典型的红外搜索跟踪系统_李秀春
红外搜索跟踪系统模型设计及军事侦查中的应用分析

因此 , 它可 以 用 无 源 的 机 动 飞 行分 辨 面 积 和 位 置 进 行 详 细 分 析 , 不 断 满 足 实 际 处理计算 机 、 接 口电 路 以 及 滤 波 器 等 组 成 较 高 , 可 以 透 过 烟 雾 探 看 作 战 要 求 , 对 传 感 器而 言 , 轨 迹 面 积 的 值便 是 其 的, 其 任务 是 获 取 和 跟 踪 目标 对 象 , 并 对 相 距 离 速 率 和 距 离 , 关数据进行处理。 稳 定与 瞄 准 系统 : 该 系统 地 区 的 情 况 , 进 而 可 以 更 好 地 进 行 低 空 防 最 为关 键 的 参 数 , 在 此 基础 上 , 要 对 探测 器 的 投影 情况 进 行分 析 , 得 到 其 在地 面上的 最 进 而为 系统 设 计提 供依 据 , 最 终 红 外 搜 索 跟 踪 系统 的 应 用 原 理 较 为 简 低 点投 影 , 通常是 借助红 外 探测 器, 且 此 探 测 器 决定 其 技 术要 求 。 况, 稳定其瞄准线, 并控制搜索视场、 光 学 视 单 , 其 方 位 扫 描 和 轴等。 红 外 热 系统 : 该 系统 由3 个部分组成, 分 是 以 垂 直 线 列 形 式 工 作 的 , 前 者 角 度 大 小 为 3 结 语 别为 电子 信 号处 理 组件、 探测 器以及红 外 成像 扫 描 视 场 皆 成 一 个 角 度 ,
宁成达 田春艳 蓝志环 ( 空军航 空大学作战指挥系 吉林长春 1 3 0 0 2 2 ) 摘 要 : 虹外搜 索跟踪 系统是以被 动方式工作 的, 具有隐蔽性好 精度 高以及低 空探 测性 能好等优点。 同时, 它还具备 角 度分 辨串高, 可进行全
天候探 测, 可在 不同环境和视场角下搜索和跟踪 多个 目标等特点。 该文从模 型设计出发, 重点分析在军事侦察中的应用。
一种低空红外目标精确定位方法及系统[发明专利]
![一种低空红外目标精确定位方法及系统[发明专利]](https://img.taocdn.com/s3/m/7321802a2379168884868762caaedd3382c4b57d.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 202010862229.1(22)申请日 2020.08.25(71)申请人 西安空天能源动力智能制造研究院有限公司地址 710100 陕西省西安市国家民用航天产业基地航天中路385号众创广场三楼303-306室(72)发明人 邰会强 隋永华 张百灵 (74)专利代理机构 北京科家知识产权代理事务所(普通合伙) 11427代理人 王营超(51)Int.Cl.G01S 11/12(2006.01)(54)发明名称一种低空红外目标精确定位方法及系统(57)摘要本发明提供了一种低空红外目标精确定位方法及系统,首先系统在工作前,完成站点布设,以各站点的大地经纬度坐标为输入条件,通过坐标转换算法,将各站点坐标统一到大地直角坐标系下;系统在工作时,根据转台获取的目标方位角和俯仰角信息,通过最小距离算法,得到目标相对于各站的距离信息,以假关联滤除算法为基础,设定“门限”,剔除假目标,降低虚警率;最后,通过多站解算融合算法,对目标相对于各站点的距离信息进行加权融合,提高测距精度。
本发明可以判别虚假目标,适用于多目标的检测和定位;同时考虑地球曲率引入的误差,减少了不必要的测量误差。
权利要求书4页 说明书10页 附图5页CN 111913171 A 2020.11.10C N 111913171A1.一种低空红外目标精确定位方法,其特征在于,包括以下步骤:S1:站点布设先读取各站点的大地坐标系坐标,完成对各站点进行布设;S2:站点坐标转换通过坐标转换算法,将站点所处位置的大地坐标系坐标转换成以地心为原点的大地直角坐标系坐标;S3:最小距离定位算法由已知的两站坐标值和两站光电搜索装置在同一时刻探测同一目标时的方位角、俯仰角,建立两站交叉测距的数学模型,利用最小距离定位算法获取目标的距离信息;S4:假点剔除根据当前时刻两站观测线最小距离和上一时刻两站观测线最小距离的前后起伏,判断目标观测线上的两点是否正确关联;若两点是虚假关联点,予以剔除,否则反之;S5:数据融合通过多站解算融合算法,对目标相对于各站点的距离信息进行加权融合,从而得出目标精确位置。
红外跟踪系统

第五章红外跟踪系统1.红外跟踪系统的基本原理:如图5-1所示,由无穷远目标辐射来的红外辐射能量透过整流罩照射到主反射镜上,经聚焦并反射到次反射镜子上,由次反射镜反射后,再经校正透镜进一步聚焦,最后成像于调制盘上,红外福射经调制盘调制后成为调制信号,目标像点在调制盘上所处的位置与目标在空间相对光轴的位置是一一对应的,因此,通过光学系统聚焦以及调制盘制后的信号,可以确定目标偏离光轴的大小和方位。
非制冷红外焦平面VO X(如VO2等)图5-1 光学系统结构示意图2.红外跟踪系统的组成如图5-1所示,红外跟踪系统由整流罩,主反射镜,次反射镜,校正透镜,调制盘,浸没透镜,光敏电阻和伞型光栏等元件组成,其各元件的主要功能如下:1)、整流罩:是一个半球形同心透镜,作为导弹头部的外壳。
它是一块负透镜,其作用为校正主反射镜的球差及作导引头的密封。
整流罩在导引头工件波段内有高的透过性能,亦即吸收、反射作用很小。
这种导弹的整流罩采用氟化镁多晶制成。
耐高温、机械强度高。
2)、主反射镜:起聚焦作用,它给整个光学系统带来正球差。
焦距f'=41.18mm,直径47.2mm,材料为K8玻璃,凹面上真空镀铝以减少入射辐射能损失。
3)次反射镜:用来折叠光路,同样为K8玻璃,表面镀铝。
4)校正透镜:用来把伞形光阑、平面反射镜等零件与镜筒连接在一起,起支撑作用。
另一方面因消除像差的需要而在次镜之后加入这样一个凸透镜,可以进一步消除剩余像差。
支撑透镜材料为氟化镁多晶。
5)伞形光阑:限制目标以外的杂散光线直射入系统光敏元件上的辅助光阑。
为了更有效地消除杂散光,伞形光阑上设有消光槽,各元件不通光部分都进行黑化处理。
6)场镜:可把通过调制盘的辐射能会聚到探测器光敏层上;另一方面,加入场镜后原来经物镜聚焦的照度不均匀的目标像斑,经焦面后发散的光线折向光轴,使光能均匀地分布在探测器的光敏层上。
场镜采用平凸透镜。
场镜材料为氟化镁单晶,在工作波段内有良好的透过率(一般紧贴调制盘后面)。
一种基于线阵扫描成像的红外搜索跟踪一体化系统设计

摘
要 : 析了红外 搜索跟踪系统的特点 ,比较了 目 分 前广泛采用 的几种 典型设计 方案。针对某地 基防空 警戒红外 系统
设计要求 ,提 出并实现 了一种新的基于线阵扫描成像 + 服周 扫的系统设计方案 ,重点介绍 了其 中关键部分实时信息处理 分 伺
I S t a p l d b o dy a r s n r o a e .F rte d ma d o e go n e il ee s n l r e sifa e y t m e i n R T ta p i r a l p e e t e c mp d o e n f h r u d a r f n ea d ae t s r r d s se d sg ,a h e t a r h t ad n n n w y t m e in me o a e n l e a ry s a ma i g a d s I o cr l g i rp s d e s se d sg t d b s d o i — ra —c n i gn n eT i i sp o o e .T e k y p r o e r aiai n o e r a- h n cn h e a t ft e z t ft e l h l o h t i a rc s u s s m se p an d i sg lp o e ss b y t i x l ie .T e c aa trsi o e n w d sg to s i a a i t t e ie b t e r h n n me n e h h rce it ft e e in meh d i t c p b l y o r a z oh s a c i g a d c h s i l t c i g i i ge s se w t w c s ,i c n r aie te fs 6 。w oe ar p c e rh n n a g ts r el n e n a s r - r k n n a s l y t m i l o t t a e z h t 0 a n ho l a 3 h l is a e s a c ig a d t re u v i a c ,a d C a op e l n l cs l r c ek y t g t n a u e i itn e, h n c me it en h h e — i n in l rc f h r e .T en w e in p o i y t k t e a e d me s r sdsa c t e o o b ig t et r e d me so a a k o e t g t h e d s r — e a h r a t n t t a g vd s te s s m i e g n i ef n t n o eo tee t n c rd r h u f l e t n h a u e aa v l ae t e d tc a a ie y t w t t e u n u ci ft p o lcr i a a .T e o t ed ts d t e me s rd d t ai t h ee t p ・ h e h h o h o i a d c bl y o e s se d sg . i t ft y t m e i i h n K y wo d I T;d m maltr e ;tr e ee t n;r a—i in r c s e r s: RS i s l ag t a g t tci d o e l me s a p o e s t gl
机载红外搜索与跟踪系统的现状与发展

第3 8卷 第 5期 20 0 8年 5月
激 光 与 红 外
L ER & I RARE AS NF D
V0. 8. o 5 13 N .
Ma 2 8 y,00
文章编号: 0 - 7 (08 0- 0- 1 1 08 20 )50 9 4 0 5 4 0
中图分 类号 :N 7 T 96 文献标 识 码 : A
S a RS S se s t t s a d De e o m n fAi b r e I T y t m
U u— o g F d n
( eiet e r et i fc f iF rei i hu J zo 20 0 C ia R s n pe n t eOf eo r oc J zo ,i hu1 10 , hn ) d R s av i A n n n
Ab t a t T e p o e so e eo me to e ar o e i f r d s a c n a k n y t m n al v rt ewo l n s sr c : h rc s fd v lp n f h ib r n r e e h a d t c i g s se i l o e r a d i t n a r r h d t mo i e o e d s rb d T e t c n q e p r r n e a d p o e t s o e e a ib r e i r e e r h a d ta k n d f  ̄in a e ci e . h e h i u ef ma c r p ri fs v r lar o n a d s a c n r c ig i r o n e n f r s se a e a a y e a d t e sau d d v l p n a y i ft e ar o e i r e e r h a d ta k n y t m e y tm n l z d; t t sa e eo me t l sso i r n a d s a c r n h n n a h bn fr n rc i g s se a r d s rb d e ci e .
一种自适应空间目标提取的红外跟踪系统设计

( hnh intueo T cncl hs sC i s cdm f cec ,hnhi 00 3 C ia Sag a Istt f eh i yi ,hn eA ae yo SineS aga 2 0 8 , h ) i aP c e n
Ab t a t A p c - a g t R T a k n y tm a e nd s n d T eh r wa ea d s f r tu t r r to u e . sr c : S a e T r e r c i gS se h sb e e i e . h a d r o wa esr cu ea e i r dg tI t a k ng s s e a e sg f a s a e t r e R r c i y t m b s d
o d p ie t r e ee to n a a tv g td t cin a
SHENG u y TANG n- i LIZhe g Ch n—u, Xi y , n
测跟 踪算 法上 , 针对 空 间 目标 红外 图像 特 性综 合 运 用 了 自适 应 背 景 去 除 、 态 阈 值 、 尔 曼 滤 波 等 动 卡
方法。
2 系统 概述
空 间 目标 地基红 外望 远镜 的红外 跟踪 系统 包 括
其 中的关键 , 需要 对 空间 目标实 现实 时探测 和跟 踪 , 要 求 有 极 高 的 跟 踪 精 度 、 探 测 概 率 , 踪 稳 高 跟 定 ¨-] 2。 近 年来 , 随着 红外 探测 器技术 的发 展 , 外 图像 红
空间 目标 实 时跟踪 要求 。 关键 词 : 外 目标跟 踪 ; 间 目标 ; 红 空 动态 阈值 ; D P—T 2 1 AS S 0 中 图分类 号 : N 1 T 29 文 献标识 码 : A D :0 3 6 /.sn 10 -0 8 2 1 .5 0 9 OI 1 . 9 9 ji .0 15 7 .0 2 0 .0 s
我国空军装备的红外搜索与跟踪系系统
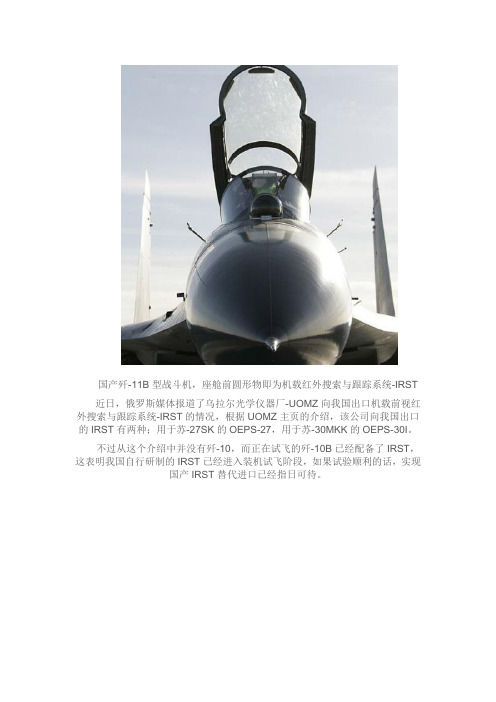
国产歼-11B型战斗机,座舱前圆形物即为机载红外搜索与跟踪系统-IRST近日,俄罗斯媒体报道了乌拉尔光学仪器厂-UOMZ向我国出口机载前视红外搜索与跟踪系统-IRST的情况,根据UOMZ主页的介绍,该公司向我国出口的IRST有两种;用于苏-27SK的OEPS-27,用于苏-30MKK的OEPS-30I。
不过从这个介绍中并没有歼-10,而正在试飞的歼-10B已经配备了IRST,这表明我国自行研制的IRST已经进入装机试飞阶段,如果试验顺利的话,实现国产IRST替代进口已经指日可待。
歼-10B已经配备国产IRST我们知道现代作战飞机的主要探测系统是机载火控雷达,现代机载火控雷达具备可以全天候工作、探测距离远、可以多目标跟踪与攻击等优点,但其缺点就是需要主动发射电波,在电子战日益激烈的现代空战中容易暴露自己,同时系统体积和重量都偏大,特别是隐身飞机的出现,也让雷达的实际探测效果大打折扣,因此作战飞机需要新的探测手段,以做为雷达的补充,所以IRST就出现了,从该系统的名称就可以看出其是采用红外探测原理,利用目标与背影的温差来探测目标,与机载雷达相比,机载IRST最大的优点就是不发射电波,隐蔽性强,抗电磁干扰能力好,特别是对抗隐身飞机时有巨大的优势,因为当隐身飞机飞行时其机身蒙皮会与空气磨擦生热,速成越快,温度越高,因此IRST的探测距离就越远,另外其工作波长短,系统功耗、体积和重量较小,可靠性较高,成本低,是各国重点发展的一项探测技术,机载红外探测系统除了IRST还有机载前视红外搜索系统(FLIR),两者的区别主要是IRST主要用于对空中目标的探测,其器件工作在中波,而FLIR主要用于对地面目标的探测,器件工作在长波,当然红外探测系统也不是完美无缺,其缺点就是探测距离较近,尤其是目标处于迎头探测时,目前性能较好的IRST的这个指标也不过在100公里左右,而普通机载雷达就超过了这个指标,另外就是其不能直接测量目标的距离,仍旧需要雷达或者激光测距仪来辅助,因此用于火控或者制导的时候仍旧会暴露平台的位置,另外就是受自然环境干扰较大,特别是太阳直视时、不良气候条件下的作用距离仍旧偏低。
红外搜索跟踪系统的关键技术和解决途径

红 外 搜 索跟 踪 系统 的关 键 技 术 和 解 决 途 径
翟 尚礼 白俊 奇
( 中 国电子科技 集 团公 司第二 十八研 究所 南京 2 1 0 0 0 7 )
摘 要 :首先 , 介 绍 了红 外搜 索跟踪 系统 的应 用特 点 , 论述 了 目前 国内红 外 系统 , 包括 光 学 系统 、 红 外传感 器和 图像 分析 处理 技 术 3方面制 约 因素 ; 然后 , 分析 了 目前红 外 系统存 在 的关键 性和瓶 颈 性 问题 ; 最后 , 给 出了解决上 述 问题 的 关键 技 术 , 提 出红 外 成像 系统新 体制 和 红 外 图像 处理 新技 术 是 提 高国 内红 外 目标探 测 能 力的有效 途径 。 关 键词 : 红 外搜 索跟踪 系统 ;红外 系统 ;双 波段 ;虚警 率 中图分 类号 : TP 3 0 2 . 1 ; TP 3 1 9 文献 标识 码 : A 文章 编号 : 1 6 7 4 — 9 o 9 X( 2 O 1 3 ) O 6 — 0 0 5 9 — 0 6
Ab s t r a c t :Ap p l i c a t i o n f e a t u r e s o f t h e i n f r a r e d s e a r c h a n d t r a c k i n g s y s t e m ( I RS T)a r e i n t r o d u c e d .
第4 卷 第6 期 2 0 1 3年 1 2月
・
指挥信息系统与技术
Co mma n d I n f o r ma t i o n S y s t e m a n d Te c h n o l o g y
V o1 .4 N o. 6