光电编码器原理及应用电路
8线光电编码器电路的原理
8线光电编码器电路的原理
光电编码器是一种将机械运动转换为数字信号输出的传感器。
8线光电编码器电路原理如下:
1.光电传感器:光电编码器利用光电传感器检测反射光信号。
光电传感器通常由一个发光二极管和一个接收光敏二极管组成。
发光二极管发射出红外光,当红外光照射到物体表面时,会被物体反射回来并被接收光敏二极管接收到。
根据接收到的光信号的变化,可以确定物体的运动方向和速度。
2.光电编码盘:光电编码盘是一种具有特定编码结构的透明圆盘。
编码盘上的透光窗口会根据运动方向的不同发出光信号。
光电传感器通过检测光电编码盘上的透光窗口,可以得到不同的光信号。
3.编码器电路:编码器电路负责将光电传感器接收到的光信号转换为数字信号输出。
编码器电路通常以二进制形式输出,即根据不同的光信号,输出不同的二进制编码。
对于8线光电编码器,它可以输出8位二进制编码,即有256种不同的状态。
4.信号处理:得到二进制编码后,可以通过信号处理电路对编码进行进一步处理。
例如,可以将二进制编码转换为脉冲信号,来表示物体的运动方向和速度。
总之,8线光电编码器电路通过光电传感器检测物体的反射光信号,并将其转换
为数字信号输出,可以用来测量和监测物体的运动。
光电编码器的原理及应用

光电编码器的原理及应用光电编码器是一种精密测量设备,常用于测量旋转角度或线性位置。
它通过光电传感器和编码盘之间的互动来实现测量。
本文将介绍光电编码器的原理、构造和应用。
一、原理光电编码器的工作原理基于光电传感器对编码盘上光学标记的检测。
编码盘通常由透明和不透明的区域组成。
当光线照射到编码盘上时,透明和不透明的区域将交替出现在光电传感器面前,从而导致光电传感器输出脉冲。
光电编码器的输出脉冲数与编码盘上的光学标记数目相关。
通常,编码盘上的光学标记数越多,输出脉冲数就越多,从而实现更精确的位置测量。
此外,光电编码器还可通过增量编码或绝对编码方式进行测量。
二、构造光电编码器通常由光学系统、编码盘、信号处理电路和接口电路组成。
光学系统包括光源和光电传感器,用于发射和接收光线。
编码盘作为测量对象,用于生成光学标记。
信号处理电路负责对光电传感器输出的脉冲信号进行处理和解码。
接口电路用于将处理后的信号输出给外部设备。
光电编码器的结构形式主要有旋转式和直线式两种。
旋转式编码器适用于旋转轴测量,常见的有光栅编码器和光学电子编码器。
直线式编码器适用于直线位移测量,常见的有线性光栅编码器和直线电子编码器。
三、应用光电编码器在工业控制、机械加工、自动化系统等领域中有广泛的应用。
1. 位置测量:光电编码器可用于测量机械设备的旋转角度或线性位移,例如机床的进给系统、机器人的关节角度等。
其高精度和稳定性使得测量结果可靠准确。
2. 运动控制:光电编码器可作为反馈装置用于闭环控制系统中,实现对机械设备运动的精确控制。
通过实时监测位置变化,可以对运动过程进行调整和优化,提高生产效率。
3. 位置校准:光电编码器可在传感器灵敏度高、分辨率高的情况下,对其他传感器的测量结果进行校准。
例如,在无人驾驶领域中,光电编码器可用于对雷达或摄像头的测量结果进行校准,提高车辆的定位准确性。
4. 导航系统:光电编码器可用于导航系统中船舶、飞行器等航行过程的航向或航行距离的测量。
光电编码器
光电编码器介绍光电编码器是一种利用光电原理来测量位置和运动的装置。
它通常由光源、光栅、光电二极管和信号解码电路等组成。
光源发射光线经过光栅后被光电二极管检测到,并通过信号解码电路转换为数字信号。
光电编码器广泛应用于机械、自动化控制、仪器仪表等领域。
工作原理光电编码器的工作原理基于光电效应和光栅原理。
当光源照射到光栅上时,栅上的光不同位置的条带通过光栅凹凸不同的位置形成不同的折射或反射光束。
光电二极管接收到这些光束并转换为电信号。
信号解码电路将电信号转换为数字信号,从而实现位置和运动的测量。
主要特点1.高精度测量:光电编码器具有高分辨率的特点,能够实现对位置和运动的精确测量。
2.高速响应:光电编码器的工作速度快,能够实时获取位置和运动的信息。
3.可靠性高:光电编码器使用光学原理进行测量,不受磁场和电磁干扰,具有较高的可靠性。
4.结构简单:光电编码器的结构相对简单,易于制造和维修。
5.高适应性:光电编码器适用于不同的工作环境和工作条件,具有良好的适应性。
应用领域光电编码器广泛应用于各个领域,包括但不限于以下几个方面:1. 机械制造光电编码器可以在机械制造过程中用于测量位置和运动,例如机床、自动化装配线、工业机器人等。
其高精度和高速响应特点能够满足机械制造中对精确测量的需求。
2. 自动化控制光电编码器可以用于自动化控制系统中,例如位置控制、速度控制、角度控制等。
通过对光电编码器测量结果的实时监测和反馈,可以实现对自动化系统的精确控制。
3. 电子设备光电编码器可以应用于电子设备中,例如印刷机、数码相机、光电开关等。
通过光电编码器对位置和运动的测量,可以实现电子设备的精确定位和运动控制。
4. 仪器仪表光电编码器可以应用于仪器仪表中,例如光谱仪、测量仪表、扫描仪等。
通过光电编码器对位置和运动的测量,可以提高仪器仪表的测量精度和稳定性。
发展趋势随着自动化技术的不断发展和应用范围的扩大,光电编码器在工业和科学领域的需求也在不断增加。
光电编码器的原理及应用

光电编码器的原理及应用光电编码器是一种常见的传感器设备,用于将物理运动转换为电信号,通过测量位置、速度和角度等参数来监测和控制运动系统。
本文将介绍光电编码器的工作原理和常见的应用领域。
一、光电编码器的工作原理光电编码器由光电传感器和编码盘组成。
光电传感器通常是由发光二极管(LED)和光敏元件(如光电二极管或光电二极管阵列)组成,放置在编码盘的两侧。
编码盘上有一系列等距分布的透明和不透明区域,当物体运动时,光电编码器监测到编码盘上透明和不透明区域之间的光变化。
当LED发射出光线照射到光电编码器的编码盘上时,光线会穿透透明区域,而被不透明区域所遮挡。
光敏元件接收到光线的强度变化,将其转化为电信号。
通过分析这些电信号,我们可以获取到运动物体的位置、速度以及方向等信息。
二、光电编码器的应用领域1. 机械工业光电编码器在机械工业中广泛应用于运动控制系统,如数控机床、工业机器人和自动化生产线等。
通过使用光电编码器,可以实现对机械设备的高精度位置测量和运动控制,提高生产效率和产品质量。
2. 医疗设备在医疗器械领域,光电编码器可用于精确测量和控制医疗设备的运动,如手术机械臂、X射线机和CT扫描等。
通过光电编码器的应用,可以确保医疗设备的准确性和安全性,提高医疗诊断和治疗的效果。
3. 汽车工业光电编码器在汽车工业中被广泛用于车辆的电子稳定控制、传动系统和方向盘位置检测等方面。
通过对车辆各部件的精确测量和控制,可以提高行驶安全性和驾驶舒适度。
4. 电子设备光电编码器也被应用于电子设备中,如光学鼠标、打印机和数码相机等。
光电编码器可以测量光标在表面上的位置,通过对光标位置的检测,可以实现精确的光学定位和跟踪功能。
三、总结光电编码器是一种常见的传感器设备,通过将物理运动转换为电信号,实现对运动系统的监测和控制。
光电编码器的工作原理是利用光敏元件对光线的强度变化进行测量和转换。
光电编码器在机械工业、医疗设备、汽车工业和电子设备等领域有着广泛的应用,可以提高产品的精确性、性能和安全性。
光电编码器原理及应用

光电编码器原理及应用光电编码器是一种将机械运动转换为数字信号的装置。
它由光源、光栅、光电传感器和信号处理电路组成。
光源发出光线经过光栅产生不均匀间隔的光斑;光电传感器感受到光栅反射的光斑,并转换为光电信号;信号处理电路则将光电信号转换为数字信号输出。
光电编码器的工作原理是通过测量光栅上光斑的移动来计算机械运动的位移。
当机械部件运动时,光斑也会相应地移动。
光电传感器感知到不同位置的光斑,并产生相应的光电信号。
信号处理电路会将光电信号转换为数字信号,以便计算机进行处理和分析。
根据光电编码器的设计,可以实现高精度的位置测量,而且由于采用了光电传感器,不会受到摩擦和磨损的影响,提高了测量的精度和可靠性。
1.位置测量:光电编码器可以精确测量机械部件的位置,并将位置信息反馈给控制系统。
例如,在工业机械中,可以使用光电编码器测量转动轴的角度或线性导轨的位置。
这可以实现精确的定位和控制。
2.运动控制:光电编码器可以用于测量机械部件的速度和加速度,并实现闭环控制。
通过实时监测位置、速度和加速度等参数,控制系统可以对运动进行精确的调整和控制,以满足特定的运动要求。
3.位置反馈:光电编码器可以用作位置反馈装置,使控制系统能够知道机械部件的准确位置。
通过与期望位置进行比较,控制系统可以及时调整和纠正位置偏差。
4.角度测量:光电编码器可以用于测量旋转轴的角度。
在机械加工、自动化控制和机器人等领域,光电编码器广泛应用于角度测量和定位。
5.自动校正:光电编码器还可以用于自动校正机械设备的位置或角度。
通过比较期望值和测量值,控制系统可以自动调整和校正机械设备,以保持其准确性和稳定性。
总之,光电编码器是一种重要的测量和控制装置,广泛应用于各种机械设备和工业自动化系统中。
它能够提供精确的位置测量和运动控制,为机械运动的精确性、稳定性和可靠性提供了重要支持。
随着科技的发展和创新,光电编码器的应用领域将会更加广阔,有望实现更高的测量精度和控制效果。
光电编码器的工作原理和应用电路
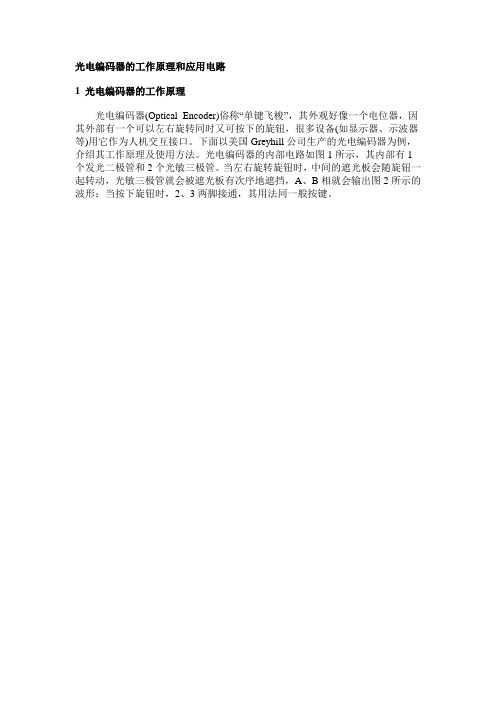
光电编码器的工作原理和应用电路1 光电编码器的工作原理光电编码器(Optical Encoder)俗称“单键飞梭”,其外观好像一个电位器,因其外部有一个可以左右旋转同时又可按下的旋钮,很多设备(如显示器、示波器等)用它作为人机交互接口。
下面以美国Greyhill公司生产的光电编码器为例,介绍其工作原理及使用方法。
光电编码器的内部电路如图1所示,其内部有1个发光二极管和2个光敏三极管。
当左右旋转旋钮时,中间的遮光板会随旋钮一起转动,光敏三极管就会被遮光板有次序地遮挡,A、B相就会输出图2所示的波形;当按下旋钮时,2、3两脚接通,其用法同一般按键。
当顺时针旋转时,光电编码器的A相相位会比B相超前半个周期;反之,A相会比B相滞后半个周期。
通过检测A、B两相的相位就可以判断旋钮是顺时针还是逆时针旋转,通过记录A或B相变化的次数,就可以得出旋钮旋转的次数,通过检测2、3脚是否接通就可以判断旋钮是否按下。
其具体的鉴相规则如下:1.A为上升沿,B=0时,旋钮右旋;2.B为上升沿,A=l时,旋钮右旋;3.A为下降沿,B=1时,旋钮右旋;4.B为下降沿,A=O时,旋钮右旋;5.B为上升沿,A=0时,旋钮左旋;6.A为上升沿,B=1时,旋钮左旋;7.B为下降沿,A=l时,旋钮左旋;8.A为下降沿,B=0时,旋钮左旋。
通过上述方法,可以很简单地判断旋钮的旋转方向。
在判断时添加适当的延时程序,以消除抖动干扰。
2 WinCE提供的驱动模型WinCE操作系统支持两种类型的驱动程序。
一种为本地驱动程序,是把设备驱动程序作为独立的任务实现的,直接在顶层任务中实现硬件操作,因此都有明确和专一的目的。
本地设备驱动程序适合于那些集成到Windows CE平台的设备,诸如键盘、触摸屏、音频等设备。
另一种是具有定制接口的流接口驱动程序。
它是一般类型的设备驱动程序。
流接口驱动程序的形式为用户一级的动态链接库(DLL)文件,用来实现一组固定的函数称为“流接口函数”,这些流接口函数使得应用程序可以通过文件系统访问这些驱动程序。
光电编码器原理及应用电路
光电编码器原理及应用电路1•光电编码器原理光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。
这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。
光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。
由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理示意图如图1所示;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。
此外,为判断旋转方向,码盘还可提供相位相差90度的脉冲信号。
图1光电第码器原理示意图根据检测原理,编码器可分为光学式、磁式、感应式和电容式。
根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。
1. 1增量式编码器增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90度的脉冲信号,Z相为每转一个脉冲,用于基准点定位。
它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。
其缺点是无法输出轴转动的绝对位置信息。
1. 2绝对式编码器绝对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有若干同心码道,每条道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数, 在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。
这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。
显然,码道越多,分辨率就越高,对于一个具有N位二进制分辨率的编码器,其码盘必须有N条码道。
目前国内已有16位的绝对编码器产品。
绝对式编码器是利用自然二进制或循环二进制(葛莱码)方式进行光电转换的。
绝对式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,绝对编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。
光电编码器的工作原理
光电编码器的工作原理
光电编码器是一种常用于测量和检测物理运动和位置的装置。
其工作原理基于光电效应和编码技术。
1. 光电效应
光电效应是指当光照射到特定的物质表面时,光子的能量会转化为电子的能量,从而引起电流的流动。
光电编码器利用光电效应产生光信号和电信号之间的转换。
2. 光电编码技术
光电编码器使用光栅或光轮作为编码器的核心部件。
光栅是由透明和不透明线条交替排列而成的圆盘,而光轮是由周期性的透明和不透明窗口组成的。
当光栅或光轮转动时,它们会产生不同的光信号,这些光信号会被光电元件(如光电二极管或光敏电阻)接收并转换为电信号。
3. 工作原理
在光电编码器中,光栅或光轮的旋转会导致光信号的变化。
光电元件接收到光信号后,会将其转换为电信号。
根据光信号的变化,可以确定光栅或光轮的位置和运动方向。
光电编码器通常包含两个或多个光电传感器,它们安装在固定位置,并与光栅或光轮对应。
通过比较不同光电传感器接收到的光信号,可以确定光栅或光轮的位置和方向。
4. 应用
光电编码器广泛应用于自动化系统中,用于测量和控制位置、速度和角度。
它们被用于各种设备和机械系统,如机械车床、印刷机、机器人、电梯等。
通过测量光栅或光轮的位置变化,可以实现精确的位置控制和运动检测。
光电编码器原理与应用
光电编码器原理与应用光电编码器是一种利用光电传感器和编码盘进行位置或运动监测的装置。
它通过将光线的变化转换成电信号,并将信号解码成数字信号,从而实现对物体位置或运动的准确测量。
光电编码器的工作原理和应用非常广泛,下面将详细介绍。
光电编码器主要由光源、光电传感器和编码盘组成。
编码盘通常由两个内外同心的圆盘构成,内圆盘固定不动,而外圆盘与待测物体相连,随着物体的运动而旋转。
编码盘上覆盖有一系列等距分布的透明和不透明条纹。
当光线照射在编码盘上时,透明的条纹会让光线透过,不透明的条纹会阻挡光线。
在光电传感器上有一个接收元件,例如光敏二极管或光电晶体管,它将光线转换成电信号。
当透明条纹经过光电传感器时,光线能够通过并照射到光敏元件上,产生一个较大的电信号。
而当不透明条纹经过光电传感器时,光线被阻挡,导致光敏元件上的电信号较小。
通过测量光线的变化,可以确定编码盘的位置或运动。
1.机械工业:光电编码器广泛应用于数控机床、印刷机械和纺织机械等高精度设备中。
通过测量机床或工件的位置或运动,可以实现对加工过程的精确控制。
2.电子设备:光电编码器在电子设备中用于控制旋转按钮、位置传感器等。
例如,音响设备中的音量按钮和调频按钮就是通过光电编码器来检测位置和运动。
3.汽车工业:光电编码器在汽车发动机中应用广泛,用于测量曲轴的位置和转速。
这对发动机的正常工作和故障诊断非常重要。
4.机器人技术:光电编码器在机器人技术中用于测量机器人的关节位置和运动,从而实现对机器人的精确控制和定位。
5.医疗设备:光电编码器在医疗设备中的应用也相当广泛,例如用于CT扫描仪、X射线机和手术机器人等设备中。
光电编码器以其高精度、高稳定性和可靠性成为许多行业中不可或缺的装置。
它可以实时监测位置和运动,提供准确的数据,帮助实现自动化控制和定位。
随着科技的不断进步,光电编码器的应用将会越来越广泛,成为现代工业和科技发展的重要组成部分。
光电编码器介绍1光电编码器原理光电编码器是一种通过光电转换将
光电编码器介绍1光电编码器原理光电编码器是一种通过光电转换将信号转换成电信号的装置。
光电编码器由光源、光电传感器和信号处理电路组成。
光电编码器原理是利用光电传感器中的光敏电阻或光敏二极管,将光信号转换成电信号。
光源会发出光束,通过光栅或编码盘进行光的调制。
当光束经过光栅或编码盘时,会发生光的散射或反射,光电传感器接收到光束后,光敏电阻或光敏二极管会产生相应的电信号。
这个电信号经过信号处理电路处理后,可以得到对应的编码信号。
2光电编码器应用领域在机械控制系统中,光电编码器可以用于测量机器人、电机、传动装置等的位置和速度。
它可以提供高精度和稳定的信号输出,帮助机械系统实现精确的控制。
在自动化设备中,光电编码器可以用于测量运动轨迹和速度,实现位置控制和速度控制。
它可以提供准确的反馈信号,保证设备的稳定运行。
在仪器仪表中,光电编码器可以用于测量仪器的转动角度和速度。
它可以提供高分辨率和精确的角度测量结果,满足科学实验和工程测量的需求。
3光电编码器的优势高精度:光电编码器可以提供高分辨率和精确的位置和速度测量结果,满足高精度控制需求。
稳定性好:光电编码器采用光电转换原理,不受电磁干扰和磁场影响,具有较好的稳定性和可靠性。
工作速度快:光电编码器可以实现高速测量,适用于高速运动控制系统。
容易安装:光电编码器体积小、重量轻,结构简单,可以方便地安装在各种设备上。
维护成本低:光电编码器具有较长的寿命,不需要频繁维护和更换,降低了维护成本。
总结:光电编码器是一种广泛应用于位置和速度测量的装置。
它采用光电转换原理,能够将光信号转换成电信号,并提供高精度和稳定的测量结果。
光电编码器具有高精度、稳定性好、工作速度快、容易安装和维护成本低等优点,在机械控制系统、自动化设备和仪器仪表等领域得到广泛应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
光电编码器原理及应用电路1、光电编码器原理光电编码譌就星一种通过光电转换将输出轴上得机械几何位移量转换成脉冲或数字■得传感器•这就蹇目 前应用最多得传感器,光电编码器就是由光栅盘与光电检测装迓组成•光栅盘就是在一走臺径得®板上等 分地开通若干个长方形孔.由于光电码盘与电动机同轴,电动机旋转时「光栅盘与电动机同速旋车专,经发光二 极■等电子元件组成得检测装迓检测输出若干脉冲信号,其原理示总S 如ffi 1所示;通过计算每秒光电编码 器输出脉冲得个数就能反映当前电动机得转速.此外为判断旋转方向,码盘还可提供相位相差90度得脉 冲碍图1光电编码S 原理示S 图ffi 1光电缩码»原理示意® 根垢检测原理编码器可分为光学貳、磁式、感应式与电容式・根揣其刻度方法及信号输出形式,可分为增量 式、绝对式以及混合式三种.1、1增量式编码器« ■式编码器就是妣利用光电转换原理输出三组方波脉冲A 、B 与Z 相;A 、B 两组脉冲相位差90度得 脉冲信号忆相为每转一个脉冲,用于墓准点走位.它得优点就是原理构适简单,机械平均寿命可在几万小时 以上抗干扰能力强「可靠性画适合于长距离传输・其缺点就麻法输出轴转动得绝对位琶信息•1、2绝対式编码器绝对竊码器就是厦接输出数字■得传感器,在它得圆形码盘上沿径向有若干同心码匾每条通上由透光与不 透光得扇形区相间组成,相邻码iS 得扇区数目就墨双倍关嬴码盘上得码通数就就墨它得二进制数码得位埶 在码盘得一侧就是光鴻另TW 对应每Fis 有Tess 元件;当码盘处于不同位迓时各光敏元件根据受光照 与否转换岀相应得电平信号■形成二进制数・这种扁码器得持原就超不耍计数器,在转轴得任倉位迓都可读 岀一个a 走得与位迓相対应得数字码•显然「码通越多■分辨率就越画对于一个典有N 位二进制分辨率得竊 码器,其码盘必须有N 条码通・目前国内已有16位得绝对编码»产品•绝对式竊码器就是利用目然二进制或循环二逬制(葛莱码)方式进行光电转换^專・绝对式编码器与1»量式编 码器不同之处在于圆盘上透光.不透光得线条a 形,绝对編码器可有若干编码,根JB 读出码盘上得編码,检测 绝对位编码得设计可采用二iS 制码.循环码•二进制补码等•它得特原就是:1、2、1可以車接读出角度坐标得绝対值;1、2、2没有累积题1、2、3电源切除后位迓信息不会丢失.但就垂分辨率就是由二进制得位数来决走得,也就就墨说精度取决 于位K 启前育10位、14位等多种・1、3混合式绝对值媾码S混合式绝対值编码器,它输出两组信息:一组信息用于检测磁极位迓滞有绝对信息功能;另一组则完全同堆量JUUI丸溝迓饿©盘 先敏元作转轴式漏码器得输岀信息.光电编码器就迅一种角度(角速度)检测装迓^它将输入给轴得角度靈利用光电转换原理转换成相应得电脉 冲或数字■,興有体积小「精度衙,:n 乍可靠,接□数字化等优原・它广泛应用于数控机床.回转台、伺服传动、 机器人•胃达、军事目标测走等需要检测角度得装畳与设备中•2、光电编码器得应用电路2、1EPC. 755A 光电编码器得应用EPC ■ 755A 光电编码器興备ft 好彳雾使用性能,在角度测量、位移测■时抗干扰能力很弭井典材穂走可靠得 输出脉;中信号且该脉;中信号经计数后可得到被测量得数字信号.因此我们在研制汽车麗驶樓拟器时,対方 向盘旋转角度得测■选用EPC - 755A 光电编码器作为传恋器,其输出电路选用集电极开路聖输出分辨率选 用360个脉冲/圈考虑到汽车方向盘转动就罡双向得,既可顺时针旋$0也可逆时针旋辑需要对镰码器得输 岀信号鉴相后才能计数・S 2给出了光电網码》实际使用得鉴相与双向计数电路,鉴相电路用1个D 触发 器与2个与非门组成计数电路用3片74LS193组成•74151si当光电编码器顺时针旋转时,通運A 输岀波形超前通道B 输出波形90^D 赃发器输出Q (波形W1)为衙电 平Q (波形W2)为低电平上面与非门打开■计数 脉冲通过(波形W 为送至双向计数器74LS193得加脉冲输 入端CU.进行加法计数;此时下面与非门关闭,其输岀为商电平(波形W4).当光电竊码器逆时针旋转时通 )1 A 输出波形比通il B 输岀波形延迟90^D 赃发器输出Q (波形W1)为低电平,Q (波形W2)为蔺电平,上面 与非门关闭(翼输出为离电平(波形W3);此时下面与非门打开,计数脉冲通过(波形W4),送至双向计数器 74LS193得减脉冲输入揣CD,进行减法计数•汽车方向盘顺时针与逆时针旋转时,翼最大旋转角度均为两H 半■选用分辨率为360个脉冲/B 得網码譌M 最OUT-L OVT-B OVT-A JI t2 PO Pl tz P3 CUCD CL MR QOQIQ2Q3 TCV TCD 顺时针瞬逆时針删oirr-AOUT-BVI*2V3V4大输出脉冲数为900个;实际使用得计数电路用3片74LS193组成在系统上电初始化时洗对集进行复位(CLR信号h再将翼初值设为800H,即2048(10信号);如此,当方向盘顺时针旋转时,计数电路得输出范00 为2048〜2948,当方向盘逆时针旋转时计数电路得输出范围为2048〜1148;计数电路得数垢输出DO〜D11摩换处理电路.实际使用时.方向盘频繁地进行顺时针与逆时针转动,由于存在量化舷工作较长一段时间后方向盘回中时计数电路输出可能不就是204&而就是有几个字得偏差;为解决这一问观我们增加了一个方向盘回中检测电路,系统工作后,数碗理电路在欖拟器处于非操作状态时,系统检测回中检测电路,若方向盘处于回中状态両计数电路得数据输出不就是204&可対计数电路进行复位疋新设迓初值.2、2光电编码器在更力测量仪中得应用采用旋转式光电编码器,把它得转轴与■力测量仪中补偿旋钮轴相连・靂力测量仪中补悽旋tfl得角位移量转化为某种电信号量旋转式光电缩码器分两种,绝对编码器与墙量编码器.« ■编码SS就是以脉冲形式输出彳辱传感器,其码盘比绝对編码器码盘要简单得多且分辨率屋衙• 一般只需要三条码a这里得码連实际上已不典有绝対勰器码il得意义•而就是产生计数脉冲.它得码盘得^卜連与中间通有数目相同均匀分布得透光与不透光得扇形区(光棚“旦就是两通扇区相互错幵半个区•当码盘转动时芯得输出信号就遷相位差为90°得A相与B相脉冲借号以及只有一条透光狭缝得第三码通所产生得脉冲信号(它作为码盘得墓准匹给计数系统提供一个初始得零位信号)•从代B两个输出信号得相位关系(超前或^^后)可判断旋转得方向・由图3(3)可见,当码盘正转时,A iS脉冲波形比B連超前n/2,而反转时人il脉冲比B a滞后n/2. S 3(b)就是一实际电路,用A iKS形波彳專下沿J»发单穂态产生彳專正脉冲与B il整形波相■与;当码盘正转时只有正向口脉冲输出「反之只有逆向口脉冲输出・因此,增■網码»就是根垢输出脉冲源与脉冲计数来确走码盘得转动方向与相对角位移量.通當,若编码器育N个(码連)输岀信号■翼相位差为n/ N,可计数脉冲为2N倍光栅釵现在N=2.圏3电路得鉄点就是育时会产生淚记脉冲适成淚塑这种1•况出现在当某一運信号处于雋'或■低・电平状态両另一通信号正处于离■与低'之间得往返变化状态’此时码盘虽然未产生位移•但就是会产生单方向得输出脉冲.例如「码盘发生掛动或手动対准位迓时(下面可以瞧到,在更力仪测■时就会有这种情况)•顾T_n_m-mj~L_rL_r mwinnrrmf 正向脈冲逆向冲mwranrrnT 74LS14Ail 道」-计'74IS14碇道二一讣;(b)图3增量光电编码《基本液形和电路逹方修Y —>正方向nwmmnnr 逆向隸沖iwranm(£(b)S 4四倍计数方式的波形和电路S 4就是一个既能防止淚脉冲又删衙分辨率得四(豳细分电路・在这里採用了有记忆功能得D 型触发 器与时忡发生电路•由a 4可见,每一通育两个D 解发器串接,这样,在时钟脉冲得间隔中■两个Q 端(如对应 B74151751^^2.7两个如期得输入状态鬲两者相同,则表示时钟间隔中无变化;杏则『 可以根JB 两者关系判断岀它得变化方向『从而产生‘正向或反向'输出脉冲•当某運由于振动在橋;•低•间往 复变化时将交■产生'正向■与反向'脉冲,这在对两个计数SS 取代数与时就可消除它们得影响仟面仪器得 读数也将涉及这原).由此可见时钟发生器得频率应大于振动频率得可能最大僮.由a 4还可W 也在原一 个脉冲信号得朋内■得到了四个计数脉冲•例如,原每圈脉冲数为1000得镰码器可产生4倍频得脉冲数就 S 4000个■翼分辨率为0、09\实际上目前这类传感器产品畤光數元件输出信号得放大整形等电路与 传感检测元件封装在一fi •所以只宴力0±细分与计数电路就可以组成一个角位移测楚系统(74159就是 4・:L6译码»)•翼她资料: 編码器如以信号原理来分/»增量型網码》,绝対型镰码器.增亚编码器(旋转型)他道XTLT^f rLrmj WfiiS正向脉冲工作飓由一个中<>有轴得光电码盘,其上育环形通、as得刻线•育光电发射与接收器件读取,获得四组正弦波信号纟且合成A、B、G D每个正弦波相差90度扌目位差(相对于—Nfl波为360度)■将C、D信号反向总加在A、B两相上,可增强穂走信号;另每转输出一个Z相脉冲以代表零位拳考位•由于A. B两相相差90度「可通过t匕较A相在前还就是B相在前「以判别編码器得正转与反转■通过零位脉沖, 可获得编码81得零位対位.編码器码盘得材料有玻璃、金厲、22料•玻璃码盘就是在玻踽上沉积很薄得刻线「翼热稳定性好,精度詣,金属码4接以通与不通刻线•不易碎,但由于金厲育 F 得厚慮精度就育限制,其热稳走性就要比玻璃得差一个数■级塑料码盘就軽济型得,其成本低,但精度、礙定性.寿命均要差一些.分辨率TR码器以每旋转360度提供多少得通或暗刻线称为分辨率,鲫解析分度.或购称多少线■一般在瞬专分度5~ 10000线・信号输出: 信号输出育正弦波(电流或电压)方波(TTL、HTL)■集电极开路(PNP. NPN),推拉式多种形式,翼中TTL为长线差分驱动(对称AA・;B,B・;ZZ・),HTL也称推拉式.推挽式输岀,編码器得信号接收设备接□应与镰码器对应・信号逵接T码器4尊脉冲信号F连接嵌81、PLC、计算机PLC与计算机连接得權块育/朗屋權块与商速權块之分幵关频率有低有码如单相联接用于单方向计数,单方向测速•A. B两相联接,用于正反向计数.判断正反向与测速•A. B、Z三相联接,用于带掺考位修正得位量测杜A. A・R B・Z Z•连接,由于带育对称负信号得连接,电流对于电缆贡献得电磁场为0,衰减最小,抗干扰銀隹可传输较远得距臥対于TTL得芾材对称负信号输出得竊码器,信号耐距禹可达150米・対于HTL得带育对称负信号输出得编码器,信号传输距离可达300米.增壘式骗码制尊问题:1»量型竊码器存在零点累计课墓抗干扰较差,接收设备得停机需断电记忆,开机应找零或势考位等问题,这些问题如选用绝对型编码器可以解决.1»量型编码器得F应用:测遶测转动方向,测移动角度.距离(相对)• 绝对型编码器(旋转型)绝对漪码器光码盘上育许多通光通通刻线,每通刻线依次以2线、4线• 8线、16线……编排,这样,在编码器得每一个位迓■通过渎取每通刻线得通、晴,获得一缜从2得零次方到2彳專n-1次方得唯一彳專2进制綢码(格■码)■这就称为n位绝对編码器•这样得编码SS就是由光电码盘彳硕械位迓决走得•它不受停电、干掀專影响・绝对编码器由机械位迓决走得每个位迓就是唯一得,它无需记忆,无耀找參考点,而且不用一直计数,什么时候需要知iliaa 什么时候就去读取它彳>{2«・这样旅码器砾干扰傩数揭得可靠廿:*:}M了.。