该电机的铭牌 参数, 并由经验公式得 [4] 电机电枢内阻
Ra 电机电势系数
Ue Ie 2I2e
Pe
=
1 812
Ce =
30( U e - IeRa ) ∋n e
=
0 56
V & s/ rad
电枢电感 La
3 82Ue H pne Ie
其中 p 为极对数, 在此 电机中 p = 1, 因此
La
=
1 引言
在高精度直流伺服系统和 直流调速系统中, 直 流电机作 为执行元件有着广泛的应用。系统的设计 依赖于直 流电机的 模型参数的计算结果, 直流电机的数学 模型来自 于它的 2个 方程, 即它的电气方程 和机械 特性 方程。在 方程 参数已 知的 情况下, 可以得到电机 的模型 参数, 传 统方 法是 利用经 验公 式和实验法获得有关 静态 参数, 模 型误差 大, 且 不能获 得在 线参数辨 识。本文给 出了直 接辨识 算法 [1~ 2] , 利 用直接 辨识 算法和传统方法分别 获得了直流电机的模型 参数, 并进行了 仿真比较, 通过比较可以证明直接辨识算 法能够简 单有效地 在线或离线获得直流 电机传递函数模型, 并且所获 得直流电 机传递函数模型比传 统方法精确。
型。
对于式 ( 4), 阶跃输入幅度为 a时, 阶跃响应为
y ( t) = aK 1 -
T1
e-
t T1
+
T2
e-
t T2
T1 - T2
T1 - T2
t ! 0 ( 5)
令 T 1 = T2, 加入白噪声 w ( t) , 则
y ( t) = aK 1 -
-
e1
t T2
+
1 -
e-T 1
t 2
+ w ( t)
AB STRACT: H ow to w ork out the m athem atic m ode l o f D C e le ctrom oto r is ve ry im portan t to design a DC ad justed ve loc ity system. T he param e ter e rro r o f the DC e lectrom o tor m ode l wo rked out by traditiona l m ethod is b ig, and the in - line param e ter identifica tion can t be acqu ired by trad itiona l m ethod. In o rde r to w ork out the m ode l param ete r o f DC e lectrom otor, this paper g ives a d irect identifica tion a rithm etic w hich is used to w ork out D C e lectrom o tor m athem a tic m ode.l T ak ing an e le ctrom oto r as ex am ple, the e lectrom o tor mode l param e ter and its step response curve are wo rked ou t by tradit iona l m ethod and the d irect iden tification ar ithm e tic re spective ly. T hrough the compa rison o f the two sim u lation resu lts, it is prov ed that the d irec t identifica tion a rithm etic is feas ib le and the ac curacy o f the m odel is im proved c lear ly. K EYW ORDS: D irect iden tification; D irect cu rrent e le ctrom oto r; T ransfe r func tion