基于Modbus_RTU的远程输入输出接口设备的设计
modbus rtu单片机范例

modbus rtu单片机范例1.引言1.1 概述概述部分:Modbus RTU是一种常用的串行通信协议,广泛应用于工业自动化领域。
本文将介绍Modbus RTU协议的基本原理和特点,并结合单片机的应用场景,探讨如何在单片机中实现基于Modbus RTU的通信。
在工业自动化领域,通信是各种设备之间进行数据交换和控制的重要手段。
Modbus RTU作为一种开放、简单、可靠的通信协议,被广泛应用于监控、控制和数据采集等应用场景。
其优势在于其使用简单、可扩展性好以及兼容性强。
文章的结构将从Modbus RTU的基本原理和数据帧结构入手,介绍其通信流程和通信方式。
并通过具体的单片机应用场景,展示如何利用Modbus RTU进行设备之间的数据交互和控制。
通过这些例子,读者将深入理解Modbus RTU的应用原理和具体操作。
本文旨在为读者提供一个Modbus RTU在单片机应用中的范例,并通过实际案例来展示如何利用该协议进行数据通信。
同时,本文也将探讨当前Modbus RTU在单片机应用中存在的问题和挑战,并提供一些未来研究方向的建议。
通过阅读本文,读者将能够全面了解Modbus RTU协议的基本原理和应用场景,掌握在单片机中实现Modbus RTU通信的方法,以及面临的挑战和未来的发展方向。
希望本文能对读者在工业自动化领域的学习和实践有所启发,为他们的项目开发提供一定的指导和帮助。
1.2 文章结构文章结构是指组织和安排文章内容的方式和顺序。
在本文中,文章结构按照以下方式组织:引言部分包括概述、文章结构和目的;正文部分包括Modbus RTU介绍和单片机应用场景;结论部分包括总结和下一步研究方向。
引言部分将首先提供一个概述,介绍Modbus RTU单片机范例的背景和重要性。
然后,进一步阐述文章的结构,显示读者整篇文章将如何组织和涵盖哪些方面。
最后,明确文章的目的,即讨论和探索有关Modbus RTU单片机范例的相关内容。
基于Modbus RTU协议的数字智能模块的设计

并 行 和 串行 在 系统 编程 ( I S P ) 。P 8 9 V 5 1 R D 2具 有 如 下结 构 特 性 :增 强 型 U A R T( 异 步 串行 收 发 器 ) 、3个 1 6位 定 时 / 计 数 器 、工 作 频 率 达 4 0 MH z 、可 编 程 计 数 器 阵列 ( P C A) 、 8个 中断 源 ( 4个 中 断优 先 级 ) _ 3 ] 。这 些 功 能 特 点 为 数 字 智 能模 块 的设 计 提 供 了必 需 的 资 源 。 数字 智能模块的温度传感器选用 D a l l a s 半 导体 公 司 生 产的 1 一 Wi r e数 字 温 度 芯 片 D S 1 8 B 2 0 。 它 属 于 新 一 代 适 配 于 微 处 理 器 的 智 能 温度 传 感 器 ,广 泛 用 于 工 业 、民用 、军 事 等 领 域 的 温 度 测 量及 控 制 仪 器 、测 控 系 统 中 。 D S 1 8 B 2 0 测 温范 围- 5 5 ℃- + 1 2 5 ℃ ,温 度 在 一 1 0 ℃一 + 8 5 ℃范 围 时 精 度 达± 0 . 5 ℃ ;芯 片 温 度 转 换 时 间 为 7 5 0 m s[ 4 3 。D S 1 8 B 2 0传 感 量 小 的 特点 ,并 采 用 金 属 垫 膜 工 艺 使 D S 1 8 B 2 0与 不 锈 钢 内 壁 充 分 接 触 ,同 时 使 用 导 热 性 高 的 密 封 胶 灌 封 ,保 证 了 温 度 传感 器 的 高 灵 敏性 ,极 小 的 温 度 延 迟 ,并 达 到 防 水 防 潮 的 现场 应 用 要 求 。关 于 D S 1 8 B 2 0的应 用 和 设计 国 内 均 有 不
新 消息 帧 在 小 于 3 . 5 个 字符 时 间 内接 着 前 一 个 消 息 帧 开 始 ,
NOTIFIER基于MODBUS协议的设备接口定义

温度或者 浓度值
干结点 复位
6
模块状 态
5:4
0:屏蔽 1:使能
00: 正常 01: 开路 10: 短路 11: 保留
位描述
探测器/模块类型
3:2
模块
探测器
00:监视模块 00:感温
01:控制模块 01:感烟
10:保留
10:激光感烟
11:保留
11:气体
类型 1
0:探测器 1:模块
安装状 态
0
0: 未 安 装 1: 已 安 装
注意:第三方系统的 MODBUS 设备在进行状态寄存器表配置时,探测器可以映射到寄存器的 第 0-199,但是模块只能映射到寄存器的第 100-199,而且第 0 号与第 100 号寄存器为系统保留, 不可进行配置。
HW-2500-396
第 6 页 共 10 页
寄存器序 号
探测值 15:7
0-199
表 1 RTU 模式下字节的格式
注意:如果奇偶校验为 NONE,则相应停止位设置为 2,从而保证每个数据字节 11 位的完整性。
4.3 波特率及时间参数 本接口定义设备之间通讯的波特率以及传输周期和响应时间如下:: (1) 波特率: 9600 bps (默认) (2) 轮巡周期: 5s(默认) (3) 响应时间: 1000ms(默认) 传输周期被定义为 LPI-MODBUS 每次读写所有定义的寄存器的时间。响应时间被定义为第三 方系统的 MODBUS 设备收到 LPI-MODBUS 的消息后进行应答的时间。当一个主站单播请求发送给 从站时,主站进入“等待应答”状态,并开始”响应超时”.”响应超时”防止主站处于不确定的“等待应答” 状态。 注意:轮巡周期和响应时间通过配置文件可以根据实际工程进行相应的修改。
很好的威纶通MODBUSRTU通讯协议与变频器通讯案例

很好的威纶通MODBUSRTU通讯协议与变频器通讯案例威纶通(Veintron)是一家专注于工业自动化领域的企业,他们开发了一种基于MODBUS RTU通讯协议的变频器产品,用于实现变频器与其他设备之间的数据交互。
以下是一个关于威纶通MODBUS RTU通讯协议与变频器通讯的案例。
在工厂的生产线上,使用了一台威纶通的变频器控制其中一种设备的转速。
工作人员希望通过上位机监控和控制变频器,以提高整个生产线的效率和稳定性。
首先,需要配置上位机与变频器之间的通讯连接。
上位机采用RS-485接口与变频器进行通讯。
通过串口配置软件,设置上位机的通讯参数,例如波特率、校验位等。
在变频器侧,需设置相应的通讯参数,以确保与上位机的通讯一致。
威纶通的变频器支持MODBUSRTU通讯协议,因此在通讯过程中需要按照该协议的规范进行数据交互。
MODBUSRTU是一种基于串行通讯的协议,使用二进制数据格式进行传输。
在上位机端,可以使用编程语言(如C、C++、Python)或者现有的SCADA软件(如Intouch、LabVIEW)进行开发。
这里以C语言为例,使用串口编程库进行通讯处理。
首先,在上位机端打开串口,并设置串口的通讯参数。
然后,通过MODBUSRTU协议定义相关的指令和数据格式,以实现与变频器之间的数据交互。
例如,使用MODBUSRTU读取变频器的转速,可以发送如下的读取指令:010*********C40B其中,01表示设备地址(每个变频器都有一个唯一的地址),03表示读取寄存器的功能码,0000表示要读取的寄存器地址,0002表示要读取的寄存器数量。
C40B是CRC校验码,用于校验数据的正确性。
当变频器接收到读取指令后,会按照指令中的地址和数量读取相应的寄存器数据,并通过串口返回给上位机。
上位机接收到数据后,可以解析出变频器的转速并进行相应的处理。
类似地,上位机也可以通过MODBUSRTU协议向变频器发送写入指令,以实现对变频器的控制。
基于ModBusRTU协议的MCGS应用系统与单片机通信设计
方式 :对象 链 接与嵌 入 O L E、 D D E( 动 态数 据交 换1 、 O P C 、 驱动程序l 1 ] 。 在实 际应用 中多采用编写专用驱动 程序 实现 , 但 此法工 作量 大 , 需 要根据不 同型号 的单 片机专 门定制相应的驱动程序。 本文利用 M C G S 提供
的标 准 的 M o d B u s R T U协 议 设 备 驱 动 。通 过 单 片机 程
序 设 计 实 现 Mo d B u s R T U协 议 ,并 以 T P C1 5 6 1 Hi 型 嵌
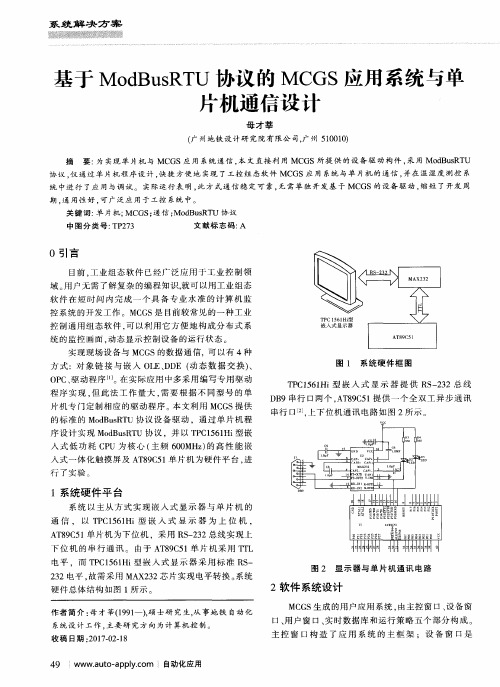
图1 系统 硬 件 框 图
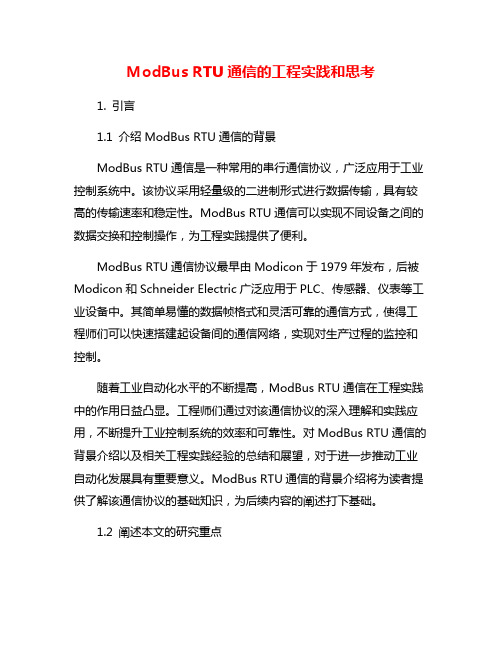
T P C l 5 6 1 Hi 型 嵌 入式 显 示 器 提 供 R S 一 2 3 2总 线 D B 9串行 口两 个 , A T 8 9 C 5 1 提 供 一 个 全 双 工 异 步 通 讯 串行 口 , 上 下 位 机 通 讯 电路 如 图 2所 示 。
系 统 解 决 方 案
_ l l ¨ l l l l l
基 于 Mo d B u s R T U 协 议 的 MC GS应用 系 统 与单 片机通信设 计
母 才莘
f 广 州地铁设 计研 究 院有 限公 司, 广州 5 1 0 0 1 0 ) 摘 要: 为 实现 单 片机 与 MCG S应 用 系统通 信 , 本 文 直接利 用 MC GS所提 供 的设 备驱 动 构件 , 采 用 Mo d Bu s R T U
表 1 M0 d B u s RT U 设 备 构 件 配 置
设备属性名 设备属性值
启 动
C0M 1 9 6 0 0
初始工作状态
串 口 端 口号
设备 窗 口通 过设备 构件把 外 部设备 的数 据采 集
ModBus RTU通信的工程实践和思考
ModBus RTU通信的工程实践和思考1. 引言1.1 介绍ModBus RTU通信的背景ModBus RTU通信是一种常用的串行通信协议,广泛应用于工业控制系统中。
该协议采用轻量级的二进制形式进行数据传输,具有较高的传输速率和稳定性。
ModBus RTU通信可以实现不同设备之间的数据交换和控制操作,为工程实践提供了便利。
ModBus RTU通信协议最早由Modicon于1979年发布,后被Modicon和Schneider Electric广泛应用于PLC、传感器、仪表等工业设备中。
其简单易懂的数据帧格式和灵活可靠的通信方式,使得工程师们可以快速搭建起设备间的通信网络,实现对生产过程的监控和控制。
随着工业自动化水平的不断提高,ModBus RTU通信在工程实践中的作用日益凸显。
工程师们通过对该通信协议的深入理解和实践应用,不断提升工业控制系统的效率和可靠性。
对ModBus RTU通信的背景介绍以及相关工程实践经验的总结和展望,对于进一步推动工业自动化发展具有重要意义。
ModBus RTU通信的背景介绍将为读者提供了解该通信协议的基础知识,为后续内容的阐述打下基础。
1.2 阐述本文的研究重点本文主要研究的重点是ModBus RTU通信的工程实践和应用。
通过对ModBus RTU通信协议的深入分析,探讨其在工业控制系统中的具体应用和优势。
将重点描述ModBus RTU通信在实际工程中可能遇到的故障,并提供解决方案。
本文还将探讨如何优化ModBus RTU通信的性能,以提高系统的稳定性和效率。
结合实际案例,介绍ModBus RTU通信系统集成的实践经验,分享经验和教训。
通过对这些重点内容的研究和分析,我们旨在总结出ModBus RTU通信在工程实践中的经验教训,展望其未来发展趋势,并深入思考ModBus RTU 通信对工程实践的意义和价值。
2. 正文2.1 ModBus RTU通信协议分析ModBus RTU通信协议是一种常见的串行通信协议,广泛应用于工业自动化领域。
力控modbus通信方法modbus-tcp、modbus-rtu莫迪康通信配置步骤

⼒控modbus通信⽅法modbus-tcp、modbus-rtu莫迪康通信配置步骤⽬录第 1 章 485 设备与⼒控通讯1.1DI/DO/AI/AO 接⼊1.1.1添加设备1.1.2测试设备1.2读取 DI 状态1.3输出/读取 DO 状态1.4读取 AI 值第 2 章以太⽹设备与⼒控通讯2.1DI/DO/AI/AO 接⼊2.1.1添加设备2.1.2测试设备2.2读取 DI 状态2.3输出/读取 DO 状态2.4读取 AI 值第 1章 485 设备与⼒控通讯1.1DI/DO/AI/AO 接⼊以 ZKA-4088-RS485 为例,介绍综科智控 485 设备与⼒控进⾏通讯的步骤设置。
ZKA-4088-RS485 是8 路数字量输⼊(D I),8 路数字量输出(DO),4 路模拟量输⼊设备(AI,0/4-20mA),485 通信总线。
以 ZKA-4088-RS485 出⼚默认通讯参数如下:站号:01波特率:115200数据格式:8,N,1与电脑连接的端⼝:客户查看电脑设备管理器中的COM⼝,选择实际使⽤的端⼝1.1.1添加设备选择:IO 设备组态>[PLC] > [莫迪康] > [ModbusRTU] 如下图所⽰:为设备取⼀个名称,在此输⼊ TEST,单击“下⼀步”,如下图所⽰。
为设备选择连接串⼝,选择COM4,根据实际对应COM 参数设置,并保存选择 6 和 16 号命令,选择 32 位数数据存放格式:1.1.2测试设备在设备上右键> [TEST],如下图所⽰:1.2读取 DI 状态ZKA-4088-RS485的 8路 DI 寄存器为 10001~10008:如上图所⽰,寄存器 DI001 变量值为 1,表⽰此时第 1 个输⼊通道X1闭合。
1.3输出/读取 DO 状态ZKA-4088-RS485 的 8路 DO 寄存器为 00001~00008:新建 IO 点,选择可读可写建⽴ IO 点完成后,点击运⾏按,即可读取 DO 状态在对应的 IO 点上右键>写数据写⼊ 1,则通道 DO1 输出,设备上 Y1灯亮1.4读取 AI 值ZKA-4088-RS485 的 4 路 AI(模拟量输⼊)寄存器为 30001~30008,因为ZKA模块采⽤的是32位AD芯⽚,所以每个模拟量通道占⽤ 2 个寄存器,共4 个字节(32bit),其中⾼两个字节为采集结果的⾼16bit,低两个字为采集结果的低16bit,模块出⼚时为保证⾼精度,滤波后输出16bit,所以⽤户实际使⽤时只需要读取低16bit采集结果即可,,也就是读取偏置0002,0004,0006,0008地址上的寄存器数据,数据类型为⽆符号整型。
rtu远程透传的使用方法
rtu远程透传的使用方法
RTU(远程终端单元)是一种用于监控和控制远程设备的设备,
它可以通过无线或有线网络与中央控制中心通信。
远程透传是指通
过RTU设备实现远程数据传输和控制的功能。
下面我们来介绍一下RTU远程透传的使用方法。
1. 确定通信协议,首先需要确定通信协议,常见的有Modbus、DNP3、IEC 60870-5-101/104等。
根据实际情况选择合适的通信协议。
2. 配置RTU设备,在RTU设备上进行相关配置,包括设置通信
参数、设备地址、数据采集间隔、报文格式等。
3. 连接传感器或执行器,将需要监控或控制的传感器或执行器
连接到RTU设备上,确保设备能够正确读取传感器数据并控制执行器。
4. 确定数据传输方式,根据实际情况选择数据传输方式,可以
是GPRS、3G/4G、以太网、无线射频等。
5. 配置中央控制中心,在中央控制中心配置与RTU设备通信的参数,确保能够与RTU设备建立通信连接。
6. 监控和控制,通过中央控制中心可以实时监控RTU设备采集的数据,并进行远程控制操作。
7. 故障排查和维护,定期对RTU设备进行故障排查和维护,确保设备正常运行。
总的来说,使用RTU远程透传需要对设备进行合理的配置和连接,并确保设备之间的通信畅通,这样才能实现远程监控和控制的功能。
希望这些方法能够帮助大家更好地使用RTU远程透传技术。