电液速度伺服系统的智能控制研究
电气工程中电液伺服系统的建模与控制

电气工程中电液伺服系统的建模与控制电液伺服系统在电气工程中扮演着重要的角色,它是将电力和液压技术相结合的一种控制系统。
本文将探讨电液伺服系统的建模与控制方法,旨在帮助读者深入了解该系统的原理和应用。
1. 引言电液伺服系统是一种将电力与液压技术相结合的控制系统,它具有快速、精确以及大扭矩输出的特点,广泛应用于工业自动化领域。
该系统通常由液压执行机构、液压装置、电机、传感器以及控制器等组成。
2. 电液伺服系统的建模电液伺服系统的建模是理解系统行为和进行控制设计的重要基础。
一般来说,电液伺服系统的建模可以分为力平衡模型和压力平衡模型两种。
2.1 力平衡模型力平衡模型是基于力学平衡原理建立的,它通过分析液体在液压缸内的流动以及液压缸和负载之间的力平衡关系来描述系统行为。
该模型主要考虑了负载的机械特性以及阀门的开度对液体流量和压力的影响。
2.2 压力平衡模型压力平衡模型是基于流体的压力平衡原理建立的,它通过分析液体在液压缸内的流动以及阀门的开度对液体流量和压力的影响来描述系统行为。
该模型不考虑负载的机械特性,主要关注液体流动的特性以及阀门对压力的调节。
3. 电液伺服系统的控制电液伺服系统的控制主要包括位置控制、速度控制和力控制三种。
在控制设计中,通常使用比例积分微分(PID)控制器或模糊控制器来实现系统性能的改善。
3.1 位置控制位置控制是电液伺服系统中最常见的一种控制方式。
它通过控制液压缸的位置来实现对负载的准确控制。
在控制设计中,可以根据负载的特性选择适当的控制方法,如PID控制器或模糊控制器。
3.2 速度控制速度控制是电液伺服系统中实现对负载速度精确控制的一种方式。
在速度控制中,控制器通常根据传感器反馈的速度信号来调节液压缸的速度。
PID控制器常被用于速度控制中,通过调节比例、积分和微分参数来改善系统的响应性能。
3.3 力控制力控制是电液伺服系统中实现对负载施加特定力的控制方式。
在力控制中,控制器通常调节液压缸施加的力来满足特定的要求。
电液速率伺服系统的智能控制研究

嬲
NM W
B
0
PS PM P8
0 0
NM NB
t dB
尸 s
0 0
图 5
图 6
0
0
帽
3 仿 真 研 究
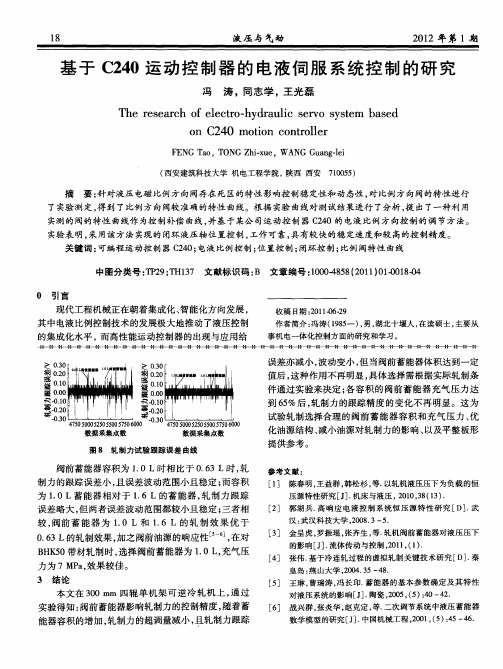
仿真对象 是一个 电液 伺 服阀控 马达 速 度系统 :考 虑 电液伺服 系统 是典 型非 线性 系统 ,非线 性 系统 可 以 看 成是非线性 环节 串联 线 性 环节 而成 的 由于伺 服 阄
《 机床 与液 压》2O o O2N
6
( ( ) 6 )
制精度低 :而采用 自适 应模 糊控 制 系统 ,对 初 始模 糊 控制器 的参数进 行 了修正 .使 系统 的控 制性 能得 到 了
由于控 制对象 的特性 未知 .
不易获 得 ,但 是
明显 的改 善 输 出能够 较好 的跟 踪输 A 。但 是 ,实际 电液伺服 系统的一 些非 线性 因素 是复杂 的 ,该 自适 应 模糊控制 器的性能还 有待于在 实验 中检验
关键词 :电液 速度伺 服系统 ;自适应 模糊控制 ;B P算法
模糊控制 的动态 特性 难 以满 足要 求。 因此本 文结合 神
经 网络 的 B P算 法 来完 善 模 糊控 制 规 则 ,使 隶 属 函数
囝 1
在控制 过程 中能 自动地调 整 和完 善 ,以达到 期望 的控
制 目的 。
具有普遍意义 。 2 自适应模糊 控制方 法
其中 :
=c 一r
f : .“ ,
y + = ( 一( r } 1 y gy ) ) ) . 襄
同理 有
图1 为本文 的电液速度伺服系统 自适应 模糊控制框
基于PID算法的电液伺服阀速度控制系统的研究

浅析基于PID算法的电液伺服阀速度控制系统的研究摘要:本文主要是结合液压传动技术和自动控制技术,设计一种基于pid算法的电液伺服阀速度控制器。
液压系统在机械传动方面有着十分重要的应用,尤其是其具有传动过程中工作稳定、传递功率负荷大、传动能量方向灵活可控、调节控制方便等等优势,非常适合在机械制造、工程机械、大型交通工具等场合应用。
关键词:plc;控制系统;pid;电液伺服系统是液压自动控制领域中的一门重要研究技术,由于其具有良好、快速、高精度的控制效果和能量,该技术其应用面非常广泛。
近年来,随着计算机技术的迅猛发展和在自动控制领域的应用,如何将计算机控制技术应用于液压伺服控制已经成为人们研究的重点和热点。
本文主要讲的是如何设计出一种基于pid算法的电液伺服速度控制系统。
1、系统工作原理及参数电液伺服阀速度控制系统是通过电液伺服阀控制两柱压力机匀速上升或下降的高精度控制系统,由电气控制部分和液压驱动部分组成。
系统工作原理如下:当上位计算机实现上升或下行功能时,对控制器发出下行指令,控制器根据位置传感器及速度反馈回路的信号输出相应的控制信号,经伺服阀放大器驱动电液伺服阀输出相应流量,在电机、液压回路系统等相关执行机构作用下,两柱压力机油缸匀速上升或下降;系统的控制核心为由控制器、电液伺服阀、反馈回路构成的闭环控制系统。
1.1 伺服阀电液伺服阀速度控制系统的核心元件是伺服阀,系统中采用的伺服阀是中船重工上海704所生产的csdy1/2型伺服阀。
csdy1csdy2电液伺服阀结构牢固、分辨率极高、控制精度高适用于各领域的高精度电液伺服系统。
如:造船工业、航天工业、航空工业、重工业、轻、纺工业,以及农业机械液压伺服系统。
csdy1csdy2电液伺服阀工作时,高压油ps一路通过滤油器进入射流管喷嘴,另一路进入阀芯和阀套组成的通路。
当无信号电流时,阀处于零位,无流量输出。
当有控制信号电流输入时,使射流管喷嘴偏转(设顺时针),接受器左腔压力上升,右腔压力下降,阀芯在压差作用下右移,其油路ps-a-1负载-2-c-p。
《2024年电液伺服系统模糊PID控制仿真与试验研究》范文

《电液伺服系统模糊PID控制仿真与试验研究》篇一一、引言随着现代工业自动化技术的飞速发展,电液伺服系统作为重要组成部分,在众多领域中发挥着重要作用。
然而,由于电液伺服系统存在非线性、时变性和不确定性等特点,其控制问题一直是研究的热点和难点。
传统的PID控制方法在面对复杂多变的环境时,往往难以达到理想的控制效果。
因此,本文提出了一种基于模糊PID控制的电液伺服系统控制策略,并进行了仿真与试验研究。
二、电液伺服系统概述电液伺服系统主要由液压泵、液压马达、传感器和控制器等部分组成。
它利用电信号驱动液压系统工作,实现对负载的精确控制。
由于其具有高精度、快速响应等特点,在机械制造、航空航天、船舶等领域得到了广泛应用。
然而,由于电液伺服系统的复杂性,其控制问题一直是研究的重点。
三、模糊PID控制策略针对电液伺服系统的特点,本文提出了一种模糊PID控制策略。
该策略结合了传统PID控制和模糊控制的优点,通过引入模糊逻辑对PID参数进行在线调整,以适应系统参数的变化和环境干扰。
模糊PID控制策略能够在保证系统稳定性的同时,提高系统的响应速度和抗干扰能力。
四、仿真研究为了验证模糊PID控制策略的有效性,本文进行了仿真研究。
首先,建立了电液伺服系统的数学模型和仿真模型。
然后,分别采用传统PID控制和模糊PID控制对模型进行仿真实验。
通过对比两种控制策略的响应速度、稳态精度和抗干扰能力等指标,发现模糊PID控制在电液伺服系统中具有更好的性能。
五、试验研究为了进一步验证模糊PID控制策略的实用性,本文进行了试验研究。
在试验过程中,首先搭建了电液伺服系统的试验平台,然后分别采用传统PID控制和模糊PID控制对实际系统进行控制。
通过对比两种控制策略的试验结果,发现模糊PID控制在电液伺服系统中具有更高的稳态精度和更快的响应速度。
此外,在面对环境干扰时,模糊PID控制也表现出更强的抗干扰能力。
六、结论本文通过对电液伺服系统的模糊PID控制进行仿真与试验研究,验证了该策略的有效性。
基于C240运动控制器的电液伺服系统控制的研究
的影响 [] 流体传 动与控制 , 1 ,1. J. 2 1() 0
[ ] 张伟. 4 基于冷连 轧过 程的虚 拟轧制关键技 术研究 [ . D] 秦
皇岛 : 山大学 ,04 3 4 . 燕 2 0 .5— 8
[ ] 王琳 , 5 曹瑞 涛 , 长印. 冯 蓄能器 的基本 参数确定 及其 特性
F ENG o,TONG ix Ta Zh —ue,W ANG Gua g li n —e
( 西安建筑科技大学 机 电工程学 院陕西 西安
7 05 ) 10 5
摘
要 : 对 液压 电磁 比例 方 向阀存 在死 区的特性 影 响控制 稳 定性和 动 态性 , 比例 方向 阀的特 性进 行 针 对
了实验测 定 , 到 了比例 方向 阀较 准确 的特性 曲线 。根 据 实验 曲线 对测试 结 果进行 了分析 , 出了一 种利 用 得 提 实测 的 阀的特 性 曲线作 为控 制补 偿 曲线 , 并基 于 某公 司运 动控 制 器 C 4 2 0的 电液 比例 方 向控 制 的调 节 方 法 。
差调 节 的 闭环控 制方 式 。 本 文研 究 了一种 基 于 运 动控 制 器 C 4 20的液 压伺
向时都会出现大的滞后性和冲击 , 这样就导致给定输
出与执 行 速 度 之 间 的 关 系 并 不 是 线 形 的 ( 图 2所 如
示) 。一 旦我 们还 以控 制 线 性 电气 轴 的模 型来 控 制 非 线性 液 压轴 , 速度 会非 常不 稳定 , 而且 位置 闭环会 不 停
度控制 , 达到了较高的控制精度和响应速度。 1 电液伺 服 系统 简介 电液伺服 系统 以其 响应速度 快 ( 相对 于机 械系 统 ) 负载 刚度 大 、 、 控制 功 率 大 等 独特 的优 点 在工 业 控
电液伺服系统的建模与控制

电液伺服系统的建模与控制1. 引言电液伺服系统是一种广泛应用于工业控制领域的系统,它可以通过控制液压执行器的输出来实现对机械运动的精确控制。
本文将介绍电液伺服系统的建模与控制方法,以帮助读者更好地了解和应用这一技术。
2. 电液伺服系统的概述电液伺服系统由液压执行器、电液伺服阀、传感器和控制器等组成。
液压执行器负责将液压能转化为机械能,电液伺服阀负责控制液压执行器的动作,传感器用于反馈系统状态信息,控制器根据传感器的反馈信息对电液伺服阀进行控制。
3. 电液伺服系统的建模建模是控制系统设计的第一步,对于电液伺服系统也是不可或缺的。
电液伺服系统的建模既可以基于理论模型,也可以基于实验数据进行。
3.1 理论模型在理论模型建模中,我们需要考虑液压执行器、电液伺服阀和控制器的动态特性。
液压执行器的动态特性可以用惯性、摩擦、密封等参数来描述。
电液伺服阀的动态特性可以用阀门的流量-压力特性和阀门饱和现象来描述。
控制器的动态特性通常可以用传统的PID控制算法进行建模。
3.2 实验模型在实验模型建模中,我们需要通过实验得到系统的频率响应和传递函数,并将其转化为数学模型。
这种方法对于实际系统的建模更加准确,但也需要大量的实验数据和较高的技术要求。
4. 电液伺服系统的控制控制是电液伺服系统中最关键的环节之一。
常用的电液伺服系统控制方法有位置控制、速度控制和力控制等。
4.1 位置控制位置控制是电液伺服系统中最基本的控制方法之一。
通过控制电液伺服阀的输出来控制液压执行器的位置。
传感器将执行器的位置信息反馈给控制器,控制器根据反馈信息进行调节,使得系统实现期望的位置跟踪。
4.2 速度控制速度控制是电液伺服系统中常用的控制方法之一。
通过控制电液伺服阀的输出来控制液压执行器的速度。
传感器将执行器的速度信息反馈给控制器,控制器根据反馈信息进行调节,使得系统实现期望的速度跟踪。
4.3 力控制力控制是电液伺服系统中一种高级的控制方法。
电液伺服系统的设计与实现

电液伺服系统的设计与实现随着科技的不断发展,机械设备的功能和性能要求也越来越高。
而在众多机械设备中,电液伺服系统以其优良的性能和高效的工作模式,已经成为了广泛应用的设备之一。
本文将就电液伺服系统的设计和实现进行讨论,以期提高其性能和工作效率。
一、电液伺服系统的组成电液伺服系统是由3个部分组成的:电子控制单元、电液传动系统和执行机构。
1. 电子控制单元电子控制单元包括控制器和信号处理器,控制器是整个系统的核心。
它可以接收来自传感器的反馈信息,根据内部程序计算出控制信号,并输出到执行机构,实现对执行机构的精确控制。
2. 电液传动系统电液传动系统是整个电液伺服系统的动力源,它包括电液转换器、电动机、泵、油箱、阀门等组成。
电动机通过传动装置,驱动泵产生压力液体,液体经过阀门进入执行机构,实现机械臂等动作。
3. 执行机构执行机构是电液伺服系统的输出节点,它通过接收液压驱动,转换为机械运动。
在典型的电液伺服系统中,执行机构通常包括液压缸、液压马达、液压单元等。
二、电液伺服系统的优点1. 精度高因为电液伺服系统可以接收来自传感器的反馈信息,根据内部程序计算出控制信号,并输出到执行机构,实现对执行机构的精确控制,所以其控制精度很高,可以满足高精密度机械设备的要求。
2. 动态性能好电液伺服系统的调节速度快,反应灵敏。
它不仅可以适应于各种工况的需要,而且可以根据需要进行控制和调节。
相比之下,其他传动系统难以满足这些要求。
3. 可扩展性强电液伺服系统的结构比较清晰,它根据要求可以进行功能扩展。
同时,它也可以与其他的控制系统进行集成,如PLC、CAN总线等。
三、电液伺服系统的设计电液伺服系统的设计必须根据所需的实际应用来进行,下面简单介绍了一些设计方法。
1. 系统参数计算电液伺服系统的设计一定要进行系统参数计算,以确保正确的系统工作。
主要包括负载惯性、运动速度、加速度、油液流量、泵、马达的型号、离合器等参数的计算。
2. 控制系统设计控制系统设计是电液伺服系统设计的核心问题。
电液伺服系统的同步控制研究
题描 述 : 一个箱形 梁, 量 9 0t长 3 宽 1 . m, 质 0 , 2m, 3 4 高3m, 需要 用 载重 卡 车 将 其 从 A 地 点运 输 至 B地 点, 输过 程 中箱 形梁 采用 4个 油 缸支 撑 , 油缸 运 4个 固定在 载重 卡车 上 , 运输 中 由液 压 系统 保持 箱 形 在
维普资讯
第 2 卷 第 6期 8
20 07年 6月
兵
工
学
报
Vo . 8 12 NO 6 .
A CTA ARM AM ENTAR I I
J n. 2 0 u 07
电液 伺 服 系统 的 同步 控制 研 究
李长春,孟亚 东,刘晓东,周欣
a b x gr e f 0 o s o i ro 0 t n .Po iin s n h o ia in c n r l t o o i e t o c r cn o to d 9 st y c r n z t o to o o me h d c mb n d wi f r e ta i g c n r l h ag r h wa u o wa d t e p t e g r e o io t l n u p r e y 4 c l d r v r g l .Th l o i m sp t r r o k e h id r h rz n a d s p o t d b y i e sa e a ey t f a n e
出现在起重 机和 轧钢 设备 的大 型 液 压系 统 上 , 这 在 些场 合 , 负载 条件 下 的 多个 线 性 油缸 执 行 机 构 的 带 同步性 能十分重 要 。本 文针 对某 大型航天 装备 运输
过程 中 的同步控 制 问题 开 展 研 究, 输 过 程 中 不仅 运 要求保 持装备 的 水平 , 而且 要 求 。为此 , 将该 装备 描述 成试验 中的箱型梁 , 并 由 4个 伺服油 缸 支撑 , 合 采 用 位置 同步 控制 与 力 综 跟踪控 制方法 实现 同步控 制 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
环非线性、饱和非线性)和参数不确定性,导致经典 的 PID 控制难以满足控制性能要求,而智能控制在非 线性控制方面有巨大潜力,所以本文把智能控制引入 电液伺服系统控制之中。神经网络控制虽有很大的控 制非线性问题的能力 ,但算法较繁杂 ;而模糊控制 则不仅具有控制非线性问题的能力 ,而且能以较少的 规则表达知识,系统简单而透明,算法简单,鲁棒性 强,但也存在控制精度不高,难以进行学习的缺点, 模糊控制的动态特性难以满足要求。因此本文结合神 经网络的 BP 算法来完善模糊控制规则,使隶属函数 在控制过程中能自动地调整和完善,以达到期望的控 制目的。 " 本文采用的模糊控制系统 提出了一种模糊逻辑系统, 其解析式如下: 文献 [1] x i - a li 2 6 li i=1 i=1 ( f x )= m I x i - a li 2 exp " # 6 li i=1 i=1 T 式中 x = ( x 1, 为模糊逻辑系统的输入, x2 … xI ) f
! 上海市教委科技发展基金资助项目
a = 6 =
(y z ) "
l l
"z
i=1
l
f = a/6 y l , a li, 6 li 三个参数的在线学习算法分别为: E y l ( I + 1) = y l ( I ) - g! l !y 其中!El = !E!y !Ul = ( y - r )!y 1 z l ; U = f !U 6 !y !y !U!y y zl y l ( I + 1) = y l ( I ) - g ( y - r )! U ! 6 同理有 y a li( I + 1) = a li ( I ) - "( y - r )! ( y l - U ) U ! l ) z l 2( x i - a i( I ) 2 6 ( 6 li( I ) ) y 6 li( I + 1) = 6 li ( I ) - "( y - r )! ( y l - U ) !U
英推出接地螺栓焊接工具
英国 Crompton Stud 焊接公司推出了 Crompton CDM8 手动焊接工具。它可以完全按照英国 BS415 标准将安 全接地螺栓与电器设备上的铁质或有色金属部件焊成 一体。 使用该工具操作时,无需作任何预先的准备,将 螺栓直接装载在手动工具上就可将螺栓与工件焊接牢 固。这种手动焊接工具可广泛用于民用、商业和工业 设备的安装。使用十分简便,而且不会在焊接表面上 留下任何伤痕,从而可有效地确保成品或镀层表面的 质量。 胡正隆
m I
图1
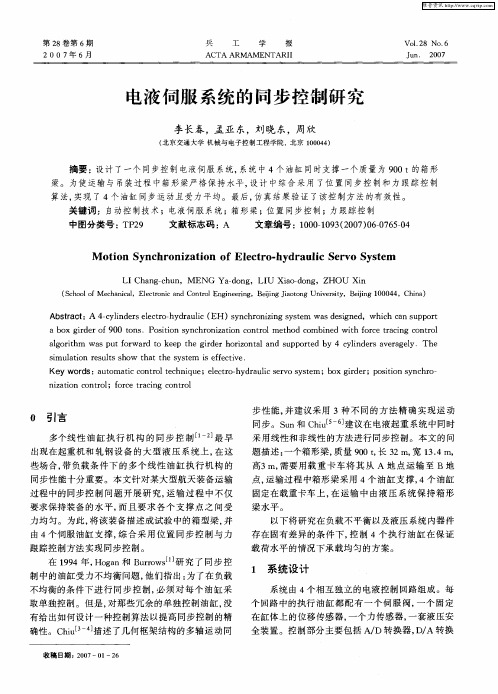
希望系统输出 y 跟踪输入 r 的变化, 取性能函数为 1 2 , 利用误差反向传播学习算法对参数 y l , E = ( r - y) 2 使得 E 满足系统的要求。 a li, 6 li 进行在线调整, 图 2 为模糊逻辑系统用三层前馈网络表示的形式, 其中 exp zl
l "y
[[# exp -源自图3 图2 规则表 E NB NM NS 0 PS PM PB NB PB PB PM PM PS 0 0 NM PB PB PM PM PS 0 0 NS PB PB PM PS 0 NM NM Ec 0 PB PB PM 0 NM NB MB PS PM PM 0 NS NM NB NB PM 0 0 NS NM NM NB NB PB 0 0 NS NM NM NB NB
本文读者也读过(3条) 1. 唐铃凤.王雷.Tang Lingfeng.Wang Lei 基于Matlab电液速度伺服系统的设计与优化[期刊论文]-机械传动2006,30(3) 2. 李斌.原思聪.张会杰.张满意.潘宏洲.LI Bin.YUAN Sicong.ZHANG Huijie.ZHANG Manyi.PAN Hongzhou PID控制器在水 平连铸设备电液速度伺服系统中的应用研究[期刊论文]-机床与液压2009,37(7) 3. 刘庆荣.邢科礼.温济全 自适应模糊控制在电液速度伺服系统中的应用研究[期刊论文]-液压气动与密封2002(2)
・ "! ・
l 2 ) z l 2( x i - a i( I ) l 3 6 ( 6 i( I ) )
《机床与液压》2002. No.1
制精度低。而采用自适应模糊控制系统,对初始模糊 控制器的参数进行了修正,使系统的控制性能得到了 明显的改善,输出能够较好的跟踪输入。但是,实际 电液伺服系统的一些非线性因素是复杂的,该自适应 模糊控制器的性能还有待于在实验中检验。 " 结论 本文将自适应模糊控制理论引入电液速度伺服系 统之中,该控制方法采用模糊控制的概念,并结合 BP 算法,解决了模糊系统不能自学习的问题,为模糊系 统的自学习提供了一种方法。仿真结果表明该控制方 法的有效性。
由于控制对象的特性未知,!y 不易获得,但是 y !U (I) , U ( I )是可以计算的,而且!y 精度并不要求很 !U 高,用差分形式代替偏导数,即: ( I) ( I - 1) !y = y , 其中 U ( I) ( I - 1) 。 !U ( ) ( I - 1) U U I U ! 由此构成了自适应模糊系 其中 g , !, " 为学习率, 统。
电液速度伺服系统的智能控制研究
作者: 作者单位: 刊名: 英文刊名: 年,卷(期): 被引用次数: 刘庆荣, 邢科礼, 温济全 上海大学机电工程与自动化学院,200072 机床与液压 MACHINE TOOL & HYDRAULICS 2002(1) 9次
参考文献(5条) 1.黄文梅 智能复合控制在电液伺服系统中的应用 1998(05) 2.周昌玉 采用BP算法的模糊自适应控制 [期刊论文]-北京航空航天大学学报 1998(03) 3.王耀南 智能控制系统 1996 4.王立新 自适应模糊系统与控制—设计与稳定性分析 1995 5.柴田论 ファジィニューラルネットを用いた重力负荷を受ける空气压サボ系の制御 1999(04)
!
仿真研究 仿真对象是一个电液伺服阀控马达速度系统。考
虑电液伺服系统是典型非线性系统,非线性系统可以 看成是非线性环节串联线性环节而成的。由于伺服阀 的响应很快,忽略其动态,简化为一个比例环节 I SU 。 系统 的 线 性 环 节 为 比 例 环 节 I SU 与 二 阶 振 荡 环 节 1/ D 的串联,线性环节模型参数如下: I SU = 2 S h $ S +1 2 + # h #h ,$h = 0.79,#h = 150rad / S, D = 4000cm3 / ( S. A )
引证文献(9条) 1.王琳松.孔建益.杨金堂.张一檬.李公法 大转动惯量液压伺服系统的控制仿真研究[期刊论文]-机床与液压 2009(6) 2.王琳松.孔建益.杨金堂 高线集卷站回转台传动系统的设计及其控制仿真研究[期刊论文]-机械设计与制造 2009(4) 3.刘乐 电炉强化吹氧燃烧控制系统关键技术的研究[学位论文]硕士 2007 4.罗智勇.万健如.李维平 电液速度伺服RBF模糊自适应控制[期刊论文]-机床与液压 2006(9) 5.罗智勇.李维平.马永光 RBF模糊自适应控制在电液速度伺服系统中的应用[期刊论文]-机械工程师 2005(11) 6.赵敬伟 伺服阀控液压马达速度控制系统性能研究[学位论文]硕士 2005 7.李远慧 工业炉用电液阀门位置控制系统研究[学位论文]硕士 2005 8.王斌 禽蛋白质自动检测系统的调速控制研究[学位论文]硕士 2005 9.许国华 斗轮式挖泥船挖掘轨迹控制及综合监控研究[学位论文]硕士 2005
!
引言 电液速度伺服系统的非线性(如死区非线性、滞
正大, 隶属函数为高斯型。 NB 、 NM 、 NS 、 0、 PS 、 PM 、 PB 的中心值分别取 - 7, 所有的宽度为 2。 - 4, - 1, 0, 1, 4, 7; 由此确立了解析式模糊控制器的初始参数 y l , a li, 6 li 的 值。
本文链接:/Periodical_jcyyy200201016.aspx
图4
图5
图6
参考文献
【1】王立新 . 自适应模糊系统与控制 . 国防工业出版社,1995 【2】王耀南 . 智能控制系统 . 湖南大学出版社,1996 【3】周昌玉 . 采用 BP 算法的模糊自适应控制 . 北京航空航天 大学学报,1998(3) :291 ~ 294 【4】黄文梅等 . 智能复合控制在电液伺服系统中的应用 . 湖 南大学学报 ,1998(5) :5 ~ 8 【5】柴田論等 . ファジィニュ を受ける空气压サ ラルネットを用いた重力负荷 ボ系の制御 . 日本机械学会论文集
2
( C) ,1999(4) :1476 ~ 1482
收稿时间:2001 - 04 - 16
63cm3 / r,各符号的意义遵从液压系统的默认含义。非 线性环节为加 10 % 死区非线性。 分别采用 PID 控制,模糊控制(采用初始模糊控 制器) ,自适应模糊控制,对电液速度伺服系统进行仿 真,其正弦响应如图 3 ~ 图 5 所示,图中两条曲线分 别表示期望输出曲线和实际输出曲线。图 3 为 PID 控 制响应曲线,图 4 为模糊控制响应曲线,图 5 为自适 应模糊控制响应曲线。在采用自适应模糊控制的情况 下,增大死区特性为 15% 时,同样得到了较好的仿真 结果,如图 6 所示。 通过仿真结果可以看出,把初始模糊控制应用在 电液速度伺服系统中,控制性能好于 PID 控制,但控
[ ( [ (
l
) ]] ) ]]
) ) 为输入变量的高斯型隶属函数: x - a = # exp[ - ( )] 6
x i - a li 6 li
2
I
( (
i=1 M i=1 M
i
l 2 i
l i
( x) 为模糊逻辑系统的输出, y 为第 l 条规则输出模糊集 合的中心值, a li 为第 l 条规则的输入的第 i 个语言变量 所取的模糊集合的中心值, 6 li 为其宽度。其中 y l , a li, 6 li 为可调节参数, …, l = 1, 2…, m 为规则的条数, i = 1, 2, I 为模糊系统的输入变量的个数。 文献[1]从理论上严格证明了(1)式可在任意 精度上一致逼近任何定义在一个致密集上的非线性函 数,因此将该式作为解析模糊控制器用于对系统控制 具有普遍意义。 # 自适应模糊控制方法 图 1 为本文的电液速度伺服系统自适应模糊控制框 图, 速度误差的变化量。 E , E, Ec 分别为速度误差, Ec 为 FC 的输入, U 为 FC 的输出, FC 表示的模糊控制器可 利用专家经验构成初始模糊控制器。模糊控制器的控制 规则采用 Mamcani 规则, 如表所示。有 49 条规则, 2 个输 入, 即 m = 49, I = 2。 E 、 Ec 的模糊量 NB 、 NM 、 NS 、 0、 分别代表负大、 负中 、 负小、 零、 正小、 正中、 PS 、 PM 、 PB ,