无线射频可视化遥控侦察车带PC操控平台
基于WIFI的视频监控智能小车机器人
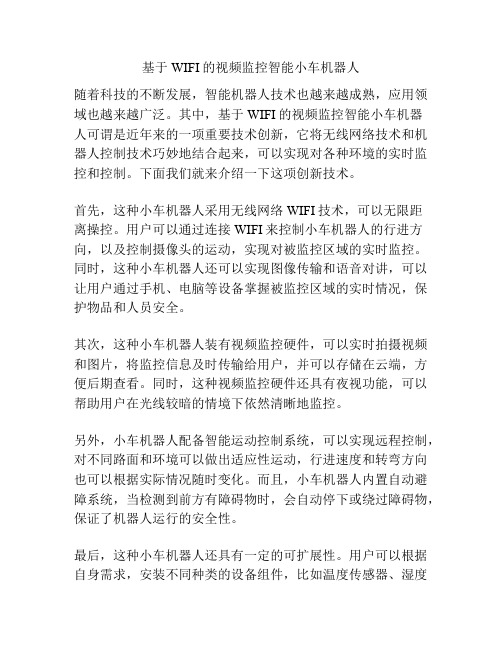
基于WIFI的视频监控智能小车机器人随着科技的不断发展,智能机器人技术也越来越成熟,应用领域也越来越广泛。
其中,基于WIFI的视频监控智能小车机器人可谓是近年来的一项重要技术创新,它将无线网络技术和机器人控制技术巧妙地结合起来,可以实现对各种环境的实时监控和控制。
下面我们就来介绍一下这项创新技术。
首先,这种小车机器人采用无线网络WIFI技术,可以无限距离操控。
用户可以通过连接WIFI来控制小车机器人的行进方向,以及控制摄像头的运动,实现对被监控区域的实时监控。
同时,这种小车机器人还可以实现图像传输和语音对讲,可以让用户通过手机、电脑等设备掌握被监控区域的实时情况,保护物品和人员安全。
其次,这种小车机器人装有视频监控硬件,可以实时拍摄视频和图片,将监控信息及时传输给用户,并可以存储在云端,方便后期查看。
同时,这种视频监控硬件还具有夜视功能,可以帮助用户在光线较暗的情境下依然清晰地监控。
另外,小车机器人配备智能运动控制系统,可以实现远程控制,对不同路面和环境可以做出适应性运动,行进速度和转弯方向也可以根据实际情况随时变化。
而且,小车机器人内置自动避障系统,当检测到前方有障碍物时,会自动停下或绕过障碍物,保证了机器人运行的安全性。
最后,这种小车机器人还具有一定的可扩展性。
用户可以根据自身需求,安装不同种类的设备组件,比如温度传感器、湿度传感器、声音传感器等,实现对不同数据的监控,并可以通过云端平台来处理数据,实现数据的查询和统计,方便用户进行管理和分析。
综上所述,基于WIFI的视频监控智能小车机器人是一种新兴的科技产品,它可以帮助用户实现对被监控区域的实时监控,实现了无限控制距离和自动避障等功能,同时具有可扩展性。
因此,在安防、环保、园林等领域具有广泛的应用前景,也为未来的机器人发展指明了一条新的路线。
射频遥控器操作方法
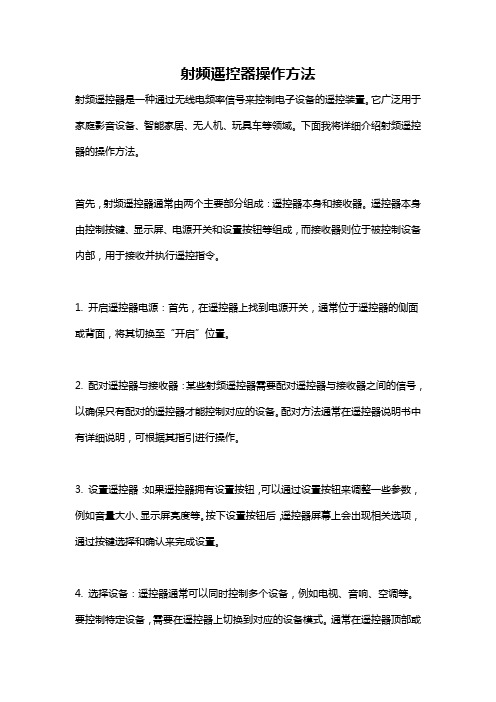
射频遥控器操作方法射频遥控器是一种通过无线电频率信号来控制电子设备的遥控装置。
它广泛用于家庭影音设备、智能家居、无人机、玩具车等领域。
下面我将详细介绍射频遥控器的操作方法。
首先,射频遥控器通常由两个主要部分组成:遥控器本身和接收器。
遥控器本身由控制按键、显示屏、电源开关和设置按钮等组成,而接收器则位于被控制设备内部,用于接收并执行遥控指令。
1. 开启遥控器电源:首先,在遥控器上找到电源开关,通常位于遥控器的侧面或背面,将其切换至“开启”位置。
2. 配对遥控器与接收器:某些射频遥控器需要配对遥控器与接收器之间的信号,以确保只有配对的遥控器才能控制对应的设备。
配对方法通常在遥控器说明书中有详细说明,可根据其指引进行操作。
3. 设置遥控器:如果遥控器拥有设置按钮,可以通过设置按钮来调整一些参数,例如音量大小、显示屏亮度等。
按下设置按钮后,遥控器屏幕上会出现相关选项,通过按键选择和确认来完成设置。
4. 选择设备:遥控器通常可以同时控制多个设备,例如电视、音响、空调等。
要控制特定设备,需要在遥控器上切换到对应的设备模式。
通常在遥控器顶部或侧面有个模式选择按钮或滑块,通过切换模式来选择需要控制的设备。
5. 发送指令:射频遥控器的主要功能是发送指令给接收器,从而控制设备的操作。
根据要控制的设备不同,遥控器上的按键功能也会有所差异。
通常有些常见的按键功能包括:电源开关、频道切换、音量调节、菜单控制等。
通过按下对应的按键,遥控器会发送对应的信号给接收器,从而执行相应的操作。
6. 遥控距离:射频遥控器的操作要求在一定的距离范围内进行。
一般情况下,操作距离为10米左右,但实际距离可能会受到环境干扰、遥控器电池电量等因素的影响。
在操作时要注意保持一定的距离,确保信号的稳定传输。
7. 遥控器电池更换:随着使用时间的增长,遥控器电池可能会耗尽,这时需要更换电池。
通常,遥控器背面会有一个电池仓,拧下电池仓盖,将电池按照正确的极性放入即可。
Doublecom无线监控行业应用手册

如需详细产品资料或解决方案,请与我们联系,我们将为您提供最优质的服务。
免费服务热线
4006 866 288
大型企业内部定点监控、移动监控,无线上网、无线 VOIP 通话, ,工业PLC 无线控制。 还可以应用于学校、小区、医院、景区、园林、酒店、国家重点保护单位的无线监控、无线上网。
5、油田、天然气、水库、森林防火、水利的监控遥测
油田/天然气田大多位于沼泽、沙漠和盆地、浅海等区域,因远离城市地广人稀,交通通信等设施 较为落后。建立基于 WLAN 技术建立无线局域网络,实现远距离钻井平台联网,油井无线监控。 全面实施水利系统远程视频实时监控系统,对可能或正在发生的汛情、险情、灾情进行实时动态监控, 实现水电站建设中的施工现场无线远距离监控和灌区的无线远距离联网,实现灌区自动化调度管理,水 文地质检测站远程联网。
10.超强抗干扰能力
四、Doubelcom( 多倍通)成功案例参考
1 济南泉城路派出所车载移动无线监控系统 2 泰安肥城特钢厂无线联网系统 3 淄博宝运化工厂无线监控系统 4 甘肃庆城电力局各变电站无线联网系统 5 淄博傅山集团无线监控系统 6 济宁汶上建筑工地无线监控系统 7 东营广饶油田无线监控系统 8 济南某派出所治安管理无线监控 9 潍坊某市公安局车载移动监控 10 临沂市物流园无线监控 11 济南某棉纺企业无线监控 12 山东青岛某海上无线监控项目 13 山东东营某海岛无线监控项目 14 山东烟台某养殖厂无线监控项目 15 山东烟台海上施工无线监控项目 16 山东东营某社区无线监控项目 17 山东电力550KV 闻韶站无线监控无线覆盖项目 18 山东电力350KV 油城站无线监控无线覆盖项目 19 山东临沂大学城变电站无线网络传输及无线监控传输 20 山东聊城水利局无线网络传输 21 山东滨州移动营业厅 WLAN 无线桥接项目 22 山东移动邹平营业厅无线网络传输 23 山东移动沾化营业厅无线网络传输 24 山东海阳核电站核岛区无线监控项目 25 山西柳林道路电子警察无线监控 26 青岛某服装公司局域网桥接 27 上海徐行政府流动人口无线监控 28 上海某度假村无线宽带上网 29 上海某长途车站车载无线覆盖 30 31 32 33 34 35 36 37 38 39 40 41 42 输 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 上海惠氏奶粉总部分部无线桥接 上海世博会重点路口无线监控 浙江富阳森林防火无线监控 上海某中学无线覆盖 上海某高档写字楼无线桥接上网 烟台某医院无线桥接 烟台龙口政府无线监控 东营利津油田区油井无线监控 东营渤海海上钻井平台无线监控 东营二矿油井无线监控 东营河口林业局森林防火无线监控 东营河口油区办无线监控 甘肃某驾校电子考场无线监控及数据传 武汉某学校无线桥接和无线覆盖 山西 13 个火车站无线监控 山西某煤矿无线桥接 黄河水位无线监控 浙江丽水森林防火无线监控 上海某郊区农村道路无线监控 合肥逍遥津公园无线监控系统 浙江舟山 LED 无线总控系统 连云港森林防火无线监控系统 上海某公园无线监控系统 内蒙古赤峰市数字城管无线监控系统 安徽繁昌一中无线校园网 安徽太和自来水厂无线监控系统 南通通州人民医院无线覆盖系统 江苏淮安数字城管无线监控系统
巡检机器人 维护使用手册说明书

巡检机器人维护使用手册版本:2.0北京眸视科技有限公司目录1.产品概述 (4)1.1.产品概述 (4)1.2.履带式机器人 (5)1.3.轮式机器人 (5)2.机器人开机 (6)2.1.机器人开机 (6)2.2.遥控器使用 (6)2.3.遥控器高级使用 (7)2.4.注意事项 (9)3.平板控制 (10)3.1.Wifi连接 (10)3.2.运行APP (10)3.3.自启动功能 (10)3.4.License更新功能 (11)3.5.参数配置 (14)3.6.状态检查 (15)3.7.开启巡检 (16)4.制图 (17)4.1.制图 (17)4.2.地图编辑 (20)4.3.地图备份与切换 (25)4.4.注意事项 (27)4.4.1.制图之前的准备 (28)4.4.2.建图操作原则 (28)4.4.3.建图结果检查 (30)5.导航 (31)5.1.导航到指定点 (31)5.2.导航到指定坐标 (32)5.3.取消导航 (32)6.1.准备工作 (34)6.2.工具安装 (34)6.2.1.开启root ssh权限 (34)6.2.2.JDK的安装 (35)6.2.3.TOMCAT安装 (35)6.2.4.MySQL数据库在线安装 (36)6.2.5.Redis安装 (37)6.2.6.Nginx安装 (37)6.3.程序部署 (38)6.3.1.前端web程序部署 (38)6.3.2.后端jar包部署 (39)6.4.系统参数配置 (41)6.4.1.域名地址映射 (41)6.4.2./etc/profile确认 (41)6.5.启动管理云平台系统程序 (41)6.5.1.后台java程序启动 (42)6.5.2.前台tomcat启动 (42)6.5.3.确认后台程序是否启动成功 (42)6.5.4.访问系统url (42)7.云平台使用 (43)7.1.系统登录 (43)7.1.1.系统首页 (44)7.1.2.个人中心 (45)7.2.实时监控 (45)7.3.数据查询 (47)7.3.1.巡检报表 (47)7.3.2.巡检点 (48)7.3.3.环境数据 (48)7.4.巡检任务 (49)7.4.1.任务管理 (49)7.4.2.任务日历 (51)7.5.1.巡检点管理 (52)7.5.2.地图管理 (53)7.5.3.机器人管理 (54)7.5.4.告警设置 (55)7.6.系统管理 (56)7.6.1.用户管理 (56)7.6.2.角色管理 (57)7.6.3.菜单管理 (59)7.6.4.场站管理 (59)7.6.5.字典管理 (60)7.6.6.车体状态 (61)7.6.7.版本信息 (62)8.巡检 (63)8.1.启动检查 (63)8.2.云平台操作 (64)9.注意事项 (66)9.1.常规检查 (66)9.2.维护保养 (66)9.3.长期储存 (67)10.快速故障排除 (69)10.1.机器人故障排查 (69)10.2.云端服务故障排查 (71)10.3.遥控器故障排查 (72)附录1:充电桩安装说明 (75)附录2、传感器清洁 (76)附录3、产品参数 (77)1.产品概述1.1.产品概述眸视机器人定位和导航系统,是一个集激光雷达、视觉(双目相机、深度相机)、超声波、惯性测量单元(IMU)等多种传感器于一体的定位和导航系统。
应急通信指挥车方案讲解

应急通信指挥车技术方案目录第一章综述................................................................................................................................ - 1 -1.1 设计思想....................................................................................................................... - 1 -1.2 设计原则....................................................................................................................... - 3 -1.3 建设目标....................................................................................................................... - 3 -1.4 主要功能....................................................................................................................... - 4 -1、通信功能................................................................................................................ - 4 -2、图像采集、处理和传输功能................................................................................ - 4 -3、广播功能................................................................................................................ - 4 -4、照明功能................................................................................................................ - 4 -5、会议功能................................................................................................................ - 4 -6、供配电功能............................................................................................................ - 4 -第二章总体设计........................................................................................................................ - 6 -总体框架和总体拓扑示意图.............................................................................................. - 6 -2.1 无线图像传输系统....................................................................................................... - 7 -2.1.1 TFDM单兵式/密拍式无线图像传输设备传输流程........................................ - 7 -2.1.2 TFDM车载式无线图像传输设备传输流程................................................... - 10 -2.1.3 便携式3G公网无线图像传输设备传输流程 ............................................... - 12 -2.1.3 车载式3G公网无线图像传输设备传输流程 ............................................... - 15 -2.2 照明系统..................................................................................................................... - 18 -2.4 供配电系统................................................................................................................. - 20 -2.4.1 发电机.............................................................................................................. - 21 -2.4.2 APC不间断电源在线式5KV(C3KS)........................................................ - 22 -2.4.3 配电系统设计.................................................................................................. - 23 -2.5 安全警示系统........................................................................................................... - 23 -2.6 其他及辅助系统......................................................................................................... - 23 -2.6.1 广播系统.......................................................................................................... - 23 -第三章车辆改制...................................................................................................................... - 26 -3.1 原车外观与参数......................................................................................................... - 26 -3.2 外观效果图................................................................................................................. - 26 -3.3 总体布局图................................................................................................................. - 27 -3.4 整车配重..................................................................................................................... - 28 -3.5 设备减振..................................................................................................................... - 28 -3.6 系统的可维修性......................................................................................................... - 28 -3.7 设备及人员安全......................................................................................................... - 28 -3.8 电磁干扰(EMC)的解决 ........................................................................................ - 29 -3.9 车内装饰..................................................................................................................... - 29 -3.10 表面处理................................................................................................................... - 30 -3.11 车辆密封................................................................................................................... - 30 -3.12 隔音隔热................................................................................................................... - 30 -第四章设备配置列表......................................................................................错误!未定义书签。
th-x智能小车遥控器说明

th-x智能小车遥控器说明一、简介th-x智能小车遥控器是一款先进的遥控设备,专为控制th-x智能小车而设计。
它采用先进的无线通信技术,能够实现精确的远程控制,为用户提供更便捷、灵活的操控体验。
二、功能特点1. 高精度控制:th-x智能小车遥控器具备高精度的控制能力,可以实时响应用户的指令,并精确控制小车的运动。
无论是前进、后退、转向还是停止,都可以通过遥控器轻松完成。
2. 多种操作模式:遥控器支持多种操作模式,包括手动模式、自动巡航模式和编程模式。
手动模式可让用户自由控制小车的运动;自动巡航模式可使小车按照预设轨迹行驶;编程模式则允许用户自定义指令,实现更复杂的控制逻辑。
3. 可编程性:遥控器内置编程功能,用户可以通过简单的操作,将自己的创意想法转化为实际的行动。
通过编写代码,用户可以实现小车的各种特定功能,如避障、跟随等,从而满足不同场景下的需求。
4. 强大的信号传输能力:th-x智能小车遥控器采用先进的无线通信技术,信号传输稳定可靠。
即使在复杂的环境中,也能保持良好的信号连接,确保用户能够始终掌控小车的运动。
5. 人性化设计:遥控器采用人性化设计,外观简洁大方,握持舒适。
按钮布局合理,使用方便,用户可以轻松上手,快速掌握使用方法。
三、操作说明1. 开机与连接:按下遥控器上的电源按钮,遥控器将会开机并自动连接th-x智能小车。
连接成功后,遥控器上的指示灯将会亮起。
2. 手动模式操作:a. 前进:按下遥控器上的“前进”按钮,小车将会前进。
b. 后退:按下遥控器上的“后退”按钮,小车将会后退。
c. 左转:按下遥控器上的“左转”按钮,小车将会向左转向。
d. 右转:按下遥控器上的“右转”按钮,小车将会向右转向。
e. 停止:按下遥控器上的“停止”按钮,小车将会停止当前的运动。
3. 自动巡航模式操作:a. 设置路径:按下遥控器上的“路径设置”按钮,遥控器将进入路径设置模式。
通过遥控器上的摇杆或方向键,设置小车需要行驶的路径。
基于LabVIEW的无线遥控汽车检测台设计

基于LabVIEW的无线遥控汽车检测台设计杨进成;夏春蕾;戴曙光【摘要】针对传统汽车检测耗时长、统计复杂等问题,在LabVIEW软件基础上,通过CAN通信协议等,提出了汽车遥控数据检测系统设计的方法.采用CAN通讯协议、无线遥控、USB驱动、打印机设计等,可快速完成向工控机发送控制命令,实现汽车功能的检测,并以Excel格式记忆所有的检测结果,其具有快速、稳定、实时记录与打印的性能.实际结果表明,该系统在检测行业、尤其汽车检测方面具有广泛的使用价值.【期刊名称】《电子科技》【年(卷),期】2016(029)010【总页数】4页(P129-132)【关键词】无线自动化测试;CAN总线;LabVIEW;动态调用链接库【作者】杨进成;夏春蕾;戴曙光【作者单位】上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093【正文语种】中文【中图分类】TP368.1控制器局部网(CAN总线),解决了汽车电子设备之间的通信问题,减少电子设备之间繁多的信号线[1]。
作为当前流行的网络通信控制方式,其性能远高于传统的控制方式。
CAN总线系统数据稳定可靠,具有线间干扰小、抗干扰能力强的特点[2]。
汽车的集成化模块及功能日益丰富,使用传统的汽车检测方法,会造成人力、物力的大量投入。
因此,CAN通信在汽车上的应用,使大量的检测得到简化。
此设计是基于LabVIEW软件平台上的,利用CAN通讯协议,完成汽车与工控机的信息传输。
再结合无线遥控功能,搭建无线控制汽车检测系统。
主要运用到汽车生产检测,有效、快速帮助使用者遥控完成生产测试。
在生产方面,主要通过CAN通信点亮汽车仪表盘功能以及车用DVD部分,通过控制高低电平、PWM信号等完成检测。
用户通过无线工业遥控器进行遥控操作,同时打印不符合要求的仪器。
所有的操作数据会以Excel格式记录。
无线遥控技术及其在起重机上的应用

起重机无线遥控系统的功能
控制起重机的基本动作: 如升降、伸缩、旋转等。
安全保护功能:如超载保 护、幅度限制、角度限制 等。
ABCD
显示起重机的状态信息: 如负载重量、工作幅度、并提示故障信息, 方便维修人员快速定位和 解决问题。
03
无线遥控技术在起重机 应用中的挑战与解决方 案
随着物联网技术的发展,无线数传模块在工业自动化领域得到广泛 应用,可以实现远程数据采集和控制。
无线遥控技术的应用领域
工业自动化
无线遥控技术可以实现设备的远程控制和监测, 提高生产效率和安全性。
无人机
无线遥控技术是无人机的核心技术之一,可以实 现无人机的远程控制和自主飞行。
ABCD
智能家居
通过无线遥控技术,可以实现家庭设备的远程控 制和智能化管理,提高生活便利性。
特点
无线遥控技术具有远程控制、实时监 测、灵活性强、安全性高等优点,广 泛应用于工业自动化、智能家居、无 人机等领域。
无线遥控技术的发展历程
早期无线电遥控
20世纪初,无线电遥控技术开始出现,主要用于航模和军事领域。
红外线遥控
20世纪70年代,红外线遥控技术开始普及,广泛应用于家电、玩 具等领域。
无线数传模块
优化操作、提升作业能力
详细描述
某大型物流公司起重机的无线遥控系统升级后,优化了操作流程,提升了作业能力,满足了快速装卸货物的需求。
THANKS FOR WATCHING
感谢您的观看
04
无线遥控技术在起重机 应用的发展趋势
无线遥控技术的未来发展方向
技术创新
无线遥控技术将继续在信号传 输、稳定性、安全性等方面进 行技术创新,提高遥控操作的
准确性和可靠性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
西安电子科技大学
届“星火杯”大学生课外学术科技作品竞赛
科技发明制作类说明
作品名称:
基于无线射频通信技术的可视化遥控侦察车
作品类别:
科技发明制作类
作品编号:
作品功能简介及使用说明书
基于无线射频通信技术的可视化遥控侦察车作品简介:
硬件部分
安装无线摄像头,实现可视化遥控,户外传输距离理论值可达到100 米。
使用电脑进行可视化遥控,探测车可脱离人的视野执行侦察任务。
配有红外传感器,探测车可实现自动避障,循迹。
可遥控打开探照灯,进行黑暗条件下工作。
采用履带式底盘,双直流电机,具有一定的越野能力。
系统可扩展,增加传感器后可实现多种信号的采集回传。
软件部分 自主开发的操控软件(软件用 C#语言编写)
界面上显示小车回传图像,并有各种功能按钮。
在此软件中可用电脑键盘控制小车的行走并完成相应动作, 可根据传回的音频,视
频信号,实现窃听,拍照,录制。
操作说明:
在电脑上打开软件平台,打开串口,实现电脑与收发器间的通信。
打开小车开关,实现收发器与小车通信.
在软件平台上,使用键盘的 W A S D 键控制行进的方向,
1
口 号
按p 键可打开探照灯。
按照软件界面上的提示可拍照,或录制声音,录制图像。
也可以用手持遥控器进行遥控。
遥控器配有大功率发射模块。
系统简介:
PC—串口)收发器—《—(射频模块)—小车控制系统PC :与收发器进行串口通信。
通过操控软件发送指令,并显示小车回传的数据。
收发器:以STC 单片机为核心,配有24l01 无线数传模块。
收发器与电脑进行串口通信,接收电脑的指令代码,然后将指令代码通过数传模块传递给小车。
同时收发器能接收小车回传的信号,将小车的状态传递给电脑。
小车控制系统 :控制系统以STC 单片机为核心,通过数传模块与收发器进行双向通信,接收并执行指令,同时向收发器回传数据。
控制系统组件:
STC 单片机最小系统板
LCD 液晶屏幕无线模块插接板继电器板直流电机驱动板红外传感器
动力部分: 两个直流电机齿轮组履带
电源部分 :
4.8V 充电电池包 为电机供电 ,为探照灯供电 9V 电池 经稳压后为单片机系统供电
9V 电池 为继电器供电,为摄像头供电 无线模块,传感器,液晶屏幕等从单片机系统取电
无线模块特性简介 :
(1) 2.4Ghz 全球开放 ISM 频段免许可证使用
(2) 最高工作速率 2Mbps ,高效 GFSK 调制, 适合工业控制场合
(3) 126 频道,满足多点通信和跳频通信需要
(4) 内置硬件 CRC 检错和点对多点通信地址控制
(5) 低功耗 1.9 - 3.6V 工作,待机模式下状态为 式下
为 900nA (6) 内置 2.4Ghz 天线,体积小巧 15 mm X 22 mm (7) 模块可软件设地址,只有收到本机地址时才会输出数据(提 供中断指示 ) ,可直接接各种单片机使用,软件编程非常方便
无线摄像头参数 :
图像感应 (Imaging Sensor) 1/3 寸彩色 CMOS
总像数 (Total Pixels) 628 x 582 (PAL)/510 x 492 (NTSC)
调制类型 (Modulation Type) FM
带宽 (Bandwidth) 18MHz
抗干扰能力强,特别
22uA ;掉电模
}
无障碍距离 (Unobstructed Effective Range(Min.)) 100
小车控制系统单片机部分代码: 上位机:
main()
uchar temp_serial[7]={'*','0','0','0','0','0','#'}; uchar CommendFromSerial;
InitSerial();
SetP0down();
T0_valueSet();
//主循环
while(1){
//检测执行按键
if(P33==0) // 电平升
if(X<99) X++;
if(P34==0) // 电平降
if(X>1) X--;
供电电源 (Power
Supply)
+8V DC
米(M )
如有你有帮助,请购买下载,谢谢!//检测执行串口命令if(RI==1){
RI=0;
CommendFromSerial=SBUF;
if(CommendFromSerial=='+'){
if(X<10)X=X+1;
if(CommendFromSerial=='-'){
if(X>1)X=X-1;
if(CommendFromSerial=='w'){
SetP0down();
P00=1;
if(CommendFromSerial=='a'){
SetP0down();
P01=1;
if(CommendFromSerial=='d'){
SetP0down();
P02=1;
}
如有你有帮助,请购买下载,谢谢!
if(CommendFromSerial=='s'){
SetP0down();
P03=1;
if(CommendFromSerial=='p'){
SetP0down();
P01=1;
P02=1;
//刷新状态字符串
temp_serial[1]=mun_char_table[X/10];
temp_serial[2]=mun_char_table[X%10];
temp_serial[3]=mun_char_table[P37==0];
temp_serial[4]=mun_char_table[P10==0];
temp_serial[5]=mun_char_table[P11==0];
//发送状态字符串for(i=0;i<7;i++){
SBUF=temp_serial[i];
while(TI==0);
delay(200);
SetP0down();
TI=0;
}
如有你有帮助,请购买下载,谢谢!下位机:
void main()
lcd_system_reset(); /*LCD1602 初始化*/
for(i=0;i<16;i++) lcd_char_write(i,0,line[i]);
for(i=0;i<16;i++) lcd_char_write(i,1,line2[i]);
Stop();
while(1){
lcd_char_write(1,1,mun_to_char[P30]);
lcd_char_write(2,1,mun_to_char[P31]);
lcd_char_write(3,1,mun_to_char[P32]);
lcd_char_write(4,1,mun_to_char[P33]);
lcd_char_write(7,1,mun_to_char[P10]);
lcd_char_write(8,1,mun_to_char[P13]);
Control();
Evade();
delay(4);
}
如有你有帮助,请购买下载,谢谢!
由于时间关系,部分功能还不够完善,正在不断改进之中
2009 年11 月。