点阵常数的精确测量
X射线衍射之晶面标定及精确测定点阵常数
点阵常数的精确测定41130269 材料1109 顾诚【实验目的】了解点阵常数测定时的误差来源,消除误差的实验方法及数据处理方法。
【实验原理】对立方晶系通常采用下式计算测定点阵常数的误差:θθ∆∙-=∆cot a a通常所指精确测定点阵常数,是指使测定点阵常数的精确度达到小数点第四位(0A ),即00001.0A a +=∆。
无论采用粉末照相方法还是衍射仪法测定点阵常数,都是通过测量衍射线的θ2角的位置,根据布拉格公式及晶面间距与点阵常数的关系公式来求出点阵常数值。
测定θ2角的误差包括偶然误差和系统误差两大类。
在精确测定点阵常数时,一方面应尽可能采用精密的实验技术,使这两类误差减至最小限度,另一方面,又根据这些误差所具有的特点和规律,采用合理的数据处理方法,使它们减至最小。
【实验方法】 衍射仪法用衍射仪精确测定点阵常数的精度可达到15万分之一。
由于衍射仪法与德拜法的测试方法与记录手段不同,故误差来源和消除误差的实验方法不相同。
误差来源1) X 射线管焦点偏离测角计180度的位置:()R x /2-=∆θ2) 试样表面偏离测角计轴:()R P /cos 22θθ-=∆3) 试样表面偏离聚焦圆:()θθcot 622a -=∆4) 试样吸收系数过小:()R μθθ2/2sin 2-=∆5) 入射束轴向发散:()θδθδθ2sin 36cot 2221+-=∆6) 因其他实验条件(如试样制备、温度波动、测角计传动、扫描速度以及时间常数等因数)所导致的误差。
消除误差的实验方法1. 精细调试测角计:不同厂家生产的衍射仪的调试细节各不相同。
2. 合理选择时间常数和扫描速度。
3. 消除测角计传动误差:用调试手段很难消除此种误差,但可通过将θ2角测量结果与精确点阵常数已知的标样的θ2角测量结果进行比较来校正。
比较时要选择θ2相近的线条逐一比较,以防因θ2角差值过大造成新的误差。
4. 利用双向扫描消除焦点不在180度处及接收狭缝不在零位的误差:采用双向扫描和θ2cos 外推法进行处理。
点阵常数的精确测量
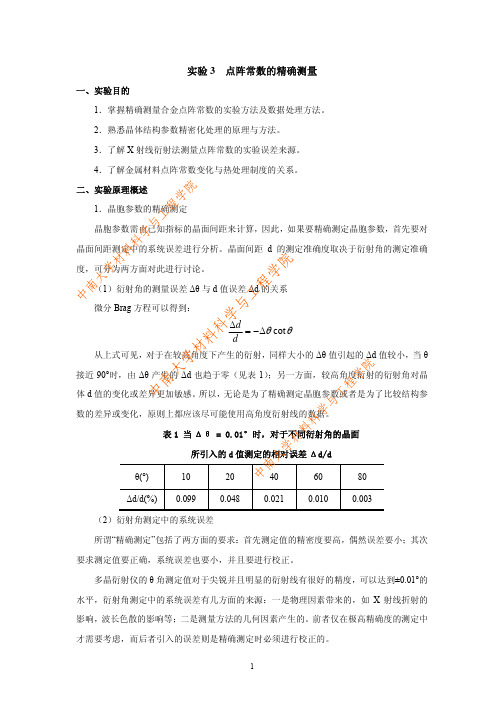
所引入的 d 值测定的南相大对学误差 Δd/d
θ(°)
10
20
中 40
60
80
∆d/d(%) 0.099
0.048
0.021
0.010
0.003
(2)衍射角测定中的系统误差
所谓“精确测定”包括了两方面的要求:首先测定值的精密度要高,偶然误差要小;其次
要求测定值要正确,系统误差也要小,并且要进行校正。
院 晶面间距测材定料中科的系统误差进行分析。晶面间距 d 的测定准确度取决于衍射角的测定准确
度,可分学为两方面对此进行讨论。
学 大 工程 中南(1)衍射角的测量误差 ∆θ 与 d 值误差 ∆d 的关系
与 微分 Brag 方程可以得到: 科学∆d = −∆θ cotθ
料d
材 从上式可见,对于在较高角度下产生的衍射,同样大小的 ∆θ 值引起的 ∆d 值较小,当 θ
1
(3)精确测定晶胞参数的方法
为了精确测定晶胞参数,必须得到精确的衍射角数据,衍射角测量的系统误差很复杂,
通常用下述的两种方法进行处理。
①用标准物质进行校正
现在已经有许多可以作为“标准”的物质,其晶胞参数都已经被十分精确地测定过。因此
可以将这些物质掺入被测样品中制成试片,应用它已知的精确衍射角数据和测量得到的实验
假定实验测量的系统误差已经为零那么从实验的任一晶面间距中南大学材料科学与工程学院数据求得的同一个晶胞参数值在实验测量误差范围内应该是相同的但实际上每一个计算得到的晶胞参数值里都包含了由所使用的测量值系统误差所引入的误差例如若被测物质属立方晶系其角测定十分准确那么依据任何一个数据所计算的a0值都应在测量误差范围之内而与值无关然而实际上a0的计算值是与所依据的值相关的大多数引起误差的因素在趋向90时其影响都趋向于零因此可以通过解析或作图的方法外推求出接近90时的数据从而利用它计算得到晶胞参数值
第六章点阵常数的精确测定

标准样校正法
用实验方法来消除误差 选一些比较稳定的物质:如Ag、Si、SiO2等, 其点阵参数已经高一级的方法精确测定过。
特点: (1)实验和计算简单,有实际应用价值 (2)精确度十分依赖于标准物本身数据的精
确度
ad
可见,a的相对
误差与 cos2
成正比。
德拜法的误差校正方法
精密实验技术方法 数学处理方法
精密实验技术方法
采用不对称装片法,可以有效地消除相机半径 误差及底片伸缩误差;
试样高精度地对准相机中心,消除试样偏心误 差;
粉末柱直径小于0.2mm,减小吸收误差; 使用114.6mm的相机,用比长仪测量; 使用无应力试样; 恒温,±0.1 °C 测量精度可达 1/200,000。
因此试样偏心误差为:
c
( S S
)
(2x sin 4R
2 )
x sin cos
R
试样吸收误差
试样吸收所引起的线条位置的偏移,其 影响作用与试样偏心误差一致,故可包 含于上式中。
以上因素引起的总误差为:
S、R、C、A
( S S
R ) R
x R
对布拉格公式微分,可得:
2d sin n 2d cos 2sin d d ctg d d ctg
d 对于立方晶系:d a
da
可见,如果测量误差Δθ一定,则采用 高角度的衍射线,可以使所测得的点阵 常数的相对误差减小。因此在实际工作 中尽可能选取高角度的衍射线。
(一)点阵常数的测定
X射线测定点阵常数是一种间接方法,它直接测量的是某 一衍射线条对应的θ角,然后通过晶面间距公式、布拉 格公式计算出点阵常数。以立方晶系为例,其晶面间距
6 点阵常数的精确测定

C
C
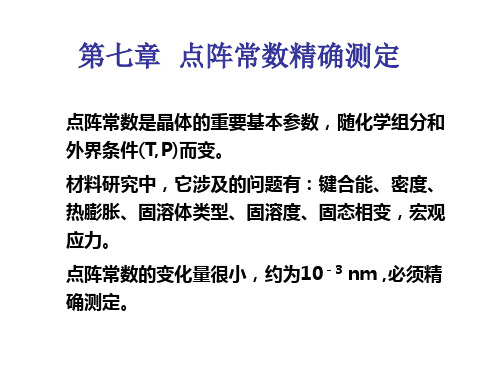
图 6-3 试样吸收误差产生 的示意图
衍射,衍射线束的中心线由试样中心 C 发出,位置为 P。可见由于吸收产生的衍射线位移 PP与试样在水平方向上位移 CC=x 产生的衍射线位移是相同的。所以可将吸收误差合并
68
燕大老牛提供
到试样偏心误差中。 综合上述四种误差,可以得到角的总误差为:
燕大老牛提供
6 点阵常数的精确测定
点阵常数是晶体物质的重要参量,它随物质的化学成分和外界条件(温度和压力)而发 生变化。晶体物质的键合能、密度、热膨胀、固溶体类型、固溶度、固态相变、宏观应力等, 都与点阵常数的变化密切相关。 所以, 可通过点阵常数的变化揭示上述问题的物理本质及变 化规律。但在这些过程中,点阵常数的变化一般都是很小的(约为 10-4 量级) ,因此,必须 对点阵常数进行精确的测定。
在背反射区, 接近 90, 很小, sin , cos 1 。则:
d sin S R x S R x [( ) sin sin ] ( ) sin2 d 1 S R R S R R
在同一张底片上,括号中各项均属恒量,可用常数 K 表示,则有:
(
S R x ) sin cos S R R
6-7)
由于 900 , , sin cos , cos sin ,可将方程(6-2)写成:
d cos sin sin S R x cot [( ) sin cos ] d sin cos cos S R R
-
的数值,故不考虑它的误差,所以,点阵常数的测量精度主要取决于 sin 值。由布拉格方 程可知 sin ,若为常数,则两边取微分: 2d
第7章-点阵常数的测定
曲线外推:通常引入人为主观因素。 直线外推:效果好。
a a0 a a0 bf
若用a0表示点阵常数精确值,则实测的点阵常数a为:
d d
c
os2
(
A s in 2Βιβλιοθήκη Bs in C
D
sin2
4E
sin2 2
)
d d
ctg2 (A B sin
C sin2
D
E
cos2 )
n (HKL)
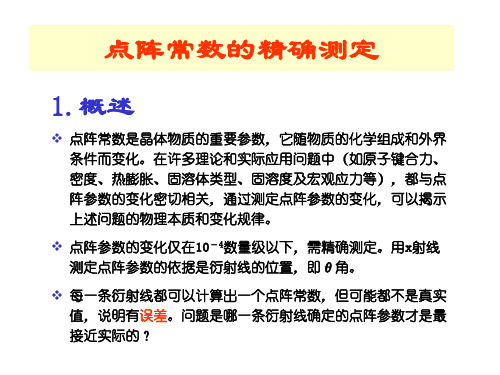
0.010
0.005 0.0010~
0.000 30 40 50 60 70 80 90
点阵参数测量精度与θ和Δθ的关系
当一定时,采用高角的衍射 线,面间距(或者立方系物质的 点阵参数)误差将减小。
因此,选择角度尽可能高的线条 进行测量。
7.2 误差来源
7.2.1 德拜照相法:
相机半径、 底片伸缩、 试样偏心、 试样吸收
7.1 基本原理
2d sin
a d
H 2 K 2 L2
a
H 2 K 2 L2
2 s in
d
cos 2sin2
d d
a a
cos 2sin2
ctg
2 s in
a
H 2 K 2 L2
2 s in
X射线测定点阵常数是一种 间接方法,它直接测量的是 某一衍射线条对应的θ角,然 后通过晶面间距公式、布拉 格公式计算出点阵常数。
第七章 点阵常数精确测定
点阵常数是晶体的重要基本参数,随化学组分和 外界条件(T,P)而变。 材料研究中,它涉及的问题有:键合能、密度、 热膨胀、固溶体类型、固溶度、固态相变,宏观 应力。 点阵常数的变化量很小,约为10-3 nm ,必须精 确测定。
点阵常数与宏观应力测定
计算结果:M=0.3464, b=98.6930
(4)轴向发散误差:
衍射仪法外推函数:
(1)透明度是主要时,选用cos2:
d A B D 4E cos2 ( 2 C 2 2 ) d sin sin sin sin 2
(2)平板与水平发散是主要时,选用ctg2:
d E ctg 2 ( A B sin C sin 2 D ) 2 d cos
第二类(微观应力)-区域晶面间 距变化为 d,衍射线宽化; 第三类(超微观应力)-原子偏离 平衡位置(若干个原子范围内), 衍射线强度
2. 宏观应力测定的基本原理
样品表面应力与应变状态为平面应力状态:
0, y,z 0, x,z 0
如图所示:表面法线方向为一个主方向,其余两个主方向在 表 面上。 X-ray探测深度有限,简化为平面应力状态。 所以,X-ray探测的是物体表层应力。
4.衍射仪法
衍射仪法不能利用外推函数消除的误差: (1)测角仪机械零点( 2 =0的位置); (2) 2角的2 : 1驱动匹配误差; (3) 计数测量系统滞后(步进法); (4)折射修正;
(5)温度校正。
利用外推函数可消除的误差: (1)平板试样误差: (2)试样表面离轴误差: (3)试样透明度误差:
4.宏观应力测定中的几个问题
峰位的确定:
半高宽法;
抛物线法 应力常数K的确定:
第7章 点阵常数的精确测定
• 衍射线条指标化的方法很多,有计算法、 图解法、尺算法等。但它们的基本原理都 是一致的。下面就最基本的计算法说明指 标化的方法、原理和过程。
• 7-1-1晶胞参数已知时衍射线的指标化
• 我们把布拉格方程改写为:
1 sin ( ) 2 2 d
2 2
将晶面间距的公式代入上式,即可得 出各晶系中衍射角θ与晶胞参数及衍射指 数之间的关系。 • 例如,立方晶系:
7-1-2 晶胞参数未知时衍射线的 指标化
• 由前面推导的关系式可知,衍射指数和晶胞参 数二者是相互依赖的, • 当晶胞参数未知时,由于不同晶系之晶胞参数 的未知个数多少不等,通常仅对粉末法中的立 方晶系晶体的指标化才是肯定的,对中级晶族 一般是有可能的,而低级晶族则一般是较困难 的。
674
0.61043
5.359
6.331
16.077(16)
18.993(19)
400
331
106.57
122.83
0.64259
0.77107
6.664
7.997
19.993(20)
23.991(24)
420
422
137.32
0.86757
8.998
26.994(27)
第七章 点阵常数的精确测定
主要内容
• • • • §7-1 §7-2 §7-3 §7-4 粉末衍射线条的指标化 点阵常数测量中误差的来源 点阵常数精确测定的方法 点阵常数精确测定的应用
• 本章叙述多晶试样点阵常数精确测定的基 本方法。 • 着重介绍粉末衍射线条指数的标定、点阵 常数测量误差的来源及消除误差的方法。
衍射谱的指标化
• 衍射谱标定就是要从衍射谱判断出试样 所属的晶系、点阵胞类型、各衍射面指 数并计算出点阵参数
第十二章 点阵常数的精确测定
测量误差分为偶然误差和系统误差两类。
偶然误差没有一定的规律,永远不可能完 全消除,只能通过反复测量将其降到最低限度。 系统误差由实验条件确定,一般以某种 函数关系作规律性变化,因此可以选用适当的 数学处理方法将其消除。
8.2
德拜—谢乐法的系统误差
系统误差的主要来源:
(只有背反射区的衍射线适合作点阵常数的 精确测定,误差讨论以背反射区为基准)
(1)相机半径误差
(2)底片伸缩误差 (3)试样偏心误差 (4)试样吸收误差
2
综合上述因素,可得:
2
8.3
衍射仪法的主要误差
1) 不能用利用外推函数消除的误差 2) 可利用外推函数消除(部分消除)的误差
不能用利用外推函数消除的误差
• 测角仪零点(即0°2角位置)的调整误差; • 2/ 角的2:1驱动匹配误差; • 计数测量系统滞后误差等。
2)
外推函数cos2只适 用于 ≥ 60°的衍 射线,其中至少一条 >80°的衍射线。这 种外推函数可获得 2×10-5精度的点阵 常数。
3)对衍射仪法,不能用一个统一的外推函数 消除全部系统误差。只能采用逐项处理或总 体处理两种办法消除系统误差。实际处理时, 只能以某种函数为主选取外推函数。
利用外推函数可以消除(或部分消除)的误差
• 平板试样的误差; • 试样表面的离轴误差; • 试样透明度误差等。
8.4
1) 原理
外推法消除系统误差
无论德拜—谢乐法还是衍射仪法,系统误差都与衍射 角呈一定的函数关系。 外推法消除系统误差,就是将由若干条衍射线 测得的点阵常数,按一定的外推函数外推到=90°, 此时系统误差为零,即得到精确点阵常数。 实测点阵常数一般可表示为:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
所引入的 d 值测定的南相大对学误差 Δd/d
θ(°)
10
20
中 40
60
80
∆d/d(%) 0.099
0.048
0.021
0.010
0.003
(2)衍射角测定中的系统误差
所谓“精确测定”包括了两方面的要求:首先测定值的精密度要高,偶然误差要小;其次
要求测定值要正确,系统误差也要小,并且要进行校正。
实验 3 点阵常数的精确测量
一、实验目的
1.掌握精确测量合金点阵常数的实验方法及数据处理方法。
2.熟悉晶体结构参数精密化处理的原理与方法。
3.了解 X 射线衍射法测量点阵常数的实验误差来源。
4.了解金属材料点阵常数变化与热处理制度的关系。
二、实验原理概述
院
1.晶胞参数的精确工测程定学
晶胞参数需由学已与知指标的晶面间距来计算,因此,如果要精确测定晶胞参数,首先要对
院 晶面间距测材定料中科的系统误差进行分析。晶面间距 d 的测定准确度取决于衍射角的测定准确
度,可分学为两方面对此进行讨论。
学 大 工程 中南(1)衍射角的测量误差 ∆θ 与 d 值误差 ∆d 的关系
与 微分 Brag 方程可以得到: 科学∆d = −∆θ cotθ
料d
材 从上式可见,对于在较高角度下产生的衍射,同样大小的 ∆θ 值引起的 ∆d 值较小,当 θ
南大学 接近 90°时,由 ∆θ 产生的 ∆d 也趋于零(见表 1);另一方面,较高角度程衍学射院的衍射角对晶
中 体
d
值的变化或差异更加敏感。所以,无论是为了精确测定晶胞参数或工者是为了比较结构参 与
数的差异或变化,原则表上1都当应该Δ尽θ可=能0使.0用1°高时角,度对衍于射不线材同的料衍数科射据学角。的晶面
中南
式中 wi ——权重因子, wi =1/ Yi ;
Yoi , Yci ——步进扫描第 i 步的实测强度和计算强度。
使 M 值最小的过程也就是结构精修的过程。通过结构精修的方法精确计算点阵常数比 前两种方法可靠性大,操作简单,是近年来发展的新方法。 三、实验步骤与方法
1.采用步进扫描方式,测量金属粉末的点阵常数,实验条件为扫描范围 2θ=80-140 °, 步进宽度 0.01 °,步进时间 1s,晶体单色器,衍射束石墨单色器,接收狭缝 0.15°,发散狭 缝 0.30°。
1
(3)精确测定晶胞参数的方法
为了精确测定晶胞参数,必须得到精确的衍射角数据,衍射角测量的系统误差很复杂,
通常用下述的两种方法进行处理。
①用标准物质进行校正
现在已经有许多可以作为“标准”的物质,其晶胞参数都已经被十分精确地测定过。因此
可以将这些物质掺入被测样品中制成试片,应用它已知的精确衍 θ 角测定值对于尖锐并且明显的衍射线有很好的精度,可以达到±0.01°的
水平,衍射角测定中的系统误差有几方面的来源:一是物理因素带来的,如 X 射线折射的
影响,波长色散的影响等;二是测量方法的几何因素产生的。前者仅在极高精确度的测定中
才需要考虑,而后者引入的误差则是精确测定时必须进行校正的。
学 大 工程 到中的南晶胞参数值里都包含了由所使用的θ测量值系统误差所引入的误差(例如,若被测物质 学与 属立方晶系,其θ角测定十分准确,那么依据任何一个θ数据所计算的a0值都应在测量误差范
料科 围之内,而与θ值无关,然而实际上a0的计算值是与所依据的θ值相关的),大多数引起误差
材 的因素在θ趋向 90°时其影响都趋向于零,因此可以通过解析或作图的方法外推求出接近 90°
大学 时的θ数据,从而利用它计算得到晶胞参数值。 ③结构精修 中南
学院 工程
Retiveld 方法通过理论计算得到的强度数据以一定的峰形函学数与与实验数据拟合,通过不
断调整峰形参数和结构参数的值,使计算值一步一步向实验料值科靠近,拟合采用最小二乘法,
材
拟合直到两者的差值 M 最小。
学
大
∑ M = wi (Yoi − Yci )2
2
2.进入 Jade,打开数据文件。
3.检索物相,扣除背景和 Kα2,平滑。
4.选择合适的峰形函数,对图谱反复进行拟合,直到 M 值不再变小。
5.选择 options-Cell Refinement,进行结构精修。
四、实验报告要求
1. 分析点阵常数变化的影响因素。
2. 3.
分析点阵常数精确测院量的误差来源及消除办法。 参考相关文献工,程简学要说明结构精修的作用与意义。
数据进行比较,便可求得扫描院范围内不同衍射角区域中的 2θ 校正值。这种方法简便易行,
学
通用性强,但其缺点是工不程能获得比标准物质更准确的数据。
②外推法精确学计与算点阵常数
修正晶胞料参科数的方法。假定实验测量的系统误差已经为零,那么从实验的任一晶面间距
院 材
数据求得学的同一个晶胞参数值在实验测量误差范围内应该是相同的,但实际上每一个计算得
与
学
南大学材料科 中
工程学院 学与
科
料
材
大学 中南
学院 工程
与
料科学
材
学
南大
中
3