组态人机界面与单片机通信案例
单片机与组态王的通信实例
单片机与组态王的通信实例随着工业自动化的发展,越来越多的设备开始采用单片机进行控制。
而组态王作为一种通用的组态软件,可以方便地对单片机的控制过程进行监控和操作。
本文将介绍一个单片机与组态王通信的实例,以帮助读者了解二者的基本通信原理和实现方法。
一、单片机与组态王的通信方式单片机与组态王之间的通信一般采用串口通信方式。
串口通信是一种常见的通信方式,它通过串口数据线将单片机与计算机连接起来,实现数据传输。
在组态王中,可以通过设置串口参数来与单片机进行通信。
二、单片机通信协议在单片机与组态王通信的过程中,需要约定一些通信协议来实现数据的传输和控制。
通信协议一般包括数据格式、波特率、校验方式等。
根据不同的单片机和组态王版本,通信协议可能会有所不同,需要根据实际情况进行调整。
三、组态王通信控件的使用在组态王中,可以使用串口通信控件来实现单片机与组态王之间的通信。
控件提供了许多函数和属性,可以方便地进行串口通信。
例如,可以使用控件的Open函数打开串口,使用Read函数和Write函数进行数据的读取和写入。
四、实例:单片机控制LED灯亮灭下面是一个简单的单片机与组态王通信实例:通过单片机控制LED灯的亮灭。
该实例中使用的单片机型号为AT89C51,组态王版本为6.53。
1、硬件连接将AT89C51单片机的P1.0引脚连接到LED灯上,并将单片机的RXD 和TXD引脚分别连接到计算机的串口上。
2、编写程序在AT89C51单片机上编写程序,用于控制LED灯的亮灭。
程序如下:MOV P1.0, #1 //将P1.0引脚电平设为高电平,LED灯亮SJMP $ //无限循环,保持电平不变3、组态王组态设计在组态王中创建一个新项目,并添加一个设备,选择与AT89C51单片机进行通信的串口设备。
然后创建一个画面,添加一个按钮和指示灯,用于控制LED灯的亮灭。
4、编写组态王脚本程序在组态王中编写脚本来实现与单片机的通信。
脚本如下:Dim ledState As Integer //定义LED状态变量,初始值为0 Function OnClick() As Integer //按钮单击事件处理函数If ledState = 0 Then //如果LED状态为灭,则发送高电平信号,使LED亮起CommandManager.WriteTag("TagName", "1") //写入高电平信号ledState = 1 //修改LED状态为亮Else //如果LED状态为亮,则发送低电平信号,使LED熄灭CommandManager.WriteTag("TagName", "0") //写入低电平信号ledState = 0 //修改LED状态为灭End IfEnd Function5、调试与运行将程序编译并下载到AT89C51单片机中,然后运行组态王程序。
基于ModBusRTU协议的MCGS应用系统与单片机通信设计
方式 :对象 链 接与嵌 入 O L E、 D D E( 动 态数 据交 换1 、 O P C 、 驱动程序l 1 ] 。 在实 际应用 中多采用编写专用驱动 程序 实现 , 但 此法工 作量 大 , 需 要根据不 同型号 的单 片机专 门定制相应的驱动程序。 本文利用 M C G S 提供
的标 准 的 M o d B u s R T U协 议 设 备 驱 动 。通 过 单 片机 程
序 设 计 实 现 Mo d B u s R T U协 议 ,并 以 T P C1 5 6 1 Hi 型 嵌
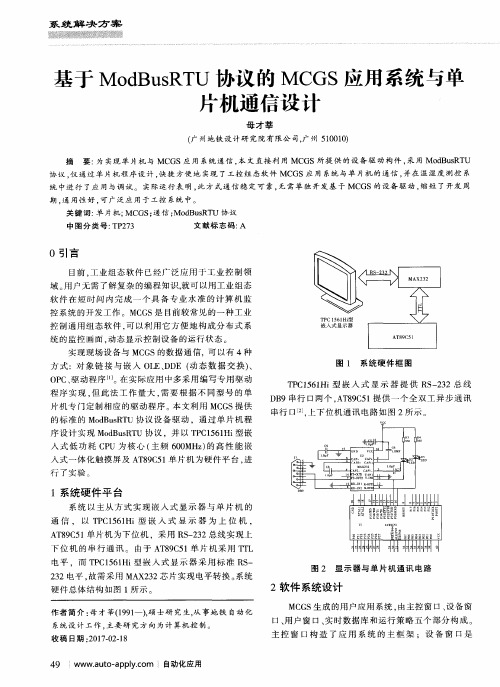
图1 系统 硬 件 框 图
T P C l 5 6 1 Hi 型 嵌 入式 显 示 器 提 供 R S 一 2 3 2总 线 D B 9串行 口两 个 , A T 8 9 C 5 1 提 供 一 个 全 双 工 异 步 通 讯 串行 口 , 上 下 位 机 通 讯 电路 如 图 2所 示 。
系 统 解 决 方 案
_ l l ¨ l l l l l
基 于 Mo d B u s R T U 协 议 的 MC GS应用 系 统 与单 片机通信设 计
母 才莘
f 广 州地铁设 计研 究 院有 限公 司, 广州 5 1 0 0 1 0 ) 摘 要: 为 实现 单 片机 与 MCG S应 用 系统通 信 , 本 文 直接利 用 MC GS所提 供 的设 备驱 动 构件 , 采 用 Mo d Bu s R T U
表 1 M0 d B u s RT U 设 备 构 件 配 置
设备属性名 设备属性值
启 动
C0M 1 9 6 0 0
初始工作状态
串 口 端 口号
设备 窗 口通 过设备 构件把 外 部设备 的数 据采 集
单片机与人机界面HMI通讯,教你如何做好数据保存功能。

在很多时候,涉及到单片机控制的产品都需要用到一个显示界面(正确称为人机界面最为合适,简称HMI),然而,单单显示又是不够的,很多单片机主板采集到的模拟量,数字量等数据需要进行保存功能,人机界面与单片机断电之后,等下次设备再次开机的时候,又需要把之前的数据以一定的表格,曲线显示出来,这种功能称之为断电数据保存功能。
解决的方案有2种:1.单片机主板里面集成EEROM等掉电存储芯片。
这种是最为传统的解决方案,优点在于一般的单片机工程师都能够想到,缺点是成本比较高,增加编程的难度,尤其是数据量大的时候,芯片的价格也相应增长。
如果是用在数据量比较少的场合,用普通的STC等单片机就可以了,因为单片机里面集成了EEROM,存储量至少是 1K以上的。
2.选择带有数据保存功能的人机界面,更复杂的还有配方等功能。
这种方案的优势很明显,节约成本,单片机主板设计简单,编程也方便,存储容量更大,还可以时时把相关采集数据以excel等文件的格式复制到U盘。
现在就做个例程,介绍如何把单片机采集的各路数据进行保存,整改,对比,复制到U 盘等等。
该工程应用实例是基于测控行业的一种仪器设计的,模拟量采集有16路,涉及到精确的数据显示,我们采用32位有符号数表示(这个可以在人机界面编程的时候设计,步骤有说到)。
相关步骤如下:1.安装相应的嵌入式组态软件,这里以广州市微嵌计算机科技有限公司()的组态软件为例,因为涉及单片机开发的,它可以提供工业标准的Modbus RTU协议和简单的自由协议接口函数。
安装好组态软件之后,双击桌面软件图标点击“新建”,如下图:2.选择人机界面HMI的型号,这里选择WQT_T8048_070(800*480),点击下面的新增按钮,表示新增与人机界面连接的设备串口这里选用工业标准的Modbus RTU协议作为与单片机连接的协议,当然也可以选择自由协议(free protocol)。
点击下一步,进入工程描述状态,这些根据个人情况填写,填写之后点击确定进入画面编辑状态。
组态王与单片机多机串口通信的设计方案

组态王与单片机多机串口通信的设计1 引言随着工业化要求提高,分布式系统发展以及控制设备与监控设备之间通讯需要,组态软件设计的监控系统逐步普及。
现在组态软件繁多,比如KingVieW(组态王>、MCGS、W inCC等。
KingView软件基于Microsoft Windows XP,NT/2000操作系统.具有友好的人机操作界面、强大的IO设备端口驱动能力,可与各种PLC、智能仪表、智能模块、板卡、变频器等实时通讯。
由于在检测大量模拟量的工业现场使用PLC与组态软件通讯势必增加产品成本。
而单片机接口丰富,与A/D转换模块组合可以完成相同的工作,并且系统可靠、成本低。
2 组态王与单片机的串口通讯方法目前,组态王与单片机的通信多是通过动态数据交换(DDE>或通过自己开发通讯驱动程序完成。
DDE是Windows平台上的一个完整的通信协议,组态王通过该协议与其他应用程序交换数据。
但不可靠和非实时。
而自己开发通讯驱动程序会带来设计困难,增加系统开发周期,可行性不高。
组态王专门提供一种与单片机多机串口通信方法,可满足大多数系统需求。
3 PC机与单片机的硬件接口电路图1为上位PC机与下位单片机80C51的连接电路。
PC机与单片机本身都自带串行通讯接口,但由于在分布式系统中PC机与各单片机的分布不集中,不能利用RS-232通讯传输,只能改用RS-485。
RS-485采用差分式传输信号,最大传输距离为1 219 m.最大传输速率为10 Mb/s.对同时出现的两条信号线A、B的干扰有较强的抑制能力。
当两条线绞在一起时,被通信各种分布参数耦合过来的干扰信号可平均地分配到这两条线上,因此对RS-485的差分式传输线路而言,用双绞线可获得较强的抗干扰能力。
RS-485采用二线与四线平衡传输方式,二线制可实现真正的多点双向通信,但需要在传输线上接电阻(约120 Ω>。
由于80C51系列单片机STC89C52串行接口的,TTL电气特性与RS-485电气特性不相符,STC89C52不能与RS-485直接连接,需要电气转换。
组态王65与单片机的通信方法
&h
II
T 222222 a .+J. (5Q,*9.*.(K.LEAEM"NGG"X&!R I I 读数据请求 T 222222 a .+J. (5Q,*9.*.(K.LEAEM"NGG"X&%R I I 写数据请求 T 222222 a I P 发送数据 P I (5Q,*O.)->,DR T U<G"H 9<G"H :OG"H *0*G"H 5C0Q(G"H(/,*O.)->,DH(__R T OV?FG,*O.)-LEAEM(NH \3(+.QU<GG"R H U<G"H *0*eG,*O.)-LEAEM(NH a OV?FG"X"fH I I 发送 :U8 \3(+.QU<GG"R H U<G"H *0*eG"X"fH 发送校验位 OV?FG*0*H II \3(+.QU<GG"R H U<G"H a a I P 初始化串口 P I KC(- ()(Ab,E0AQKC(-R T 222222 a KC(- DE()QKC(-R T ()(Ab,E0AQRH \3(+.Q$R T :OG$H E)J\.0b*D-QRH a a
图’
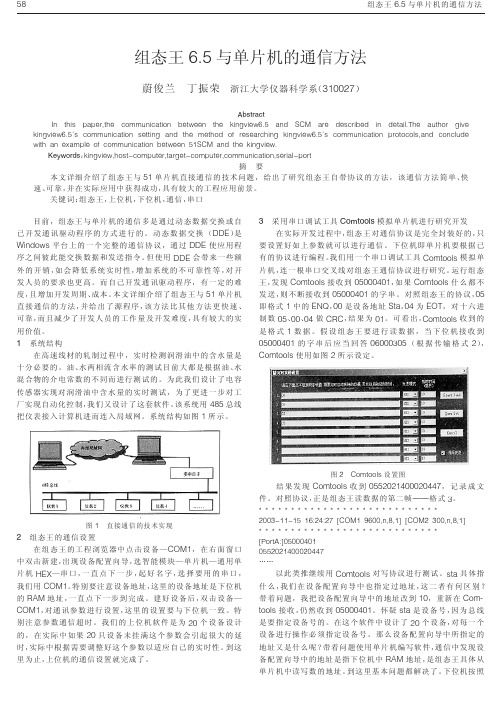
4/;<//=1 设置图
结 果 发 现 4/;<//=1 收 到 &##’&’%2&&&’&22( , 记 录 成 文 —格式 $。 件。对照协议, 正是组态王读数据的第二帧——
图% 直接通信的技术实现
触摸屏与单片机的通讯实现
触摸屏与单片机的通讯实现摘要:在当前的嵌入式设备中,触摸屏作为人机接口得到了广泛的应用。
文章讨论了基于HIT6600触摸屏模块与富士通16位单片机90F340串口通讯实现的软硬件设计。
关键词:HIT6600 90F340 触摸屏单片机1、引言随着后PC 时代的到来,嵌入式系统在信息家电、移动计算设备、网络设备、工业控制和仪器仪表等众多领域中得到了广泛的应用,在这些产品中,触摸屏因方便灵活、节省空间、直观等特点,已经逐渐取代键盘成为嵌入式计算机系统主流的输入设备。
触摸屏输入系统由触摸屏、触摸屏控制器、微控制器及其相应的驱动程序构成。
本文介绍触摸屏控制器与富士通16位单片机90f340串口通讯实现的软硬件设计。
2、触摸屏与单片机的硬件连接采用HIT6600触摸屏与90F340单片机一对多通信。
把触摸屏的COM1 9孔插座与串口通讯的90F340单片机相连接。
注意:通信电缆DB9是1-485的正极、6 -485的负极。
由于是一对多的通讯,所以增加串口通讯芯片MAX1487满足分机负载要求。
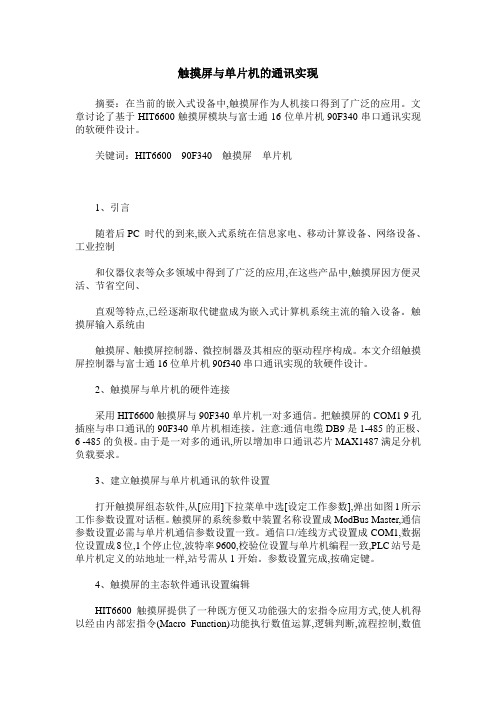
3、建立触摸屏与单片机通讯的软件设置打开触摸屏组态软件,从[应用]下拉菜单中选[设定工作参数],弹出如图1所示工作参数设置对话框。
触摸屏的系统参数中装置名称设置成ModBus Master,通信参数设置必需与单片机通信参数设置一致。
通信口/连线方式设置成COM1,数据位设置成8位,1个停止位,波特率9600,校验位设置与单片机编程一致,PLC站号是单片机定义的站地址一样,站号需从1开始。
参数设置完成,按确定键。
4、触摸屏的主态软件通讯设置编辑HIT6600触摸屏提供了一种既方便又功能强大的宏指令应用方式,使人机得以经由内部宏指令(Macro Function)功能执行数值运算,逻辑判断,流程控制,数值传递,数值转换,计时器计数器,自定通讯指令操作等等,由宏指令的使用可让人机不仅和PLC 连线通讯,同时由另一通讯口来执行同其他通讯设备连线,此功能不仅提供有效的系统整合同时成为最经济便宜的硬件应用架构。
单片机与组态王的通信实例
单片机与组态王的通信组态王(kingView)内置了通用单片机通信模块,这样,我们自己开发的单片机仪表就可以挂接在KingView上了。
因为这样,所以对这个东西有了些兴趣,做了些研究。
(1)研究环境组态王6.53,免费下载,当然有使用限制,不过用于研究是没有问题的。
下载地址:Keil软件,Porteus,这些就不多说了。
Virtual Serial Ports Driver XP 5.1 虚拟串口软件,用此软件可以生成一对相互联接的虚拟串口,这样,初期的研究工作就在电脑上完成了,省得用硬件电路板了。
(2)资料KingView提供了一份简单的说明材料,就在下载后的解压缩文件包中。
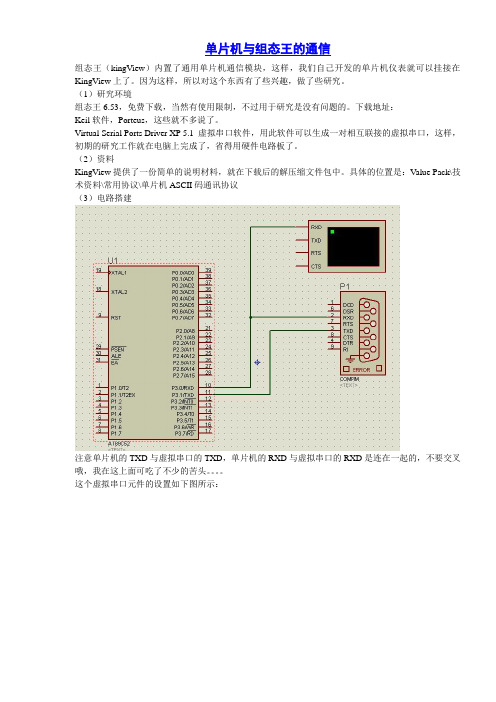
具体的位置是:Value Pack\技术资料\常用协议\单片机ASCII码通讯协议(3)电路搭建注意单片机的TXD与虚拟串口的TXD,单片机的RXD与虚拟串口的RXD是连在一起的,不要交叉哦,我在这上面可吃了不少的苦头。
这个虚拟串口元件的设置如下图所示:说明:这里选COM2,是因为我事先用Vspd生成了一对虚拟串口,com2和com4,至于其他参数则应该选得和kingview中的一致,这个到下面再说。
什么,这个元件不知哪里找?这里啦(4)VSPD的使用现如今的电脑很少有两个串口的了,人呢也是越来越懒了,虽然手边的电路板是现成的,写片子是容易的,但是仍然还是嫌麻烦的,所以就发动狗狗搜一搜,找到了这个VSPD,当然它是很容易用的在first后面选一个串口名,然后在Second后面再选一个串口名,然后点一下Add Pair 就行啦。
怎么选都可以,就算是选com1也是可以的,虽然com1是真实存在的物理串口,但是这个VSPD照样把它给虚拟了。
这里我选的是com2和com4,大家可以看到在左侧的窗口中出现了这样一对互联的串口了,也就是说,我从串口2发数据,然后串口4就能收到。
同样,我从串口4发数据,串口2就能收到。
(5)组态王置根据自己屏幕选择演示项目中的一个找到设备->DDE,双击“新建...”选择:智能模块(上面的图中看不到)->单片机->通用单片机ASCII->串口起个名字,然后选择串口号,我们选择com4这一步选择地址,需要为自己的单片机设备确定一个地址,这有点麻烦。
昆仑通态人机界面与单片机通信实战教程二:脚本驱动的设计
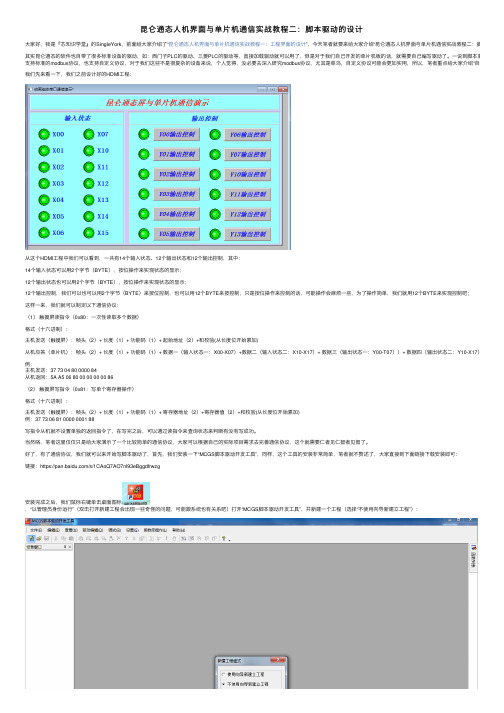
昆仑通态⼈机界⾯与单⽚机通信实战教程⼆:脚本驱动的设计⼤家好,我是『芯知识学堂』的SingleYork,前⾯给⼤家介绍了“昆仑通态⼈机界⾯与单⽚机通信实战教程⼀:⼯程界⾯的设计”,今天笔者就要来给⼤家介绍“昆仑通态⼈机界⾯与单⽚机通信实战教程⼆:脚本驱动的设其实昆仑通态的软件也⾃带了很多标准设备的驱动,如:西门⼦PLC的驱动、三菱PLC的驱动等,直接加载驱动就可以⽤了,但是对于我们⾃⼰开发的单⽚机板的话,就需要⾃⼰编写驱动了。
⼀说到脚本驱动,⾃然就⽀持标准的modbus协议,也⽀持⾃定义协议,对于我们这些不是很复杂的设备来说,个⼈觉得,没必要去深⼊研究modbus协议,尤其是菜鸟,⾃定义协议可能会更加实⽤,所以,笔者重点给⼤家介绍“⾃动义协议”。
我们先来看⼀下,我们之前设计好的HDMI⼯程:从这个HDMI⼯程中我们可以看到,⼀共有14个输⼊状态、12个输出状态和12个输出控制,其中:14个输⼊状态可以⽤2个字节(BYTE),按位操作来实现状态的显⽰;12个输出状态也可以⽤2个字节(BYTE),按位操作来实现状态的显⽰;12个输出控制,我们可以也可以⽤2个字节(BYTE)来按位控制,也可以⽤12个BYTE来按控制,只是按位操作来控制的话,可能操作会⿇烦⼀些,为了操作简单,我们就⽤12个BYTE来实现控制吧;这样⼀来,我们就可以制定以下通信协议:(1)触摸屏读指令(0x80:⼀次性读取多个数据)格式(⼗六进制):主机发送(触摸屏):帧头(2)+ 长度(1)+ 功能码(1)+ 起始地址(2)+和校验(从长度位开始累加)从机应答(单⽚机):帧头(2)+ 长度(1)+ 功能码(1)+ 数据⼀(输⼊状态⼀:X00-X07)+数据⼆(输⼊状态⼆:X10-X17)+ 数据三(输出状态⼀:Y00-T07))+ 数据四(输出状态⼆:Y10-X17)+和校验(从例:主机发送:37 73 04 80 0000 84从机返回:5A A5 06 80 00 00 00 00 86(2)触摸屏写指令(0x81:写单个寄存器操作)格式(⼗六进制):主机发送(触摸屏):帧头(2)+ 长度(1)+ 功能码(1)+ 寄存器地址(2)+寄存器值(2)+和校验(从长度位开始累加)例:37 73 06 81 0000 0001 88写指令从机就不设置单独的返回指令了,在写完之后,可以通过读指令来查询状态来判断有没有写成功。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
组态人机界面与单片机通信案例
很多时候,工业控制或者产品设计方面受到PLC这种功能确定,扩展麻烦,成本昂贵等方面的制约因素,需要独立开发一种特殊功能,但是又需要连接触摸屏通讯,工程师在这个方面往往需要花费很大功夫,现在我要帮大家解决的问题就是单片机与人机界面触摸屏通讯的最简单,最有效的2种方法,其实就是分为2种通讯协议,即工业标准的Modbus RTU协议和工程师自己定义的自由协议。
本实例采用微嵌组态软件,因为公司提供一系列的技术支持和公布单片机源代码,加上公司的人机界面支持自由协议等等先天优势,开发工程方便有效。
方案比较:
方案一modbus—rtu协议:
优点:工业标准通讯协议,具有通用性,,传输数据量大
缺点:需要时间去了解协议的格式和以及按照规定编写通讯程序(需要MODBU S-RTU源代码)
方案二自由协议:
优点:数据格式客户自己定义,灵活多变,定制性强,可以模拟任何已知报文的通讯协议
缺点:传输数据量不大,通用性不强,移植不方便
工程师可以根据以上两种通讯协议的优缺点来选择理想的方案;
新建一个工程文件
型号对应的是公司出产产品型号。
新增一个通信口,微嵌的人机界面有两个通讯口COM1,COM2,这两个串口既可以做RS232,又可以做RS485,通讯协议对应的是单片机工程师需要用到的协议,其中有modbus RTU协议,自由协议Free Protocol,当然还包括西门子S7-200,台达PLC,欧姆龙,三菱等协议,这里我们选择COM1自由协议Free Protocol,通讯速率57600,数据位8,1位停止位,偶校验:
首先我们随便建一个比较简单实用的画面,用位按钮开关控制单片机的指示灯,采集单片机的模拟数据显示在组态软件的数码管(可以通过电脑串口连接单片机在线模拟实际应用)
然后我们要把位按钮的属性绑定到人机界面的系统寄存器,然后再用人机界面内置的宏指令通讯函数output函数把寄存器数据传输给单片机,让单片机接收这个指令之后进行动作控制,方法实现如下:
我们把位按钮1绑定到人机界面系统寄存器LB的第0个里面,再用一个L ED指示灯观察按钮的状态(绑定系统寄存器LB0)
对于数码管显示,属性设置原来差不多,但是需要用input函数将从单片机采集的数据存储到人机界面系统寄存器,再通过宏指令函数映射显示出来,方法如下:
我们将通道一绑定到系统寄存器LD的第1个寄存器,LD是数据寄存器,L B是布尔量的位寄存器,注意两种寄存器的区别。
接下来我们要用到人机界面的组态软件内置的通讯函数,数学运算函数和其他函数了。
由“设定”菜单那里进入到宏指令编辑器进入宏指令编辑:
点击新增,我们写一个宏指令通讯函数,向单片机发送控制指令和接受数据:
具体编程如下:
宏指令test
void Macro_main( )
{
unsigned char dat[4];
unsigned short dat1[4];
int re_dat;
Input( 1, dat, 4, re_dat);
/*如果不明白函数使用,可以点击函数向导按钮查找函数使用说明:
【描述】
第一个参数channel表示通道,如果通道为com1,则channel=1;如果通道为com2,则channel=2,数据类型为int。
第二个参数pString表示写入通道的字符串的地址,数据类型为unsigned char *。
第三个参数count表示字符串中的字符个数,数据类型为int。
第四个参数result表示Output函数运行后返回的结果,如果result大于0,则表示读写有效,数据类型为int。
注意:此函数只能用在freeprotocol(自由协议通道)中。
【用法】
Input(channel,pString,count,result);
【举例】
char srt[9];
int result;
Input(1,str[0],9,result);
dat1[0]=dat[0];
dat1[1]=dat[1];
dat1[2]=dat[2];
dat1[3]=dat[3];
SetWordData(0,1,1,16, dat1[0]);
SetWordData(0,1,2,16, dat1[1]);
SetWordData(0,1,3,16, dat1[2]);
SetWordData(0,1,4,16, dat1[3]);
}
test2:用于发送指令到单片机进行控制,主要用到output函数
static unsigned char key[3];
void Macro_main( )
{
bool key_data[16];
int re_dat;
GetByteData(0, 1,0, 9, 0,key_data);
key[0] = key_data[7]<<7 | key_data[6]<<6 | key_data[5]<<5 | key_dat a[4]<<4 | key_data[3]<<3 | key_data[2]<<2 | key_data[1]<<1 | key_da ta[0];
//key[1]=key_data[15]<<7 | key_data[14]<<6 | key_data[13]<<5 | key_ data[12]<<4 | key_data[11]<<3 | key_data[10]<<2 | key_data[9]<<1 | key_data[8];
key[1]=key_data[8];
Output( 1, key, 2, re_dat);
}
对应单片机下位机的编程,作为单片机开发者应该都知道如何编程了,这里我就提供这个例子的51单片机源代码供大家参考:。