机械原理牛头刨床课程设计
牛头刨床机械原理课程设计2点和8
牛头刨床机械原理课程设计2点和8牛头刨床是一种常用的金工机床,用于加工木材表面,使其光滑平整。
以下是关于牛头刨床机械原理的内容参考。
1. 机械原理简介:牛头刨床是通过传动装置驱动主轴旋转,由牛头带动刀具在工件上运动,将工件表面的毛糙部分刨掉,实现加工目的。
刨床的主要结构有床身、工作台、传动系统和切削系统等。
2. 机械传动系统:机械传动系统是牛头刨床的核心部分,它由电动机、皮带传动装置和主轴组成。
电动机通过皮带传动将动力传递到主轴上,使主轴可以高速旋转。
这种传动方式具有结构简单、传动效率高的优点。
传动系统的设计需要考虑传动比的选择,一般通过调节皮带张紧装置来实现。
传动比的选择要根据刨床的工作要求和加工材料的硬度来确定,这可以通过实验和经验得出。
传动系统还需要考虑传动装置的耐磨性和故障率,以确保牛头刨床的稳定性和可靠性。
8. 切削系统:切削系统是牛头刨床的另一个重要组成部分,它包括牛头、刀具和切削力控制系统。
切削力控制系统通过牛头的压力和角度控制切削的大小和速度,从而实现对工件的加工。
牛头是刨床的主要工作部件,它由牛头骨架和刀具组成。
牛头骨架是一个固定在工作台上的装置,通过调节牛头骨架的位置和角度,可以实现对工件表面的不同加工。
刀具是通过螺栓固定在牛头骨架上的,一般采用锥形刀具,具有较强的切削性能。
切削力控制系统主要由牛头的压力和角度调节装置组成。
牛头的压力调节装置可以通过调节压力手柄来改变牛头对工件的压力,从而实现加工切削力的控制。
牛头的角度调节装置可以通过调节角度手柄改变刀具相对于工件的角度,控制加工表面的刨削角度。
总结:牛头刨床机械原理的课程设计中,重点需要涉及到机械传动系统和切削系统的设计。
在机械传动系统中,要考虑传动比的选择、皮带张紧装置的设计,以及传动装置的稳定性和可靠性。
在切削系统中,要了解牛头的结构和刀具的选用,以及切削力控制系统的设计。
以上参考内容可作为设计时的参考,帮助理解牛头刨床的机械原理。
《机械原理》课程设计_牛头刨床
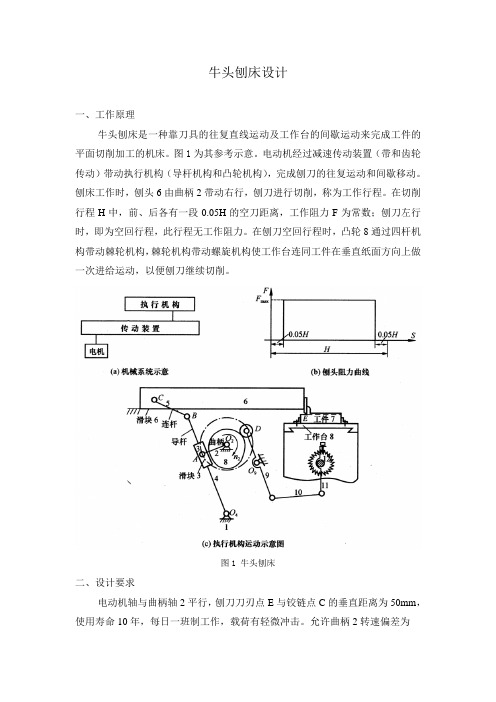
牛头刨床设计一、工作原理牛头刨床是一种靠刀具的往复直线运动及工作台的间歇运动来完成工件的平面切削加工的机床。
图1为其参考示意。
电动机经过减速传动装置(带和齿轮传动)带动执行机构(导杆机构和凸轮机构),完成刨刀的往复运动和间歇移动。
刨床工作时,刨头6由曲柄2带动右行,刨刀进行切削,称为工作行程。
在切削行程H中,前、后各有一段0.05H的空刀距离,工作阻力F为常数;刨刀左行时,即为空回行程,此行程无工作阻力。
在刨刀空回行程时,凸轮8通过四杆机构带动棘轮机构,棘轮机构带动螺旋机构使工作台连同工件在垂直纸面方向上做一次进给运动,以便刨刀继续切削。
图1 牛头刨床二、设计要求电动机轴与曲柄轴2平行,刨刀刀刃点E与铰链点C的垂直距离为50mm,使用寿命10年,每日一班制工作,载荷有轻微冲击。
允许曲柄2转速偏差为土5%。
要求导杆机构的最大压力角应为最小值;凸轮机构的最大压力角应在许用值[α]之内,摆动从动件9的升、回程运动规律均为等加速、等减速运动。
执行构件的传动效率按0.95计算,系统有过载保护。
按小批量生产规模设计。
三、设计数据表1 设计数据四、设计内容及工作量(1)根据牛头刨床的工作原理,拟定2~3个其他形式的执行机构(连杆机构),并对这些机构进行分析对比。
(2)根据给定的数据确定机构的运动尺寸。
要求用图解法设计,并将设计结果和步骤写在设计说明书中。
(3)导杆机构的运动分析。
将导杆机构放在直角坐标系下,建立数学模型。
(4)凸轮机构设计。
根据给定的已知参数,确定凸轮的基本尺寸(基圆半径r o、机架l o2o9和滚子半径r r)和实际轮廓,并将运算结果写在说明书中(可选)。
(5)编写设计计算说明书。
机械原理课程设计——牛头刨床

机械能变化曲线:
飞轮设计:
V
A4
=
A2 A4 A2
速度图解法:
V1A+V12=V 2A VF+VFB=V 2B V2B=βV 2A Β为常数比
加速度图解分析: a4An+a4Ar+a24Ar+ak24A =a2A 大小 方向
a4b+aF4Br=aF a4A=βV 4B
进给凸轮机构设计
主体机构设计
牛头刨床主体机构
主体结构设计
设计要求
(1)刨刀工作行程要求速度比较平稳,空回行程时 刨刀快速退回,机构行程速比系数在1.4左右。 (2)刨刀行程H=300mm或H=150mm。曲柄转速、 切削力、许用传动角等见表1,每人选取其中一组数据。 (3)切削力P大小及变化规律如图1所示,在切削行 程的两端留出一点空程。具体数据如下:
主体机构
电机转速n(r/mi n)
切削力P(N)
75
许用传动角[γ]
H=150mm
4500N
45°
刨刀行程:H=150 速比系数:K=1.4
主体机构(方案一)
方案一: 摆动导杆机构与摇杆滑块机构组合机构
机构简图:
计算机构的自由度 F=3×5-2×7=1
主体机构(方案一)
机构尺寸的计算:
在满足压力角条件确定基圆半径,摆杆中心间的中心距。
• 推程许用压力角为[α]= 38°; • 回程许用压力角为[α’]= 65°; • 试凑法:对照摆杆长度为L,赋值基圆半径, 中心距a=90,r0=50;经试验符合要求
滚子半径rf:rf<ρ mi n -3(mm)及rf<0.8ρ mi n(mm) 方法1用图解法确定凸轮理论廓线上某点A的曲率半径R: 以A点位圆心,任选较小的半径r 作圆交于廓线上,在圆A 两边分别以理论廓线上的B、C为圆心,以同样的半径r 画圆,三个小圆分别交于E、F、H、M四个点处。过E、 F H、M O点 O点近似为凸轮廓线上A OA。并且曲率中心肯定在曲线过A 点的法线上。可以通 过法线与直线EF或HM的交点求曲率中心。
机械原理课程设计——牛头刨床
对于滑块中心D 点分析
Page 15
对摇杆进行分析
十二、飞轮转动惯量的计算
计算阻力距 确定等效力矩 确定最大盈亏功 估算飞轮转动惯量
Wmax 900 Wmax JF 2 2 2 213.7kg m2 (1 [ ]) π n1 [ ]
Page 16
Page
12
九、主机构尺度综合及运动特性评定
机构位置划分图
以 7号和 14 号位置 作运动分析
Page
13
十、电动机功率与型号的确定
电动机的选择 传动比分配与 减速机构设计 工作台进给方案
Page 14
确定电动机功率
总传动比 采用展开式二级圆柱齿轮减速器
工作台横向进给运动 工作台垂直进给运动
十一、主机构受力分析
Page
3
三、三维模型示意图
ቤተ መጻሕፍቲ ባይዱ三维模型示意图
Page 4
四、设计内容
课题:牛头刨床
1.对导杆机构进行运动分析 设 计 内 容 2.对导杆机构进行动态静力分析
3. 用UG模拟仿真运动校核机构运动分析和动态静 力分析结果
4. 确定电动机功率与型号 5. 减速装置的设计
Page 5
五、机构方案的初步确定
方案一
方案三
方案二
Page 6
五、机构方案的初步确定
功能要求
方 案 对 比
可动性
传递性能 动力性能 制造工艺及经济性
Page
7
六、对方案二的性能分析
(1)机械功能分析
杆1、2、3、6为曲柄摇杆,曲柄1为原动件,作 周期往复运动,使滑块同时周期往复运动,带动导 杆摆动,从而使得滑块4上下往复运动带动刨刀在 水平轨道上来回运动。 其中,刨刀向左为工作行程,速度平稳,运动行 程大;向右为工作回程,速度快,具有快速返回的 特性。
机械原理课程设计牛头刨床设计
机械原理课程设计牛头刨床设计机械原理课程设计牛头刨床设计随着科技不断的发展,机械英才的培养已受到各界的高度重视。
机械原理作为机械类专业的重点课程之一,对于学生的综合素质和能力的培养有着至关重要的作用。
为了提高学生的实践能力和专业技能,我在接受机械原理课程设计任务时,选择了一项具有挑战性和实用性的牛头刨床设计任务。
一、课程设计目标通过本次课程设计,主要目标如下:1.让学生了解牛头刨床的基本工作原理及其结构特点;2.提高学生的机械设计和制造能力;3.培养学生的合作精神和创新能力;4.促进学生的动手操作和实验能力的提高。
二、课程设计步骤1.课程设计前期准备在进行具体设计之前,我对牛头刨床的相关资料进行了大量的研究和归纳,学生们也需要认真学习刨床的相关知识。
同时,我还组织了互动的讲座和课堂讨论,以便于学生能够更加深入地理解牛头刨床的工作原理和结构特点。
2.机械设计在机械设计过程中,我们采取的是课堂授课和实际组装相结合的方法,进一步提高了学生的实践能力和设计能力。
课堂授课的内容主要包括刨床的设计思路、工作原理、传动方式等内容,通过实际操作和模拟实验,让学生从多个角度全面了解牛头刨床的结构和特点。
同时,我们还根据实际情况,对课程内容进行了针对性的调整和完善。
3.装配测试在机械设计完成后,我们对刨床进行了装配测试。
通过实际的组装和测试,提高了学生的实验能力和操作技能。
在测试过程中,我们严格按照安全操作规程进行操作,避免了误操作和安全事故的发生。
4.实践操作在实践操作中,我们对刨床的使用方法进行了详细的讲解和演示,让学生可以熟练地操作和使用刨床。
同时,我们组织了一些实践操作题目,让学生能够更好地理解和应用所学的知识。
三、收获通过本次课程设计,学生们都获得了很大的收获。
首先,他们对机械设计的基本原理和方法有了更深入的了解,同时也提高了他们的实践能力和实验能力。
其次,在团队协作方面,学生们也得到了很好的锻炼,提高了他们的合作精神和创新能力。
机械原理课程设计说明书牛头刨床
机械原理课程设计说明书牛头刨床一、设计题目牛头刨床的机械原理设计二、设计目的本次课程设计的目的是通过对牛头刨床的设计,深入理解机械原理中机构的运动和动力传递,掌握机械设计的基本方法和步骤,提高分析和解决实际工程问题的能力。
三、原始数据及设计要求1、刨削行程长度:____mm2、刨削速度:____m/min3、行程速比系数:____4、刨刀工作行程时的平均切削力:____N5、刨刀空行程时的平均阻力:____N设计要求:1、绘制机构运动简图。
2、对机构进行运动分析和动力分析。
3、确定电动机的功率和转速。
4、设计主要零部件的结构尺寸。
四、机构的选择和工作原理牛头刨床通常采用曲柄摇杆机构来实现刨刀的往复直线运动。
其工作原理是:电动机通过皮带传动将动力传递给飞轮,飞轮带动曲柄旋转,曲柄通过连杆带动摇杆摆动,摇杆与滑枕相连,从而使滑枕带动刨刀作往复直线运动。
五、运动分析1、位移分析设曲柄长度为 r,连杆长度为 l,摇杆长度为 a,偏距为 e。
以曲柄转角φ 为自变量,根据几何关系可以得到摇杆的摆角θ 和滑枕的位移 s 的表达式。
2、速度分析对位移方程求导,可以得到摇杆的角速度ω 和滑枕的速度 v 的表达式。
3、加速度分析对速度方程求导,可以得到摇杆的角加速度ε 和滑枕的加速度 a 的表达式。
六、动力分析1、工作阻力分析根据刨削工艺要求,确定刨刀在工作行程和空行程中的阻力变化规律。
2、惯性力分析计算各构件的质量和转动惯量,根据加速度分析结果计算惯性力。
3、平衡分析考虑惯性力和工作阻力,对机构进行平衡分析,以减小振动和冲击。
七、电动机的选择1、计算工作功率根据刨削力和刨削速度,计算刨削工作所需的功率。
2、考虑传动效率考虑皮带传动、齿轮传动等的效率,计算电动机所需的输出功率。
3、选择电动机根据所需功率和转速,选择合适的电动机型号。
八、主要零部件的设计1、曲柄和连杆的设计根据受力情况和运动要求,确定曲柄和连杆的材料、尺寸和结构形式。
牛头刨床机械原理课程设计2点和8

牛头刨床机械原理课程设计2点和8一、牛头刨床机械原理牛头刨床是一种用于木材加工的机械设备,主要用于修整木材的表面,使其平整光滑。
它的工作原理主要包括电机、传动系统、刨床刀具和工作台四个方面。
1. 电机:牛头刨床的电机是整个设备的动力来源,通过传动系统将电机的旋转动力传递给刨床刀具。
电机通常采用交流电动机,其输出功率与机床的加工能力有直接关系。
2. 传动系统:传动系统主要包括皮带传动和齿轮传动两种形式。
皮带传动通过皮带将电机的旋转动力传递给刨床刀具,具有传动效率高、噪音小等优点。
齿轮传动则采用齿轮轴传递动力,能够实现不同速度的转动。
3. 刨床刀具:刨床刀具是牛头刨床的工作部件,主要负责修整木材表面。
刨床刀具通常由多个刀片组成,通过快速旋转切削木材表面。
刀具的切削效果取决于刀具的材料、刀片的角度和刀具的切削速度。
4. 工作台:工作台是牛头刨床上的支撑平台,用于放置待加工的木材。
工作台通常具有可调节的高度和倾斜角度,以适应不同加工需求。
工作台的平整度和稳定性直接影响到加工效果。
二、牛头刨床的工作原理牛头刨床的工作原理是将待加工的木材放置在工作台上,通过传动系统将电机的旋转动力传递给刨床刀具,刀具高速旋转后切削木材表面,使其平整光滑。
将待加工的木材放置在工作台上,并根据需要调整工作台的高度和倾斜角度,使木材与刨床刀具的切削面保持一定的角度。
接下来,通过启动电机,电机的旋转动力通过传动系统传递给刨床刀具。
在传动过程中,如果采用皮带传动,则电机的旋转动力通过皮带传递给刨床刀具;如果采用齿轮传动,则电机的旋转动力通过齿轮轴传递给刨床刀具。
传动系统的设计使刨床刀具能够以一定的转速旋转。
刨床刀具高速旋转后,刀具的刀片与木材表面接触,通过刀片的切削作用将木材表面的不平整部分去除。
刀片的切削效果取决于刀具的材料、刀片的角度和刀具的切削速度。
通常情况下,刀具的材料选择硬度高、耐磨性好的材料,刀片的角度选择合适的切削角度,切削速度选择适当的转速。
机械原理牛头刨床课程设计
机械原理牛头刨床课程设计牛头刨床课程设计本课程的目的是使学生理解牛头刨床的原理,掌握正确的操作方法,安全而且高效的操作机床,为以后的实验、制作做准备。
一、总述牛头刨床,是用来进行切铣或者刨削加工的机床,主要用于打凹槽、打丁、刨槽、切断、挤出、切透等工作。
由于它精度高,准确性好,可以用来在机械加工行业中制作同样形状的零件,因此十分流行。
二、物理原理牛头刨床是一种摩擦式加工机床,其工作原理是将工件把其用牛头刨刃进行切削,产生摩擦动力发生滑动现象,从而实现对工件的加工加工非常有效率。
它特点体现在机床的构造,通常由一个垂直的刨花杆,一个活动的刨刃和一个垂直的工件夹紧装置组成。
三、机床结构牛头刨床,基本包括:主轴系统,分度齿轮系统,臂节系统,工件夹紧系统,床身系统和润滑系统等结构。
主轴系统由主轴、轴夹等组成,分度齿轮系统由主齿轮、主动齿轮、位移齿轮和分度齿轮组成,臂节系统由夹紧臂、轨道臂、杠杆调整臂、弹簧臂和臂轮组成,工件夹紧系统由夹紧框、夹紧杆、紧固螺栓及液压夹紧装置组成,润滑系统由油箱、油泵和油管组成。
四、机床操作1、在夹紧上就好紧固螺丝杆调整压力,根据工艺要求选择合适锥度的刨刃,按照顺序从大到小的刨;2、翻转夹件夹紧装置夹紧工件,使其与机床的定位位置一致;3、调整切削深度,即调整刨刃夹紧臂的位置,当刨刃完全进入工件时,开机进行加工;4、加工中要注意机床及工件的热量,使其保持在一定范围内;5、加工完成后,去除刨刃,清理刨花,进行刀具检查,并更换新的刀具。
五、课程内容1、讲解物理原理及机床结构;2、讨论加工工艺;3、实操演示加工技术;4、实验室测试本课程学习的技能;5、指导并完成机床制作机械部件的实际操作。
六、学习成果1、理解牛头刨床的原理,掌握机床的结构及各部件;2、熟悉牛头刨床内所有工艺加工流程及其步骤;3、掌握各种加工技术,能够正确熟练地操作机床;4、能够正确配置工艺,以满足加工的要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录一绪论 (1)1.牛头刨床机构工作原理 (1)2. 设计目的 (2)3. 设计任务 (3)二设计计算过程及说明 (3)1. 牛头刨床机构示意图及原始数据................................................................32.齿轮机构基本参数…….…..........................................…........... (4)3.连杆设计和运动分析 (5)4. 编写的计算源程序................................................................... .. (7)5. 电算的源程序和结果....................................................…............ (9)6. 设计图解法的图纸................................................................... (13)三设计小结 (13)1. 对设计结果的分析讨论 (13)四参考文献 (13)1. 列出主要参考资料........................................................…... (13)一. 绪论牛头刨床机构工作原理牛头刨床是一种靠刀具的往复直线运动及工作台的间歇运动来完成工件的平面切削加工的机床。
电动机经过减速传动装置(皮带和齿轮传动)带动执行机构(导杆机构)完成刨刀的往复运动和间歇移动。
牛头刨床的滑枕的直线运动不能说是偏心轮的作用。
牛头刨床的动力,经过减速后,在大齿轮的一面有一个固定短轴,短轴和齿轮中心有一定距离,装一个方形滑块。
在齿轮的下方,有一个轴承座,安装了一个长摇杆,齿轮上的方形滑块始终在长杆上滑动。
摇杆的上端,有滑枕的方形滑块,也是在杆上滑动,摇杆就使得滑枕前后运动。
这两个滑块都是能够转动的。
当大齿轮转动时,由滑块带动摇杆前后扇形摆动。
滑块位置在中心下面时,同等的转动圆心角,摇杆可以运动较大的角度,带动滑枕快速后退。
当大齿轮滑块在上方时,同样的圆心角,摇杆的运动就慢得多,这样滑枕就能够有较大的切削力。
调整大齿轮滑块的中心距,就能够调整滑枕行程。
滑枕是慢进快退,这样符合工作要求。
本实验以牛头刨床刀具运动的主传动机构为设计对象,通过对具有急回特性的机构的设计,掌握机构的选型、构型方法,利用机构构型的组合原理完成方案设计、比较,确定最终结果。
最后进行运动模拟。
牛头刨床主传动机构运动原理如下:当牛头刨床的主要工作机构滑枕右行时,刨刀进行切削,成为工作行程;此时要求刨头的速度较低且平稳,以提高切削质量;刨头左行时,不工作,称为回程,此时要求刨头的速度较高以提高生产率,这个关键特性称为“急回”特性。
用急回系数K 加以描述。
(180)(180)kθθ︒+=︒- 式中θ为摆杆两极限位置的夹角故要实现“急回”特性,就必须使机构的θ存在。
θ角越大,K 也越大,急回运动越明显。
并通过改变杆件的长度,改变其“急回”特性。
设计目的机械原理课程设计是机械原理课程的一个重要的实践性教学环节,其目的是: (1)进一步巩固和加深学生所学的理论知识;(2)培养学生运用理论知识独立解决有关本课程实际问题的能力,使学生对机械的分析和设计有一个较完整和系统的概念;(3)通过对具体问题的分析、计算、制图、技术资料的使用,电算程序的编制及计算机使用等各环节,培养学生独立分析问题和解决问题的工程技术能力。
设计任务本设计的任务主要包括二部分:(1)按机械的几何、运动等性能要求,进行低副机构的尺度综合和高副机构的轮廓线设计。
(2)对所设计的机构进行运动分析。
要求用解析法分析机构整个工作循环过程,并同时用图解法分析机构某几个瞬时位置的运动,对两种方法的分析结果作对比分析。
二. 设计计算过程及说明牛头刨床传动机构示意图及原始数据2.1.1 机构示意图:机构示意图:该机构由齿轮 1驱动齿轮2,在齿轮2上铰接有滑块,再由导杆机构实现刨刀滑枕的 切削运动。
原始数据:齿轮参数: 压力角20α= ,齿顶高系数*ha =1 ,顶隙系数*0.25c =齿轮转速n1(rpm )模数m (mm )齿数Z 1齿数Z 2距离L 1(mm ) 滑枕冲程H(mm )行程数比系数K距离L 2(mm ) 中心距O 2O 3220 6 15 58 185 470 355 350齿轮机构传动设计齿轮1不发生根切的最小变位系数x1min=()*min min ha Z Z Z -= ()1171517-= 齿轮2不发生根切的最小变位系数x2min=()*min min ha Z Z Z -=()1175817-=假设X1=,X2=。
因为 Z1<17 且X1>0,所以该齿轮不会发生根切。
又由 Z2 > Zmin=17,所以齿轮2也不会发生根切现象。
'[2(12)/12]tan inv x x z z inv ααα=++⨯+=2/⨯+=,由内插法求得:'α=23.565齿轮传动的中心距: 'a =cos cos 'a αα⋅=cos 20(12)2cos 23.565mz z +⋅= mm中心距变动系数: y=y 1=2z ∑('cos cos αα-1)=. 齿高变动系数: y ∆=x y ∑-==.齿顶圆压力角: 1a α= arc cos(1Db /1Da )=°1a α= arc cos(2Db /2Da )=26°重合度: ε=[ z 1°-tan20°)+ z 2(tan26°-tan20° )]/2π=分度圆直径:1D =1Z ⨯m=15⨯6 mm =90 mm ,2D =2Z ⨯m =58⨯6 =348 mm基圆直径: 1Db =1D ⨯ cos α=90⨯cos20°= mm2Db =2D ⨯ cos α=348⨯cos20°= mm齿顶圆直径: 1Da =2⨯'a -2D +2m(*ha -2x )=⨯+12⨯ = mm2Da =2⨯'a -1D +2m(*ha -1x )=⨯+12⨯ = mm齿根圆直径:Df1=m ⨯(z1-2*ha -2*c +21x )=6⨯(⨯+⨯)= mm Df2=m ⨯ (z2-2*ha -2*c +22x )=6⨯(⨯+⨯)= mm变位齿轮分度圆上齿厚:s=2tan 2mxm πα+=620.66tan 202π⨯+⨯⨯⨯= mm齿槽宽: e=2tan 2mxm πα-=620.66tan 202π⨯-⨯⨯⨯= mm小齿轮齿顶圆齿厚:1a s = 112(38.6220)a a r s r inv inv r⋅-⨯- = mm因为1a s > =,所以变位系数取值正确。
连杆机构设计和运动分析由k=知,10.618018041.541 2.6k k θ-=⨯=⨯=+。
由1(180)2αθ=-=69.23,且在此极限位置时223cos cos 69.23o A o o α==,求得α=又3cos 20.77350Ao ︒=,求得3A o =. 将机构置于图示坐标系中,各构件的矢量指向如图所示,其适量方程为12l l s +=将上式分别向x 轴和y 轴投影的方程组232323cos cos sin sin o A o A o o o A o A αβαβ⨯=⨯⎫⎬+⨯=⨯⎭其中只有3o A 和β两个未知数,故可以通过解方程求解。
将上方程组两边平方后相加222322322sin s o o o A o o o A α=++⨯⨯将上方程组第二式除以第一式得2322o sin tan cos o o A o A αβα+⨯=⨯ .将上方程组对时间求一阶导数得:33223223sin sin cos cos cos sin AB AB o A o A o A o A ωαωβνβωαωβνβ-=-+⎫⎪⎬-=+⎪⎭其中只有3ω和AB ν两个未知数,故可以通过解方程求解。
解得2233cos()o A o Aωαβω⨯⨯-=同理22sin()AB o A νωαβ=-⨯⨯-将第二个方程组对时间 t 求导并合并同类项,得222233333222233333cos cos sin 2sin cos sin sin cos 2cos sin AB AB AB AB o A o A o A a a o A o A o A a a γγωαωββνωββωαωββνωββ⎫-⨯=-⨯-⨯-+⎪⎬-⨯=-⨯+⨯++⎪⎭其中只有3a 和ABaγ两个未知数,解得:232232sin sin()AB ABo A ao Aγνωβωαβ+⨯⨯-=-= 2223sin()k AB a o A o Aωαβ+⨯⨯--式中k ABa= 32AB νω为科氏加速度。
同理可得AB aγ= 233o A ω⨯- 222cos()o A ωαβ⨯-计算机源程序及注解令23o o 的长度为L1, 2o A 的长度为L2,3o A 的长度为S1,滑块A 的位移为S ,速度为V ,加速度为a , 2o A 与X 轴的夹角为J1,3o A 与X 轴的夹角为J2,角速度为3ω,2o A 的角速度为2ω。
3o A 的角加速度为e3.源程序#include<> #include<> #define PI int i;float n1=220,m=6,z1=15,z2=58,Lo2o3=350,Lo2a=; float j1,j2,tanj2,S,Lo2a,Lo3a,w1,w2,w3,V,e3,akab,a; PRINT(float j1) { FILE *fp;fp=fopen("d:\\","a");tanj2=(Lo2o3+Lo2a*sin(j1))/(Lo2a*cos(j1));j2=atan(tanj2); /*j2为杆3o A 与水平线夹角,j1为杆2o A 逆时针转过角度*/S=sqrt((Lo2o3)*(Lo2o3)+(Lo2a)*(Lo2a)+2*Lo2a*Lo2o3*sin(j1)); w1=2*PI*n1/(60); w2=w1*z1/(z2);w3=Lo2a*w2*cos(j1-j2)/(S); /*摇杆3o A 的角速度*/V=-w2*Lo2a*sin(j1-j2); /*滑块A 相对于杆3o A 的速度*/e3=-(akab+Lo2a*w2*w2*sin(j1-j2))/(S); /*杆3o A 的角加速度*/akab=2*V*w3; /*科氏加速度*/a=(S*w3*w3)-(Lo2a*w2*w2*cos(j1-j2)); /*滑块A 相对于杆3o A 的加速度*/printf("%2d%%%%\n",i,(j1/(PI))*180,S,V,a);fprintf(fp,"%2d%%%%\n",i,(j1/(PI))*180,S,V,a);fclose(fp);}main(){ FILE *fp;if((fp=fopen("d:\\","w+"))==NULL)exit(0);printf("NO:\t j1\t\t S\t\t V\t\t a\n\n");for(j1=0,i=1;j1<=2*PI;j1=j1+((5*(PI))/180),i++){ PRINT(j1);if(i%20==0)system("pause");}fclose(fp);system("pause");}运行结果及图形角度位移速度加速度5101520303540455055606570758085900 95100105110115120125130135140145150155160165170175180697 185190195200205210215220225230235240245255 260 265 270 275 280 285 290 295 300 305 310 315 320 325 330 335 b 345 350 355 360用图解法分析机构的三个瞬时位置的运动,作出相应机构位置图、速度和加速度图,并将图解法的结果与解析法计算结果相比较。