1模糊控制器的基本结构和组成
基于PLC的模糊控制设计
4.数据处理
现代PLC具有数学运算(含矩阵运算、函数运算、逻辑运算)、数据传送、数据转换、排序、查表、位操作等功能,可以完成数据的采集、分析及处理。这些数据可以与存储在存储器中的参考值比较,完成一定的控制操作,也可以利用通信功能传送到别的智能装置,或将它们打印制表。数据处理一般用于大型控制系统,如无人控制的柔性制造系统;也可用于过程控制系统,如造纸、冶金、食品工业中的一些大型控制系统。
(2)PLC在闭环过程中应用日益广泛.
(3)不断加强通讯功能。
(4)新器件和模块不断推出。高档的PLC除了主要采用CPU以提高处理速度外,还带有处理器的EPROM或RAM的智能I/O模块、高速计数模块、远程I/O模块等专用化模块。
(5)编程工具丰富多样,功能不断提高,编程语言趋向标准化。有各种简单或复杂的编程器及编程软件,采用梯形图、功能图、语句表等编程语言,亦有高档的PLC指令系统。
(三)系统的设计、建造工作量小,维护方便,易于改造.
PLC用存储逻辑代替接线逻辑,大大减少了控制设别外部恩德接线,是控制系统设计及建造的周期大为缩短,同时维护也变得更为容易。更重要的是使用同一设备经过改变程序改变生产过程成为可能。这很适合多品种、小批量生产。
模糊控制算法简介
1
NB NM NS
ZO
PS
PM PB
Ai ( x) e
~
其中,ai为函数的中心值,bi为函数的宽度。 假设与{PB,PM,PS,ZO,NS,NM,NB}对应的高斯基函数的中心值分别 为{6,4,2,0,-2,-4,-6},宽度均为2。隶属函数的形状和分布如图所示。
Research Center of Intelligent System and Intelligent Software, (CSU)
因而,通常在输入较大的区域内采用低分辨率曲线(形状较缓),在输 入较小的区域内采用较高分辨率曲线(形状较尖),当输入接近零则选 用高分辨率曲线(形状尖)。
Research Center of Intelligent System and Intelligent Software, (CSU)
14
3.2 模糊控制器的结构和设计
x
③ 梯型
x a b a , a x b 1, bxc Ai ( x) d x ~ d c , c x d 0, else
NB NM 1 NS ZO PS PM PB
0 -6
-4
-2
0
2
4
6
x
Research Center of Intelligent System and Intelligent Software, (CSU)
模糊推理
Research Center of Intelligent System and Intelligent Software, (CSU)
6
3.2 模糊控制器的结构和设计
3.2.1 模糊化接口
模糊化就是通过在控制器的输入、输出论域上定义语言变量,来将精确的输入、 输出值转换为模糊的语言值。
模糊控制
目录摘要 (1)1.模糊控制简介 (3)1.1模糊控制的历史背景 (3)1.2模糊控制的基本原理 (4)1.3模糊算法的四个步骤 (4)2.基于单片机的液位模糊控制器的设计 (5)2.1设计的基本原理 (5)2.2设计的基本步骤 (5)2.3.设计的基本内容 (6)2.3.1模糊控制器的结构设计 (6)2.3.2模糊控制规则的设计 (7)2.3.3模糊推理及其模糊量的非模糊化方法 (9)2.4模糊控制器的程序实现 (10)2.5程序编写中的几点说明 (11)3.程序流程图 (12)4.液位控制部分 (13)5.设计小结 (13)参考文献 (14)摘要随着科技的不断进步,工业生产过程已经向大型化、精细化、现代化以及复杂性发展,一般的常规控制方法已经不能满足实际生产的需求。
智能型控制算法应运而生,在众多的算法中,模糊控制算法利用计算机来实现人的控制经验,是模糊理论与计算机技术、自动化技术相结合的产物,由于其良好的控制特性而得到了广泛应用。
本报告对模糊控制基于单片机对液位的控制理论及其智能优化控制策略和方法上作出详尽的研究,建立了一种控制系统。
在系统的构建中,应用单片机89C51做为核心控制部分,采用模糊控制算法进行控制。
控制系统根据设定值将得到的实际位置和偏差变化率进行模糊化,建立模糊控制规则表,将优化后的参数变化量,在模糊控制器的控制下实现转动控制。
通过对常规控制器、纯模糊控制器和具有自整定功能的模糊控制器进行仿真对比。
关键词:模糊控制、自动化技术、优化控制。
AbstractThe abstract along with the technical unceasing progress, the industrial production process already to the large scale, the fine refinement, the modernization as well as the complex development, the general convention control method already could not satisfy the actual production the demand.The intelligence control algorithm arises at the historic moment, in the multitudinous algorithms, controls the algorithm to realize human's control experience fuzzily using the computer, is product which the fuzzy theory and the computer technology, the automated technology unify, obtained the widespread application as a result of its good control characteristic.This report makes the exhaustive research to the fuzzy control based on the monolithic integrated circuit to the fluid position control theory and in the intelligent optimization control strategy and the method, has established one kind of control system.In the system construction, does using monolithic integrated circuit 89C51 for the core control section, uses the fuzzy control algorithm to carry on the control.The control system the physical location and the deviation rate of change which obtains according to the setting value carries on the fuzzy, establishes the fuzzy control rule table, will optimize after the parameter change quantity, will realize the rotation control in under the fuzzy controller control.Through to the conventional controller, the pure fuzzy controller and has the self regulating to decide the function the fuzzy controller to carry on the simulation contrast.Key word: Fuzzy control, automated technology, optimized control.1.模糊控制简介1.1模糊控制的历史背景1965年美国自动控制理论专家L A Zadeh首次提出了模糊集合,1974年英国E H Mamdani首先将模糊控制应用于锅炉和蒸汽机的自动控制。
模糊控制3
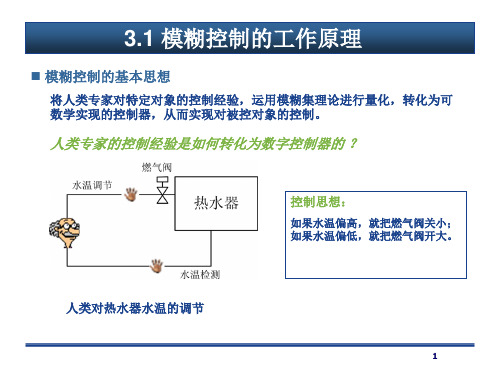
模糊控制的基本思想
将人类专家对特定对象的控制经验,运用模糊集理论进行量化,转化为可 数学实现的控制器,从而实现对被控对象的控制。
人类专家的控制经验是如何转化为数字控制器的 ?
控制思想:
如果水温偏高,就把燃气阀关小; 如果水温偏低,就把燃气阀开大。
人类对热水器水温的调节
1
3.1 模糊控制的工作原理
x
清晰的隶属函数分布
14
3.2 模糊控制器的结构和设计
• 完备性 属函数的分布必须覆盖语言变量的整个论域,否则,将会出现“空档”, 从而导致失控。
NB NM NS ZO PS PM PB
1
0 -6 -4 -2 0 2 4 6 x
空档
不完备的隶属函数分布
15
3.2 模糊控制器的结构和设计
模糊化过程小结:
1)在隶属度最大的模糊值之间任取一个; 例如当E*=-5时,A*=NB或NM。
NB NM NS ZO PS PM PB 1
0
-6 -5 -4 -2 0
2
4
6x
2)重新定义一个模糊值,该模糊值对于当 前输入精确量的隶属度为1,对于其它精确 量的隶属度为0。
1
0
-6 -5 -4 -2 0
2
4
6x
A* 0 1 0 0 0 0 0 0 0 0 0 0 0 ~ 6 5 4 3 2 1 0 1 2 3 4 5 6
规则库也可以用矩阵表的形式进行描述。 例如在模糊控制直流电机调速系统中,模糊控制器的输入为E(转速误差)、EC (转速误差变化率),输出为U(电机的力矩电流值)。
在E、EC、U的论域上各定义
了7个语言子集:
U
EC
模糊控制理论和简单应用讲解

具体设计如下
• (1)确定模糊控制器的输入和输出量 • 在本设计中的模糊PID控制器中采用"两入三出"的形式,将两个
输入变量经过模糊推理,模糊运算和反模糊化的过程得到供常规 PID控制器进行参数调节的 △Kp,△Ki,△Kd 。 • 在实际应用中,模糊控制性能的好坏不仅取决于模糊控制规则 的选取恰当与否,也和输入变量量化因子以及输出变量比例因 子的选择关系密切,所以在选取量化因子和比例因子时通常会 考虑以下几个方面:
• 然后根据经验和试凑,由常规整定法确定的PID的初始参数。
变量
e
语言变量
E
基本论域
H1
模糊子集
模糊论域
[-6,6]
量化/比例因子
ec
△Kp
△Ki
EC
△Kp
△Ki
H2
I1
I2
{NB,NM,NS,Z,PS,PM,PB}
[-6,6]
[-6,6]
[-6,6]
△Kd △Kd I3
[-6,6]
由于温度变化过程缓慢,所以选取三角形隶
PS
PM
PB
NB
NB
NB
NM
NM
NS
Z
Z
NM
NB
NB
NM
NS
NS
Z
Z
NS
NB
NM
NM
NS
Z
PS
PS
Z
NM
NM
NS
Z
PS
PM
PM
PS
NM
NS
Z
PS
PS
PM
PB
PM
Z
Z
PS
PS
PM
模糊控制器设计的基本方法

第5章 模糊控制器设计的基本方法5.1 模糊控制器的结构设计结构设计:确定输入、输出变量的个数(几入几出)。
5.2 模糊控制规则设计1. 语言变量词集 {}PB PM PS O NS NM NB ,,,,,,2. 确立模糊集隶属函数(赋值表)3. 建立模糊控制规则,几种基本语句形式: 若A 则B c R A B A E=⨯+⨯ 若A 则B 否则C c R A B A C =⨯+⨯若A 或B 且C或D 则E ()()R A B E C D E =+⨯+⨯⎡⎤⎡⎤⎣⎦⎣⎦ 4. 建立控制规则表5.3 模糊化方法及解模糊化方法模糊化方法1. 将[]b a ,内精确量离散化为[]n n +-,内的模糊量2. 将其区间精确量x 模糊化为一个单点集,即0)(,1)(==x x μμ 模糊推理及非模糊化方法 1. MIN-MAX ——重心法11112222n 00R and R and R and and '?n n n A B C A B C A B C x y c →→→→= 三步曲:取最小 1111'()()()()c A o B o C z x y z μμμμ=∧∧ 取最大 12''''()()()()n c c c c z z z z μμμμ=∨∨∨ 2.最大隶属度法例: 10.30.80.50.5112345C =+-----+++,选3-=*u20.30.80.40.211012345C =+++++,选5.1221=+=*u5.4 论域、量化因子及比例因子选择论域:模糊变量的取值范围 基本论域:精确量的取值范围误差量化因子:e e x n k /= 比例因子:e y k u u /= 误差变化量化因子:c c x m k /=5.5 模糊控制算法的流程m j n i C u B EC A E ij j i ,,2,1;,,2,1 then then if =====其中 i A 、 j B 、ij C 是定义在误差、误差变化和控制量论域X 、Y 、Z 上的模糊集合,则该语句所表示的模糊关系为j i ij j i C B A R ,⨯⨯=mj n i j i C B A R z y x z y x ij j i=====,1,1)()()(),,(μμμμ根据模糊推理合成规则可得:R B A U )(⨯=Yy Xx B A R U y x z y x z ∈∈=)()(),,()(μμμμ设论域{}{}{}l m n z z z Z y y y x x x X ,,,,,,,Y ,,,,212121 ===,则X ,Y ,Z 上的模糊集合分别为一个n ,m 和l 元的模糊向量,而描述控制规则的模糊关系R 为一个m n ⨯行l 列矩阵。
《模糊控制系统》PPT课件
是所期望的。这促使我们研究模糊系统作为万能
函数逼近器并拥有最小系统构成的必要条件,从
而使这些必要条件能用于指导模糊系统开发者设
计更紧凑的模糊控制器和模糊模型
• 必要条件设置了需要的输入模糊集、输出模糊集 和模糊规则,表明了模糊系统需要的输入模糊集
和模糊规则的数目依赖于被逼近函数的极值点的
数目和位置
精选ppt
“Fuzzy Sets”一文,首次提出了模糊集合的概念
• 1974年英国教授Mamdani首次将模糊集合理论应
用于加热器的控制,他将基于规则系统的想法与
模糊参数相结合来构造控制器,模仿人类操作者
的操作经验
• 1985年Takagi和Sugeno提出了另一类具有线性规
则后项的模糊控制器,称之为Takagi-Sugeno
(1988, Japan)
• Postsurgical patients
(1989, USA)
• Auto focus video camera
(1990, Japan)
• Washing machines
(1990, Japan)
• Air conditioners
(1990, Japan)
• Anti-shaking video camera
控制规律
• 各种类型的Mamdani和TS模糊系统在过去几年中
都被证明是万能逼近器,它们能一致逼近定义在
闭定义域D上的任意连续函数到任意高的逼近精
度。这些模糊系统有:加法模糊规则系统、模糊
输入—输出控制器、Sugeno模糊控制器的变型、
非独点模糊逻辑系统、一般Mamdani型模糊系统、
采用线性规则后项的TS型模糊系统、广义模糊系
模糊控制的基本原理和方法
NM
NM
NS
NS
NB
PS
PL
PM
NS
NS
NS
NS
NM
NB
de Z
PL
PM
PS
Z
Z
NS
NM
NB
NS
PL
PM
PS
PS
PS
PS
NM
NB
NM
NM
NB
NB
PL
PL
PL
PM
PM
PM
NM
NB
4. 隐含和推理方法的制定
• 隐含采用 ‘mamdani’方法: ‘max-min‘ • 推理方法, 即 ‘min‘ 方法 • 去模糊方法:面积中心法。 • 选择隶属函数的形式:三角型
c
8
NS ZE NM
g
9
ZE ZE NS
k
10
ZE PB PB
d
11
ZE PM PM
h
12
ZE PS PS
i
13
ZE
ZE
ZE 设置点
关于语言相平面方法调整规则
Ri : if误差e是Ai和误差导数e是Bi ,then控制规则为Ci可以写成: K3[u(k)] F[K1e(k), K2e(k)]
xi 和y的 论域 分别 为U i 和V, 用 模糊 隐含 表 示:
Ri ˆ Aij Ci 或Ri ˆ Ai (xi ) Bi ( y)
j
j
● 模糊控制系统的设计
1. 模糊化的策略 ▲ 采用单点模糊化
▲ 选择合适的模糊函数 ☆ 考虑噪声的概率密度函数。使W f 5 n
yr +
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
则中的前提和结论均是模糊的概念,其中前提为应用领域
中的条件,结论则是这个工人所要采取的控制行动。对于 多输入多输出系统则有多个前提和多个结论,以2输入2输
出的控制系统为例,即是“如果x是A,y是B则z1是C ,z2
是D”的形式。
3、模糊控制中的几个基本运算操作
(1)模糊化运算 (2)句子连接运算
(3)合成运算
数据库
模糊分割的个数决定了最大可能的模糊规则的个数。 如对于两输入单输出的模糊系统,两个输入的模 糊分割数分别为3和7,则最大可能的规则数为 3×7=21。可见模糊分割数越多,控制规则数也 越多,控制规则多对于控制结果的精度固然是好
事,但是要确定这么多的控制规则通是一件非
常困难的事情。
数据库
3)完备性 对于任意的输入,模糊控制器均能给出相应的输出, 这个性质称为完备性。模糊控制的完备性取决于数 据库或规则库。对于数据库方面的要求是:对于任 意的输入,若能找到一个模糊集合,使该输入对于
主要依靠经验和工程背景。
规则库
2)模糊控制规则的建立 模糊控制规则是模糊控制的核心。因此如何
建立模糊控制规则也就成为一个非常关键
的问题。通常情况下我们可以通过以下4种
方法来建立模糊控制规则,且这四种方法
可以相互结合使用的。
规则库
(1)基于专家的经验和控制工程知识 这种方法是通过总结人类专家的经验,并用
数据库
2)输入和输出空间的模糊分割 模糊控制规则中前提的语言变量构成模糊输入空间, 结论的语言变量构成模糊输出空间。每个语言变量
的取值为一组模糊语言的名称,它们构成了语言名
称的集合。每个模糊语言名称相应一个模糊集合。
对于每个语言变量,其取值的模糊集合具有相同的
论域。模糊分割就是要确定对于每个语言变量取值 的模糊语言名称的个数。(板书详细讲解)。
该模糊集合的隶属度函数不小于 ,则称该模糊控
制器满足 完备性。
数据库
4)模糊集合的隶属度函数
(1)数值描述方法
对于论域为离散,且元素个数为有限时,模糊集合
的隶属度函数可以用向量或者表格的形式来表示。
(2)函数描述方法 对于论域为连续的情况,隶属度常常用函数的形式 来描述,最常见的有铃形函数、三角形函数等。
糊化运算中通常可以将隶属度函数取为等
腰三角形或者铃形。
2.3 数据库
数据库是模糊控制器中的知识库的重要组成 部分,它包含了模糊控制规则及模糊数据
处理有关的各种参数,如:尺度变换参数、
模糊空间分割和隶属度函数的选择方式等
等。
数据库
1)输入量变换 对于输入量的尺度变换可以是线性变换的也可以是 非线性变换的,论域可以是连续的也可以是离散 的。如果要求离散的论域,则需要将连续的论域 离散化或者量化。量化可以是均匀的也可以是非 均匀的。(P56,表2.6-2.7)
2)将上述已经处理过的输入量进行尺度变换,使其变换到
各自的论域范围。 3)将已经变换到论域范围的输入量进行模糊处理,使原先 精确的输入量变成模糊量,并用相应的模糊集合来表示。
1、模糊控制器的组成
(2)知识库 知识库中包含了具体应用领域中的知识和要求的控制目标。 它通常由数据库和模糊控制规则库两部分组成。
2.1模糊控制器的基本结构和组成
知识库 参考输入 模糊化 模糊推理 解模糊化 被控对象 输出
1、模糊控制器的组成
模糊控制器主要由4部分组成
(1)模糊化 这部分的作用是将输入的精确量转换成模糊 化量。其中输入量包括外界的参考输入、系统的 输出或状态等。
1、模糊控制器的组成
模糊化的具体过程如下: 1)首先对这些输入量进行处理以变成模糊控制器要求的输 入量。(例子)
所谓尺度变换其实就是将输入量的实际变
化范围映射到要求的论域范围内以满足计
算时的需要(例子)。
模糊化运算
经过尺度变换之后,输入量被限定到了规定 的论域范围内,此时可以将其进行模糊化
运算。模糊化运算一般分为两种情况:
1)单点模糊集合
如果输入量数据是准确的,则通常将其模糊
化为单点模糊集合。
模糊化运算
2)三角形(铃形)模糊集合 如果输入量数据存在随机测量噪声,这时模
(4)清晰化运算
2.2 模糊化运算
模糊化运算是将输入空间的观测量映射为输入论域 上的模糊集合。模糊化在处理不确定信息方面具 有重要的作用。在模糊控制中,观测到的数据常 常是清晰量。由于模糊控制器对数据进行处理是 基于模糊集合的方法。因此对输入数据进行模糊 化是必不可少的一步。
模糊化运算
在进行模糊化运算之前,首先要对输入量进 行尺度变换,使其变换到相应的论域范围。
2.4 规则库
模糊控制规则库是由一系列if-then型的模糊 条件语句所构成,条件语句的前件为输入
量和状态,后件为控制变量。
规则库
1)模糊控制规则的前件和后件变量的选择 模糊控制规则的后件为输出量,大多数情况
下系统的输出都是确定的,如电压、电流
等等。前件变量的选择通常可以是误差,
误差的导数或者积分等等,它们的选择则
来进行的。
1、模糊控制器的组成
(4)清晰化 清晰化的作用是将模糊推理得到的控制量(模糊量)变换为 实际用于控制的清晰量。它包含以下量部分的内容:
1)将模糊的控制量经清晰化变换变成表示在论域范围的清
晰量。 2)将表示在论域范围的清晰量经尺度变换变成实际的控制
量。
2、模糊条件语句和模糊控制规则
模糊控制是一种仿人的控制方式,而通常情况下人在实际生产 过程中的操作经验可以用一组if-then的语言来进行描述(即 “如果出现了xx情况则应该施加xx的控制量),在if-then规
1)数据库主要包括各语言变量的隶属度函数,尺度变换因子
以及模糊空间的分级数等。 2)规则库包括了用模糊语言变量表示的一系列控制规则。
他们反映了控制专家的经验和知识。
1、模糊控制器的组成
(3)模糊推理 模糊推理是模糊控制的核心,它具有模拟人
的基本模糊概念的推理能力。该推理过程
是基于模糊逻辑中的蕴含关系及推理规则
适当的语言来加以描述,最终表示成为模
糊控制规则的形式。
规则库
(2)基于操作人员的实际控制过程 在许多人工控制的工业系统中,很难建立控制对象的模型, 因此用常规的控制方法来对其进行设计和仿真比较困难。
而熟练的操作人员却能成功地控制这样的系统。事实上操
作人员有意或无意地使用了一组if-then的模糊规则来进行 控制,但是他们往往并不能用语言明确地将它们表达出来,