UG导入ADAMS的制作过程
ug导入adams方法
jaity 2003-7-25 10:46回复:【求助】请问:怎样将UG建模结果导入AdAMS?File---Export---Parasolid注意:不能导出“Curve"chenxue781213 2004-4-16 23:13回复:【求助】请问:怎样将UG建模结果导入AdAMS?请问UG的哪个版本转化效果好?chenxue781213 2004-4-19 08:32回复:【求助】请问:怎样将UG建模结果导入AdAMS?Elvis你用的是UG的哪个版本?你对比了各个版本不同,导出效果的区别了吗?hongfeng20 2004-4-20 21:41回复:【求助】请问:怎样将UG建模结果导入AdAMS?CATIA的文件怎么导入ADAMS。
还有啊,CATIA的文件怎么导入ANSYS啊。
呵呵,多了啊。
wine 2004-5-20 12:51回复:【求助】请问:怎样将UG建模结果导入AdAMS?haomondgao 2004-5-23 08:52回复:【求助】请问:怎样将UG建模结果导入AdAMS?我导出文件时遇到一个错误error create adams model这是什么回事flanker-forever 2004-6-16 22:56回复:【求助】请问:怎样将UG建模结果导入AdAMS?补充一下:在UG里不要加接触,如果是这样,导入ADAMS后,你所定义的接触会用一个用户自定义函数来表示,很麻烦。
推荐导入ADAMS后直接在ADAMS里加接触,现在AMAMS2003的接触运算要比UG的快。
快乐无尽头2004-6-21 16:12回复:【求助】请问:怎样将UG建模结果导入AdAMS?我也碰到了mondgao遇到的问题,怎么回事呀?请赐教ccz 2004-6-22 09:30回复:【求助】请问:怎样将UG建模结果导入AdAMS?我觉的用PARASOLIDE导出非常简单易行,载荷还是到ADAMS里面加比较好,在UG的装配里面直接EXPORT PARASOLIDE 就可以,输出版本我用的是11~15的,很实用。
ug模型导入adamsUG运动仿真模型如何导入到ADAMS
ug模型导入adams UG运动仿真模型如何导入到ADAMS导读:就爱阅读网友为您分享以下“UG运动仿真模型如何导入到ADAMS”资讯,希望对您有所帮助,感谢您对的支持!UG运动仿真导出到动力学软件ADAMS一、UG NX/Motion(注意:以前的版本必须将时间改为2009年以前)1、在UG NX/Motion中建立三维模型机构,进入仿真。
首先双击【运动导航器】上的仿真项目motion_1选择【求解器】/ADAMS,2、在【运动导航器】上右击solution_1,选择/【求解】,用ADAMS 对该模型重新计算,计算完毕后在【运动导航器】上右击motion_1,选择【导出】/【ADAMS输入】。
在。
在弹出的对话框中,【几何体格式】选择Parasolid,以motion_将文件保存起来。
3、打开保存的文件夹,可见共有三个文件:motion_,motion__txt,motion_。
将motion_的扩展名.anl改为.adm。
二、导入到ADAMS1、运行ADAMS,选中Import a file单选按钮,在file type中选择adam类型的文件,在file to read中右击browse选择motion_文件,单击OK,将UG中放真的运动副添加到ADAMS。
2、在ADAMS中选择菜单File/Import,在file type 下拉列表中选择Parasolid类型文件,在file to read中右击browse选择motion__txt文件,在Model Name中右击Model/Gusses/motion_1,单击OK,将UG中建立的装配体模型一如到ADAMS.注意:这里的Model Name不能取其他的名字。
百度搜索“就爱阅读”,专业资料,生活学习,尽在就爱阅读网,您的在线图书馆。
基于UG和ADAMS的运动学联合仿真分析
: ! _ ! : . . . . . . . . 一
修
改
模 型 导入到 A D A M S
————]1———~
. . ..... ..... ....
: ! . . ! : . . . . . . 一
绪
^ n ^ l I s j 穗加 复杂 妁 柬 、 驱 动 ,力
块包 括 A DAMS , V i e w和 AD AMS / S o l v e r 。
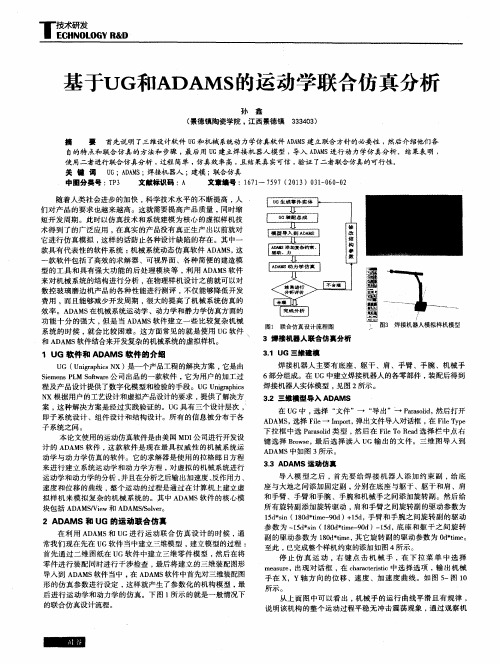
焊接 机 器 人 主要 有 底 座 、躯 干 、肩 、手 臂 、手腕 、机械 手
6 部分 组成 。在 U G中建立 焊接机 器 人 的各零 部件 , 装 配后 得到
一 实体 模 ~ 焊接 机器人 型, 见图 2 所示。
中 圈分 类号 : T P 3 文献标 识码 : A 文章 编号 : 1 6 7 1 —7 5 9 7( 2 0 1 3 )0 3 1 — 0 6 0 — 0 2
u G生 成 零 件 实 体
£ I G装 配 总 成 — ——— Tr——一
. .... . . ... ..
二二][
构 参 数
A D ^ 懈 动 力 学 仿 真
, , 嬉 粜 谶 行
\
勋
图3 焊 接机器人模拟样机模型
ห้องสมุดไป่ตู้
l宪成分析
图1 联合仿真设计流程图
3 焊接 机器人 联 合仿 真分析
3 . 1 UG三 维建 模
1 U G 软件 和 A D A MS软件 的介绍
U G( U n i g r a p h i c s N X) 是一 个产 品工程 的解决 方案 , 它是 由 S i e m e n s P L M S o f t w a r e 公 司 出 品的一 款软 件 , 它 为 用户 的 加工 过 程及 产 品 设计 提供 了数 字 化模 型 和检验 的 手段 。U G U n i g r a p h i c s N X根 据 用户 的 工艺设计 和 虚拟 产 品设 计 的要 求 , 提供 了解决 方 案 , 这 种 解决 方 案是 经 过实 践 验证 的。U G具 有 三个 设计 层 次 , 、 即 子 系统 设 计 、组 件设 计 和 结构 设 计。所 有 的信 息被 分 布于 各 子 系统 之 间 。 本 论 文使 用 的运 动仿 真 软件是 由美 国 MD I 公 司进 行开 发设 计的A D A MS 软件 , 这 款 软 件 是现 在 最具 权 威 性 的机 械 系统 运 动 学 与 动力 学 仿 真 的软 件 。它 的求 解器 是使 用 的拉格 郎 日 方 程 来 进 行 建立 系统 运 动学 和 动力 学 方程 , 对 虚 拟 的机 械 系统 进行 运 动学 和动力 学 的分析 , 并 且在 分析 之后输 出加 速 度 、 反 作用力 、 速 度 和 位 移 的 曲线 , 整个 运 动 的过 程是 通 过 在计 算 机 上建 立虚 拟样 机 来 模 拟 复 杂 的机 械 系统 的。其 中 A D A M S软件 的核 心模
ADAMS与ug、SolidWorks的数据交换实践
现代制造工程 2005 (10)
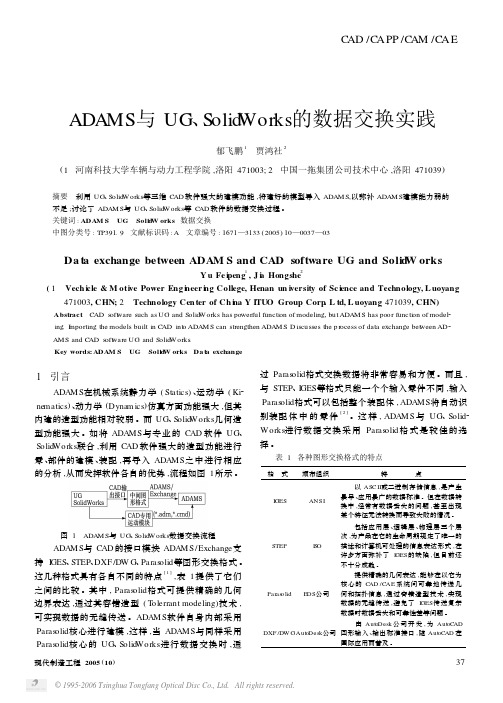
过 Parasolid格式交换数据将非常容易和方便 。而且 , 与 STEP、IGES等格式只能一个个输入零件不同 ,输入 Parasolid格式可以包括整个装配体 , ADAM S将自动识 别装配 体 中 的 零 件 [ 2 ] 。这 样 , ADAM S 与 UG、Solid2 Works进行数据交换采用 Parasolid 格式是较佳的选 择。
现代制造工程200510adams与ugsolidworks进行数据交换的第二种方法是利用ugsolidworks自身的运动学动力学仿真模块输出adams格式31cmd31adm文件这样可以保持建立好的零件几何形状质量惯性矩约束等信息输出到adams中不过这些模块需要额外授权或购买
CAD /CAPP /CAM /CAE
图 2 某车悬架模型
数据转换的具体步骤如下 : 1)在 UG中建模 、装配 。 2)将 UG建好的模型输出为 Parasolid格式 。选择 File→Export→Parasolid. . . ,此时弹出对话框 ,在 UG中 选择相应实体模型进行输出即可 。因为 UG、ADAM S 目前只支持英文路径 ,所以应将文件输出在英文名路 径下 。 3) ADAM S导入 UG输出的 Parasolid 格式文件 。 选择 File → Import. . . , 弹出文件导入对话框 , 在 File Type下拉框中选 Parasolid类型 ,然后选择读入 UG输 出的文件 。 212 通过 UG /Motion 模块输出 ADAM S格式文件进 行数据交换 作为 UG的运动分析模块 , UG /Motion 采用 AD2 AM S解算器作为运算核心 , 能进行比较复杂的运动 学 、动力学分析 。如果用户要进行更高级的运动学 、动 力学分析 ,就需要将模型输出到 ADAM S中 , 在 UG / Motion中建立好的连杆 、运动副 、运动驱动等元素能够 直接转入到 ADAM S中 。 图 3所示为一曲柄连杆机构 ,在 UG /Motion中已 加入移动副 、转动副等元素并施加了运动驱动 ,然后输 出到 ADAM S中 。由图 3 可见 ,通过 UG /Motion,可以 将零件几何模型 、约束 、运动驱动等完整地输入到 AD2
请问:怎样将UG建模结果导入AdAMS?
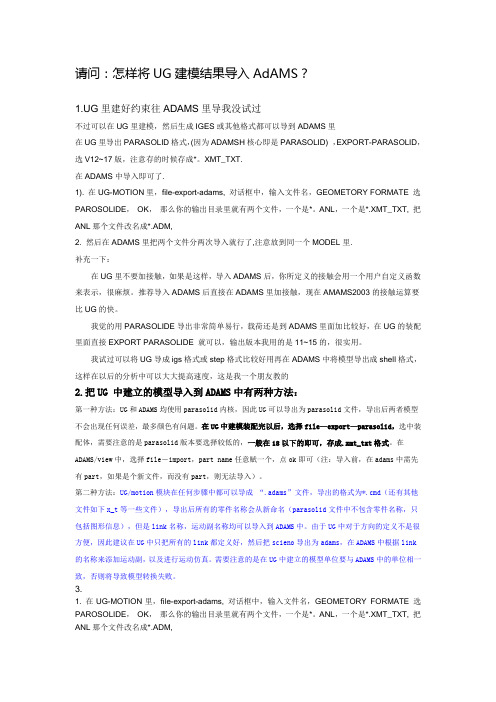
请问:怎样将UG建模结果导入AdAMS?1.UG里建好约束往ADAMS里导我没试过不过可以在UG里建模,然后生成IGES或其他格式都可以导到ADAMS里在UG里导出PARASOLID格式,(因为ADAMSH核心即是PARASOLID) ,EXPORT-PARASOLID,选V12~17版,注意存的时候存成*。
XMT_TXT.在ADAMS中导入即可了.1). 在UG-MOTION里,file-export-adams, 对话框中,输入文件名,GEOMETORY FORMATE 选PAROSOLIDE,OK,那么你的输出目录里就有两个文件,一个是*。
ANL,一个是*.XMT_TXT, 把ANL那个文件改名成*.ADM,2. 然后在ADAMS里把两个文件分两次导入就行了,注意放到同一个MODEL里.补充一下:在UG里不要加接触,如果是这样,导入ADAMS后,你所定义的接触会用一个用户自定义函数来表示,很麻烦。
推荐导入ADAMS后直接在ADAMS里加接触,现在AMAMS2003的接触运算要比UG的快。
我觉的用PARASOLIDE导出非常简单易行,载荷还是到ADAMS里面加比较好,在UG的装配里面直接EXPORT PARASOLIDE 就可以,输出版本我用的是11~15的,很实用。
我试过可以将UG导成igs格式或step格式比较好用再在ADAMS中将模型导出成shell格式,这样在以后的分析中可以大大提高速度,这是我一个朋友教的2.把UG 中建立的模型导入到ADAMS中有两种方法:第一种方法:UG和ADAMS均使用parasolid内核,因此UG可以导出为parasolid文件,导出后两者模型不会出现任何误差,最多颜色有问题。
在UG中建模装配完以后,选择file—export—parasolid,选中装配体,需要注意的是parasolid版本要选择较低的,一般在18以下的即可,存成.xmt_txt格式。
在ADAMS/view中,选择file-import,part name任意赋一个,点ok即可(注:导入前,在adams中需先有part,如果是个新文件,而没有part,则无法导入)。
UG零件导入ADAMS的方法
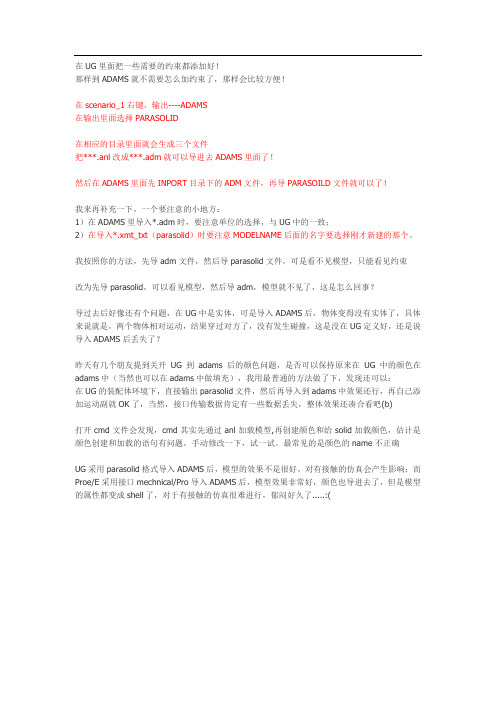
在UG里面把一些需要的约束都添加好!那样到ADAMS就不需要怎么加约束了,那样会比较方便!在scenario_1右键,输出----ADAMS在输出里面选择PARASOLID在相应的目录里面就会生成三个文件把***.anl改成***.adm就可以导进去ADAMS里面了!然后在ADAMS里面先INPORT目录下的ADM文件,再导PARASOILD文件就可以了!我来再补充一下,一个要注意的小地方:1)在ADAMS里导入*.adm时,要注意单位的选择,与UG中的一致;2)在导入*.xmt_txt(parasolid)时要注意MODELNAME后面的名字要选择刚才新建的那个。
我按照你的方法,先导adm文件,然后导parasolid文件,可是看不见模型,只能看见约束改为先导parasolid,可以看见模型,然后导adm,模型就不见了,这是怎么回事?导过去后好像还有个问题,在UG中是实体,可是导入ADAMS后,物体变得没有实体了,具体来说就是,两个物体相对运动,结果穿过对方了,没有发生碰撞,这是没在UG定义好,还是说导入ADAMS后丢失了?昨天有几个朋友提到关开UG到adams后的颜色问题,是否可以保持原来在UG中的颜色在adams中(当然也可以在adams中做填充),我用最普通的方法做了下,发现还可以:在UG的装配体环境下,直接输出parasolid文件,然后再导入到adams中效果还行,再自己添加运动副就OK了,当然,接口传输数据肯定有一些数据丢失,整体效果还凑合看吧(b)打开cmd文件会发现,cmd其实先通过anl加载模型,再创建颜色和给solid加载颜色,估计是颜色创建和加载的语句有问题,手动修改一下,试一试。
最常见的是颜色的name不正确UG采用parasolid格式导入ADAMS后,模型的效果不是很好,对有接触的仿真会产生影响;而Proe/E采用接口mechnical/Pro导入ADAMS后,模型效果非常好,颜色也导进去了,但是模型的属性都变成shell了,对于有接触的仿真很难进行,郁闷好久了.....:(古希腊哲学大师亚里士多德说:人有两种,一种即“吃饭是为了活着”,一种是“活着是为了吃饭”.一个人之所以伟大,首先是因为他有超于常人的心。
基于UG和ADAMS的运动学联合仿真分析

基于UG和ADAMS的运动学联合仿真分析作者:孙鑫来源:《硅谷》2013年第05期摘要首先说明了三维设计软件UG和机械系统动力学仿真软件ADAMS建立联合方针的必要性,然后介绍他们各自的特点和联合仿真的方法和步骤,最后用UG建立焊接机器人模型,导入ADAMS进行动力学仿真分析。
结果表明,使用二者进行联合仿真分析,过程简单,仿真效率高,且结果真实可信,验证了二者联合仿真的可行性。
关键词 UG;ADAMS;焊接机器人;建模;联合仿真中图分类号:TP3 文献标识码:A 文章编号:1671—7597(2013)031-060-02随着人类社会进步的加快,科学技术水平的不断提高,人们对产品的要求也越来越高。
这就需要提高产品质量,同时缩短开发周期。
此时以仿真技术和系统建模为核心的虚拟样机技术得到了的广泛应用,在真实的产品没有真正生产出以前就对它进行仿真模拟,这样的话防止各种设计缺陷的存在。
其中一款具有代表性的软件系统:机械系统动态仿真软件ADAMS,这一款软件包括了高效的求解器、可视界面、各种简便的建造模型的工具和具有强大功能的后处理模块等,利用ADAMS软件来对机械系统的结构进行分析,在物理样机设计之前就可以对数控玻璃磨边机产品的各种性能进行测评,不仅能够降低开发费用,而且能够减少开发周期,很大的提高了机械系统仿真的效率。
ADAMS在机械系统运动学、动力学和静力学仿真方面的功能十分的强大,但是当ADAMS软件建立一些比较复杂机械系统的时候,就会比较困难。
这方面常见的就是使用UG软件和ADAMS软件结合来开发复杂的机械系统的虚拟样机。
1 UG软件和ADAMS软件的介绍UG(Unigraphics NX)是一个产品工程的解决方案,它是由Siemens PLM Software公司出品的一款软件,它为用户的加工过程及产品设计提供了数字化模型和检验的手段。
UG Unigraphics NX根据用户的工艺设计和虚拟产品设计的要求,提供了解决方案,这种解决方案是经过实践验证的。
基于UG建模的辛普森行星齿轮在ADAMS中运动仿真的实现

基于UG建模的辛普森行星齿轮在ADAMS中运动仿真的实现摘要利用UG参数化建模功能,建立了辛普森行星齿轮机构的三维模型,并成功将其装配体导入到专业运动仿真软件Adams中。
根据其真实的工作状态,通过添加约束、驱动,实现了对辛普森行星齿轮机构在各档位运动状态的仿真。
在后处理模块中,可以清晰的判定各个构件在不同档位时的转动方向及速度大小,更加直观的加深了对汽车自动变速器换挡机理的认识与了解。
关键词 UG建模辛普森行星机构 ADAMS仿真The Motion Simulation of Simpson Planetary Gear based on UG in ADAMS Abstract Take advantage of the parametric modeling in UG, the simpson planetary gear modeling have been made, then been imported successfully into the ADAMS. In the ADAMS, it was exerted constraint and driver according to the actual working status, and have achieved the motion simulation of the simpson planetary gear working in the different gears. In the post-processing module, it could be clearly determined what direction of rotation is and how much the angular velocity is when the various components working in different gears. It contributed to have a deeper and intuitive understanding about the gear shift principle of the automatic gearbox.Key words UG modeling Simpson planetary gear ADAMS motion simulation引言自动变速器在汽车中是仅次于发动机的关键部件,是机—电—液一体化的典型产品。