西南交大机械原理期中考试试题(2002)
西南交大研究生入学《机械原理》考题
试题代码:824西南交通大学2008年硕士研究生招生入学考试试题名称:机械原理考试时间:2008年1月考生请注意:1 .本试题共七题,共5页,满分150分,请认真检查;2 .答题时,直接将答题内容写在考场提供的答题纸上,答在试卷上的内容无效;3 .请在答题纸上按照要求填写试题代码和试题名称;4 .试卷不得拆开,否则遗失后果自负。
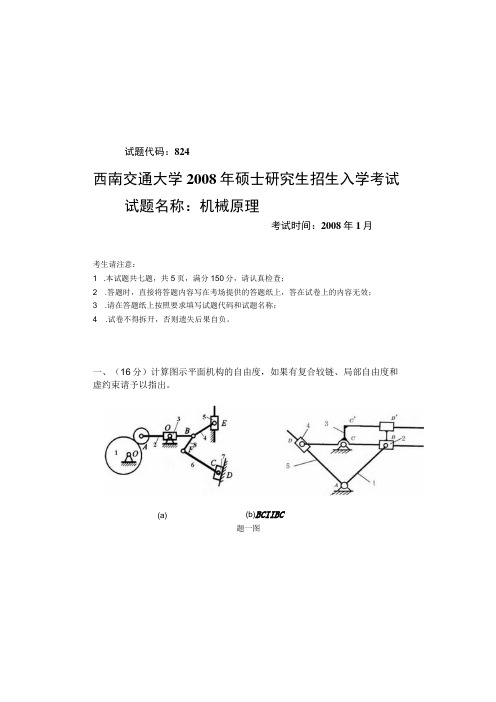
一、(16分)计算图示平面机构的自由度,如果有复合较链、局部自由度和虚约束请予以指出。
(b)BCIIBC(a)题一图二、(26分)直齿圆柱齿轮齿条传动,已知齿轮的分度圆半径厂=42加〃,模数m=6加机,压力角2=20°,正常齿制。
在正确安装的情况下,齿条分度线到齿轮转动中心。
的距离为457%加。
齿轮为主动,并沿逆时针方向转动。
1、确定齿轮的齿数z;2、判断齿轮是否发生根切现象;3、自选作图比例,画出啮合图,并在图上标出节点P,齿轮节圆啮合角α和实际啮合线BiB2;4、由所画出的啮合图确定重合度三、(17分)现要设计一个较链四杆机构ABCD,实现图示的将工件移动的三个位置,并且要求固定较链点A、D安置在图中虚线框之外。
1 .提出并说明机构的设计过程和方法(采用图解法,则必须说明作图步骤,并确定出各个构件的杆长;采用位移矩阵法,则必须说明如何得到机构的设计方程和如何得出各个构件的杆长);2 .说明应当检验的条件有哪些。
四、(27分)图示机构,构件1为原动件,转动的角速度为∕=500/7min。
图示机构的比例尺为μ,=().003%机。
1 .拆出机构中所含的基本杆组,并确定机构的级别;2 .确定在图示机构位置时,构件1与构件3之间的速度瞬心P∣3,并确定图示位置时构件3的速度;3 .确定图示位置时构件2上绝对速度为零的点的位置。
五、(28分)图示轮系,如果已知各个齿轮的齿数。
电机M 的转速%=10Oτz4∕S ∖转向如图所示。
1 .确定齿轮4转速的大小和转动方向;2 .如果所有齿轮均为标准齿轮,且为标准安装,问各个齿轮的模数应当满足什么样的关系?3 .如果取构件H 为等效构件,电动机M 的等效驱动力矩MedH=I °0"5①H(Nm),等效阻力矩可近似为常数Me rfI =25履Nni),等效转动惯量也近似为常数乙〃=8.2依/。
西南交通大学(已有09试题)
西南交通大学土木工程学院德语〔一外〕2021法语〔一外〕2021材料力学1996——1998,2000——2021〔2000——2006有答案〕土力学2001——2006,2021〔2001——2006有答案〕水力学2002——2004钢筋混凝土结构2001——2006结构力学1998,2001——2021环境化学2002——2021岩体力学2021工程地质学2002——2021遥感原理2021测量学2002——2021地理信息系统原理2021地理信息系统2002——2004,2006自然地理学2021理论力学1997——1998,2000——2003,2007——2021机械工程学院德语〔一外〕2021材料力学1996——1998,2000——2021〔2000——2006有答案〕理论力学1997——1998,2000——2003,2007——2021工程图学〔画法几何及机械制图〕2002——2007机械原理2000,2002——2021信号分析与处理2002——2006,2021工程流体力学2002——2021工程热力学及传热学2021计量学根底2002——2006自动控制原理A 2000电力电子技术1999——2000电力系统分析1999计量学根底2021地理信息系统原理2021地理信息系统2002——2004,2006电气工程学院德语〔一外〕2021法语〔一外〕2021电路分析1996——2021〔2000——2006有答案〕自动控制原理A 2000电力电子技术1999——2000电力系统分析1999地理信息系统原理2021地理信息系统2002——2004,2006信息科学与技术学院电子技术根底1999——2002,2004——2021信号与系统2000——2021〔2002——2006有答案〕程序设计1999——2003程序设计与数据结构2005——2021数据结构1999——2004数字通信原理2000——2021密码学2021离散数学1999——2000高等代数2001,2004——2021经济管理学院微观经济学1999,2001——2021宏观经济学1999技术经济学1999,2001生产管理1999,2001运筹学1999,2002——2021会计学2004——2006,2021人文社会科学学院德语〔一外〕2021法语〔一外〕2021经济学根底2021西方经济学2021经济法学2021法理学2021法学综合2021政治学原理2021比较政治制度2021马克思主义根本原理2021中国化马克思主义2021历史学专业根底〔全国统考试卷〕2007——2021交通运输学院德语〔一外〕2021法语〔一外〕2021管理运筹学1996——2021铁路行车平安理论及应用技术2021交通运输系统分析2021、2021建筑学院建筑历史与建筑技术2002,2005——2006,2021城市规划原理与城市建筑史2004——2006,2021南方某城市住区规划设计〔6小时〕2021建筑快题设计〔6小时〕2021建筑历史2021建筑物理2021建筑构造2021材料科学与工程学院生命科学根底2021生物化学根底2021生物医学工程2021材料科学根底2003,2021有机化学2002材料力学1996——1998,2000——2021〔2000——2006有答案〕机械工程材料2021工程材料2003生物工程学院生物化学2005,2021细胞生物学2005,2021〔注:2005年试卷共4页,缺第3-4页〕理学院高等数学2021高等代数2001,2004——2021数学分析2000——2002,2004——2021近世代数2000,2002量子力学2001——2021电路分析1996——2021〔2000——2006有答案〕光电检测技术2021电磁场与波2021应用力学与工程系材料力学1996——1998,2000——2021〔2000——2006有答案〕理论力学1997——1998,2000——2003,2007——2021外国语学院二外日语2002——2021二外法语2002——2005,2007——2021二外德语2002——2021二外俄语2002——2006,2021综合英语2001——2021语言学导论〔英〕2001——2021〔注:2001年试卷共5页,缺第5页〕英汉互译2001二外英语2007——2021根底德语2005——2021德汉互译2005——2021日汉互译2007汉日互译2021综合日语2005,2007——2021环境科学与工程学院德语〔一外〕2021工程流体力学2002——2021 环境化学2002——2021环境工程2002——2021环境生态学2021环境科学2005消防燃烧学2021水力学2002——2004体育部体育学根底综合2021药学院中药学根底综合2021旅游学院生物化学及植物生理学2021 旅游管理学2005,2021艺术与传播学院德语〔一外〕2021法语〔一外〕2021中国古代文学2021中外文学史2021语言学理论与现代汉语2021 古代汉语2021文学概论2021新闻写作与评论2021中外传播史2021中外美术史2021中外电影史2021中外音乐史2021艺术概论2021平面设计〔6小时〕2007室内设计〔6小时〕2007公共管理学院德语〔一外〕2021法语〔一外〕2021西方哲学史2021中国哲学史2021公共经济学2021公共管理学2021管理学2002——2004政策学2006运筹学1999,2002——2021微观经济学1999,2001——2021综合〔逻辑、数学〕2006工程科学研究院材料力学1996——1998,2000——2021〔2000——2006有答案〕机械原理2000,2002——2021材料科学根底2003,2021牵引动力国家重点实验室材料力学1996——1998,2000——2021〔2000——2006有答案〕机械原理2000,2002——2021信号分析与处理2002——2006,2021电子技术根底1999——2002,2004——2021信号与系统2000——2021〔2002——2006有答案〕CAD工程中心材料力学1996——1998,2000——2021〔2000——2006有答案〕超导研究开发工程中心超导物理根底2021量子力学2001——2021电路分析1996——2021〔2000——2006有答案〕材料科学根底2003,2021智能控制与仿真工程研究中心电路分析1996——2021〔2000——2006有答案〕电子技术根底1999——2002,2004——2021自动控制原理A 2000电力电子技术1999——2000电力系统分析1999软件学院教育学专业根底综合〔全国统考试卷〕2007——2021数学系高等代数2001,2004——2021数学分析2000——2002,2004——2021 近世代数2000,2002物流学院管理运筹学1996——2021物流与运筹学2021。
期中考试试题2015-2016
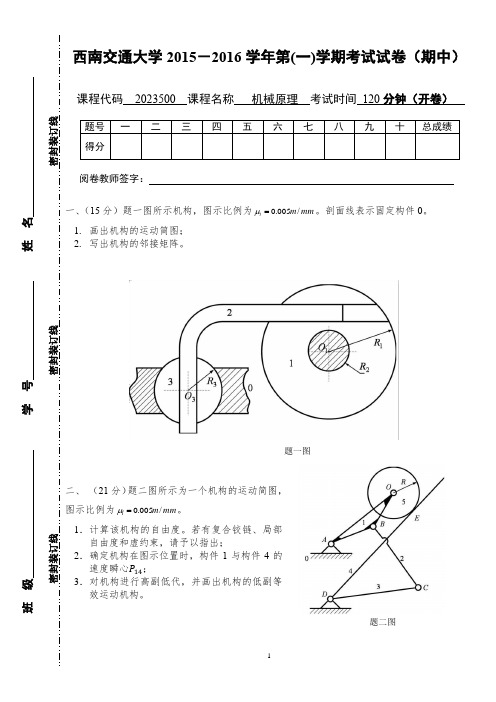
题二图西南交通大学2015-2016学年第(一)学期考试试卷(期中)课程代码 2023500 课程名称 机械原理 考试时间 120分钟(开卷)题号 一 二 三 四 五 六 七 八 九 十 总成绩 得分阅卷教师签字:一、(15分)题一图所示机构,图示比例为mm m l /005.0=μ。
剖面线表示固定构件0。
1. 画出机构的运动简图; 2. 写出机构的邻接矩阵。
二、 (21分)题二图所示为一个机构的运动简图,图示比例为mm m l /005.0=μ。
1.计算该机构的自由度。
若有复合铰链、局部自由度和虚约束,请予以指出;2.确定机构在图示位置时,构件1与构件4的速度瞬心P 14;3.对机构进行高副低代,并画出机构的低副等效运动机构。
题一图班 级 学 号 姓 名密封装订线 密封装订线 密封装订线题三图题五图题四图三、(19运动规律H,H ,H 、固定铰链点A 、C 的坐标,DE 、EF 的杆长、滑块5导路的y 1.现要确定运动输出构件5的运动。
解构件5的位置S 5的方程,度v 5和加速度a 5;2.3.在保证机构的输入运动和运动输出构件5画出修改后的机构示意图。
四、 (13已知l AB =l BC =l BD =a 。
1.试确定当构件1与x 轴之间夹角为α1D 1的坐标x D1, y D1;2.写出当构件1从与x 轴之间夹角为α1转动到连杆2的位移矩阵D 12;3.试利用D 12和x D1, y D1,确定出铰链点D 2x D2, y D2;4.试根据计算得到的x D1, y D1及x D2, y D24以及其上的运动副为虚约束。
五、(17分)题五图所示为一个管道机器人的设计示意图。
图中机器人本体通过支腿1和支腿2支撑在管道中,支腿1和支腿2分别通过转动副B 和D 与机器人本体相连接。
设计要求是当机器人本体的姿态为P i (x Pi ,y Pi ),θi ,支腿1必须撑在管道壁上的点A i (x Ai ,y Ai ),而支腿2必须撑在管道壁上的点C i (x Ci ,y Ci ),i =1,2,⋯,n 。
机械原理-期中考试题-答案
机械原理-期中考试题-答案湖州师范学院 2012 — 2013学年第二学期《机械原理》期中考试试卷适用班级考试时间 100 分钟学院班级学号姓名成绩一、填空(每空1分,共10分) 1、在转子平衡问题中,偏心质量产生的惯性力可以用质径积相对地表示。
2、平面连杆机构中,同一位置的传动角与压力角之和等于 90度。
3、一个曲柄摇杆机构,极位夹角等于36o,则行程速比系数等于1.5 。
4、刚性转子的动平衡的条件是∑F=0,∑M=0 。
5、曲柄摇杆机构出现死点,是以摇杆作主动件,此时机构的传动角等于零。
6、机器产生速度波动的类型有周期性和非周期性两种。
7、在曲柄摇杆机构中,如果将最短杆作为机架,则与机架相连的两杆都可以作整周回转运动,即得到双曲柄机构。
8、三个彼此作平面运动的构件共有三个速度瞬心,且位于同一直线上。
二、选择题(每题1分,共10分) 1、在设计铰链四杆机构时,应使最小传动角γmin _B _。
A .尽可能小一些B .尽可能大一些C .为0°D .45°2、机器运转出现周期性速度波动的原因是_C __。
A.机器中存在往复运动构件,惯性力难以平衡;B.机器中各回转构件的质量分布不均匀;C.在等效转动惯量为常数时,各瞬时驱动功率和阻抗功率不相等,但其平均值相等,且有公共周期;D.机器中各运动副的位置布置不合理。
3、有一四杆机构,其行程速比系数K=1,该机构_A_急回作用。
A.没有;B.有;C.不一定有4、机构具有确定运动的条件是_B_。
A.机构的自由度大于零;B.机构的自由度大于零且自由度数等于原动件数;C.机构的自由度大于零且自由度数大于原动件数;D.前面的答案都不对5、采用飞轮进行机器运转速度波动的调节,它可调节_B_速度波动。
A.非周期性;B.周期性;C.周期性与非周期性;D.前面的答案都不对6、从平衡条件可知,静平衡转子_B_动平衡的。
A.一定是;B.不一定是;C.一定不是7、若两刚体都是运动的,则其速度瞬心称为 C 。
西南交大 机械设计 期中试卷

班 级 学 号 姓 名题一、答案填写表(每小题1。
5分,共15分)1、机械设计这门学科,主要研究______ 的工作原理、结构和设计计算方法.A.各类机械零件和部件B.通用机械零件和部件C.专用机械零件和部件 D.标准化的机械零件和部件2、对于采用常见的组合和按标准选取尺寸的平键静联接,主要失效形式是_____。
A. 工作面的压溃 B。
工作面过度磨损 C. 键被剪断 D. 键被弯断3、同精度的齿轮传动,动载荷系数Kv与__________有关。
A. 圆周速度B。
齿轮在轴上相对于轴承的位置C。
传动超载D。
原动机及工作机器的性能和工作情况4、V带的楔角等于__________。
A. 40︒B. 35︒ C。
30︒ D. 20︒5、带传动采用张紧轮的目的是____________。
A。
减轻带的弹性滑动B. 提高带的寿命C。
改变带的运动方向D。
调节带的初拉力6、螺栓联接中,有时在一个螺栓上采用双螺母,其目的是__________。
A. 提高强度B. 提高刚度C。
防松D。
减小螺纹牙受载7、受轴向工作载荷的紧螺栓联接,设螺栓刚度远远大于被联接件的刚度,则螺栓中的总拉力接近____________________________________。
A. =F'+F B。
<F'+F C. >F'+F D. =F'+8、标准直齿圆柱齿轮传动,轮齿弯曲强度计算中的齿形系数只决定于_____。
A. 齿数z B。
模数m C. 齿宽系数φd9、一对圆柱齿轮传动,通常把小齿轮的齿宽取值比大齿轮略大,其主要目的是______。
A。
使小齿轮的强度比大齿轮略高一些B。
减小传动中的动载荷C。
为了便于安装,保证有效接触宽度D. 避免沿齿向载荷分布不均匀10、在一定转速下,要减轻链传动的运动不均匀性和动载荷,应______。
A。
增大链节距和链轮齿数 B。
减小链节距和链轮齿数C。
增大链节距,减小链轮齿数 D。
机械原理考试试题及答案
一、选择题(每空 2 分,共 10 分)1、平面机构中,从动件的运动规律取决于D 。
A 、从动件的尺寸B 、机构组成情况C、原动件运动规律D 、原动件运动规律和机构的组成情况2、一铰链四杆机构各杆长度分别为30mm ,60mm ,80mm,100mm,当以 30mm 的杆为机架时,则该机构为 A 机构。
A 、双摇杆B、双曲柄C、曲柄摇杆D、不能构成四杆机构3、凸轮机构中,当推杆运动规律采用C时,既无柔性冲击也无刚性冲击。
A 、一次多项式运动规律B、二次多项式运动规律C、正弦加速运动规律D、余弦加速运动规律4、平面机构的平衡问题中,对“动不平衡”描述正确的是B 。
A 、只要在一个平衡面内增加或出去一个平衡质量即可获得平衡B、动不平衡只有在转子运转的情况下才能表现出来C、静不平衡针对轴尺寸较小的转子(转子轴向宽度b与其直径 D 之比b/D<0.2 )D 、使动不平衡转子的质心与回转轴心重合可实现平衡A 、模数B、分度圆上压力角C、齿数D、前 3 项、填空题(每空 2 分,共 20 分)1、两构件通过面接触而构成的运动副称为低副2、作相对运动的三个构件的三个瞬心必在同一条直线上3、转动副的自锁条件是驱动力臂≤摩擦圆半径4、斜齿轮传动与直齿轮传动比较的主要优点:啮合性能好,重合度大,结构紧凑。
5、在周转轮系中,根据其自由度的数目进行分类:若其自由度为 2,则称为差动轮系若其自由度为 1,则称其为行星轮系。
6、装有行星轮的构件称为行星架(转臂或系杆)。
7、棘轮机构的典型结构中的组成有:摇杆、棘爪、棘轮等。
三、简答题(15分)1、什么是构件?答:构件:机器中每一个独立的运动单元体称为一个构件;从运动角度讲是不可再分的单位体。
2、何谓四杆机构的“死点”?答:当机构运转时,若出现连杆与从动件共线时,此时γ=0,主动件通过连杆作用于从动件上的力将通过其回转中心,从而使驱动从动件的有效分力为零,从动件就不能运动,机构的这种传动角为零的位置称为死点。
《机械原理》试卷答案(02级)

《机械原理》考试卷参考答案02一、填空(每空1分,共20分)1.零件、构件、原动件2.摇杆、从动曲柄、连杆3.曲柄摇杆、双曲柄、双摇杆4.从动件受到凸轮的驱动力、从动件速度方向5.节、分度圆6.主轴角速度、运动不均匀系数、飞轮的转动惯量7.棘轮机构、不完全齿轮机构、槽轮机构、凸轮式间歇机构等任选两个8.C、A9.A10.轮、调速器11.离心惯性力向量和等于零且力偶矩代数和等于零二、简答题(每题6分,共30分)1.答:----------------------------------------------------------------------6分在实际机械中常常存在虚约束是为了增加机械的刚度、平衡惯性力。
2.答-------------------------------------------------------------------------6分1)控制齿数Z>Z min2)正变位X>X min3)不采用展成法加工3.答:----------------------------------------------------------------------6分定义:实际啮合线长度与基圆齿距之比。
重合度反映一对齿轮是否能实现连续传动。
重合度与模数无关,随齿数的增加而增加,中心距加大时重合度减小。
4.答-------------------------------------------------------------------------6分惯性力是加在有变速运动的构件上的虚拟力。
当构件加速运动时,惯性力为阻力;当构件减速时为驱动力。
在一个运动循环中作功和为0。
5.答:-----------------------------------------------------------------------6分 偏置的目的:减小凸轮机构推程压力角。
ηδ=1。
西南交大机械原理2008—2009学年期末考试(1)A
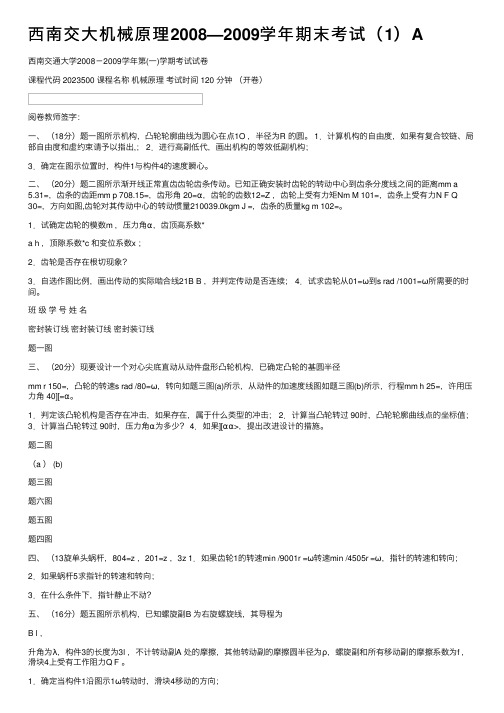
西南交⼤机械原理2008—2009学年期末考试(1)A西南交通⼤学2008-2009学年第(⼀)学期考试试卷课程代码 2023500 课程名称机械原理考试时间 120 分钟(开卷)阅卷教师签字:⼀、(18分)题⼀图所⽰机构,凸轮轮廓曲线为圆⼼在点1O ,半径为R 的圆。
1.计算机构的⾃由度,如果有复合铰链、局部⾃由度和虚约束请予以指出,; 2.进⾏⾼副低代,画出机构的等效低副机构;3.确定在图⽰位置时,构件1与构件4的速度瞬⼼。
⼆、(20分)题⼆图所⽰渐开线正常直齿齿轮齿条传动。
已知正确安装时齿轮的转动中⼼到齿条分度线之间的距离mm a 5.31=,齿条的齿距mm p 708.15=,齿形⾓ 20=α,齿轮的齿数12=Z ,齿轮上受有⼒矩Nm M 101=,齿条上受有⼒N F Q30=,⽅向如图,齿轮对其传动中⼼的转动惯量210039.0kgm J =,齿条的质量kg m 102=。
1.试确定齿轮的模数m ,压⼒⾓α,齿顶⾼系数*a h ,顶隙系数*c 和变位系数x ;2.齿轮是否存在根切现象?3.⾃选作图⽐例,画出传动的实际啮合线21B B ,并判定传动是否连续; 4.试求齿轮从01=ω到s rad /1001=ω所需要的时间。
班级学号姓名密封装订线密封装订线密封装订线题⼀图三、(20分)现要设计⼀个对⼼尖底直动从动件盘形凸轮机构,已确定凸轮的基圆半径mm r 150=,凸轮的转速s rad /80=ω,转向如题三图(a)所⽰,从动件的加速度线图如题三图(b)所⽰,⾏程mm h 25=,许⽤压⼒⾓ 40][=α。
1.判定该凸轮机构是否存在冲击,如果存在,属于什么类型的冲击; 2.计算当凸轮转过 90时,凸轮轮廓曲线点的坐标值;3.计算当凸轮转过 90时,压⼒⾓α为多少? 4.如果][αα>,提出改进设计的措施。
题⼆图(a ) (b)题三图题六图题五图题四图四、(13旋单头蜗杆,804=z ,201=z ,3z 1.如果齿轮1的转速min /9001r =ω转速min /4505r =ω,指针的转速和转向;2.如果蜗杆5求指针的转速和转向;3.在什么条件下,指针静⽌不动?五、(16分)题五图所⽰机构,已知螺旋副B 为右旋螺旋线,其导程为B l ,升⾓为λ,构件3的长度为3l ,不计转动副A 处的摩擦,其他转动副的摩擦圆半径为ρ,螺旋副和所有移动副的摩擦系数为f ,滑块4上受有⼯作阻⼒Q F 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
西南交通大学机械原理期中考试试题
机械2002级使用
班级学号姓名
一、(14分)题一图所示为一个油泵机构
的结构图,构件1和构件2分别绕
固定点A和固定点D转动。
1、画出该机构的运动简图;
2、画出该机构拓扑图,并写出该机构
的邻接矩阵;
3、计算该机构的自由度。
二、(12分)题二图所示机构
1.若机构中有复合铰链、局部自由度和
虚约束,请予以指出;
2.进行高副低代,画出其低副运动等效
机构;
3.当以构件4为原动件时,拆出机构所
含的基本杆组,并确定机构的级别。
三、(14分)题二图中,已知各固定
铰链点的位置、各构件的杆长和原
动件4的运动。
现要用直角坐标解
析法求解构件4、5之间的相对运
动和构件1的角运动。
1、按照求解顺序写出机构位置分析
的方程式;
2、简要说明如何求解构件4、5之间
的相对速度和相对加速度,以及构
件1的角速度和角加速度;
3、利用速度瞬心的概念和方法,确定
出机构在图示位置时构件6上绝对
速度为零的点P的位置。
题一图
(图示比例为
mm
m
l
002
.0
=
μ)
题二图
四、 (15分)现要设计平面三杆机械手,实现末
端构件PC 的位置i i i i y x ϕ ),,(P 与构件AB 的角位置i θ之间的对应关系, 3,2,1=i 。
已知固定铰链点B(0,0)。
1、说明用位移矩阵法如何得到机构的设计方程;
2、分析最多能够实现多少组这样的对应精确位置关系。
五、 (15分)题五图所示凸轮机构,凸轮匀速
转动,角速度为ω。
在凸轮转动一周的时间内,要求从动件在第一个3秒内以正弦加速度运动规律从最低位置上升到最高位置,行程mm h 30=,然后,在最高位置处停留1秒,再在最后的2秒内以等速运动规律由最高位置下降到最低位置。
凸轮的
基圆半径mm r 200=。
1、 写出从动件位移S 与凸轮转角δ之间的关系式)(δS ,并画出从动件的位移线图的示意图δ--S ;
2、 判断机构运动中是否存在冲击,如果存在冲击,属于什么类型的冲击;
3、 计算出凸轮转角为320°凸轮轮廓曲线点的坐标值0
320320 ,y x ;
4、 如果仅仅将尖底从动件改为滚子从动件,问将会带来的好处是什么,从动件的运动规律是否会发生变化,为什么?
六、 (18分)题六图所示机构,构件AB 匀速转动,已知mm a 120=,
mm b 600=,mm e 120=。
1、 指出机构中哪些转动副为周转副; 2、 画出滑块C 的极限位置; 3、 标出机构的极位夹角θ;
4、 如果保持偏距e 和滑块的行程不变,而将极位夹角θ改为30°,问此时机构的行程速比系数K 是多少,杆长AB l 和BC l 应为多少?
题四图
题六图
题五图
七、(12分)题七图为一种压力机的结构示意图。
由作用在滑块6上的力P驱
动,而在滑块2上输出压力
F,铰链点A为固定铰链点。
r
1.为该机构选择一种能够提供力P的驱动装置;
2.提出一种与现有机构有所不同、但机构的功能却相同的新机构设计方案。
画
出新机构的机构示意图,并简要说明机构的不同之处。
题七图。