脉冲输出控制步进电机接线
步进电机接线图
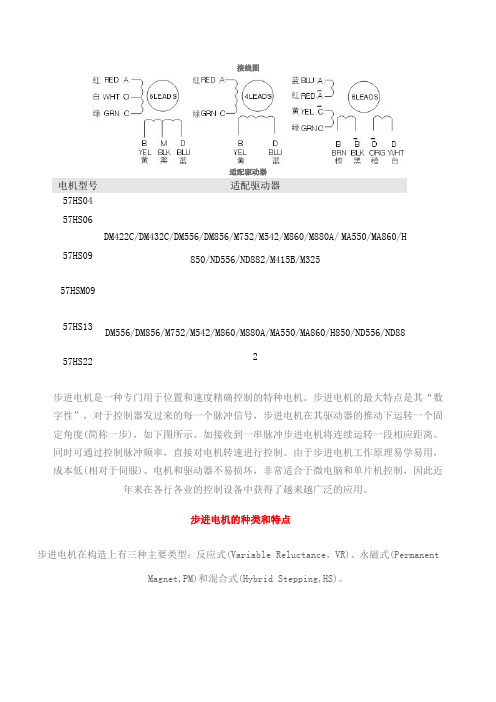
接线图适配驱动器电机型号 适配驱动器57HS04 DM422C/DM432C/DM556/DM856/M752/M542/M860/M880A/ MA550/MA860/H850/ND556/ND882/M415B/M32557HS0657HS0957HSM0957HS13DM556/DM856/M752/M542/M860/M880A/MA550/MA860/H850/ND556/ND88257HS22步进电机是一种专门用于位置和速度精确控制的特种电机。
步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。
如接收到一串脉冲步进电机将连续运转一段相应距离。
同时可通过控制脉冲频率,直接对电机转速进行控制。
由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。
步进电机的种类和特点步进电机在构造上有三种主要类型:反应式(Variable Reluctance ,VR)、永磁式(PermanentMagnet,PM)和混合式(Hybrid Stepping,HS)。
* 反应式定子上有绕组、转子由软磁材料组成。
结构简单、成本低、步距角小,可达°、但动态性能差、效率低、发热大,可靠性难保证。
* 永磁式永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。
其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为°或15°)。
* 混合式混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。
其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。
按定子上绕组来分,共有二相、三相和五相等系列。
最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。
s7-200步进电机控制s-200步进电机控制s7-200步进电机控制s7-200步进电机控制

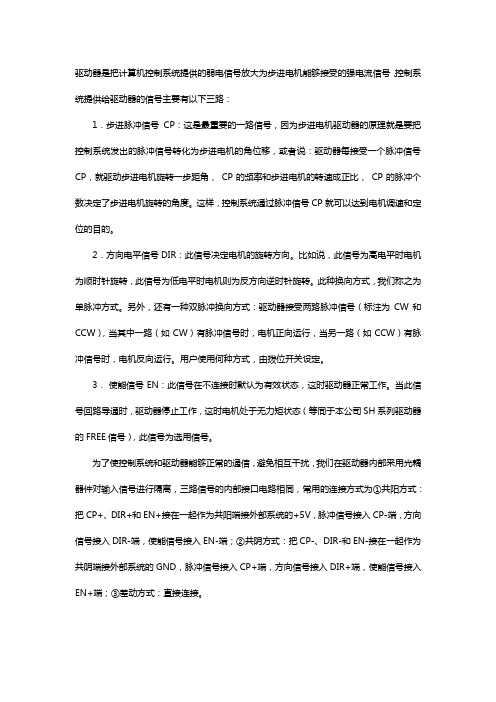
PTOx_RUN子程序(运行轮廓)
• PTOx_RUN子程序(运行轮廓)命 令PLC执行存储于配置/轮廓表的 特定轮廓中的运动操作。开启EN位 会启用此子程序。在懲瓿蓲位发出 子程序执行已经完成的信号前,请 确定EN位保持开启。
• 现在比较常用的步进电机包括反应式步进电机(VR)、 永磁式步进电机(PM)、混合式步进电机(HB)和单相 式步进电机等。
• 电机固有步距角:
• 它表示控制系统每发一个步进脉冲信号,电机所 转动的角度。电机出厂时给出了一个步距角的值 。
• 如86BYG250A型电机给出的值为0.9°/1.8°(表 示半步工作时为0.9°、整步工作时为1.8°), 这个步距角可以称之为‘电机固有步距角’,它 不一定是电机实际工作时的真正步距角,真正的 步距角和驱动器有关。
• Error(错误)参数包含本子程序的结果。 如果PTO向导的HSC计数器功能已启用, C_Pos参数包含用脉冲数目表示的模块; 否则此数值始终为零。
编程
运行。 • 脉宽时间 = 0 占空比为0%:输出关闭。 • 周期 < 2个时间单位 周期的默认值为两个时间单
位。
• PTO操作
• PTO为指定的脉冲数和指定的周期提供方 波(50%占空比)输出。PTO可提供单脉冲 串或多脉冲串(使用脉冲轮廓)。您指定 脉冲数和周期(以微秒或毫秒递增)。
• 周期范围从10微秒至65,535微秒或从2毫秒 至65,535毫秒。
产生一个高速脉冲串或一个脉冲调制波形。 • Q0.0 • Q0.1
• 当Q0.0/Q0.1作为高速输出点使用时,其普 通输出点禁用,反之。
用PLC控制步进电机的相关指令说明

用PLC控制步进电机的相关指令下面介绍的指令只适用于FX1S、FX1N系列的晶体管输出PLC,如高训的FX1N-60MT。
这些指令主要是针对用PLC直接联动伺服放大器,目的是可以不借助其他扩展设备(例如1GM模块)来进行简单的点位控制,使用这些指令时最好配合三菱的伺服放大器(如MR-J2)。
然而,我们也可以用这些指令来控制步进电机的运行,如高训810室的实验台架。
下面我们来了解相关指令的用法:1、脉冲输出指令PLSY(FNC57)PLSY指令用于产生指定数量的脉冲。
助记法为HZ、数目Y出来。
指令执行如下:2、带加减速的脉冲输出指令PLSR(FNC59)3、回原点ZRN(FNC156)--------重点撑握ZRN指令用于校准机械原点。
助记法为高速、减速至原点。
指令执行如下:4、增量驱动DRVI(FNC158)--------重点撑握DRVI为单速增量驱动方式脉冲输出指令。
这个指令与脉冲输出指令类似但又有区别,只是根据数据脉冲的正负多了个转向输出。
本指令执行如下:5、绝对位置驱动指令DRVA(FNC159)本指令与DRVI增量驱动形式与数值上基本一样,唯一不同之处在于[S1.]:在增量驱动中,[S1.]指定的是距离,也就是想要发送的脉冲数;而在绝对位置驱动指令中,[S1.]定义的是目标位置与原点间的距离,即目标的绝对位置。
下面以高训810室的设备为例,说明步进电机的驱动方法:在用步进电机之前,请学员考虑一下几个相关的问题:1、何谓步进电机的步距角?何为整步、半步?何谓步进电机的细分数?2、用步进电机拖动丝杆移动一定的距离,其脉冲数是如何估算的?3、在步进顺控中运用点位指令应注意什么?(切断电源的先后问题!)步进电机测试程序与接线如下:1、按下启动按钮,丝杆回原点,5秒钟后向中间移动,2秒后回到原点。
注:高训810步进电机正数为后退,Y2亮,负数为向前,Y2不亮。
向前方为向(3#带侧)运动为,向后为向(1#带侧)运动。
步进电机驱动器控制信号接口说明
...步进电机驱动器控制信号接口说明驱动器是把计算机控制系统提供的弱电信号放大为步进电机能够接受的强电流信号,控制系统提供给驱动器的信号主要有以下三路: 1.步进脉冲信号CP:这是最重要的一路信号,因为步进电机驱动器的原理就是要把控制系统发出的脉冲信号转化为步进电机的角位移,或者说:驱动器每接受一个脉冲信号CP,就驱动步进电机旋转一步距角, CP的频率和步进电机的转速成正比, CP的脉冲个数决定了步进电机旋转的角度。
这样,控制系统通过脉冲信号CP就可以达到电机调速和定位的目的。
2.方向电平信号DIR:此信号决定电机的旋转方向。
比如说,此信号为高电平时电机为顺时针旋转,此信号为低电平时电机则为反方向逆时针旋转。
此种换向方式,我们称之为单脉冲方式。
另外,还有一种双脉冲换向方式:驱动器接受两路脉冲信号(标注为CW和CCW),当其中一路(如CW)有脉冲信号时,电机正向运行,当另一路(如CCW)有脉冲信号时,电机反向运行。
用户使用何种方式,由拨位开关设定。
3.使能信号EN:此信号在不连接时默认为有效状态,这时驱动器正常工作。
当此信号回路导通时,驱动器停止工作,这时电机处于无力矩状态(等同于本公司SH系列驱动器的FREE信号),此信号为选用信号。
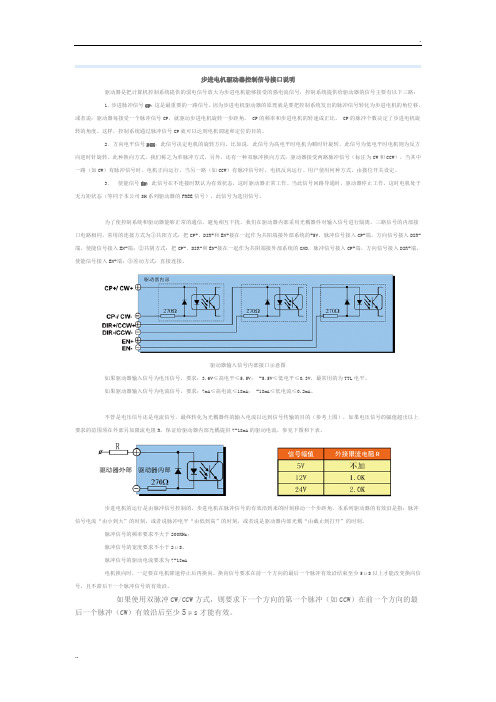
为了使控制系统和驱动器能够正常的通信,避免相互干扰,我们在驱动器内部采用光耦器件对输入信号进行隔离,三路信号的内部接口电路相同,常用的连接方式为①共阳方式:把CP+、DIR+和EN+接在一起作为共阳端接外部系统的+5V,脉冲信号接入CP-端,方向信号接入DIR-端,使能信号接入EN-端;②共阴方式:把CP-、DIR-和EN-接在一起作为共阴端接外部系统的GND,脉冲信号接入CP+端,方向信号接入DIR+端,使能信号接入EN+端;③差动方式:直接连接。
驱动器输入信号内部接口示意图如果驱动器输入信号为电压信号,要求:3.6V≤高电平≤5.5V; -5.5V≤低电平≤0.3V,最常用的为TTL电平。
PLC的脉冲输出控制步进电机的实用方法
断电复位方可有效。 步进电机的型号是86BYG402,其相电流选4A,拨位
开关1 2 3 4设定值为1111。细分数根据实际应用的精度 要求来选取。
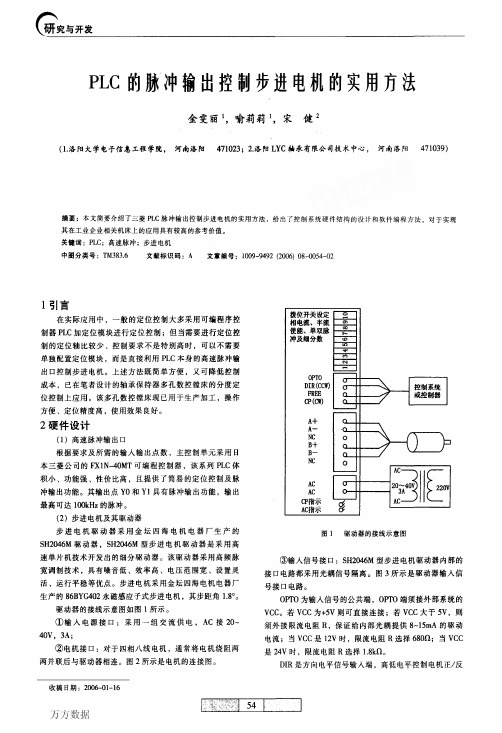
(3)PLC与步进电机驱动器的硬件连接 可编程序控制器PLC与步进电机驱动器的连接如图4
2.期刊论文 胡佳丽.闫宝瑞.张安震.李庆春.何亚东.信春玲 S7-200 PLC在伺服电机位置控制中的应用 -自动化仪
表2009,30(12)
为了探究如何更方便、准确地实现位置控制,确保其位置控制的精度,探讨了基于西门子S7-200系列PLC和Copley系列伺服系统的位置控制方法.通过 介绍系统软硬件构成及其特点,详细论述了PLC系统通过高速脉冲输出、EM253位置控制模块以及自由口通信这三种方式控制伺服电机,以实现绝对运动、 相对运动等;同时对它们进行了一系列的比较.实验证明,三种控制方式各有其不同的应用场合,对类似的工业控制具有一定的借鉴参考意义.
1234 1000 100l 1010 1011 1100 1101 11lO 1111
相电流 2.25A 2.50A 2.75A 3.OOA 3.25A 3.50A 3.75A 4.00A
表2 细分设定【位7 8 9 10)
7 8 9 10 0000 0001 oolO 0011 0100 0101 0110 0111
在图4中将可编程序控制器的脉冲输出端yo的公共端como和输出点y10的公共端com4皆与可编程序控表1相电流设定i位12341234相电流1234相电流0000025a1000225a0001050a100l250a0010075a1010275a00111ooa10113ooa0100125a1100325a0101150a1101350a0110175a11lo375a01112ooa1111400a表2细分设定位7891078910细分数789lo细分数0000110001800012100l20oolo410lo32001151011400100611005001018110l01101011101280111161111256制器的24v地即com相连步进电机驱动器的输入信号公共端与可编程序控制器plc的24v电源相连plc的脉冲输出端yo外接18k的限流电阻连接至步进脉冲输入信号cpplc的输出点y10用于控制步进电机的旋转方wc咖024vsh204硼步进电机驱动器fxlhomtc删0ptp18置yot一c卜一cp18置y10dir图4plc与步进电机驱动器的连接向外接18k的限流电阻连接至方向电平输入端dir
步进电机驱动器控制信号接口说明【详】
驱动器是把计算机控制系统提供的弱电信号放大为步进电机能够接受的强电流信号,控制系统提供给驱动器的信号主要有以下三路:1.步进脉冲信号CP:这是最重要的一路信号,因为步进电机驱动器的原理就是要把控制系统发出的脉冲信号转化为步进电机的角位移,或者说:驱动器每接受一个脉冲信号CP,就驱动步进电机旋转一步距角,CP的频率和步进电机的转速成正比,CP的脉冲个数决定了步进电机旋转的角度。
这样,控制系统通过脉冲信号CP就可以达到电机调速和定位的目的。
2.方向电平信号DIR:此信号决定电机的旋转方向。
比如说,此信号为高电平时电机为顺时针旋转,此信号为低电平时电机则为反方向逆时针旋转。
此种换向方式,我们称之为单脉冲方式。
另外,还有一种双脉冲换向方式:驱动器接受两路脉冲信号(标注为CW和CCW),当其中一路(如CW)有脉冲信号时,电机正向运行,当另一路(如CCW)有脉冲信号时,电机反向运行。
用户使用何种方式,由拨位开关设定。
3.使能信号EN:此信号在不连接时默认为有效状态,这时驱动器正常工作。
当此信号回路导通时,驱动器停止工作,这时电机处于无力矩状态(等同于本公司SH系列驱动器的FREE信号),此信号为选用信号。
为了使控制系统和驱动器能够正常的通信,避免相互干扰,我们在驱动器内部采用光耦器件对输入信号进行隔离,三路信号的内部接口电路相同,常用的连接方式为①共阳方式:把CP+、DIR+和EN+接在一起作为共阳端接外部系统的+5V,脉冲信号接入CP-端,方向信号接入DIR-端,使能信号接入EN-端;②共阴方式:把CP-、DIR-和EN-接在一起作为共阴端接外部系统的GND,脉冲信号接入CP+端,方向信号接入DIR+端,使能信号接入EN+端;③差动方式:直接连接。
驱动器输入信号内部接口示意图如果驱动器输入信号为电压信号,要求:3.6V≤高电平≤5.5V;-5.5V≤低电平≤0.3V,最常用的为TTL电平。
如果驱动器输入信号为电流信号,要求:7mA≤高电流≤18mA;-18mA≤低电流≤0.2mA。
步进电机原理接线

2相四线,四相五线,四相六线步进电机接线及驱动方法分类:单片机2010-07-18 09:24 5085人阅读评论(9) 收藏举报步进电机原理按照常理来说,步进电机接线要根据线的颜色来区分接线。
但是不同公司生产的步进电机,线的颜色不一样。
特别是国外的步进电机。
那么,步进电机接线应该用万用表打表。
步进电机内部构造如下图:通过上图可知,A,~A是联通的,B和~B是联通。
那么,A和~A是一组a,B和~B是一组b。
不管是两相四相,四相五线,四相六线步进电机。
内部构造都是如此。
至于究竟是四线,五线,还是六线。
就要看A和~A之间,B和B~之间有没有公共端com抽线。
如果a组和b组各自有一个com端,则该步进电机六线,如果a和b组的公共端连在一起,则是5线的。
所以,要弄清步进电机如何接线,只需把a组和b组分开。
用万用表打。
四线:由于四线没有com公共抽线,所以,a和b组是绝对绝缘的,不连通的。
所以,用万用表测,不连通的是一组。
五线:由于五线中,a和b组的公共端是连接在一起的。
用万用表测,当发现有一根线和其他几根线的电阻是相当的,那么,这根线就是公共com端。
对于驱动五线步进电机,公共com端不连接也是可以驱动步进电机的。
六线:a和b组的公共抽线com端是不连通的。
同样,用万用表测电阻,发现其中一根线和其他两根线阻止是一样的,那么这根线是com端,另2根线就属于一组。
对于驱动四相六线步进电机,两根公共com端不接先也可以驱动该步进电机的。
步进电机相关概念相数:产生不同对极N、S磁场的激磁线圈对数。
常用m表示。
拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A.步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。
θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。
PLC高速脉冲输出控制步进电机

PLC高速脉冲输出控制步进电机1. 背景介绍步进电机是一种常见的电动机类型,它具有精准的位置控制和高速运动的特点。
在很多工业自动化应用中,步进电机常常需要与PLC(可编程逻辑控制器)配合使用,以实现精准的位置控制和高速脉冲输出。
本文档将介绍如何通过PLC实现高速脉冲输出控制步进电机的方法和步骤。
2. 所需材料在开始之前,我们需要准备以下材料:•PLC控制器•步进电机驱动器•步进电机•连接线•电源请确保以上材料齐全并符合各自的规格要求。
3. PLC高速脉冲输出控制步进电机的步骤步骤一:连接电源和PLC控制器首先,将电源连接到PLC控制器上。
确保电源的电压和PLC控制器的额定电压匹配。
然后将PLC控制器的电源线连接到电源上,并确保连接牢固。
步骤二:连接步进电机驱动器和PLC控制器将步进电机驱动器的电源线连接到电源上,并确保连接牢固。
然后,将步进电机驱动器的控制线连接到PLC控制器上,确保连接正确。
步骤三:连接步进电机和步进电机驱动器将步进电机的线束连接到步进电机驱动器上,确保连接正确。
根据步进电机的规格要求,选择正确的接线方法。
步骤四:PLC编程在PLC编程软件中进行编程,以实现高速脉冲输出控制步进电机。
以下是一个简单的PLC编程示例:BEGINVARmotor_output: BOOL := FALSE; -- 步进电机控制信号pulse_delay: TIME := T#10MS; -- 脉冲延迟时间,控制步进电机的速度END_VAR-- 主程序WHILE TRUE DO-- 输出一个脉冲信号控制步进电机运动motor_output := NOT motor_output;DELAY pulse_delay; -- 延迟一段时间,控制步进电机的速度END_WHILE;END;以上的PLC程序实现了一个简单的高速脉冲输出控制步进电机的功能。
在主程序中,通过循环不断地输出一个脉冲信号来控制步进电机的运动,同时通过调整延迟时间来控制步进电机的速度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无论时隔多久,我依然清楚的记着,那些年,我们曾拥有的美好。依稀记
信号的高端为公用端,与控制器的 24V 共用一个 电源,因此,Y1 和 Y2 的输出端与驱动器的输入 端之间必须串联两支 2K 欧姆的限流电阻。 注意:Y1 和 Y2 连接步进电机驱动器时必须 加接 2K 的限流电阻,参见下图,否则会损坏驱
电压或电流信号,通常将两组信号的高端并联接 到供电电压的正极,控制器输出信号接到信号的 低端(负极)。 一般驱动器输入信号为 5V,需要一个 5V 的 电源来供电,如果没有 5V 的电源就要增加供电
的复杂性。现在介绍一种可以与控制器供电共用 24V 电源的接线方法,将脉冲 PU 和方向 DR 两组 输入信号的高端并联接到 24V 正极,控制器的输 出信号通过串联 2K 电阻接到驱动器,具体接线 参见下图:
脉冲输出接线 单轴步进电机控制:参见图中的 Y1 作为脉 冲输出端,Y2 作为脉冲输出端,图中有控制器的 脉冲输出端与步进电机驱动器的具体接线原理, 脉冲输出端 Y1 连接步进电机驱动器的 PU 端,方
向控制端 Y2 连接 DR 端。驱动器必须设置为脉冲 +方向的方式,PU 端为脉冲方式,DR 端为方向控 制端。控制器的地线 EG 与驱动器的电源负极-V 相连,控制器的供电为 24V,步进电机驱动器的 电源则根据不同厂家及型号、遵照其说明书要求 连接所需的电源。图中,步进电机驱动器的输入
1ci0f6c7b 易博/
无论时隔多久,我依然清楚的记着,那些年,我们曾拥有的美好。依稀记
动器。 多轴步进电机控制: 多轴步进电机控制采用具有多路脉冲输出 的控制器,需要多轴控制的需要时选择多轴控制 器。多轴步进控制与单轴控制原理相那些年,我们曾拥有的美好。依稀记
图,图中是两轴步进控制原理图,X 轴由 Y1 输出 脉冲,Y2 作为方向控制端,Y 轴由 Y3 输出脉冲, Y4 作为方向控制端。 两轴步进控制接线原理图
控制器分别输出脉冲和方向信号到 2 台步进
电机驱动器,驱动器直接控制步进电机。由于控 制器是通过驱动器控制步进电机,可以控制各种 不同品种、型号和不同功率大小的步进电机。 一般驱动器有脉冲 PU 和方向 DR 两组输入信 号,这两组信号都有正负极性之分,并需要供给
无论时隔多久,我依然清楚的记着,那些年,我们曾拥有的美好。依稀记