温度PID功能块说明
PID_T使用说明
1. 功能介绍 (2)
2. 安装说明 (2)
2.1. 添加库文件 (2)
2.2. 调用PID库 (4)
3. PID库功能说明 (4)
3.1. 地址参数说明 (4)
3.2. 控制字、状态字位地址 (6)
4. 应用例子 (7)
4.1. 系统需求 (7)
4.2. 应用程序 (9)
4.3. 程序说明 (9)
1. 功能介绍
PID_T功能块是集成在CPU内部,不占用用户程序空间,作为一个库函数提供给用户使用。
PID_T主要针对温度控制的智能PID功能,带有自整定、自适功能,用户无需复杂编程,只需调用和设置一些简单的参数就可以使用,温度控制准确。
2. 安装说明
2.1. 添加库文件
在“文件”----“添加/删除库”,找到库文件“pid_t.mwl”,如下图所示。
在你存放的pid_t.mwl文件的位置,找到此文件,如下图所示,点“添加“按钮。
安装成功后,在目录树的“库“下可以看到新增加的PID_T的库:
2.2. 调用PID库
点要添加功能块的“网络”,双击“库”下面的“PID_T”,就会在“网络”里出现相应的功能块。
结果如下图所示:
3. PID库功能说明
3.1. 地址参数说明
3.2. 控制字、状态字位地址控制字的位地址意义如下:
状态字位地址的意义:
4. 应用例子
4.1. 系统需求
在这个例子里,我们以一个温区为例,系统及I/O配置表如下:
4.2. 应用程序
4.3. 程序说明
程序地址参数说明如下:。
PID使用说明
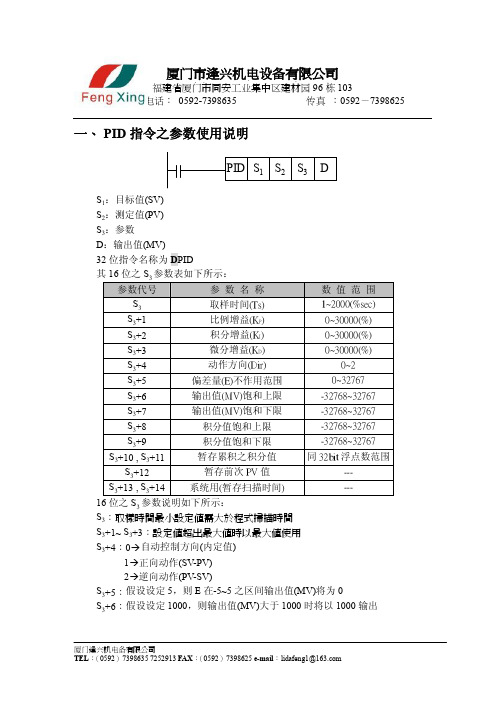
加減速命令(SV)
PID
實際加減速度 (PV = S - P)
速度偵測 裝置(P)
范例三:使用 PID 指令于温度控制时之方块图(动作方向 S3+4 需设为 1)
溫度命令(SV) PID 加溫(MV) 加熱裝置
實際溫度(PV)
溫度偵測 裝置
厦门逢兴机电备有限公司 TEL: (0592)7398635 7252913 FAX: (0592)7398625 e-mail:lidafeng1@
0 | 511 0rpm | 3000 rpm 0 | 255 0V | 5V
壓力命令值 D0
壓力命令延遲
SV D1 PID PV
MV D5
MV 轉 速度
速度 轉 電壓值 D1116
變頻器
A 波形 圖
B 波形 圖
D1110
電壓 轉 命令值
壓 力 計0 | 5110V来自| 10V命令值 280
命令值 280 250 200 150 100 50 0 B波形圖
五、范例
范例一:使用 PID 指令于一般位置或速度控制时之方块图(动作方向 S3+4 需
位置命令(SV) PID MV 受控裝置
Encoder
设为 0) 0)
速度命令(S)
PV
范例二:使用 PID 指令与变频器搭配控制时之方块图(动作方向 S3 +4 需设为
+ +
S + MV
加減速輸出(MV)
變頻器
0 | 255
M3 D40 速度命令 0rpm | 3000rpm D30+
M2=ON
D32 D31 +
速度 轉 電壓值
D1116
施耐德Temp PID function block description

1. 在 用 PL7 Pro 所 创 建 的 Premium 项 目 ( 不 适 用 于 Micro PLC ) 内 , 通 过 DFB TypesÆImport Binary…将 T_pid.UFB 导入:
2. 创建 Mast 或 Fast 任务,通过 Shift+F8 调用 DFB 功能块:
参数说明如下:
参数
变量
En T_pv Para:13
%M1 %IW5.0 %MD200:13
U_out Heat Cool
%MW10 %Q6.0 %Q6.3
Status
%MW20
参数定义:
ST
%MD200
Kp
%MD202
Ti
%MD204
Td
%MD206
Ts H_deadT C_deadT
%MD208 %MD210 %MD212
3. 首先 Create Instance 名称,如:T_pid1;并定义好相应的参数,如何定义参数参见下文:
• 功能块结构
功能块调用语法如下:
T_pid1(En,T_pv,Para:13,U_out,Heat,Cool,Status)
• 功能块参数说明
参数
类型
En T_pv
%Mi , %Ixy.i %MWi or %IWxy.i.j
Para:13 %MDi:13
U_out Heat Cool
%MWi or %QWxy.i.j %Mi , %Qxy.i %Mi , %Qxy.i
Status %MWi
属性 IN(输入) OUT(输出)
IN
IN
IN/OUT
IN/OUT OUT OUT
OUT
pid的算法功能块

pid的算法功能块一、引言PID(Proportional-Integral-Derivative)算法是一种经典的控制算法,广泛应用于工业自动化领域。
它根据系统的实际输出与期望输出之间的差异,通过比例、积分和微分三个功能块的组合,来实现对系统的精确控制。
本文将深入探讨PID算法的三个功能块,并分析其原理和应用。
二、比例控制比例控制是PID算法的第一个功能块,它根据系统实际输出与期望输出之间的差异,按照一定的比例关系来调整控制器的输出。
比例控制的作用在于保持系统的快速响应和稳定性。
当实际输出与期望输出之间的差异较大时,比例控制会给予较大的调整输出,快速消除这一差异;而当差异较小时,比例控制会给予较小的调整输出,保持系统的稳定。
三、积分控制积分控制是PID算法的第二个功能块,它根据系统实际输出与期望输出之间的积分差异,按照一定的比例关系来调整控制器的输出。
积分控制的作用在于消除系统的静态误差。
当实际输出与期望输出之间的积分差异较大时,积分控制会给予较大的调整输出,逐渐减小这一差异;而当差异较小时,积分控制会给予较小的调整输出,保持系统的稳定。
四、微分控制微分控制是PID算法的第三个功能块,它根据系统实际输出与期望输出之间的微分差异,按照一定的比例关系来调整控制器的输出。
微分控制的作用在于抑制系统的过度振荡。
当实际输出与期望输出之间的微分差异较大时,微分控制会给予较大的调整输出,抑制系统的振荡;而当差异较小时,微分控制会给予较小的调整输出,保持系统的稳定。
五、PID算法的应用PID算法在工业自动化领域有着广泛的应用,如温度控制、压力控制、流量控制等。
以温度控制为例,当实际温度与期望温度之间存在差异时,比例控制会根据差异的大小调整加热功率的大小;积分控制会根据差异的积分值调整加热功率的持续时间;微分控制则根据差异的变化率调整加热功率的变化速率。
通过这三个功能块的组合,PID算法能够实现对温度的精确控制,使其稳定在期望值附近。
PID_T使用说明

1.功能介绍 (2)2.安装说明 (2)2.1.添加库文件 (2)2.2.调用PID库 (4)3.PID库功能说明 (4)3.1.地址参数说明 (4)3.2.控制字、状态字位地址 (6)4.应用例子 (7)4.1.系统需求 (7)4.2.应用程序 (9)4.3.程序说明 (9)1. 功能介绍PID_T功能块是集成在CPU内部,不占用用户程序空间,作为一个库函数提供给用户使用。
PID_T主要针对温度控制的智能PID功能,带有自整定、自适功能,用户无需复杂编程,只需调用和设置一些简单的参数就可以使用,温度控制准确。
2. 安装说明2.1. 添加库文件在“文件”----“添加/删除库”,找到库文件“”,如下图所示。
在你存放的文件的位置,找到此文件,如下图所示,点“添加“按钮。
安装成功后,在目录树的“库“下可以看到新增加的PID_T的库:2.2. 调用PID库点要添加功能块的“网络”,双击“库”下面的“PID_T”,就会在“网络”里出现相应的功能块。
结果如下图所示:3. PID库功能说明3.1. 地址参数说明参数地址说明类型数值范围备注LOOP 属于第几个回字,常数或变量0-63路PID,不能重复。
从0开始。
CTRL_WORD 控制字,控制字,常数或变量常用控制字:1、3.2. 控制字、状态字位地址控制字的位地址意义如下:状态字位地址的意义:4. 应用例子4.1. 系统需求在这个例子里,我们以一个温区为例,系统及I/O配置表如下:4.2. 应用程序4.3. 程序说明程序地址参数说明如下:PID_T的参数说明参数地址或数值说明备注LOOP 0 因为这是第一个回路,所以是。
温度PID控制功能块FB58使用入门

15-1-22Siemens Industry Online Support - Automation Service, Automati on Support, Simatic Service, Simatic Support, Technical Support, Tech nical Consulting 自动化技术 > 自动化技术 > 工业自动化系统 SIMATIC > 工业软件 > 运行软件 > Loadable functionblocks > 标准 PID 控制温度PID控制功能块FB58使用入门1 FB58基本特性介绍在标准库(Libraries/Standard Library/PID Control Blocks)中的PID控制块中提供了两个用于温度控制的功能块FB58和FB59。
其中,FB58用于具有连续或脉冲输入信号的执行器的温度控制器,而FB59用于类似于定位电机的执行器的步进温度控制器。
除了基本的功能之外,FB58还提供P ID的参数自整定功能。
PID功能块是纯软件控制器,相关运算数据存放在相应的背景数据块中,对于不同的回路,应该使用不同的背景数据块,否则会导致PID运算混乱的错误。
FB58可以用在仅加热的温度控制回路(例如控制蒸汽的供给量来控制温度),也可以用在仅冷却的温度控制回路(例如控制冷却风扇的频率、或者冷媒的供给量来控制温度)。
如果用于冷却,则回路工作在反作用状态,则需要给比例增益参数GAIN分配一个负数,其他保持不变。
和常规PID功能块(例如FB/SFB41)对比,FB58具有如下特性:提供控制带(Control Zone)功能;控制输出提供脉冲方式;过程值转换增加对温度信号转换(PV_PER*0.1/0.01)方式的支持;参数保存和重新装载;控制器参数自整定功能;设定值变化时的比例作用弱化功能。
2 FB58基本使用2.1 功能块调用在STEP7中,提供了关于FB58和FB59的一个示例项目,其路径如下图所示:图1 FB58/59示例项目该示例项目包含有如下几个示例程序:(1)连续控制器Continuous controller输出类型是连续数值的一类控制器,其中的FB100和DB100是一个模拟的控制对象;(2)脉冲控制Pulse control OB35, OB1输出类型是单个脉冲信号的一类控制,在OB35和OB1中同时调用,其中的FB10 2和DB102是一个模拟的接收脉冲信号的控制对象;(3)脉冲控制Pulse control OB35, OB32输出类型是单个脉冲信号的一类控制,在OB35和OB32中同时调用,其中的FB1 02和DB102是一个模拟的接收脉冲信号的控制对象。
PID温控器使用说明书
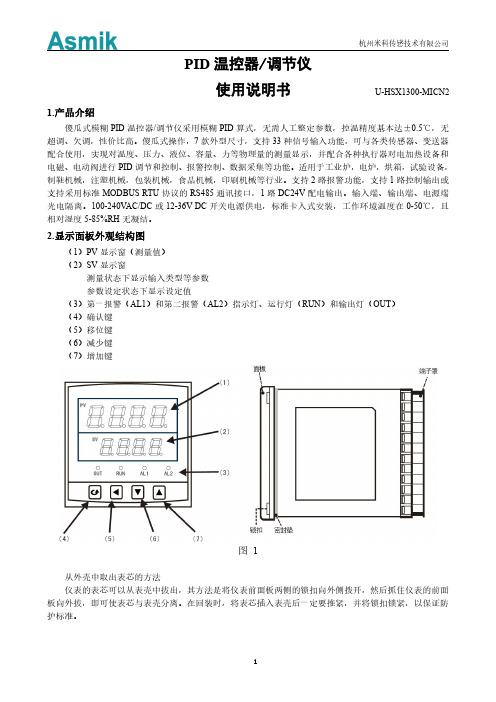
使用说明书U-HSX1300-MICN2 1.产品介绍傻瓜式模糊PID温控器/调节仪采用模糊PID算式,无需人工整定参数,控温精度基本达±0.5℃,无超调、欠调,性价比高。
傻瓜式操作,7款外型尺寸,支持33种信号输入功能,可与各类传感器、变送器配合使用,实现对温度、压力、液位、容量、力等物理量的测量显示,并配合各种执行器对电加热设备和电磁、电动阀进行PID调节和控制、报警控制、数据采集等功能。
适用于工业炉,电炉,烘箱,试验设备,制鞋机械,注塑机械,包装机械,食品机械,印刷机械等行业。
支持2路报警功能,支持1路控制输出或支持采用标准MODBUS RTU协议的RS485通讯接口,1路DC24V配电输出。
输入端、输出端、电源端光电隔离。
100-240VAC/DC或12-36V DC开关电源供电,标准卡入式安装,工作环境温度在0-50℃,且相对湿度5-85%RH无凝结。
2.显示面板外观结构图(1)PV显示窗(测量值)(2)SV显示窗测量状态下显示输入类型等参数参数设定状态下显示设定值(3)第一报警(AL1)和第二报警(AL2)指示灯、运行灯(RUN)和输出灯(OUT)(4)确认键(5)移位键(6)减少键(7)增加键图1从外壳中取出表芯的方法仪表的表芯可以从表壳中拔出,其方法是将仪表前面板两侧的锁扣向外侧拨开,然后抓住仪表的前面板向外拔,即可使表芯与表壳分离。
在回装时,将表芯插入表壳后一定要推紧,并将锁扣锁紧,以保证防护标准。
外形尺寸开孔尺寸外形尺寸开孔尺寸160*80mm(横式)152*76mm48*96mm(竖式)45*92mm 80*160mm(竖式)76*152mm72*72mm(方式)68*68mm 96*96mm(方式)92*92mm48*48mm(方式)45*45mm 96*48mm(横式)92*45mm3.接线图2规格尺寸为A、B、C、D、E型接线图注:横竖式仪表后盖接线端子方向不一样,见示意图3图3图4规格尺寸为F型接线图图5规格尺寸为H型接线图注1:上述接线图中在同一组端子标有不同功能的,只能选择其中一种功能。
PID功能块说明
PID功能块说明PID(Proportional-Integral-Derivative)是一种经典的控制算法,用于自动控制系统中的比例、积分和微分操作,以控制输出信号使其与期望值保持一致。
PID控制器在工业自动化中得到广泛应用,以提高系统的稳定性和准确性。
PID控制器由三个主要功能块组成:比例(P)、积分(I)和微分(D)。
每个功能块根据不同的控制需求进行参数调整,以获得最优的控制效果。
比例(P)功能块通过将输出信号与期望值的差异进行放大,产生一个与误差成正比的控制量。
比例增益参数决定了比例控制的放大程度,较大的比例增益可以加快响应速度,但可能导致系统不稳定。
较小的比例增益可以提高系统稳定性,但可能导致响应速度变慢。
积分(I)功能块通过对误差的积分,消除稳态误差。
积分增益参数决定了积分控制的放大程度,较大的积分增益可以减小稳态误差,但可能导致超调或震荡。
较小的积分增益可以提高系统的稳定性,但可能导致较大的稳态误差。
微分(D)功能块通过对误差的微分,预测系统的未来变化趋势,从而抑制系统的超调和震荡。
微分增益参数决定了微分控制的放大程度,较大的微分增益可以减小超调和震荡,但可能导致系统响应速度变慢。
较小的微分增益可以提高系统响应速度,但可能导致超调和震荡。
PID控制器工作原理如下:首先,计算当前的误差(当前值与期望值之差),然后根据比例、积分和微分的功能块分别计算对应的控制量,并将它们加权求和作为最终的控制输出。
这个过程是连续进行的,以实现对系统输出的精确控制。
PID控制器的参数调整是一个复杂的过程,需要考虑到系统的动态特性、稳定性需求和控制目标等因素。
常用的调参方法包括手动调参和自动调参。
手动调参是通过观察系统响应特性,并根据经验和技巧进行参数调整。
这种方法需要丰富的经验和专业知识,通常需要多次试验和调整才能获得最佳的参数配置。
自动调参是通过使用专门的算法和工具,根据系统的数学模型和实时数据进行参数优化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
温度PID功能块说明
功能块介绍:
功能块集成了PIDAT和TPO指令,将输入值经过PID运算后,以脉冲输出方式对外部加热设备进行控制。
功能块截图:
参数说明:
实例应用:
1、对功能块地址进行定义
2、设置输入参数
温度传感器数据在2通道,当前温度为22度(16 hex)
设定的加热温度为60度(3C hex)
最大设定值1300度(0514 hex)最小设定值-200度(FF38 hex)即温度传感器的测量范围(注:请保证所有的温度设定为相同的单位,如果传感器采样精度为0.1℃,当前温度则会变为220,此时目标温度请设定为600,代表60℃。
对应的最大设定温度值也依此比例放大)R的控制周期设为1秒即100个单位0064 hex
EN_Output为控制实际输出的使能条件,用于保证功能块关闭时可以停止实际输出。
迟滞值设置为无迟滞
3、启用功能块,执行自整定。
将W0.00和W1.01置1
AT_Status 为1,说明在自整定中
自整定完成后该位会置0,并且得出PID参数,开始PID控制。
如果需要手动修改PID值,则填入In_P In_I In_D 三个参数,再将为Change置一。
改变PID值后,指令将按照新的PID值进行控制。
4.直接使用已有的PID参数启动PID功能块:
由于不执行AT指令,P,I,D内的值为‘0’,所以PID_Error 置1,故障代码#0601。
需要添加以下程序自动复位#0601的错误,并且输入设定好的PID参数。
功能块可以正常运行。