基于可见性预处理的地形模型视相关简化算法
一种地形可视性分析算法的高效实现

A g f ce t g rt m mp e n a i n i ran Vii i t ay i Hi h Ef i n i Al o i h I l me t t Te r i sb l y An l ss o n i
Ha h n , i y n C e u , gNi g nZ e g Wu Q u u , h nL o J i n n f olg f lcrncS ine& E gne ig Nain l nv ri f ee s eh oo y C a gh 1 0 3 C ia C l eo Eeto i ce c e n ie r , t a U iest o D fn eT c n lg , h n sa4 0 7 , hn ) n o y
Viw e
பைடு நூலகம்
0 引 言
地形可视 性分析是地形分 析的重要组成部分 。 可 视 性 分 析 尤 其 是 视 域 分 析 又 是 一 项 非 常 耗 时 的工
成 算法 ,使其能够适用 于大规模 、高分辨率数据条
件 下的 可 视 性 分 析 。
摘 要 :针 对 可视 性 分析在 较 大规 模 数据 和 高分辨 率务 件 下存 在 计算 冗余 和 计 算效 率 不 高的 问题 ,提 出一种 基 于 最 邻近 可视 点 的新 算 法 ,将 其 用 于通视 线 分析 和视 域 分析 ,并 以 实例 对笔 者提 出的改进 算 法 、O 算法 及 A c I A rG S可 视 性 分析模 块 进行 对 比分 析 。实验 结果表 明: 出的新 算 法在 时 间性 能上优 于 可视 性分 析 的基 本算 法和 A c I 提 r S的可 G 视 性分 析模 块 ,并 已成功 应 用 于工程 实际 中。 关键 词 : 地形 可视 性 分析 ;数 字 高程模 型 ; 最邻 近可视 点; 边界 搜 索;通 视 线 ;视域
嵌入式地形三维可视化技术研究与实现
户, 这从根本上改变 了传统 的二维地 理信息 系统 由于基于 抽象 符号而不能给人以 自然界 的本 原感受 的缺 陷 , 为嵌 入式 GS指 I
出了一条新 的发展之路 。
1 三维地形相关技术
11 数字 高程模 型及构 网技 术 .
数字高程模 型 D M是在一 定的地域 范 围内按一定 的规则 E 获取 和记 录 一些 点 的高 程 而 形成 的用 来 描 述 地 形 的数 字 模
情况下 , 用大量 的多边形 面去精 确表示该 物体 是不必要 的。为
直观表达和高效率应用 为一体 的 G S实用平 台 , 开始转 向在 I 并
嵌入式系统上 的应用研究。 结合嵌人式三维 可视化 技术和 数字 高程模 型 ( E 能够 D M) 观地 展 现给 用
o d n r bl n el e ttr n li r a i d b s d o e GL E . r i ay mo i it l g n e mi a s e l e a e n Op n S e i z Ke wo d y rs O e GL E Emb d e 3 e r i Vi aiai n pn S e dd tran D s l t u z o
12 L . oD 技术
0 引 言
随着地理信息系统及嵌 入式 三维可视 化技术 的迅速发 展 ,
三维地理信息系统也已经从最初的 G S辅助模块渐渐发展为集 I
在 复杂模 型的动态显 示中 , 当观察点距某一物体很近 时, 该
物体 的图像 在屏 幕上 占据较 多的像 素点 , 当观察 点距某一 物体 很远时 , 该物体 的图像只能在屏幕上 占据很少 的像素点 , 在这种
Ab ta t s r c A ve ・o e ci p n t o s p o o e a e n s u r o tran v s a i t n S se i w z n l i g meh d i r p s d b s d o q ae fr3 p D e r i iu l a i y tm.T e meh d a h e e iw— e z o h to c ivsve d —
基于层次细节简化和分形的真实感地形生成
中图分类号 : P 9 . T 3 18
t e d t i f v r o e o h r e I h r c s fc n tu to h e al o e y n d ft e t e . n t ep o e so o s r c i n,t e LOD h o y i s d t i l s e h t e r u e o smp i s -
n w wa ie d etevs it f h u fc ac .E p r n a rs l h w a i ag — e yi gv nt j g i bl yo es r e th x ei tl eut s o t t hs lo s ou h i i t a p me s h t
sr c h e ri rm eb s d o h u d r ea is ,a d t e d p st efa tlt e r o g n r t tu tt etr an fa a e n t eq a te tf t n h n a o t h r ca h o y t e e ae r
文献标识码 : A
文章编号 :0 35 6 (0 8 0—0 00 10—0 0 2 0 ) 710 -4
Ge e a i n o e lsi e r i a e n LOD i p iia i n a d f a t l n r to fr a itc tr a n b s d o sm lfc to n r ca
地形分析报告 三种形式
地形分析报告三种形式地形地貌分析地形地貌分析是城市规划中的重要内容,是城市规划的基础分析之一。
地形地貌分析在城市规划的不同时期不同深度中都有非常广泛的应用,从宏观尺度的城市选址、城市布局、功能区组织到微观尺度的道路管网、景观组织无一不受地形地貌的影响,因此,地形地貌分析对城市规划的影响是无处不在的。
长时间以来,城市规划的基础数据通常是平面的地形图数据, 可以在其基础上进行简单的地形分析,近年来随着信息技术尤其是GIS技术的发展, 各种新方法和应用模型不断融入到城市规划领域,传统的地形分析由二维平面分析发展到了新的三维地形分析和三维透视图,从而帮助规划人员根据地形特征进行合理科学的城市规划。
地形分析的基础是要建立数字高程模型(DEM)。
DEM主要用于描述地面起伏状况,可以用于提取各种地形参数,如坡度、坡向等,并进行通视分析等应用分析。
目前DEM的建立主要来源于:①地形图中的等高线;②通过遥感影像提取高程数据;③其它方式,如全球定位系统(GPS)和激光扫描测高系统等。
DEM包括两种表达形式:规则网格(GRID) 和三角网(TIN)。
此外,基于二维平面形式表示的等值线图也可以理解为数字搞成的另一种表达方式。
GRID是由一组大小相同的网格描述地形表面,它能充分表现高程的细节变化,拓扑关系简单,但对于表达不规则的地面特征则略显不协调。
TIN是由分散的地形点按照一定的规则构成的一系列不相交的三角形组成的,与不规则的地面特征和谐一致,可以表示纤细功能特征和叠加任意形状的区域边界。
GRID 常用的生成算法有包括反距离权插值、趋势面插值、样条插值、克里金插值等;TIN 生成算法主要有分割2归并法、逐点插入法和逐步生长法。
城市规划中地形分析的实质就是对DEM的应用范围进行拓广和延伸。
从地形分析的复杂性角度, 可以将地形分析分为两类: 一类是基本地形因子(包括坡度、坡向等)的计算; 另一类是衍生出的其它的地形分析, 包括地形量算、通视分析、地形特征提取等。
多分辨率LOD模型的简化算法
多分辨率LOD模型的简化算法摘要:对HOPPE视区裁剪算法中包围球的建立方法进行了改进,提出一种基于视角变化和LOD技术的视区动态包围球裁剪算法。
使用该算法构造基于TIN 地形的多分辨率LOD模型,避免了节点误判及大量无谓的节点分解计算,提高了实时漫游地形建模速度。
关键词:地形可视化;HOPPE算法;TIN地形;LOD模型;简化1引言地形是人类社会赖以生存并从事一切实践活动的根基。
地形可视化技术是计算机图形学的一个重要应用领域和研究方向,一直是人们的研究热点。
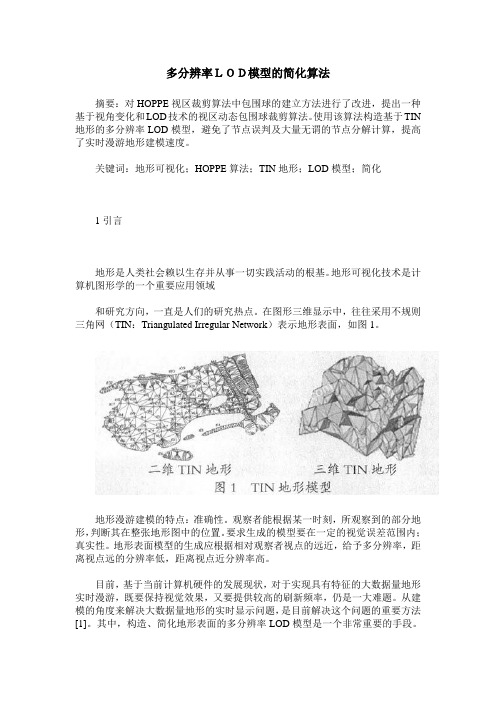
在图形三维显示中,往往采用不规则三角网(TIN:Triangulated Irregular Network)表示地形表面,如图1。
地形漫游建模的特点:准确性。
观察者能根据某一时刻,所观察到的部分地形,判断其在整张地形图中的位置。
要求生成的模型要在一定的视觉误差范围内;真实性。
地形表面模型的生成应根据相对观察者视点的远近,给予多分辨率,距离视点远的分辨率低,距离视点近分辨率高。
目前,基于当前计算机硬件的发展现状,对于实现具有特征的大数据量地形实时漫游,既要保持视觉效果,又要提供较高的刷新频率,仍是一大难题。
从建模的角度来解决大数据量地形的实时显示问题,是目前解决这个问题的重要方法[1]。
其中,构造、简化地形表面的多分辨率LOD模型是一个非常重要的手段。
细节层次模型(Layer of Details,LOD)是一种表达多种不同精度水平的数字高程模型。
LOD技术利用人眼的视觉冗余特性,按照视线方向和距离视点的远近及地物本身的复杂程度不同,对地形场景的不同部分采用不同程度的细节层次进行描述。
这种描述方法,不仅符合人眼的视觉观察特性,更大大的减小的地形绘制过程中需要处理的三角形数量,加速了地形的实时绘制速度。
本文主要对TIN地形进行视区裁剪时,常使用的HOPPE算法进行改进,提出一种基于视角变化和LOD技术的视区动态包围球裁剪算法。
使用该算法构造基于TIN地形的多分辨率LOD模型,避免了节点误判及大量无谓的节点分解计算,提高了实时漫游地形建模速度。
基于ArcGIS和Global Mapper软件实现三维地形可视化与测绘的方法及流程
基于ArcGIS和Global Mapper软件实现三维地形可视化与测绘的方法及流程摘要:科技的进步和人们生活水平的提高,人们对三维地形可视化技术越来越关注,三维地形可视化技术以地形地貌为研究重点对象,在地理信息系统和测绘工程等领域被广泛地应用。
其中用ArcGIS 和Global Mapper软件来实现地形可视化和测绘因为使用方便和技术的可靠性而受到更广泛的关注,本文先介绍了ArcGIS 和Global Mapper软件的特点和优势,然后对运用该软件如何实现三维的地形可视化与测绘方法和流程进行详细的介绍和说明。
关键词:ArcGIS,Global Mapper,三维地形可视化技术,测绘,方法及流程地形可视化在上世纪60年代随着地理信息系统概念的出现而形成。
随后以研究地形地貌为重点的地形三维可视化技术在虚拟现实技术、地理信息系统和测绘工程以及土地管理和气象水文研究等领域应用逐渐广泛,并受到了人们的普遍关注。
科技的发展使我国的测绘作业从传统模式转向综合化信息获取模式。
现在的地形书记获取量与过去相比较已经扩大到了原来的几十倍。
三维地形不仅要精确地进行地形模拟,还要对有效地对大量数据进行管理,实现高精度,快速度,及时性地显示地形数据,所以,在三维可视化中,三维地形的模拟和显示是重点。
一、ArcGIS 和Global Mapper软件(一)ArcGIS软件ArcGIS是有共享的GIS组件构成的通用组件库来实现三维地形可视化的全面GIS平台。
它由三个主要部分构成:1,ArcSDE。
它是一个高级空间数据服务器,在基于多种关系型数据库管理系统下进行地理信息管理。
2,ArcIMS。
它是地图服务器,特点是可伸缩,工作原理是在开放性的Internet 协议的基础上对GIS 地图,数据和元数据进行发布。
3,ArcGIS Server。
它是在企业和Web 框架上建设成的服务端GIS应用和软件共享的对象库,是一个具体的应用服务器。
面向地形数据的点云简化算法
K 邻 域搜 索 。寻 找 任 意 一 点 P 的邻 域 的基 本 流
程 如下 :
1 ) 如果 是根结 点 , 从根结 点 开始搜 索 。
2 ) 如 果 是 叶 子结 点 , 采 用递 归 法返 回所 有 与
点 P邻 近 的点 , 并计 算最 小距 离值 。 3 ) 判 断 是 否 分 割 面 另 一 边 上 有 点 更 接 近 点
特征 , 但是 简化 效率较 低 , 且 对 于特征 简单 和 曲率
好 地保 留点 云特 征 , 首 先 需要 计 算 点 云 数据 的几 何 信息 。点 云几何 信 息是在 点集 拓扑结 构 的基础 上, 通 过 曲面拟合 的方 法计 算得 到 , 点 集 的拓扑 结 构 一般 通过 K— D Tr e e 、 八叉 树等方 法搜 索各 点 K 邻 域 而建立 。点 云数 据 中任 意一 点 P 的 K 邻 域
为到 该点 的欧 氏距 离 最 近 的 K 个 点 所 组 成 的 点
集, K— D T r e e 这 种 数 据 结 构 能 够 很 好 地 提 高 空 间
变化 较小 的 区域 容易 过 度 简 化 , 使得 简化 后 的 点 云数据 出现 分 布不 均 匀 的 现 象 。对 于数 据 量少 、
1 . 1 地 形 数 据 简 化 原 则
交, 分割 面另一 边 上可能 有邻 近点 , 那么 算法 必须 向 P 点所 在 区域 的上 层 区域 回溯 , 从 当前 节 点所 在K — D T r e e 分 支移 动 到另 一 分 支上 去 搜 寻 更 近 点; 如果 不 相 交, 那 么 算 法 继 续 沿 着 当 前 K— D T r e e 分 支运 行 , 当前节 点 的分 割平 面 另 一边 整 个
基于可编程GPU的三维地形场景中树的渲染优化技术
目前 , 提高 三维 场 景绘 制 速 度 比较有 效 的方 法
可归结 以下 几 类 : 细节 层 次 方 法 ( O 、 于 数 L D) 基
据及 可见 性 的预 处 理 方 法 、 于 图像 的绘 制 算 法 。 基 这些 算法 的 传 统 实 现大 都 以 C U为 核 心 展 开 。 随 P 着 高性能 可编 程 G U 的出现 , P P G U进 行 复杂运 算 的 能 力不 断 得 到 加 强 。 因此 , 究 人 员 开 始 将 基 于 研
⑥
2 1 SiT c. nr. 0 2 c. ehE gg
基 于 可编 程 GP 的三 维地 形场 景 中 树 的 U 渲 染 优 化 技 术
韦 婷 黎展 荣 侯 能 孔 令 麒
( 西 大 学 计算 机 与 电子 信 息 学 院 , 宁 50 0 ) 广 南 30 4
摘
要 充分利用 当前高性能可编程 图形硬件特 性及 O e G pn L4的最新 性能, 结合 L D加速技术 , O 采用 多遍绘制技术 , 以及 图
21 0 2年 5月 2 日收 到 2 南 宁 市 科 学 研 究 与技 术 发 展 项 目 (0 0 2 1 ) 助 2 100 0 资
于 图像 的遮挡剔 除 算 法 , 使得 三维 场 景 绘 制 的效 率
得 到 了优 化 。
1 可编程的 G U P
O e G ( pn G a h sLbay 是 一 套 底 层 的 p n L O e rp i irr) c 三维 应 用 程 序 接 口 , p n L 的 着 色 器 语 言 G S O eG LL ( pn L S a i a g ae 的 目的是 提供 硬件 的 可 O e G h d gL n ug ) n 编 程能 力 。从 O e G 2 0开 始 拥 有 专 门处 理 多 边 pn L . 形顶 点 的顶点 着色器 V r xS a e 和专 门处理 像 素 e e hd r t
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第30卷第7期2005年7月武汉大学学报 信息科学版Geo matics and Informat ion Science of W uhan U niver sity V ol.30N o.7July 2005收稿日期:2005 04 29。
项目来源:铁道部科技研究开发计划资助项目(铁建电(2001)11号)。
文章编号:1671 8860(2005)07 0636 04文献标志码:A基于可见性预处理的地形模型视相关简化算法蒲 浩1 宋占峰1(1 中南大学土建学院,长沙市韶山南路22号,410004)摘 要:提出了一种基于可见性预处理的点删除简化算法。
该算法针对海量地形数据,首先建立了高效的空间索引系统,利用这一索引系统快速完成了视锥截取、背面剔除和隐藏面消除等可见性测试,再对预处理后的网格模型依据顶点曲率大小进行点删除简化。
实验表明,采用可见性预处理可大大提高绘制速度,并且绘制帧速率基本独立于模型的复杂度。
关键词:模型简化;视相关简化;细节层次;交互渲染中图法分类号:P283.7;P 208经过多年的研究,国内外已经提出了多种模型简化方法[1~7]。
在众多的简化算法中,累进网格技术可以生成细节层次连续的网格简化模型,而且较易考虑视相关准则,因此成为当前较流行的模型简化方法。
但该方法需要预先为整个场景生成一棵简化操作顶点树,用于记录大量与简化操作相关的正向和逆向信息,对于具有海量数据的地形场景,这将耗费巨大的内存,且简化操作的计算量受原始模型复杂度的影响较大。
因此,本文选择具有较高执行效率的顶点删除简化算法。
1 点删除简化算法的基本原理顶点删除简化算法是一种几何去除算法,它是在候选的顶点序列中,依据某种去除条件依次取出误差代价最小的顶点,将其删除,然后对移去顶点产生的空洞进行局部三角剖分。
重复上述过程,直到满足某些终止条件。
关于去除条件的选择,文献[1]采用了顶点到平均平面的距离,若该距离小于阈值,则删除该顶点,通过调整距离阈值的大小可以生成不同细节层次的简化网格,即LOD 模型。
由于顶点曲率值能代表顶点几何位置的重要性,本文采用了以顶点曲率作为去除条件的办法,依据顶点曲率大小确定出顶点删除操作的优先级。
曲率的计算与顶点的法向锥半角 有关。
值越大,说明顶点周围地形变化越大,顶点处曲率越大; 值越小,说明顶点周围地形越平坦,顶点处曲率越小。
为方便计算,实际计算值取为cos 。
如图1所示。
图1 顶点曲率计算Fig.1 Calculatio n o f the Ver tex Curv atur e删除顶点后的局部三角剖分可采用约束Delaunay 三角剖分算法[8]。
可见,若原三角网满足Delaunay 准则,经过点删除后的简化网格依然能保持这一特性。
经测试,上述方法对于复杂程度不高的单个模型能起到较好的简化作用,但对于具有海量数据的大规模地形场景漫游,若不加任何处理,直接采用上述算法,由于简化准则中仅考虑了地形特征(曲率),则不仅计算量大,而且简化效果也不理想,难以满足实时绘制的需要。
为此,本文提出了先应用视相关准则进行可见性预处理,再对预处理后的网格进行二次简化的方法。
为了快速完成预处理,笔者针对海量数据建立了高效的网格 点 三角形的空间对象索引。
第30卷第7期蒲 浩等:基于可见性预处理的地形模型视相关简化算法2 空间对象索引空间对象索引是依据空间对象所在的位置及分布特征,按一定顺序编排的数据结构,该结构中包含有空间对象的标识和定位该对象的内容信息。
而空间对象检索则是依据所设计的空间对象索引在数据库中找出符合条件的一种数据操作。
空间对象检索方式很多,对地形模型的简化而言,主要是空间位置信息的查找,如快速查找共享某个顶点的三角形集合,包含给定点的三角形等。
为此,笔者建立了网格 散点 三角形的索引机制,原理如下。
1)为地形点建立网格索引设点集V中有N个离散点,对V进行多级网格划分,使得叶子网格中的点不大于阈值log2N,网格的宽度逐级减小,如图2所示。
多级自适应网格划分点集的优点在于:嵌套深度浅,耗费空间小,点集划分速度快,时间复杂度为0 (N),便于点及三角网的管理等。
本文采用多叉树的数据结构模拟多级自适应网格,经过多级自适应网格划分点集后,数据点已被离散到各个叶子网格中,并且由叶子网格将这些数据点管理起来。
每一叶子网格中记录了第一个落入该网格中的数据点号,而其余落在该网格的数据点通过点结构中的N ex tPtNo!指针以链表方式连接。
图2 多级网格自适应划分F ig.2 Cr eating Self adaptiv e M ulti levelG rids2)为三角形建立点索引在将地形点投入相应网格,建立网格索引的同时,每个数据点通过点结构中的三角形指针分别记录一个以该点为顶点的三角形,这些记录在逐点删除的过程中,随着网形的变化会动态更新。
通过这一索引系统,可建立起网格 散点 三角形之间的空间映射关系,如图3所示。
借助这种映射,可方便快捷地检索出给定点附近的顶点集及三角形集合等拓扑信息,为快速完成可见性预处理奠定了基础。
图3 网格 散点 三角形空间索引Fig.3 Space Index of G rid V ertex T r iangle3 算法描述算法包括可见性预处理和基于曲率的点删除简化两部分。
3.1 可见性预处理可见性预处理是依据视锥准则、背面剔除准则和屏幕投影误差准则,从原始网格模型中快速搜索出当前的视相关网格和点集,从而大幅度减少后续的简化计算量。
3.1.1 视锥截取地形三维场景虽然具有较高的复杂度,但在视点给定的情况下,人的视域范围是有限的,因此,有必要先依据视见体的大小从原始点集中挑选出与当前视点相关的结点,本文将其称为活动结点,后续的计算及简化操作只针对活动结点进行,这将显著减少模型简化的计算量。
视见体是一个由6个面组成的锥体,6个面的方程可根据给定的视点坐标和视锥张角求出。
根据给定点与视见体的关系,可以将其划分为三类:可见点、部分可见点和不可见点。
637武汉大学学报 信息科学版2005年7月按照上述划分易知,需要参与后续简化计算的点包括可见点和部分可见点,它们构成了活动结点集合。
精确计算出活动结点集,需要逐点判断其与视见体的关系,计算量颇大。
本文研究了一种快速查找算法,无需遍历整个原始点集或三角形集,可快速完成活动结点的查找操作。
步骤如下:∀将视见体投影到x y 平面上得#T;∃在原始网格中找出#T 三边切割的所有三角形,并将它们的属性赋为边界三角形;%利用网格 散点 三角形的索引机制,快速定位包含#T 的重心的三角形#S;&以#S 为初始三角形,根据其记录的邻接三角形信息迅速向外扩展,直到边界三角形。
如此,可查找出位于视见体内及其与视见体边界相交的所有三角形集合,本文称之为活动三角形集合,其中所有三角形的顶点构成了活动结点集合P 。
3.1.2 背面剔除活动三角形集合中的三角形相当一部分对于观察者来说是不可见的,因为被其他的三角形面遮挡住了,应以尽可能粗的分辨率显示。
对于顶点v ∋P,若它关联的法向锥是背向的,则对顶点v 进行删除。
如图4所示,给出标准化点法向量n v ,法向锥半角 ,视点e 到v 的矢量ev 以及n v 与ev 的夹角 ,如果<90- cos >cos (90- ) co s >sin 成立,则法向锥是背离观察者的,该点应删除。
式中,cos =n v (ev) |ev |。
图4 背离面简化准则F ig.4 Cr iteria of Cull face3.1.3 屏幕投影误差当三角形面离视点很远时,在屏幕内的投影区域很小。
为提高渲染效率,网格简化可以移去相对于给定阈值 在屏幕上足够小的三角形,这样处理对视觉效果没有影响。
可以利用结点v 的包围球半径r 、法向锥半角 和顶点标准法向量n v 来计算影响域在屏幕上的可见区域,其中,r 为与顶点v 关联的一系列边中的最大边长,如图5所示,包围球投影到距视点为d 的视平面上的投影面积限制在cos ( - )!r 2d 2|ev |2范围内。
图5 屏幕投影误差准则F ig.5 Criter ia of Scr een space P roject ionErro r T hr esho ld由该式计算投影面积要计算 的确切值,耗费时间。
为节省时间,通过co s ( - )(co s +sin ,对于 (90), ∗ ,则投影面积限制在式(1)范围内:(cos +sin )!r 2d 2|ev |2(1)对于 < ,令cos +sin =1,若式(1)的计算值小于给定的阈值 时,则对应的结点v 可以删除。
3.2 基于曲率的简化网格的生成对于经可见性预处理后的网格,本文采用了基于曲率的局部删除顶点简化算法。
步骤如下:∀针对网格中的每一个顶点计算曲率;∃根据曲率大小对所有顶点从小到大排序,存储在一个顶点队列中;%在顶点队列中,删除一个曲率最小的顶点,并对删除后留下的 空洞!重新三角化;&对该点的星形邻域上的各顶点重新计算曲率,并根据新的计算结果调整其在顶点队列中的排序,以保证误差值的递增排序;+返回步骤%,直到满足给定的三角形数量。
4 应用根据上述算法原理,用V C ++6.0和OpenGL 开发了地形实时动态显示系统,用户可以在该系统中通过改变视点、视线方向、视见体以及屏幕投影误差来观察模型,系统还提供了记录观察路径和按指定路径漫游的功能。
图6为某实际地形漫游时截取的画面,原始网格共有225416个三角形,经本文算法简化后,在普通微机上可以实现交互式的动态实时漫游。
实验环境为P42.6G 微机,256MB 内存,GeForce 128M 显示卡,80G 硬盘,Window s XP 操作系统。
表1列出了分别采用三种方法(不使用简化、未加可见性预处理的点删除简化和加可见性预处理的点删除简化)沿固定路径漫游后对绘制帧速率的统计数据。
可以看出,如果不对模型进行预处理简化,而直接使用点删除简化算法,那么绘制速度的提高是有限的。
加上预处理简化后,绘制速度大大提高了,完全可以满足实时绘制的需要,并且绘制帧速率基本独立于场景的复杂度。
638第30卷第7期蒲 浩等:基于可见性预处理的地形模型视相关简化算法图6 地形实时动态显示Fig.6 Real time Render ing o f a Lar ge Scaleo f T err ain Scene表1 绘制帧速率T ab.1 F rame V elo city o f Rendering三角形总数/个漫游帧数/帧不使用简化的帧速率/帧 s-1未使用预处理简化的帧速率/帧 s-1使用预处理简化的帧速率/帧 s-1975036720.838.8122.421880594280.36 5.6321.148924153130.08 3.4121.11 177********.02 1.0320.92参 考 文 献1 Schroeder W J.Decimation o f T riang le M puter Gra phics,1992,26(2):65~702 T ur k G.Re t iling Sur puter Gr aphics,1992,26(2):55~643 H oppe H,DeRo se T.M esh O puterG raphics,1993,27:19~644 G arland M,H eckber t P S.Surface Simplificatio n Using Quadric Err or M et puter G raphics, 1997,31:209~2165 H oppe H.View dependent Refinement of P ro gr essiv eM puter Gr aphics,1997,31:189~1986 张建保,杨 涛,孙济舟.基于顶点删除算法的连续多分辨率模型显示.中国图像图形学报,1999,4(5): 395~3997 周 昆,潘志庚,石教英.基于三角形折叠的网格简化算法.计算机学报,1998,21(6):506~5138 蒲 浩,宋占峰,詹振炎.基于Delaunay三角网的路线三维建模方法研究.铁道学报,2001,23(4):81~ 869 W atso n D puting the n dimensional D elaunayT esselation w ith A pplication to Vo ro no i Po ly copes.Coputer Journal,1981(24):167~172第一作者简介:蒲浩,博士后,副教授。