Mastercam构建空间间歇转位凸轮的方法
模具旋转凸轮(RotateCAM)机构设计要点~

模具旋转凸轮(RotateCAM)机构设计要点~减小模具外形尺寸,精简模具机构,对企业降低成本,提高利润有着重要的意义。
传统子母斜楔机构占用空间大,运动复杂,调试困难,为了解决这些问题,行业内创新使用了一种新的斜楔机构:旋转凸轮。
与传统子母斜楔相比具有:结构紧凑,受力好,精度高,利于零件定位等优点,因此在车身模具开发中具有广泛的使用前景。
随着汽车工业的不断发展,车型变得复杂而多样,对汽车冲压件的质量要求也越来越高,模具结构变得越来越复杂,模具制造周期不断缩短,模具质量也随之不断提升。
汽车覆盖件是组成汽车车身的关键零部件,质量高、精度严,覆盖件模具的开发能力很大程度上决定着企业的技术水平。
因此,一些新技术、新结构、新工艺的应用在某些特殊的模具结构中会起到简化结构、方便制造等诸多优点。
在20世纪末,行业内开始出现一种全新的斜楔机构:旋转凸轮机构。
模具的旋转凸轮机构是在过去侧修、侧整子母斜楔基础上,通过技术创新而采取的一种新的斜楔机构。
该斜楔机构在解决汽车覆盖件产品冲压负角翻边问题中,将翻边凸模对产品负角区域的直线避让转化为旋转避让,原则上采用斜楔加工的成形类工序都可以采用旋转凸轮机构来代替,这对减小模具外形尺寸、降低成本和提高利润具有重大的意义。
旋转凸轮分为转轴式和外置式两种,本文主要介绍转轴式旋转凸轮在汽车覆盖件模具中的应用。
工作原理模具旋转凸轮机构能够在汽车覆盖件产品冲压负角翻边时,将需要侧向加工的负角区域的凸模按照一定直径做成圆柱形,使其能够绕一个轴心旋转,且旋转过程不会与制件发生干涉,实现凸模对产品负角区域的直线避让转化为旋转避让。
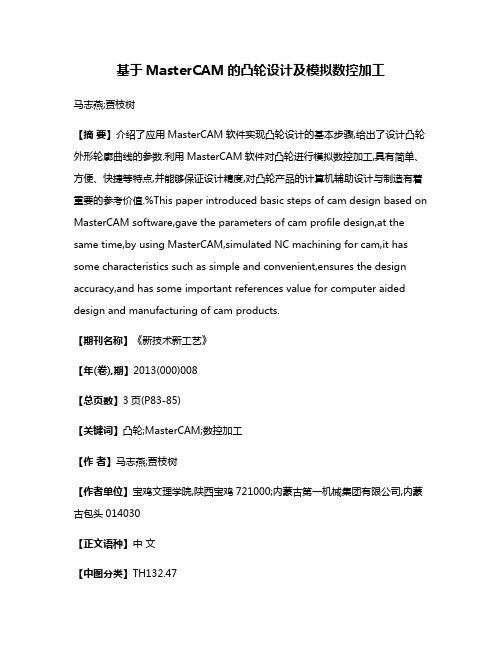
旋转凸轮的设计轴心的选取过旋转区域各断面线的最远点分别做垂线,则几条垂线在制件外会有一个开放的交集,凸轮的旋转中心应设定在这个区域内,避免凸轮在旋转过程中与制件发生干涉,如图1中阴影部分所示。
图1 轴心的选取直径的设定直径的大小与轴心位置密切相关,同时也与加工部位的形状和轮廓有关,合理的凸轮直径至少应满足a≥25mm,b≥50mm,c≥70mm,如图2所示。
基于MasterCAM的凸轮设计及模拟数控加工
基于MasterCAM的凸轮设计及模拟数控加工马志燕;贾枝树【摘要】介绍了应用MasterCAM软件实现凸轮设计的基本步骤,给出了设计凸轮外形轮廓曲线的参数.利用MasterCAM软件对凸轮进行模拟数控加工,具有简单、方便、快捷等特点,并能够保证设计精度,对凸轮产品的计算机辅助设计与制造有着重要的参考价值.%This paper introduced basic steps of cam design based on MasterCAM software,gave the parameters of cam profile design,at the same time,by using MasterCAM,simulated NC machining for cam,it has some characteristics such as simple and convenient,ensures the design accuracy,and has some important references value for computer aided design and manufacturing of cam products.【期刊名称】《新技术新工艺》【年(卷),期】2013(000)008【总页数】3页(P83-85)【关键词】凸轮;MasterCAM;数控加工【作者】马志燕;贾枝树【作者单位】宝鸡文理学院,陕西宝鸡721000;内蒙古第一机械集团有限公司,内蒙古包头014030【正文语种】中文【中图分类】TH132.47凸轮机构是机械自动化生产设备中的关键部件,而凸轮的工作性能直接取决于凸轮轮廓,适当的凸轮轮廓可使从动件实现各种复杂的运动要求[1]。
传统的设计和加工方法比较复杂,并且对于不同的应用受到很大的限制;因此,合理利用CAD/CAE/CAM对凸轮进行设计和模拟,并应用数控机床加工凸轮是很有必要的。
凸轮设计步骤
所属标签:产品外观设计根据使用要求确定了凸轮机构的类型、基本参数以及从动件运动规律后,即可进行凸轮轮廓曲线的设计。
设计方法有几何法和解析法,两者所依据的设计原理基本相同。
几何法简便、直观,但作图误差较大,难以获得凸轮轮廓曲线上各点的精确坐标,所以按几何法所得轮廓数据加工的凸轮只能应用于低速或不重要的场合。
对于高速凸轮或精确度要求较高的凸轮,必须建立凸轮理论轮廓曲线、实际轮廓曲线以及加工刀具中心轨迹的坐标方程,并精确地计算出凸轮轮廓曲线或刀具运动轨迹上各点的坐标值,以适合在数控机床上加工。
圆柱凸轮的廓线虽属空间曲线,但由于圆柱面可展成平面,所以也可以借用平面盘形凸轮轮廓曲线的设计方法设计圆柱凸轮的展开轮廓。
下面时间财富网的小编分别介绍用几何法和解析法设计凸轮轮廓曲线的原理和步骤。
1 几何法反转法设计原理:以尖底偏置直动从动件盘形凸轮机构为例:凸轮机构工作时,凸轮和从动件都在运动。
为了在图纸上画出凸轮轮廓曲线,应当使凸轮与图纸平面相对静止,为此,可采用如下的反转法:使整个机构以角速度(-w)绕O转动,其结果是从动件与凸轮的相对运动并不改变,但凸轮固定不动,机架和从动件一方面以角速度(-w)绕O转动,同时从动件又以原有运动规律相对机架往复运动。
根据这种关系,不难求出一系列从动件尖底的位置。
由于尖底始终与凸轮轮廓接触,所以反转后尖底的运动轨迹就是凸轮轮廓曲线。
1). 直动从动件盘形凸轮机构尖底偏置直动从动件盘形凸轮机构:已知从动件位移线图,凸轮以等角速w顺时针回转,其基圆半径为r0,从动件导路偏距为e,要求绘出此凸轮的轮廓曲线。
运用反转法绘制尖底直动从动件盘形凸轮机构凸轮轮廓曲线的方法和步骤如下:1) 以r0为半径作基圆,以e为半径作偏距圆,点K为从动件导路线与偏距圆的切点,导路线与基圆的交点B0(C0)便是从动件尖底的初始位置。
2) 将位移线图s-f的推程运动角和回程运动角分别作若干等分(图中各为四等分)。
基于mastercam的平面凸轮 NC加工
基于mastercam的平面凸轮 NC加工作者:李江平来源:《科技视界》2015年第01期【摘要】本文介绍了在数控铣加工中所用的CAD/CAM编程工具软件Mastercam中的Fplot工具使用,以Mastercam中自带的Chooks中的eqn文件为例介绍了凸轮方程曲线的绘制,以及平面凸轮的数控铣加工工艺。
【关键词】Mastercam;Fplot;Chooks;Eqn;NC;平面凸轮0 前言凸轮机构广泛应用于纺织机械、印刷机械、食品机械、内燃机、自动化仪表以及各种轻工机械中。
凸轮机构之所以得到了如此广泛的应用,是因为它兼有传动、导向及控制机构的各种功能,可以驱动从动件实现复杂的运动规律。
以前受到设计和加工条件的限制,往往采用作图法设计凸轮轮廓和划线加工凸轮的方法。
随着机械不断朝着高速、精密、自动化方向发展,对凸轮机构的转速和精度要求也不断提高,因此利用计算机辅助设计和应用数控机床加工凸轮是很有必要的。
建立专用的凸轮CAD/ CAM软件,在生产实践中会改善加工精度,降低制造成本和缩短产品开发周期,本人在进行数控铣加工编程中,采用了Mastercam 中的MILL模块进行凸轮数控铣床编程,就是使用MILL模块中的Fplot工采用Fplot绘制出平面凸轮曲线,改善加工精度,降低制造成本和缩短产品开发周期.1 Fplot介绍本文以Mastercam9.0中文版为例介绍如何使用Mastercam中Fplot程序绘制复杂曲线与曲面,Fplot是一个函数绘图程序。
它利用方程和选择建立相应的几何图形(包括点,线,样条曲线,曲面曲线,参数曲面或NURBS曲面)。
该方程采用普通的代数符号。
2 eqn文件介绍我们可以用普通文本编辑软件如记事本或写字板打开扩展名为eqn的文件,首先进入mastercam安装文件夹如D:\mastercam9\ Chooks目录,可以看见几个扩展名为eqn的文件,有CANDY、CHIP 、DRAIN、ELLIPSD、fplot、INVOL、SINE等几个eqn文件。
自动车床凸轮设计详细教程..

自动车床主要靠凸轮来控制加工过程,能否设计出一套好的凸轮,是体现自动车床师傅的技术高低的一个标准。
凸轮设计计算的资料不多,在此,我将一些基本的凸轮计算方法送给大家。
凸轮是由一组或多组螺旋线组成的,这是一种端面螺旋线,又称阿基米德螺线。
其形成的主要原理是:由A点作等速旋转运动,同时又使A点沿半径作等速移动,形成了一条复合运动轨迹的端面螺线。
这就是等速凸轮的曲线。
凸轮的计算有几个专用名称:1、上升曲线——凸轮上升的起点到最高点的弧线称为上升曲线2、下降曲线——凸轮下降的最高点到最低点的弧线称为下降曲线3、升角——从凸轮的上升起点到最高点的角度,即上升曲线的角度。
我们定个代号为φ。
4、降角——从凸轮的最高点到最低点的角度,即下降曲线的角度。
代号为φ1。
5、升距——凸轮上升曲线的最大半径与最小半径之差。
我们给定代号为h,单位是毫米。
6、降距——凸轮下降曲线的最大半径与最小半径之差。
代号为h1。
7、导程——即凸轮的曲线导程,就是假定凸轮曲线的升角(或降角)为360°时凸轮的升距(或降距)。
代号为L,单位是毫米。
8、常数——是凸轮计算的一个常数,它是通过计算得来的。
代号为K。
凸轮的升角与降角是给定的数值,根据加工零件尺寸计算得来的。
凸轮的常数等于凸轮的升距除以凸轮的升角,即K=h/φ。
由此得h=Kφ。
凸轮的导程等于360°乘以常数,即L=360°K。
由此得L=360°h/φ。
举个例子:一个凸轮曲线的升距为10毫米,升角为180°,求凸轮的曲线导程。
(见下图) 解:L=360°h/φ=360°×10÷180°=20毫米升角(或降角)是360°的凸轮,其升距(或降距)即等于导程。
这只是一般的凸轮基本计算方法,比较简单,而自动车床上的凸轮,有些比较简单,有些则比较复杂。
在实际运用中,许多人只是靠经验来设计,用手工制作,不需要计算,而要用机床加工凸轮,特别是用数控机床加工凸轮,却是需要先计算出凸轮的导程,才能进行电脑程序设计。
Mastercam9.1第6章 沟槽凸轮的设计与

Ø 25
图6-4
图6-5
6.3.4 用极坐标方式(已知圆心)绘制圆或圆弧 绘制半径为R47的圆弧,可采用 极坐标 方式画圆,方法如下: (1) 单击 返回 → 极坐标 → 已知圆心 命令,过程如图6-6所示。 (2) 在系统提示区出现提示:极坐标画圆弧:请指定语圆心,捕捉原 点为圆心。 (3) 在系统提示区出现提示:请输入半径,输入47 ,回车。 (4) 在系统提示区出现提示:请输入起始角度,输入90 ,回车。 (5) 在系统提示区出现提示:请输入终止角度,输入270 ,回车。 (6) 绘制好R47的圆弧,如图6-7所示。 (7) 同样办法可画好R32的圆弧,下面介绍另一种画法。
6.3.6 绘制切弧 绘制R97的圆弧,可采用 切弧 方式画圆弧,方法如下: (1) 单击 返回 → 切弧 → 切两物体 命令,过程如图6-9所示。 起始点
终止点
图6-8
图6-9
6.3.6 绘制切弧 (2)在系统提示区出现提示:绘制圆弧,切两物体:请输入半径,输入97 , 回车。 ( 3 )在系统提示区出现提示:请选取图素,圆角半径 =97,选择 R47 的圆 弧。 (4)在系统提示区出现提示:倒圆角:请选取另一个图素,选择R32的圆 弧。 (5)图中会出现多个相切的圆弧,在系统提示区出现提示:请选择所需 的圆角,选择一个符合需要的圆弧,如图6-10所示。 (6) 同样的方法,可绘制R267的圆弧,如图6-11所示。 选择该 圆弧
图6-1
6.2 绘图思路
绘制圆弧
修剪
串连补正 尺寸标注 图6-2 绘图思路
6.3 沟槽凸轮的建模
6.3.1 绘制中心线 (1) 将图形视角设为俯视图(T),当前层别设为 1 , 命名为“中 心线”,点选 图素属性 按钮,将线型设为中心线 。 (2) 绘制水平中心线。 单击 绘图 → 直线 → 水平线 命令,在Y坐标为 0 的位置,绘 制好水平中心线。 (3) 绘制垂直中心线。 单击 主菜单 → 绘图 → 直线 → 垂直线 命令,在X坐标为0及30 的位置绘制两垂直线。 6.3.2 指定圆心与直径绘制圆 绘制Ø25和Ø12的圆,可采用 点直径圆 方式画圆,方法如下: (1)将当前层别设为 2, 命名为“线框图”,点选 图素属性 按钮 ,将线型设为实线 。 (2)单击 主菜单 → 绘图 → 圆弧 → 点直径圆 命令,过程如图63所示。
基于mastercam的偏置直动滚子从动件盘形凸轮轮廓解析法设计与数控加工

DOI:10.3969/j.issn.2095-509X.2015.07.015基于MasterCAM的偏置直动滚子从动件盘形凸轮轮廓解析法设计与数控加工贺建群(江门职业技术学院机电技术系,广东江门 529090)摘要:介绍了偏置直动滚子从动件盘形凸轮轮廓解析法设计与数控加工,首先根据运动规律建立凸轮理论轮廓曲线的参数方程,然后利用MasterCAM绘制其理论轮廓曲线,再偏置一个滚子半径得到盘形凸轮的实际轮廓曲线,最后利用外形铣削刀具路径加工所需的盘形凸轮。
关键词:MasterCAM;盘形凸轮;解析法设计;数控加工中图分类号:TH112.2 文献标志码:A 文章编号:2095-509X(2015)07-0062-041 解析法设计凸轮轮廓偏置直动滚子从动件盘形凸轮如图1所示[1],已知从动件运动规律s=f(φ),凸轮基圆半径rb,滚子半径rT,从动件偏置在凸轮右侧,凸轮以等角速度ω逆时针转动。
取凸轮转动中心O为原点,建立直角坐标系Oxy。
图1 偏置直动滚子从动件盘形凸轮 根据反转法,当凸轮顺时针转过角φ时,从动件的滚子中心由B0点反转到B点,此时理论轮廓线上B点的坐标方程为:x=DN+CD=(s0+s)sinφ+ecosφy=BN-MN=(s0+s)cosφ-esinφ(1)式中:s为对应凸轮转角φ的从动件位移;s0=r2b-e2;e为偏距。
凸轮实际轮廓线与理论轮廓线是等距曲线(间距为滚子半径rT),经过推导可得到与理论轮廓线上B点对应的实际轮廓线上的B′点的直角坐标方程:x′=x+rTdy/d矱(dx/d矱)2+(dy/d矱)2y′=y-yTdx/d矱(dx/d矱)2+(dy/d矱)2(2)式中:矱为推程角。
如果凸轮作顺时针转动,则φ以负值代入;如果从动件在凸轮的左侧,则e以负值代入。
2 盘形凸轮轮廓设计实例已知盘形凸轮基圆半径rb=40mm,从动件行程h=40mm,滚子半径rT=10mm,偏心距e=20mm。
广工数控课设凸轮轮廓线数控加工程序设计

引言随着计算机的应用日益广泛,在凸轮机构的设计中采用计算机辅助设计的方法已日益普遍。
它不仅使设计工作量大为减少,设计速度大为提高,而且可大大提高凸轮廓线的设计精度,从而更好的满足设计要求。
㈠凸轮的分类:⒈凸轮按形状分类可以分为:⑴盘状凸轮(plate cam):具有变化半径盘状体,从动在垂直于凸轮的平面内作移动或摆动。
⑵楔形移动凸轮(wedge cam):将盘形凸轮一个扇形部分绕在圆锥上---锥形凸轮,即在圆锥体上开有曲线槽,从动件运动与圆柱凸轮相同。
⑶柱状凸轮(cylindrical cam):移动凸轮绕在圆柱体上→圆柱凸轮。
实际上是在圆柱体上开有曲线槽端面上做成曲面形状,从动件与在凸轮轴同一平面或平行平面内移动,摆动。
⒉按从动件与凸轮的接触形式分类可以分为:⑴尖底从动件(a knife edge follower):点接触,易磨损,传力不大。
2.滚子从动件(a roller follower):线接触:磨损小,传力大⑵平底从动件(a flat-face follower):平面接触,接触处易形成油膜,高速。
⒊按从动件的运动形式分类可以分为:⑴往复移动凸轮机构(reciprocating)⑵摆动凸轮机构(oscillating)⒋按锁合方法分类可以分为:⑴力封闭(弹簧、重力)⑵形封闭(槽形、等宽矩形、等径、共轭)㈡凸轮设计的现状传统的盘形凸轮设计主要有图解法和解析法。
图解法直观简单,但是手工作图选取的等分数有限、精度差。
以此为基础的手工画线加工表面精度都比较低。
对于从动件运动规律复杂,精度要求高的凸轮,手工操作难以胜任。
随着计算机技术的日益发展,用解析法使绘制从动件运动规律复杂,精度要求高的凸轮成为可能,并得到日益广泛的应用。
本人这次尝试在解析法的基础上,借助VB6.0 编制了一个简化的对心滚子从动件盘形凸轮设计软件。
一设计任务:平面凸轮的数控加工程序的编制设有凸轮如图1所示。
凸轮转角t与从动件位移s的关系即凸轮轮廓的展成平面图如图2所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
z’= z0-(x’- x0)⒁
采用以上类似的方法,同样可得:
x = x’-⒂
z = z’+(x-x’)⒃
这时的
y = r * cos(- r1)
= 40.0 * cos(0.785398- r1)⒄
且(x,z)点与(x’,z’)点之间的距离为:
r12 = r–
参照Mastercam建立如图1所示坐标系。由工作条件,随着凸轮1以匀速t转动,转位盘2按正弦加速度运动规律转过r1角度。根据机械原理,正弦加速度运动方程为:
r1 =φ[-sin (t)]
=[-sin (t)]
=[3t -sin (3t)]
= 0.25 [3t -sin (3t)]⑴
其中:0≤t≤= 2.094395(弧度)
r2 = 40.0 * sin (0.785398 + r1) - 35.0
r3 = r2 / 38.0
r4 = 38.0 * cos (t + r3)把原主段曲线之x赋予r4
r5 = 38.0 * sin (t + r3)把原主段曲线之z赋予r5
r6 = r4 / r5 r6 =
r7 = 40.0 * (sin (0.785398 + r1) - sin (0.785398 - r1))
r12 = 38.0 - sqrt (1444.0 - r7^2)
r13 = sqrt (1 + (1 / r6)^2)
x = r10 - r12 / r13
y = 40.0 * cos (3.926991 - r1)
z = r11 + (x - r10) / r6
创建的图形参见图3。
图6
凸轮的休止角tS= 240°=弧度,我们可以把凸轮主段轨迹曲线的首与滚子5进入凸轮的运动轨迹曲线的尾、主段轨迹曲线的尾与滚子4离开凸轮轨迹曲线的首两两用相应的圆弧R38连接,这样就得到了完整的凸轮滚子几何中心轮廓曲线。参见图6。
r5 = 38.0 * sin (t + r3)
r6 = r4 / r5
r7 = 40.0 * (sin (0.785398 + r1) - sin (3.926991 - r1))
r8 = sqrt (1 + r6^2)
r9 = r7 / r8
r10 = r4 + r9
r11 = r5 - r6 * (r10 - r4)
step_var1 = t
step_size1 = 0.05
lower_limit1 = 0
upper_limit1 = 0.65上限= 0.65
geometry = lines
angles = radians
origin = 0, 0, 0
r1 = 0.25 * (3 * t - sin(3 * t))
图3
三、构建凸轮滚子引出引入曲线图形
由图1可知,滚子3在按图示方向运动过程中,滚子4在逐渐离开凸轮,而滚子5在逐渐进入凸轮。
滚子离开及进入凸轮相对应的转角较小,为了简化计算,我们忽略了由于r3的存在而使数学模型产生的微小变化。
我们先来研究滚子4的运动轨迹,参见图4。
设滚子3某一时刻运动到3’(x0,z0)处,这时滚子4到达4’(x’,z’)点,相应的,凸轮上的点是(x,z)。
r13 = sqrt (1 + (1 / r6)^2) r13 =
x = r10 - r12 / r13 x = x’-
y = 40.0 * cos (0.785398 - r1) y = r * cos(- r1)
z = r11 + (x - r10) / r6 z = z’+( x–x’)
编辑好后,保存文件,用与主段相同的方法,创建滚子4的运动轨迹(引出)图形,参见图3。
一、工件条件及凸轮主段轨迹分析
空间间歇转位凸轮示意图如图1所示,半径R =38mm的圆柱凸轮1以匀速t转动,运动角t0= 120°,在半径r =40mm位置上均布4个滚子的转位盘2间歇地转过φ= 90°,休止角tS= 240°;凸轮1与转位盘2安装偏心距e =35mm;采用无冲击的正弦加速度运动规律,试绘制凸轮轮廓。
geometry = lines
angles = radians
origin = 0, 0, 0
r1 = 0.25 * (3 * t - sin(3 * t))
r2 = 40.0 * sin (0.785398 + r1) - 35.0
r3 = r2 / 38.0
r4 = 38.0 * cos (t + r3)
r8 = sqrt (1 + r6^2) r8 =
r9 = r7 / r8 r9 =
r10 = r4 + r9 r10 = x’= x0+
r11 = r5 - r6 * (r10 - r4) r11 = z’= z0–(x’– x0)
r12 = 38.0 - sqrt (1444.0 - r7^2)
r3 =⑷
根据相对运动原理,假设凸轮不动,转位盘2绕凸轮中心轴反方向转动,相当于其转过t + r3的角度,参见图2,既有:
x0= R * cos ( t + r3)
= 38.0 * cos ( t + r3)⑸
z0= R * sin ( t + r3)
= 38.0 * sin ( t + r3)⑹
同时参考图1,可得:
(考虑到Mastercam软件的识读,采用符号r1、r2……等表示各参数;为了计算方便,角度选用弧度为单位。)
这时,滚子3(暂先研究其中心的轨迹。下同)转到3’位置,其沿Z轴方向产生了位移。设此时到XOY平面的距离为r2,则有:
r2 = r * sin (a+ r1) - e
= 40 * sin(+ r1) -35
y = 40.0 * cos (2.356194 - r1)
z = 38.0 * sin (t + r3)
编辑好后,保存该文本文件。
创建图形:Creale — Nextmenu — Add-ins — Fplot — Get eqn —选择刚保存的文本文件—打开— Plot it,可在Mastercam界面上画出凸轮主段轨迹曲线,参见图3(中心线及双点画线圆为预先画好的辅助线)。
Mastercam构建空间间歇转位凸轮的方法
摘要:常规构建空间间歇转位凸轮图形较为复杂,本文采用Mastercam的二次开发功能编辑该三维曲线参数方程,简化了构建过程,并为按实际需要对凸轮廓线(面)进行必要的转换与修整提供了方便。
关键词:Mastercam;参数方程;图形
随着机械行业CAD/CAM软件的日趋完善、数控机床的大力发展,常规机械设计及制造变得愈来愈方便。数控机床加工零件,需要有可识读的指令,或通过手工输入、或通过有关CAD/CAM软件进行图形编辑自动形成指令代码输入。复杂些的零件可根据给出的参数方程计算出大量点的坐标输入相应的CAD/CAM软件系统形成图形和指令代码。一些CAD/CAM软件的二次开发功能,如Mastercam的C-Hooks程式编辑程序文本文件精确作图,使得诸如空间间歇转位凸轮这样较复杂的三维图形可以较快构建,为形成加工指令代码、体现数控机床的高性能、高精度和高效率打下良好基础。
= 40.0 * cos (3.926991 - r1)⒇
其余与滚子4离开凸轮的各参数相同。参见图5。
通过测算,滚子5在凸轮转过约1.45弧度开始进入凸轮。
可编辑出如下程序文本文件:
step_var1 = t
step_size1 = 0.05
lower_limit1 = 1.45
upper_limit1 = 2.094395
说明
step_var1 = t步数变量= t
step_size1 = 0.05步数大小= 0.05(取值越小精度越高)
lower_limit1 = 0下限(变量初始值)= 0
upper_limit1 = 2.094395上限(变量终止值)= 2.094395
geometry = lines图形=线
angles = radians角度=弧度
origin = 0, 0, 0原点= 0,0,0
r1 = 0.25 * (3 * t - sin(3 * t))赋予各参数值(下同)
r2 = 40.0 * sin (0.785398 + r1) - 35.0
r3 = r2 / 38.0
x = 38.0 * cos (t + r3)赋予轨迹图形上各坐标点数值(下同)
对于滚子5进入凸轮的运动轨迹,下列参数发生了一些变化:
r7 = r * sin(a+ r1) - r * sin(π+a- r1)
= r * [sin(+ r1) - sin(-r1)]
= 40.0 * [sin (0.785398 + r1) - sin (3.926991 - r1)⒆
Hale Waihona Puke y = r * cos(-r1)y0= r * cos (π-- r1)
= r * cos (- r1)
= 40.0* cos ( 2.356194-r1)⑺
以上⑸、⑹、⑺三式就是主段轨迹曲线方程。
二、编辑C-Hooks文本文件并构建凸轮主段轨迹曲线图形
打开Mastercam V9(Mill)软件,按以下方法操作:
……File — Edit — Other —在“Specify File Name to Read”对话框中选择Chooks文件夹—选eqn后缀的任何一文件—打开—在“Programmer’s File Editor”中按“New”按钮—在Untitled文本文件中编辑如下: