基于as矢量控制的PWM整流器SIMULINK建模与仿真
基于Matlab_Simulink的三相桥式全控整流电路的建模与仿真
基于Matlab/Simulink的三相桥式全控整流电路的建模与仿真摘要本文在对三相桥式全控整流电路理论分析的基础上,建立了基于Simulink的三相桥式全控整流电路的仿真模型,并对其带电阻负载时的工作情况进行了仿真分析与研究。
通过仿真分析也验证了本文所建模型的正确性。
关键词Simulink建模仿真三相桥式全控整流对于三相对称电源系统而言,单相可控整流电路为不对称负载,可影响电源三相负载的平衡性和系统的对称性。
故在负载容量较大的场合,通常采用三相或多相整流电路。
三相或多相电源可控整流电路是三相电源系统的对称负载,输出整流电压的脉动小、控制响应快,因此被广泛应用于众多工业场合。
本文在Simulink仿真环境下,运用PowerSystemBlockset的各种元件模型建立三相桥式全控整流电路的仿真模型,并对其进行仿真研究。
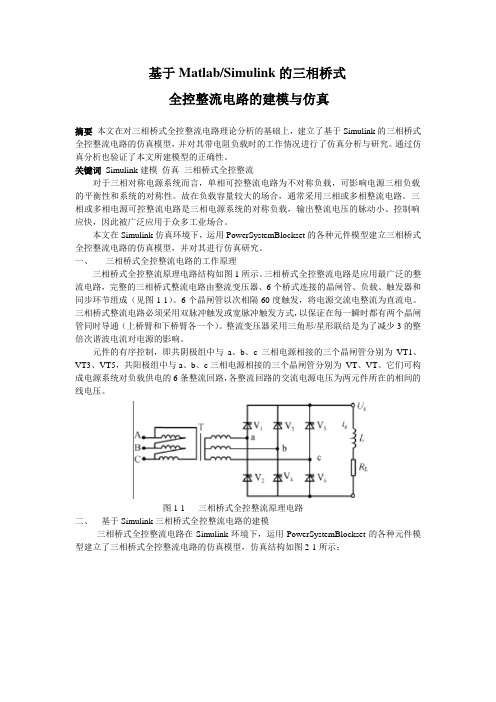
一、三相桥式全控整流电路的工作原理三相桥式全控整流原理电路结构如图1所示。
三相桥式全控整流电路是应用最广泛的整流电路,完整的三相桥式整流电路由整流变压器、6个桥式连接的晶闸管、负载、触发器和同步环节组成(见图1-1)。
6个晶闸管以次相隔60度触发,将电源交流电整流为直流电。
三相桥式整流电路必须采用双脉冲触发或宽脉冲触发方式,以保证在每一瞬时都有两个晶闸管同时导通(上桥臂和下桥臂各一个)。
整流变压器采用三角形/星形联结是为了减少3的整倍次谐波电流对电源的影响。
元件的有序控制,即共阴极组中与a、b、c三相电源相接的三个晶闸管分别为VT1、VT3、VT5,共阳极组中与a、b、c三相电源相接的三个晶闸管分别为VT、VT。
它们可构成电源系统对负载供电的6条整流回路,各整流回路的交流电源电压为两元件所在的相间的线电压。
图1-1 三相桥式全控整流原理电路二、基于Simulink三相桥式全控整流电路的建模三相桥式全控整流电路在Simulink环境下,运用PowerSystemBlockset的各种元件模型建立了三相桥式全控整流电路的仿真模型,仿真结构如图2-1所示:图2-1 三相桥式全控整流电路的仿真模型在模型的整流变压器和整流桥之间接入一个三相电压-电流测量单元V-I是为了观测方便。
基于空间矢量控制的PWM整流器建模与仿真

Vβ 为 V* 在 а 、 β 轴上的坐标值,定义以下变 设Vα、 A=Vα
%
B= 姨 3 Vα-Vβ
%
C=- 姨 3 Vα-Vβ
令H=sgn(A)+2sgn(B)+4sgn(C), 可以得出H与各扇区的 表1 H与扇区号对应关系 Tab.1 H and sector number corresponding relationship
同步旋转坐标系中电流调节器输出的任意一个 空间电压矢量指令V*, 均可由8条空间电压矢量合成。 * 稳态时, V 在复平面上以某一步进速度旋转,其端点 运动轨迹为一多边形准圆形轨迹, PWM 开关频率越 高, 多边形准圆轨迹就越接近圆, 由于空间电压矢量 不断跟踪V*, 从而使三相桥的输入为等效正弦波, 实 现了电流控制的目的。 2.1 扇区的确定 量:
给控制器设计造成了一定困难。为了实现d、 q轴的独 立控制, 采用前馈解耦控制策略 。 当电流调节器采用 PI调节器时, vd、 vq的控制方程如下: KiI * vd=(Kip+ ) (id-id ) +ωLiq+ed s (3 ) KiI * vq=(Kip+ ) (iq-iq ) -ωLid+eq s
! # # # # # # " # # # # # # $
图4
电压外环控制结构
KiI 为电流内环比例调节增益和积分调节增 式中 Kip、 * * 益; i d、 i q为id、 iq电流指令值。 由于电网电动势矢量定向在 d 轴上, 故 (3 ) 式中 eq=0。电流内环的解耦控制再加上外环的电压控制, 就构成了PWM整流器的双闭环控制系统, 如图2。
基于PWM逆变器的Simulink仿真
基于 PWM逆变器的 Simulink仿真摘要:在本次设计中,用到MATLAB中的Simulink中的Sim Power Systems工具箱中的电力电子器件进行的仿真,然后通过斩波电路将波形进行优化,即将其幅值增高然后通过逆变将其转换为50赫兹的交流电,在各方面再详细的分析和设计,并且考虑到会出现直流不平衡等方面,通过理论查找以及MATLAB的仿真实验来说明这个方法可以更优方式将输入110V直流转换成220V、50赫兹的单相交流电。
关键词:逆变;MATLAB仿真;PWM控制0 引言晶闸管相控整流电路的I滞后U,而且他的功率角随着触发脉冲的触发时间即触发角的变大而变大,功率因数变低,对电网的运行造成影响。
而利用SPWM正弦脉宽调制技术,可以很好减小对电网的影响,因此研究SPWM正弦脉宽调制意义重大。
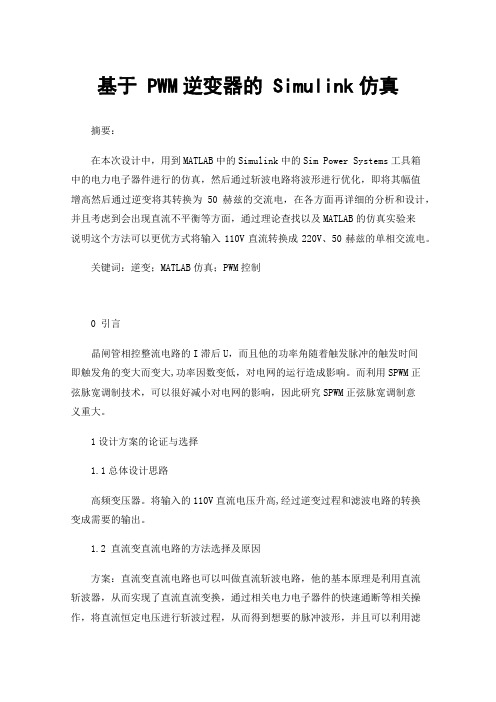
1设计方案的论证与选择1.1总体设计思路高频变压器。
将输入的110V直流电压升高,经过逆变过程和滤波电路的转换变成需要的输出。
1.2 直流变直流电路的方法选择及原因方案:直流变直流电路也可以叫做直流斩波电路,他的基本原理是利用直流斩波器,从而实现了直流直流变换,通过相关电力电子器件的快速通断等相关操作,将直流恒定电压进行斩波过程,从而得到想要的脉冲波形,并且可以利用滤波来进一步优化波形,而直流波形的脉冲宽度是可以通过改变电力电子元件的开通与关断的动作频率来调整,从而使得电压以及电流的平均值得到想要的变化,总的来说,直流变直流是将直流电改成另一种可以调整电压与电流均值的直流电。
原因:利用升压斩波电路优点是该电路结构不复杂,而且其相对损失少,并且效率还比较高,并且滤波后还能有效减少了谐波的电流噪声的工作。
1.3逆变电路的方法选择以及原因方法:全桥逆变电路如图所示,这个逆变电路有T1,T2,T3,T4四个开关元件,另T1,T4一起导通,T2,T3一起导通,而且他们一起交替导通,然后将直流的电压改变为峰值为Uin的交流电压,然后进行输入,通过改变占空比,相当于调整了输出电压Uout。
基于矢量控制技术的PWM整流器理论与仿真
。
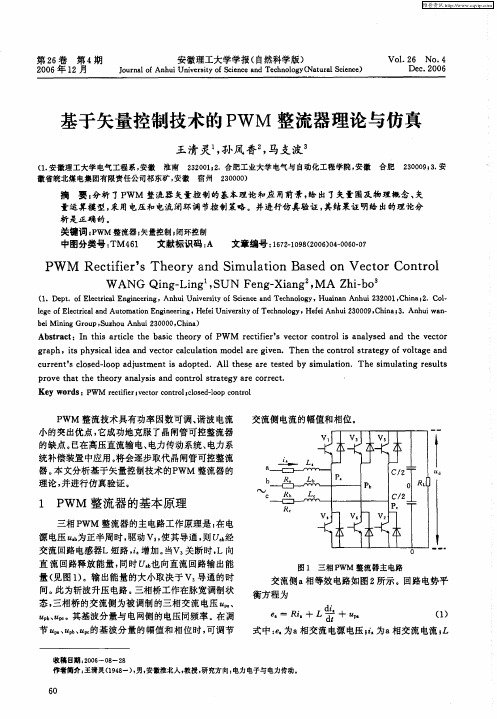
P WM 整流技术具有功率因数可调、 谐波电流 小的突出优点 , 它成功地克服了晶闸管可控整流器 的缺点。 已在高压直流输 电、 电力传动系统、 电力系 统补偿装置中应用 。 将会逐步取代 晶闸管可控整流 器 。 文分析基 于 矢量控 制技术 的P 本 WM 整 流器 的 理论, 并进行仿真验证。
维普资讯
第2 卷 第4 6 期 安徽理工大学学报( 自然科学版) 20 年 1 月 06 2 J r lf nuU i rtoSi c a e nl yN t aSic) o n hi n e i e e n Tc o g(a r e e u aoA v sy f cn d h o u lcn
W ANG Qig L n S n — ig , UN F n — a g , A h— o e g Xin 。M Z ib 。
( .De t f e tia gn eig,An u ie s y o ce c n c n lg Hu ia h i2 2 0 Ch n .Co— 1 p .o crclEn ie rn El h i Unv ri fS in ea dTeh oo y, an n An u 3 0 1, i a t j 2 l lg f etia n tma inEn ie rn Hde nv riyo c n lg Hee h i 3 0 9, i a 3 e eo crc l dAu o t gn e ig, El a o i ie st fTe h oo y, fi U An u 0 0 Chn , .An u n 2 h i wa —
矢量控制PWM整流器的建模与仿真
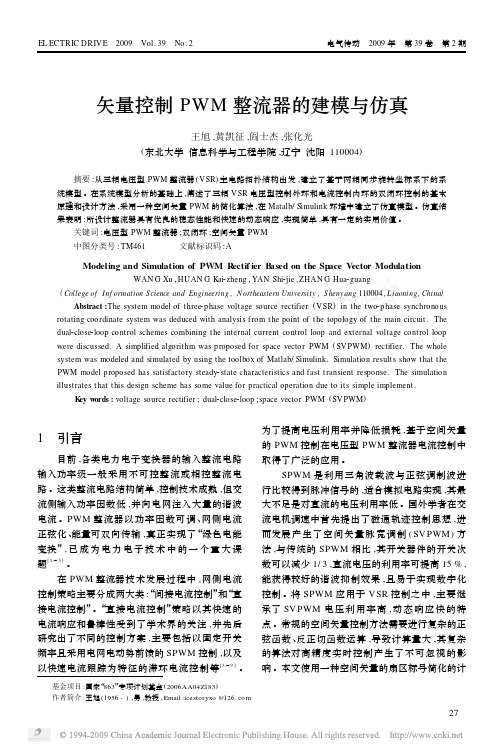
矢量控制PWM 整流器的建模与仿真王旭,黄凯征,阎士杰,张化光(东北大学信息科学与工程学院,辽宁沈阳110004) 摘要:从三相电压型PWM 整流器(VSR )主电路拓扑结构出发,建立了基于两相同步旋转坐标系下的系统模型。
在系统模型分析的基础上,阐述了三相VSR 电压型控制外环和电流控制内环的双闭环控制的基本原理和设计方法,采用一种空间矢量PWM 的简化算法,在Matalb/Simulink 环境中建立了仿真模型。
仿真结果表明:所设计整流器具有优良的稳态性能和快速的动态响应,实现简单,具有一定的实用价值。
关键词:电压型PWM 整流器;双闭环;空间矢量PWM 中图分类号:TM461 文献标识码:AModeling and Simulation of PWM R ectif ier B ased on the Space V ector ModulationWAN G Xu ,HUAN G Kai 2zheng ,YAN Shi 2jie ,ZHAN G Hua 2guang(College of Inf ormation Science and Engineering ,N ortheastern University ,S henyang 110004,L iaoning ,China )Abstract :The system model of three 2phase voltage source rectifier (VSR )in the two 2phase synchronous rotating coordinate system was deduced with analysis from the point of the topology of the main circuit.The dual 2close 2loop control schemes combining the internal current control loop and external voltage control loop were discussed.A simplified algorithm was proposed for space vector PWM (SV PWM )rectifier.The whole system was modeled and simulated by using the toolbox of Matlab/Simulink.Simulation results show that the PWM model proposed has satisfactory steady 2state characteristics and fast transient response.The simulation illustrates that this design scheme has some value for practical operation due to its simple implement.K ey w ords :voltage source rectifier ;dual 2close 2loop ;space vector PWM (SVPWM ) 基金项目:国家“863”专项计划基金(2006AA04Z183) 作者简介:王旭(1956-),男,教授,Email :icestoryxo @1 引言目前,各类电力电子变换器的输入整流电路输入功率级一般采用不可控整流或相控整流电路。
基于Matlab/SIMULINK的桥式直流PWM变换电路实验仿真分析
基于Matlab/SIMULINK的桥式直流PWM变换电路实验仿真分析本文以MATLAB软件的SIMULINK仿真软件包为平台,对桥式直流PWM 变换电路进行仿真分析文章对每个电路首先进行原理分析,进而建立相应的仿真模型,经过详细计算确定并设置仿真参数进行仿真,对于每次仿真结果均采用可视化波形图的方式直接输出。
在对仿真结果分析的基础上,不断优化仿真参数,使其最大化再现实际物理过程,并根据各个电路的性能进行参数改变从而观察结果的异同。
标签:SIMULINK;PWM;电路仿真1 桥式直流PWM变换电路简介桥式直流PWM变流器仿真实验是对全控型器件的应用。
实验电路中,前端为不可控整流、后端为开关型逆变器,此结构形式应用最为广泛。
逆变器的控制采用PWM方式。
对这个实验有所掌握的话,对后续课程设计直流调速系统也会有很大启发。
因为直流PWM-M调速系统近年来发展很快,直流PWM-M调速系统采用全控型电力电子器件,调制频率高,与晶闸管直流调速系统相比动态响应速度快,电动机转矩平稳脉动小,有很大优越性,因此在小功率调速系统和伺服系统中的应用越来越广泛。
2 桥式直流PWM变换电路的工作原理本实验系统的主电路采用双极性PWM控制方式,其中主电路由四个MOSFET(VT1~VT4)构成H桥。
Ub1~Ub4分别由PWM调制电路产生后经过驱动电路放大,再送到MOSFET相应的栅极,用以控制MOSFET的通断。
在双极性的控制方式中,VT1和VT4的栅极由一路信号驱动,VT2和VT3的栅极由另一路信号驱动,它们成对导通。
控制开关器件的通断时间可以调节输出电压的大小,若VT1和VT4的导通时间大于VT2和VT3的导通时问,输出电压的平均值为正,VT2和VT3的导通时间大于VT1和VT4的导通时间,则输出电压的平均值为负,所以可以用于直流电动机的可逆运行。
3 计算机仿真实验(1)桥式直流PWM变换电路仿真模型的建立。
根据所要仿真的电路,在SIMULINK窗口的仿真平台上构建仿真模型。
PWM逆变器Matlab仿真
PWM逆变器Matlab仿真摘要在本设计中,⾸先,针对课设题⽬要求,进⾏了系统的总体⽅案选择,以及各功能模块的⽅案论证和选择。
选择通过升压斩波电路将输⼊直流电压升⾼,再利⽤全桥逆变⽅式将直流电转换成50HZ的交流电,控制部分采⽤PWM斩波控制技术。
接着,对各功能模块进⾏了详细的原理分析和电路设计,同时也对可能出现的直流不平衡等问题进⾏了考虑。
并最终通过MATLAB来实现PWM逆变器的仿真,并进⾏结果分析,得出系统参数对输出的影响规律。
经过理论分析设计以及MATLAB仿真两种⽅式,证明了本系统可以很好地实现将输⼊110V直流转换成220V、50HZ单相交流电的设计要求,另外本设计也按设计要求采⽤了PWM斩波控制技术。
关键词:逆变;PWM控制;MATLAB仿真;DC-DC;⽬录1.设计⽅案的论证与选择 (1)1.1总体设计思路 (1)1.2 DC-DC⽅案论证与选择 (1)1.3逆变主电路的⽅案论证与选择 (2)1.4 逆变器控制⽅法的论证与选择 (3)2.设计原理及实现⽅法 (4)2.1 升压斩波电路的设计 (4)2.2 全桥式逆变电路的设计 (5)2.3 PWM控制技术及SPWM波的⽣成 (6)2.3.1 PWM控制的基本原理 (7)2.3.2 SPWM法的基本原理 (7)2.3.3 规则采样法 (8)2.3.4单极性和双极性PWM控制逆变电路分析 (9)3.MATLAB仿真及结论分析 (11)3.1升压环节的建模与仿真 (11)3.2 制作并⽣成SPWM波形 (13)3.3 逆变环节的建模与仿真(⼀) (15)3.4 逆变环节的建模与仿真(⼆) (17)3.4.1载波频率与输出电压频率改变对波形的影响 (18)3.4.2 改变负载对输出的影响 (21)4.收获与体会 (25)5.参考⽂献 (26)PWM逆变器Matlab仿真1.设计⽅案的论证与选择1.1总体设计思路由于要求的输出为220V,50HZ单相交流电,⽽输⼊却是只有110V的直流电压,所以仅仅由逆变环节不能实现,⽽应该有升压环节。
基于矢量控制的双PWM调速系统仿真分析
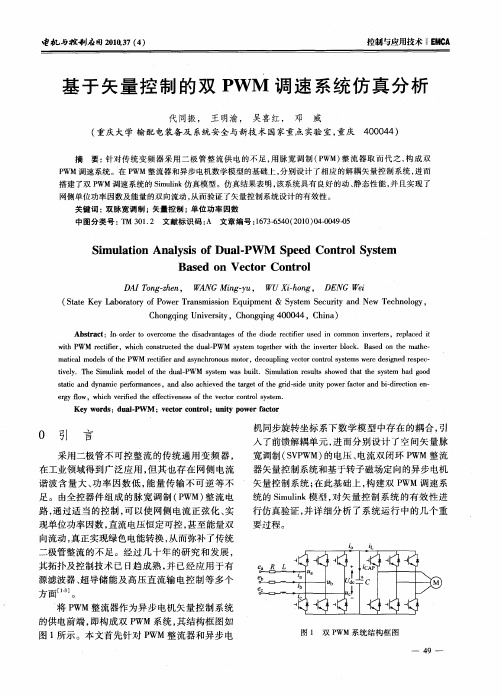
DA[ 一h n, ze WANG 一 u, y Xih n — o g, DENG i We
( tt K yL brtr o o e rn m si q imet S s m S crya dN w T c nlg , Sae e a oa y f w r a s i o E up n & yt eui n e eh o y o P T sn e t o
关 键 词 : 脉 宽 调 制 ;矢量 控 制 ; 位 功 率 因数 双 单 中 图分 类 号 : M 3 12 文 献 标 识 码 : 文章 编 号 :6 3 5 0 2 1 )404 -5 T 0 . A 17 - 4 (0 0 0 - 90 6 0
S mu a i n An l sso a — i lto a y i fDu lPW M p e n r lS se S e d Co t o y tm
wih PW M e t ir,wh c o sr t d t e du lPW M s se t g t e t h nv re l c t r ci e f i h c n tuce h a — y t m o eh rwih te i e t rb o k. Ba e n t ah — s d o he m t e
maia d l o e P M e t e n s n h o o smoo ,d c u l gv c o o t ls s msw r e i n d r s e — t l mo es f h W c t r ci ra d a y c r n u t r e o p i e trc n r y t e e d s e e p c i f n o e g t ey i l .T e S mu i k mo e ft e d a— W M y t m wa u l S mu ain r s l h w d t a h y tm a o d v h i l d l u lP n o h s se s b i . i lt e u t s o e h tt e s se h d g o t o s s t n y a c p roma c s n s c iv d t e tr e fte t i a d d n mi e fr n e ,a d a o a h e e h a g t ac l o h d sd nt o e c o n id r cin e — — ie u i p w rf t ra d b — ie t n y a o
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电气传动自动化
2004 年 第 1 期
ref ) UaO = Vref cos (ωt - θ ref Ub O = Vref cos (ωt - θ
uan = udc ( da -
*
1 ( da + db + dc ) ) 3 ( 8)
1 * ( da + db + dc ) ) ubn = udc ( db 3 1 ( da + db + dc ) ) ucn = udc ( dc 3
Ls
其中 : Vn =
1 (2 π (4 π Udc ( Sa + S b e j / 3) + S c e j / 3) ) 3
*
( 6) ( 7)
V4 T1 + V6 T2 = V Ts
di + Rs ic = Uc - udc dc - uNO dt
c
由式 ( 7) 可知 , 电压矢量通过桥臂的通断及通 断时间合成 。如何控制输入电流 ,得到理想的输入 功率因数以及实现能量的双向流动 ,根本任务在于 得到各开关管的控制规律和通断时间 。PWM 技术 已广泛应用于整流系统以提高整流器功率因数并 改善主电路电流波形 。已有的控制方案如滞环比 较法 [4 ] 、 定瞬时法 [5 ] 、 三角波比较法 [6 ] 都存在一定 的缺点 ,难于实现数字化 。为此本文基于空间矢量
Vb 、Vc 的产生是通过 PWM 实现的 , 如何得到开关
( 2) 线电流空间矢量
s + ji s Is = iα β=
( 4)
( 3) 参考电压空间矢量
Uref = Urefα + Urefβ =
2 2 ( Uref a +α Uref b + α Uref c ) ( 5) 3
在矢量控制中 ,将相电压各周期内每π/ 3 划分 一个分区 , 一个控制周期内包含 6 个分区 。首先需 要检测相电压相位 , 即过零检测 ; 然后根据三相电 压的相位判断控制矢量所处的分区 ,每个分区对应 各自不同的开关状态 ; 最后根据采集的相电压和电 流指令的大小 , 决定控制矢量的大小 , 控制矢量的 执行由分区对应的开关状态决定 。桥臂的开关状 态与空间矢量 Vn 关系如表 1 所示 。桥臂开关状态 矢量图如图 3 所示 。
2004 年 第 26 卷 第 1 期 第 18页
电气传动自动化
EL ECTRIC D RIVE AUTOMATIO N
Vol. 26 , No. 1 2004 , 26( 1) : 18~ 20
文章编号 :1005 — 7277 ( 2004) 01 — 0018 — 03
基于矢量控制的 PWM 整流器 SIMULINK 建模与仿真
( 3)
1 uNO = udc ( da + db + dc ) 3
3 空间矢量合成原理
定义如下空间矢量 : ( 1) 电网电压空间矢量
Us = Usα + jUsβ =
2 2 ( Usa +α Usc ) Usb + α 3 2 2 ( isa +α isb + α i sc ) 3
合成原理 , 利用 MAT LAB/ SIMULINK 进行建模与实 时仿真 。根据是否检测整流器的输入电流并将电 流信号作为反馈量进行控制 , PWM 整流器的控制 策略可分为直接电流控制和间接电流控制 。无论 采用间接电流控制 , 还是直接电流控制 , 控制的根 本在于控制整流器输入端电压 Va 、Vb 、Vc , 而 Va 、
如果系统希望通过矢量调制实现参考电压如 式 ( 9) 所示 。式中 Vref 为参考电压的幅值 ,θ ref 为参 考电压与输入电压的相位差 。而参考电压是通过 开关管通断及通断时间所控制的 。开关管的控制 规律如表 1 所示 [7 ] 。 假设此时控制矢量位于第 Ⅰ 扇 [8 ] 区 , 则各开关管的占空比如式 ( 10) 所示 , 其他扇 区的占空比依次类推 。可使整流桥输入端对电源 中点的电压如式 ( 11) 所示 。 ref ) Va ref = Vref cos (ωt - θ 2π ) ref Vb ref = Vref cos (ωt - θ
2
三相电压型 PWM 整流器的动态数学模
型
三相电压型 PWM 整流器的拓扑结构如图 1 所 示 , 开关等效图如图 2 所示 。高频数学模型基于整 流器开关函数的定义 ,充分反映了整流器的开关细 节和高频工作机理 , 是 PWM 整流器的精确数学模 型。 三相 VSR 的数学模型在文献[2 ]已给出 : 式中 , si 为开关函数 ,其表达式如式 ( 1) 所示 。 si = 1 第 i 相上管导通 si = 0 第 i 相下管导通
3 ( 9)
ref Vc ref = Vref cos (ωt - θ
4π ) 3
da =
1 + 2
3 Vref 2 Udc
ref + t-θ ×[cos (ω
π
6
) + sin (ω ref ) ] t-θ
db =
1 + 2
3 Vref 2 Udc
ref + t-θ ×[ - cos (ω
π
6
) + sin (ω ref ) ] t-θ
参考文献 :
[ 1] 包春雨 ,郭 静 . 火电厂辅控车间采用 DCS 技术探讨 [J ].
较大的现场总线技术 , 从而提高系统的安全性与 可靠性 。
电气传动自动化 ,2003 ,25 ( 2) :41 - 43.
5 结束语
随着科学技术的不断进步 , 化学水处理的自 动化技术高度发展 , 成熟的计算机应用技术 、网 络通讯等技术和新的设计理念应用于火电厂化 学水处理自动化中 , 组成了联网级智能自动化控 制信息系统 , 它有如下主要特点 : ① 智能化且无 人值守 , 即各个现场控制设备 ( 站 ) 根据远方指令 独立完成既定的控制任务 ; ② 网络化 , 各个分控
2004 年 第 1 期
朱俊杰 ,王 辉 ,聂卫民
基于矢量控制的 PWM 整流器 SIMULINK 建模与仿真
・ 19 ・
开关周期内的平均值代替函数本身 , 得到对时间 连续的状态空间平均模型如式 ( 2) 所示 。式中 di 为一个开关周期内开关函数 si 的平均值 , 由于开 关函数是幅值为 1 的脉冲 , 因此其平均值等于其 占空比 。
ZHU J un-jie , WANG Hui , NI E Wei-min
SIMU L INK modelin g and simulation of PWM rectifier based on vector control
( College of Electric & Information Engineering , Hunan University , Changsha 410082 , China) Abstract : The mathematical model of 3-phase PWM VSR using state space average method is studied under the high switch frequency at frist , then the rate of frequency is given using the space vector technology. Finally , the validity of the mathe2 matical model and its control method are confirmed by both MAT LAB/ SIMULINK simulation and experiment. Key words : MABLAB ; SIMULINK; PWM; VSR ; space vector ; frequency rate
i = a, b, c
式 ( 1) 是一组对时间不连续的微分方程组 , 普 通的数学方法难以求得其解析解 , 造成不连续的 原因在于开关函数的不连续性 。当开关频率很高 时 , 状态空间平均法是解决该问题的一种行之有 效的方法 [3 ] , 根据此概念 , 可以用开关函数在一个
© 1995-2005 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.
零矢量
111 111 111 111 111 111
d udc = ia sa + ib sb + ic sc - iL dt d ia + Rs ia = Ua - udc s a - uNO dt d ib + Rs ib = Ub - udc s b - uNO dt d ic + Rs ic = Uc - udc s c - uNO dt 1 udc ( s a + s b + s c ) 3 ( 1)
2004 年 第 1 期
王有会
火力发电厂化学水处理的自动化控制
・ 35 ・
厂化学水处理系统中使用 , 如具有 HART( Hi ghway
Addressable Remote Transducer) 协议的智能化仪表 、 CAN 总线 、PROFIBUS-DP 等应用范围较广且影响
制系统通过网络构成一个整体 ; ③ 资源共享信息 化 。它将是新一代功能更强大的自动化控制系 统。
函数及控制规律是本文研究的关键 。定义输入三
( 2) 可得整流器等 相相电压如式 ( 8) 所示 。 由式 ( 8) 、
效电路模型如图 4 所示 。
© 1995-2005 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.