船舶柴油机变论域模糊PID转速控制研究
船舶可调桨螺距模糊PID控制器设计

t he c o n t r o l l a bl e pi t c h pr o pe l l e r
WA NG G u o - j i n , WA NG J i o n g , D AI J i n - p e n g , J I A N A n — a n
关键 词 :模 糊 P I D控 制 理 论 ; Ma t l a b 仿 真 ;可 调 桨 ;运 动 模 型 中 图分 类号 :T P 3 9 1 文 献 标 识 码 :A d o i :l 0 . 3 4 0 4  ̄ . i s s n . 1 6 7 2 —7 6 1 9 . 2 0 1 7 . 0 4 . 0 2 0
Ab s t r a c t : I n v i e w o f t h e c o n t r o l l a b l e p i t c h p r o p u l s i o n s y s t e m d r i v i n g b y t h e d i e s e l e n g i n e , i t i s n e c e s s a r y t o e s t a b l i s h
a n g l e o f k i n e ma t i c s a n d d y n a mi c s . At t h e s a me t i me , t h e f u z z y P I D c o n t r o l l e r i s d e s i g n e d o n he t Ma t l a b s i mu l a t i o n p l a t f o r m b y t h e f u z z y t h e o y r a n d P I D t h e o r y . T h e c o r r e s p o n d i n g p i t c h d e v i a t i o n , t h e d e v i a t i o n r a t e a n d p i t c h c o n t r o l o u t p u t d a t a a r e g o t t o ma t c h t h e d y n a mi c p e r f o r ma n c e o f c o n t r o l l a b l e p i t c h p r o p e l l e r . A l o o k u p t a b l e o f t h e f u z z y c o n t r o l l e r o u t p u t i s g o t b y
基于参数自整定模糊PID的船舶控制

a 当 较 大 时 ,取较 大 的 与较 小 的k ,使 系 )
统具 有较 好 的跟踪 性 能 ,同时 为避 免 出现 较大 的超
过 于敏感 ,容易 引起 频繁 操舵 ,缺乏对 船 舶动 态特 性及海 况变 化 的适应 能力 , 自适 应 自动 舵实 现成 本
调 ,应对 积分 作用 加 以限制 ,通 常取k ; 0
b s a d sa i t n h r n i o r c d r i n u e f o c l t n c n b e u e r a l sn u t n tb l y a d t e ta st n p o e u e t i i me a d n mb r o s i ai a e r d c d g e t u i g l o y
paa t r o lne I h s r p d e po e p e a d i l o e s o t Th c nto s se r me e s n i . t a a a i r s ns s e d n a l t e v r h o . e o r l y t m h s sr n o t a a to g r —
维普资讯
CMUITNS N RITNSE o9 ・ 汔 车 与 船 舶 OMNAOST D DAOIU . C I A A Z I S N1 5
基 于 蓥数 自整定楱 糊P D的船舶控 制 I
于 风 卫
( 岛 远 洋船 员学 院机 电系 , 山东 青 岛 2 6 7 ) 青 6 0 1
使控制 效果 难 以保证 。模 糊控 制 是建立 在人 工经 验
较 小 ,J应取 小 一 些 ,该情 况 下 ,J 的取 值 对 系 统 ] } 。 ] } 响应 影 响较大 。 的取值 要适 当 ; 与k均 应 取 大些 ,同 时 为避 免 系统 在 设 定 值 附 近
船舶柴油机缸套冷却水温度模糊PID自适应控制及仿真

船舶柴油机缸套冷却水温度模糊PID自适应控制及仿真凌双明1,2(1. 湖南大学,湖南长沙 410082;2. 长沙航空职业技术学院,湖南长沙 410000)摘要: 船舶柴油机的冷却控制本质是一种热力学数学模型,需要对柴油机各部件(柴油机缸,冷却阀,柴油发送机)的热传导进行分析;同时,由于各部件之间的传导损耗及海上变换的气候环境,船舶柴油机的冷却控制具有非线性特征。
本文在研究船舶柴油机冷却系统的数学模型基础上,针对各部件传导特性提出一种柴油机缸套冷却水温度模糊PID自适应控制策略,最后利用Matlab软件对控制系统进行仿真,结果表明控制效果达到理想效果。
关键词:PID控制;模糊自适应;遗传算法中图分类号:U664.121 文献标识码:A文章编号: 1672 – 7619(2017)6A – 0093 – 03 doi:10.3404/j.issn.1672 – 7619.2017.6A.031Fuzzy PID adaptive control and Simulation of cooling water temperature ofmarine diesel engine cylinder linerLING Shuang-ming1,2(1. Hunan University, Changsha 410082, China;2. Changsha Aeronautical Vocational and Technical College, Changsha 410000, China)Abstract: The cooling control of marine diesel engine is a thermodynamic mathematical model. It is necessary to ana-lyze the heat transfer of diesel engine parts (diesel engine cylinder, cooling valve, diesel generator). At the same time, the cooling control of marine diesel engine is nonlinear due to the loss of transmission between the components and the sea en-vironment. In this paper, based on the mathematical model of marine diesel engine cooling system, a fuzzy PID adaptive con-trol strategy is proposed for the cooling water temperature of diesel engine cylinder, finally, the control system is simulated by MATLAB software, and the results show that the control effect is satisfactory.Key words: PID control;fuzzy adaptive;genetic algorithm0 引言随着航海业的发展,运输船舶的动力系统越来越强,伴随的是柴油机单位发热量过大,如何保障船舶柴油机的冷却达到设定的控制效率成为保障船舶持续航行的关键。
船舶柴油机转速模糊神经网络PID智能控制

船舶柴油机转速模糊神经网络PID智能控制
徐红明;吴震;周波;周微
【期刊名称】《舰船科学技术》
【年(卷),期】2022(44)21
【摘要】为了提高常规PID控制器在非线性、时变不确定性系统中的控制性能,提出一种模糊神经网络PID控制算法,利用模糊控制良好的非线性控制优势,以及神经网络超强的自学习、自适应特性,实现对PID参数的实时在线整定,并建立船舶柴油机转速模糊神经网络PID控制系统数学模型,利用Matlab/Simulink进行仿真。
仿真结果表明,模糊神经网络PID控制超调量少、精度高、调节时间短,具有更好的动静态特性和抗干扰特性,系统鲁棒性有了很大提升,能很好地满足船舶柴油机转速控制系统的要求。
【总页数】5页(P101-105)
【作者】徐红明;吴震;周波;周微
【作者单位】浙江交通职业技术学院海运学院;浙江理工大学机械与自动控制学院;浙江工业大学信息工程学院
【正文语种】中文
【中图分类】U664.121;TK427
【相关文献】
1.基于多目标遗传算法和多属性决策的船舶柴油机转速PID控制器参数优化
2.船舶柴油发电机组转速的模糊RBF神经网络PID控制
3.船舶柴油机转速智能控制系
统仿真4.神经网络与参数自寻优PID在柴油机转速控制系统中的应用5.船舶用柴油机转速智能控制系统设计与实现
因版权原因,仅展示原文概要,查看原文内容请购买。
船舶柴油机缸套冷却水温度模糊PID自适应控制及仿真
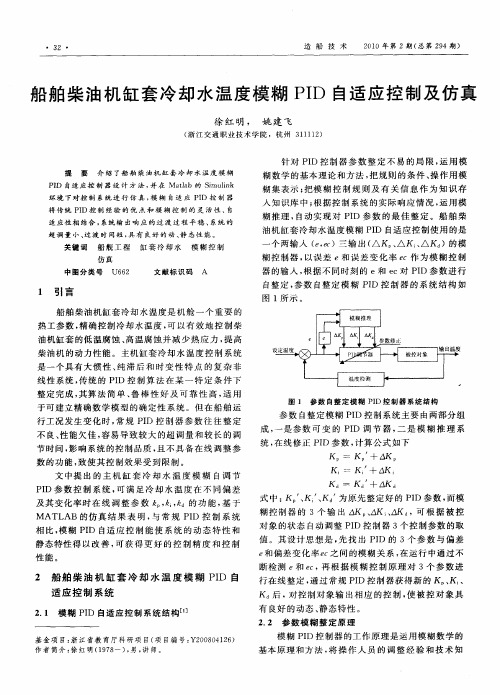
断检测 e e , 和 c 再根 据模 糊 控制 原理 对 3个 参数 进
2 船舶柴油机缸 套冷却 水温度 模糊 PD 自 I 适 应控 制 系统
21 模糊 PD 自适应控 制系统结构[ . I 1
行 在 线 整 定 , 过 常 规 P D 控 制 器 获 得 新 的 K。 K 、 通 I 、
图 1所 示 。
l 引 言
船舶 柴油机 缸套冷却 水温度是 机舱 一个 重要 的 热工参数 , 精确控 制冷却水 温度 , 可以有效 地 控制 柴 油机缸套 的低温腐 蚀 、 温腐蚀并 减少 热应力 , 高 高 提
柴油机 的动力性能 。主机缸套 冷却水 温度 控制 系统
是 一 个 具 有 大 惯 性 、 滞 后 和 时 变 性 特 点 的 复 杂 非 纯
K 后 , 对控制对 象输 出相 应 的控 制 , 被 控对 象 具 使
有 良好 的动态 、 态特性 。 静
2 2 参 数 模 糊 整 定 原 理 .
基 金项 目: 江省 教 育 厅科 研 项 目( 目编 号 : 0 8 4 2 ) 浙 项 Y2 0 0 1 6 作 者 简介 : 红 明( 9 8 ) 男 , 师 。 徐 17一 , 讲
Hale Waihona Puke 模糊 P D控 制器 的工 作原理 是运用模 糊数学 的 I 基本 原理 和方法 , 操作 人 员 的调 整 经验 和 技术 知 将
徐 红 明 , : 船 舶 柴 油 机缸 套 冷 却 水 温度 模 糊 P D 自适 应控 制及 仿 真 等 I
识 总 结 成 为 I 条 件 ) HE 结 果 ) 式 的 模 糊 规 F( T N( 形
e 偏 差 变 化 率 e 之 间 的模 糊 关 系 , 运 行 中 通 过 不 和 c 在
船舶动力定位系统模糊PID控制算法研究

Re e r h o z y PI Co r lAl o ih f s a c n Fu z D nt o g r t m o
维普资讯
第 3卷 第 4期 20 0 8年 8月
中 国
舰
船
研
究
V 13 N . o. o 4
Aug 2 08 . 0
船 舶动 力定 位系统模糊 P D控制算法研究 I
徐 阳 俞 孟 蕻
江 苏科技 大 学 电子信 息 学院 , 江苏 镇江 2 2 0 103
Afe n l zn h h r ce it so D o to n u z o to ,t e i f nc ft I a a e t ra ay i g t e c a a t rsi fPI c n r la d f z y c nr l h n l c ue e o he P D p r m — tr ha g n s se p ro ma c sc n i e e e g c n e o y tm e f r n ewa o sd r d. Ree rn o t e i e lo u z o to ,t em eh f rig t h d a ff zy c nr l h t 一
问 题 。
部分 是 船 舶 的高 频 运 动 ( . 0 3~1 6 rd s , . a / ) 它 统 , 制器 也 不控 制 这 部 分 的运 动 。因 为这 部 分 控
是 由一 阶波 浪 引起 的 , 这部 分 运 动 不 反馈 控 制 系 运 动仅 造成 船舶 的振 荡 , 会造 成船 舶 的位移 ; 不 第 பைடு நூலகம்
基于变论域插值模糊PID控制系统的研究与应用

s se o e la —h a s ma h n ,a n ep lt n ag r h u z — I o t l ri d s n d a d d v lp d o y tm f h o d s e r t t c i e n i tr oa i l o i m f z y P D c n r l s e i e n e e o e n t e o t oe g
t a i fv ra l n v re.Vai b e u ie s nd d u l —i e ri tr oai n ag rt o e t n u a i r u c he b ss o a ib e u i e s ra l n v re a o b e ln a n e l t lo i p o hm fr ca g l rbnay f n — t n a e a o t d t ov h r b e o o a p i z to n u d b h e -e u a in o e e a D aa tr , i r d p e o s l e t e p o l m fl c lo tmiain i c  ̄e y t e s r r g l t fg n r lPI p r me e s o f o wh c a a t e h v r l o tmiai n o y tm o to r me e sa d s le h r b e o ih-r cso t e - ih g r n e s te o e a l p i z t fs se c n r lpaa tr n ov st e p o lm fhg ・ e iin o h r u o p - wie u at ia l t i h n v re o ie u e .T sg r c s ft e p e s r y t m s d o ntr o ain s n tan b e wi n t e u ie s fg v n r ls hede in p o e so r s u es se ba e n i e p lto h h ag rt m u z — D o tol ri lo g v n On s o x rme s s o t a h e u to h n e oai n ag rt m lo i h f z y PI c nr l sa s ie . e — p t e pe i nt h w h tte r s l f te i tr lto o i p l h f z y PI c n r lb s d o a i be u ie s sb t rt a h to e r lf z y PI c nr le u z — D o to a e n v ra l n v re i e t h n t a fg nea u z — D o tolr,a d a p i g t e i — e n do tn h n t r oa in ag rtm u z — I c n r lb s d o a ib e u v re c n e s r h v r l tb lt n o to r c ・ e lto lo i p h fz y- D o to a e n v ra l nie a n u e t e o e alsa ii a d c n r lp e i P s y - so ft y tm ,a d ef c iey o e c me se d t t ro n h t rp e o n n. i n o he s se n f t l v r o ta y sa e e r ra d c at h n me o e v e Ke r y wo ds:l a s e r t s c ne;v ra l n v re; d u l —i e r i tr o a in lo i m f b n r u ci n; o d—h a e tma hi ai b e u ie s o b e ln a n e lto ag rt p h o iay fn t o
变论域自适应模糊PID控制器设计探讨

变论域自适应模糊PID控制器设计探讨发布时间:2021-05-18T03:06:50.233Z 来源:《中国电业》(发电)》2021年第2期作者:陈正一[导读] 探讨了一种比较先进且实用的变论域自适应模糊PID控制方法,现就此探讨如下。
大连国际机场集团有限公司摘要:本文围绕大时滞、时变系统,探讨了一种以变论域模糊控制理论以及模糊PID控制原理为基础的变论域自适应模糊PID控制方法;此方法与变论域模糊控制器、常规模糊IPD控制器所具有的优点相结合,借助论域对模糊PID控制器参数进行调整,以此来提高精度与范围,最终得知,其无论是在自适应能力上,还是在鲁棒性能上,均比较突出,本文先就其具体的设计思路作一剖析,望能为此领域研究提供些许借鉴。
关键词:变论域;自适应控制;设计;模糊PID控制伴随科学技术水平的不断提升,许多先进技术在变论域自适应模糊PID控制器中得到广泛应用,有力推动着此领域的发展与完善;因模糊控制对被控对象所对应的精确数学模型没有依赖性,仅需根据现场操作人员、专家的知识、经验或操作数据,构建与之相匹配、相适应的语言变量控制规则,所以,在非线性系统、大时滞系统以及不确定性系统当中,发挥着重要作用。
但需要指出的是,因模糊控制器(误差e),仅与传统的PD控制器相当,所以常规模糊控制自身具有不高的控制精度以及有限的自适应能力。
针对模糊PID控制来讲,其能够较好的将模糊控制的控制精度问题给予有效解决,但是其模糊规则仅是在开始的过渡过程当中发挥作用,而在有比较小的误差时,PID参数通常较难调准,并且PID对纯滞后此种非线性特性不起作用。
本文在模糊PID控制当中应用变论域模糊控制理论,探讨了一种比较先进且实用的变论域自适应模糊PID控制方法,现就此探讨如下。
1.变论域模糊的理论分析变论域的基本思想为:基于规则形式不变的状态下,论域伴随误差的变小而随之收缩,也就是能够伴随误差的增大而呈现随之扩展的趋势。
从局部从面来考量,论域收缩好似增加规划,也就是插值结点加密,以此促进精度的大幅提升。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
重庆大学硕士学位论文船舶柴油机变论域模糊PID转速控制研究姓名:尹玲玲申请学位级别:硕士专业:系统工程指导教师:熊庆宇2010-04重庆大学硕士学位论文中文摘要摘 要由于计算机技术、总线技术、控制技术、网络技术等飞速发展,计算机在船舱自动化中的应用变得越来越广泛,尤其是在信息交换、实时控制和控制算法仿真领域的应用更为突出。
随着我国船舶信息技术的飞速发展,基于现场总线技术和组态软件的网络构架已经能够实现船舶航行过程的一体化和自动化,它能代替轮机员正确地实现对机舱中的主辅机等设备和各个子系统的巡视管理、监视、和控制。
本文在船舱自动化网络系统建立的基础上,对船舶柴油机系统的数学建模和控制算法进行了深入细致的研究。
针对船舶柴油机系统的特点,以变论域模糊控制和PID控制相结合设计了变论域模糊PID控制器,并基于船舶自动化网络,搭建了柴油机半实物网络仿真平台及上位机监控系统,实现了系统的实际运行。
首先,本文以MATLAB/SIMULINK软件为平台,建立了柴油机的平均值模型,然后针对该被控对象,进行了控制算法的设计。
根据传统PID控制在船用柴油机转速控制上的不足,设计了基于变论域的模糊PID控制器。
该控制器不仅实现了PID 参数的在线自整定,还较好的提高了船用柴油机转速控制器的控制性能。
仿真结果表明,变论域模糊PID控制器在系统超调量、响应时间上都有明显的改善。
最后,在研华工控机的MATLAB/RTW环境下建立了柴油机实时仿真平台,利用该平台来替代真实的柴油机对象。
通过接入DSP控制器、ANYCAN节点和整个船舱以太网-CAN网络构建了柴油机半实物网络仿真系统,上位机利用iFIX组态软件实现了柴油机系统运行状况的实时监控。
本文的研究工作为后期的实船试验打下了基础,更为重要的是提出了一种实现船舶柴油机转速控制的较为先进的控制策略,为后继研究者提供了理论和技术支持,缩短了开发周期,对船舶柴油机电控技术的发展必将起到积极的推动作用。
关键词:船舶柴油机,转速控制,平均值模型,变论域模糊PID,iFIXABSTRACTAs the rapid development of computer technology, bus technology, control technology, and network technology, computer has been largely applied in cabin automation systems, especially in the exchange of information, real-time control, and control algorithm areas. With rapid development of Chinese shipbuilding industry, the framework which is based on field bus and configuration software has already been applied in navigation. This system can replace the engineer to act as patrol manager, monitor, and controller.The mathematical model of marine diesel as well as speed control algorithms have been thoroughly researched in this paper. With the combination of PID control and fuzzy logic control, the variable universe fuzzy PID controller has been proposed. Besides, a semi-physical simulation platform as well as a monitoring and control system have also been built, which has already been realized in the simulation system.At first, the average model of marine diesel has been built in MATLAB/SIMULINK. And then, according to such model, some studies on the control algorithms have been conducted. A variable universe fuzzy controller has been designed according to the short points of conventional PID controller as well as the fuzzy logic controller. This variable universe fuzzy PID can not only self-regulate the parameters but also ameliorate the control performances. Comparing with the simulation results of conventional PID control, this variable universe fuzzy PID control has a large improvement in overshot as well as response time. At last, the MATLAB/RTW real-time system has been built in Advantech IPC, which is applied to replace the real marine diesel system. And the whole semi-physical simulation platform is composed of this RTW system, DSP controller, ANYCAN nodes, as well as the whole Internet-CAN network. In the host computer, iFIX configuration software is adopted to design the whole monitor and control interface.The research of this paper is considered as the basis for the test of practical cabin system. And more important, a comparative new algorithm for marine diesel speed control is proposed. This research for marine diesel speed controller would no doubt provide theoretical as well as technological support for the later studies, which can shorten the development cycle, and play a positive role for the diesel electronic control technology.Keywords: Marine Diesel, Speed Control, Average Model, Variable Universe FuzzyPID Control, iFIX1 绪 论1.1 课题的背景及意义随着计算机技术特别是微机技术的高度发展,带动了该技术在船舶上的日益发展和广泛应用[1]。
展望21世纪船舶自动化技术,将不断向全船综合自动化这个高层次阶段发展,船舶综合自动化,是集机舱自动化、航行自动化、信息一体化、装载自动化等于一体的多功能综合系统[2,3],该系统通常由二个工作母站、若干个分控制系统及若干个工作分站组成,通常一个工作母站设在机舱控制室另一个设在驾驶室。
两个工作母站完全独立,可同时或单独操作,并互为备用。
分控制系统将根据船舶的种类和自动化的程度而定,例如主机遥控、机舱监测报警、电站管理、泵浦控制、液位遥测和压载控制,冷藏集装箱监控、自动导航等。
所有工作母站和分控制系统采用高速传输技术组成一个综合网络系统,在网络上根据需要连接一定数量的工作分站,以达到在船舶重要部位对各设备进行监测、控制和操纵等目的。
同时,其工作分站可以作为一个窗口,与船舶对外通信设备联网,借助于数据传输、电子邮件等各种通信手段,执行岸与船,船与船之间对话,进行各种信息交流;咨询、设备维护、故障诊断、资料查阅、备件查询、船舶管理等业务活动,从而最大程度地提高船舶航行的安全性、可行性和经济性[4]。
船舶工业是国家重点发展的战略工程,未来十年是中国船舶工业发展的关键时期,国内外船舶工业的发展与造船业格局的变化,为重庆市发展中小型特种船舶制造业,做大做强船舶配套产业提供了良好的契机。
重庆市“十一五”特种船舶重大专项旨在适应我市经济和船舶工业市场发展的重大需求,针对重庆市特种船舶与船舶配套业急待解决的科技问题,研究特种船舶设计制造与船舶配套装备的关键技术,促进现代造船模式的转换,提高重庆市特种船舶设计、先进制造技术和船舶配套的创新能力,为将船舶制造业打造成为支撑重庆市经济增长和促进社会发展的第三大支柱产业,将重庆建设成为国内外知名的中小型特种船舶生产基地和重要的船舶配套产业基地奠定基础。
本课题基于现场总线的船舶机舱自动化监控网络原型,研发出具有柴油机主机监控的船用机舱自动化系统,系统检测报警准确率>98%。
而柴油机电子转速控制系统是船舶自动化系统中的一个重要子系统,实现对柴油机转速的稳定快速控制、柴油机子系统运行参数监控是整个系统的关键。
1.2 系统总体结构概述1.2.1 系统实际结构船舶机舱自动化系统总体结构如图1.1所示,本课题主要考虑主柴油机系统,实际系统中同时包含了舵机系统并提供了其它子系统的接口,用户可以按需要接入。
柴油机和舵机子系统的过程参数、设备开关量可以通过AnyCAN嵌入式节点的AI和DI接口送入CAN总线,然后通过CANET网关送到上位机iFIX软件环境进行集中监测。