对向量求导
matlab中diff函数求导的的用法

Matlab中的diff函数是用来求解导数的一个方便而强大的工具。
它可以对向量或矩阵进行导数运算,以便在数学建模和数据分析中进行快速准确的计算。
本文将对Matlab中diff函数的用法进行详细介绍,帮助读者更好地理解和应用这一功能。
一、基本用法1. 对向量求导在Matlab中使用diff函数对向量进行求导,可以直接调用该函数并输入要求导的向量作为参数即可。
例如:```matlabx = linspace(0, 2*pi, 100); 生成一个0到2π的100个点的向量y = sin(x); 计算sin(x)的值dydx = diff(y) ./ diff(x); 对y进行求导```上述代码中,我们首先使用linspace函数生成了一个包含100个点的等间距向量x,然后根据x计算了对应的sin(x)值作为向量y。
我们使用diff函数对向量y进行求导,得到了dydx。
2. 对矩阵求导除了对向量进行求导,diff函数也能够处理矩阵。
在对矩阵进行求导时,需要指定求导的维度,即对行进行求导还是对列进行求导。
例如:```matlabA = [1 2 3; 4 5 6; 7 8 9]; 定义一个3x3的矩阵dAdx = diff(A, 1, 2); 对A的行进行求导dAdy = diff(A, 1, 1); 对A的列进行求导```在上述代码中,我们定义了一个3x3的矩阵A,并分别对其行和列进行了求导运算。
二、高阶导数的计算除了一阶导数外,diff函数还可以用来计算高阶导数。
通过多次调用diff函数,可以得到任意阶的导数。
例如:```matlabx = linspace(0, 2*pi, 100); 生成一个0到2π的100个点的向量y = sin(x); 计算sin(x)的值d2ydx2 = diff(y, 2) ./ diff(x, 2); 对y进行二阶导数运算```在上述代码中,我们通过两次调用diff函数,分别对向量y和x进行了二阶导数的计算,得到了d2ydx2。
简单的求导公式大全

简单的求导公式大全当涉及到求导公式时,需要考虑一元函数和多元函数的情况。
下面是一些常见的求导公式:一元函数的求导公式:1. 常数函数的导数为0,(c)' = 0,其中c为常数。
2. 幂函数的导数,(x^n)' = nx^(n-1),其中n为常数。
3. 指数函数的导数,(e^x)' = e^x。
4. 对数函数的导数,(ln(x))' = 1/x。
5. 三角函数的导数:正弦函数的导数,(sin(x))' = cos(x)。
余弦函数的导数,(cos(x))' = -sin(x)。
正切函数的导数,(tan(x))' = sec^2(x)。
6. 反三角函数的导数:反正弦函数的导数,(arcsin(x))' = 1/√(1-x^2)。
反余弦函数的导数,(arccos(x))' = -1/√(1-x^2)。
反正切函数的导数,(arctan(x))' = 1/(1+x^2)。
多元函数的求导公式:1. 偏导数,对于多元函数f(x1, x2, ..., xn),其关于变量xi的偏导数表示为∂f/∂xi。
2. 多元函数的链式法则,若z=f(g(x)),则dz/dx = (df/dg) (dg/dx)。
3. 多元函数的梯度,对于向量值函数f(x1, x2, ..., xn),其梯度表示为∇f = (∂f/∂x1, ∂f/∂x2, ..., ∂f/∂xn)。
以上只是一些常见的求导公式,实际上还有更复杂的函数和求导规则,如乘积法则、商规则、复合函数求导等。
在具体问题中,可以根据需要使用不同的求导公式来求解。
向量微积分理解向量微积分的概念与计算方法

向量微积分理解向量微积分的概念与计算方法向量微积分是微积分学中的重要分支,是研究向量函数导数、积分、微分方程和曲线、曲面的基础工具。
本文将从向量微积分的概念入手,逐步介绍向量微积分的计算方法。
一、向量微积分的概念向量是具有大小和方向的量,常用箭头表示。
向量微积分则是对向量进行微积分运算的过程,包括求导、求积分等。
在向量微积分中,我们经常用到矢量的点乘和叉乘。
矢量的点乘表示为“·”,计算方法为将两个矢量对应分量相乘后求和。
矢量的叉乘表示为“×”,计算方法为用行列式的形式计算。
利用矢量的点乘,我们可以计算出向量的模长,两个向量的夹角以及向量的投影。
利用矢量的叉乘,我们可以计算出两个向量的乘积向量及其模长。
二、向量的导数在向量微积分中,我们常常需要对向量函数进行求导。
向量函数的导数表示为关于自变量的导数矢量,即函数值在各个自变量分量上的导数。
向量函数的导数计算方法与标量函数的导数类似,只需要对每个分量分别求导即可。
求导的规则包括基本的四则运算法则以及链式法则等。
通过求导,我们可以获得向量函数的切向量,从而研究曲线的切线方向以及曲面的法线方向。
三、向量的积分向量函数的积分表示为函数的定积分对应的矢量。
向量函数的积分可以用于计算曲线以及曲面的面积、体积等物理量。
与求导相反,求积分需要对向量函数的每个分量进行积分。
求积分的规则包括基本的定积分法则以及换元法等。
通过积分,我们可以得到曲线的弧长、曲面的面积以及体积等重要信息。
四、向量微分方程向量微分方程是包含矢量未知函数及其导数的微分方程。
求解向量微分方程的方法主要包括变量分离法、常数变易法、矢量积分因子法等。
通过求解向量微分方程,我们可以得到矢量未知函数的解析表达式,从而研究物理现象以及工程问题。
综上所述,向量微积分是研究向量函数导数、积分、微分方程以及曲线、曲面的基础工具。
通过了解向量微积分的概念和计算方法,我们可以更好地理解和应用微积分学中的向量运算。
矩阵对向量求导
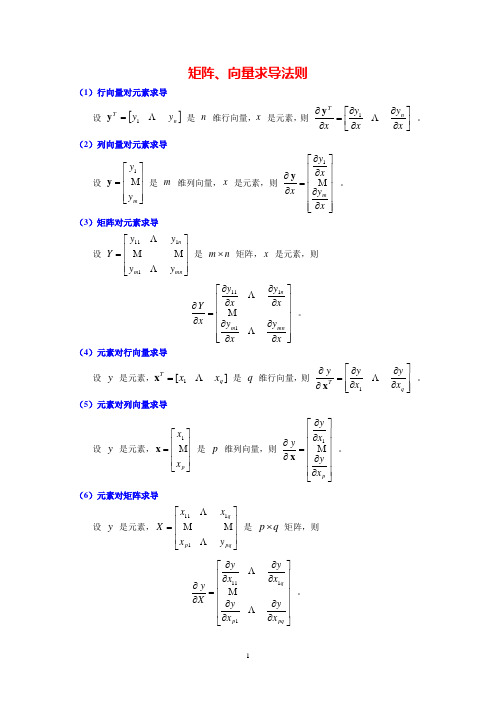
矩阵、向量求导法则(1)行向量对元素求导设 []n Ty y 1=y 是 n 维行向量,x 是元素,则⎥⎦⎤⎢⎣⎡∂∂∂∂=∂∂x y xy x n T1y 。
(2)列向量对元素求导设 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=m y y 1y 是 m 维列向量,x 是元素,则 ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡∂∂∂∂=∂∂x y x y x m 1y 。
(3)矩阵对元素求导设 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=mn m n y y y y Y1111 是 n m ⨯ 矩阵,x 是元素,则 ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡∂∂∂∂∂∂∂∂=∂∂x y xyx y xy x Y mn m n1111。
(4)元素对行向量求导 设 y 是元素,][1q Tx x =x 是 q 维行向量,则⎥⎥⎦⎤⎢⎢⎣⎡∂∂∂∂=∂∂q T x y x yy 1x 。
(5)元素对列向量求导设 y 是元素,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=p x x 1x 是 p 维列向量,则 ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡∂∂∂∂=∂∂p x y x y y 1x。
(6)元素对矩阵求导设 y 是元素,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=pq p q y x x x X 1111 是 q p ⨯ 矩阵,则⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡∂∂∂∂∂∂∂∂=∂∂pq p q x y x yx y x yX y1111。
(7)行向量对列向量求导设 []n Ty y 1=y 是 n 维行向量,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=p x x 1x 是 p 维列向量,则⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡∂∂∂∂∂∂∂∂=∂∂p n pn Tx y x yx y x y1111x y。
(8)列向量对行向量求导设 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=m y y 1y 是 m 维列向量,][1q Tx x =x 是 q 维行向量,则⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡∂∂∂∂∂∂∂∂=∂∂q m mq Tx y x y x y x y1111x y 。
(9)行向量对行向量求导设 []n Ty y 1=y 是 n 维行向量,][1q T x x =x 是 q 维行向量,则⎥⎥⎦⎤⎢⎢⎣⎡∂∂∂∂=∂∂qTTTT x x y y x y1 。
二次型对列向量求导

二次型对列向量求导
英文回答:
The derivative of a quadratic form with respect to a column vector is a linear transformation. It is given by the following formula:
∇[x^T A x] = 2Ax.
where:
x is a column vector.
A is a symmetric matrix.
The gradient of a quadratic form is a vector that points in the direction of the steepest ascent of the form. It can be used to find the maximum or minimum of a quadratic form.
中文回答:
二次型的对列向量求导。
二次型对列向量的导数是一个线性变换。
其公式如下:
∇[x^T A x] = 2Ax.
其中:
x 是列向量。
A 是对称矩阵。
二次型的梯度是一个指向该形式最陡上升方向的向量。
它可以用来求二次型的最大值或最小值。
求导过程:
设二次型为:
Q(x) = x^T A x.
则其对列向量 x 的偏导数为:
∂Q/∂x_i = 2A_ix.
其中:
A_i 是矩阵 A 的第 i 列。
将所有偏导数按列组成雅可比矩阵,得到:
∇Q(x) = [∂Q/∂x_1, ∂Q/∂x_2, ..., ∂Q/∂x_n] = 2Ax.
因此,二次型对列向量的导数为 2Ax。
导数与函数的向量值函数求导

导数与函数的向量值函数求导导数是微积分中的重要概念,用于描述函数在某一点上的变化率。
而函数的向量值函数则是指函数的输出为向量的情况。
在本文中,我们将探讨导数与函数的向量值函数求导的相关内容。
一、导数的定义导数表示函数在某一点处的变化率,通常记为 f'(x),可以通过极限的方法来定义。
对于实数域上的函数 f(x),其在 x 点处的导数定义如下:f'(x) = lim┬(h→0)〖(f(x+h)-f(x))/h〗二、向量值函数的概念向量值函数是指函数的输出是一个向量。
一般形式为 F(t) = (f₁(t),f₂(t), ..., fₙ(t)),其中 f₁(t)、f₂(t)、...、fₙ(t) 分别是关于 t 的实值函数。
向量值函数可以表示多维空间中的曲线、曲面等几何对象。
三、向量值函数的导数对于向量值函数 F(t) = (f₁(t), f₂(t), ..., fₙ(t)),其导数 F'(t) = (f'₁(t),f'₂(t), ..., f'ₙ(t)) 是一个向量,其中 f'₁(t)、f'₂(t)、...、f'ₙ(t) 分别是f₁(t)、f₂(t)、...、fₙ(t) 的导数。
四、向量值函数的求导方法向量值函数的求导方法与一般函数的求导方法类似,对每个分量分别求导。
例如,对于二维向量值函数 F(t) = (x(t), y(t)),其导数 F'(t) =(x'(t), y'(t)),其中 x'(t)、y'(t) 分别是 x(t)、y(t) 的导数。
五、基本导数规则以下是常用的向量值函数导数规则:1. 常数规则:若 c 是一个常数,则 (cF(t))' = cF'(t)2. 和差规则:若 F(t) 和 G(t) 是两个向量值函数,则 (F(t) ± G(t))' = F'(t) ± G'(t)3. 数乘规则:若 F(t) 是一个向量值函数,c 是一个常数,则 (cF(t))' = cF'(t)4. 函数乘法规则:若 F(t) 和 G(t) 是两个向量值函数,则 (F(t)·G(t))' = F'(t)·G(t) + F(t)·G'(t)5. 向量点积规则:若 F(t) 和 G(t) 是两个向量值函数,则 (F(t)·G(t))' = F'(t)·G(t) + F(t)·G'(t)六、实例分析考虑一个二维向量值函数 F(t) = (t², sin(t)),我们将通过求导来计算其导数。
向量点乘 求导
向量点乘求导
向量点乘求导是指对两个向量进行点乘运算后,对其中一个向量进行求导的过程。
点乘运算的结果是一个标量,因此对其中一个向量求导可以转化为对结果的求导。
根据向量点乘的定义,点乘的结果等于两个向量对应分量相乘后的和,因此可以利用链式法则和求导的基本规则对点乘进行求导。
具体来说,如果有向量
$mathbf{a}=(a_1,a_2,cdots,a_n)$和向量
$mathbf{b}=(b_1,b_2,cdots,b_n)$,则它们的点乘结果可以表示为$mathbf{a}cdot mathbf{b}=a_1 b_1+a_2 b_2+cdots+a_n b_n$。
如果要对向量$mathbf{a}$进行求导,则需要先将点乘转化为函数形式,即$f(mathbf{a})=mathbf{a}cdot mathbf{b}$,然后利用链式法则和求导的基本规则进行求导。
最终的结果是$frac{df}{da_i}=b_i$,即向量$mathbf{b}$中第$i$个分量的值。
- 1 -。
向量范数求导
向量范数求导向量范数是向量的大小或长度的度量方式。
在机器学习和优化领域中,向量范数是一个非常常见的概念。
要想求导向量范数,我们需要了解一些基础知识。
首先,向量的范数有不同的定义方式,其中最常见的是欧几里得范数(也称为L2范数)和曼哈顿范数(也称为L1范数)。
欧几里得范数定义为向量各元素平方和的平方根,即||x||_2 =sqrt(sum(x_i^2)),而曼哈顿范数定义为向量各元素绝对值之和,即||x||_1 = sum(|x_i|)。
对于向量的范数求导,我们需要使用链式法则。
设f(x)是一个标量函数,y=g(x)是一个向量,那么f(g(x))的导数可以表示为:df/dx = (df/dg) * (dg/dx)其中,df/dg是f对向量g的导数,dg/dx是向量g对向量x的导数。
对于欧几里得范数的求导,我们可以先将其展开成平方根形式,即:||x||_2 = sqrt(x^Tx)其中x^T表示x的转置,x^Tx表示x的内积。
我们定义y=x^Tx,则有:||x||_2 = sqrt(y)对y求导,得到:dy/dx = 2x然后再代入链式法则的公式,得到欧几里得范数对向量x的导数: d||x||_2/dx = (1/2) * (1/sqrt(y)) * (dy/dx) = (1/2) *x/||x||_2对于曼哈顿范数的求导,我们可以先将其转化为:||x||_1 = sum(sqrt(x_i^2))然后对每个元素x_i求导,得到:d||x||_1/dx_i = (x_i/|x_i|) * (1/sqrt(x_i^2)) = (x_i/|x_i|) * (1/|x_i|)因为|x_i|取值可能是x_i本身或者-x_i,所以我们可以写成:d||x||_1/dx_i = sign(x_i)其中sign函数表示取x_i的符号。
将每个元素的导数组合起来,得到曼哈顿范数对向量x的导数:d||x||_1/dx = [sign(x_1), sign(x_2), ..., sign(x_n)] 这些是求解向量范数的导数的基本方法。
基本矢量求导
基本矢量求导在向量微积分中,我们经常需要对向量函数进行求导。
基本矢量的求导主要涉及标量函数对矢量的求导以及矢量函数对矢量的求导。
1.标量函数对矢量的求导:假设我们有一个标量函数f(x, y, z) 和一个矢量(\vec{r} = x\hat{i} + y\hat{j} + z\hat{k})。
标量函数对矢量的求导通常指的是梯度。
梯度定义为:(\nabla f = \frac{\partial f}{\partial x}\hat{i} + \frac{\partial f}{\partial y}\hat{j} + \frac{\partial f}{\partial z}\hat{k})这表示函数 f 在点(x, y, z) 处的变化率或斜率。
2.矢量函数对矢量的求导:假设我们有一个矢量函数(\vec{A} = A_x(x, y, z)\hat{i} + A_y(x, y, z)\hat{j} + A_z(x, y, z)\hat{k}) 和另一个矢量(\vec{r} = x\hat{i} + y\hat{j} + z\hat{k})。
矢量函数对矢量的求导通常涉及到雅可比矩阵或全导数矩阵。
雅可比矩阵是一个m×n 矩阵,其中m 和n 是矢量函数和自变量的维数。
对于上述的(\vec{A}) 和(\vec{r}),雅可比矩阵为:(\begin{bmatrix}\frac{\partial A_x}{\partial x} & \frac{\partial A_x}{\partial y} & \frac{\partial A_x}{\partial z} \\frac{\partial A_y}{\partial x} & \frac{\partial A_y}{\partial y} & \frac{\partial A_y}{\partial z} \\frac{\partial A_z}{\partial x} & \frac{\partial A_z}{\partial y} & \frac{\partial A_z}{\partial z} \\end{bmatrix})每一行代表(\vec{A}) 的一个分量对(\vec{r}) 的各个分量的偏导数。
向量值函数及其极值和导数
向量值函数及其极值和导数在高等数学中,向量值函数是函数的一种,它将自变量映射到向量空间中的向量。
向量值函数在物理、工程和计算机图形学等领域中经常被使用,因为它们可以用来描述物体的位置、速度和加速度。
向量值函数的定义向量值函数是一个从实数集合到向量空间的映射,通常可以表示为:$f(t) = \begin{pmatrix} f_1(t) \\ f_2(t) \\ \vdots \\ f_n(t)\end{pmatrix}$其中 $t$ 是自变量, $f_i(t)$ 是 $i$ 维向量的第 $i$ 个分量,$n$ 表示向量的维数。
例如,可以将二维平面上的一条曲线表示为向量值函数:$r(t) = \begin{pmatrix} x(t) \\ y(t) \end{pmatrix}$其中 $x(t)$ 和 $y(t)$ 分别是 $t$ 的函数,表示曲线上每个点的横坐标和纵坐标。
向量值函数的极值类似于标量函数,向量值函数也可以有极值。
但是,向量值函数的极值不是在某个点上取得的,而是在某个时间或区间内取得的。
在一维情况下,一个函数在局部极值的必要条件是它的导数为零或不存在。
同样地,在向量值函数中,它的导数也是一个向量值函数。
只有当这个导数在某个时间或区间内为零或不存在时,原始函数才能取得极值。
一个向量值函数 $f(t) = \begin{pmatrix} f_1(t) \\ f_2(t) \\ \vdots \\ f_n(t) \end{pmatrix}$ 在 $[a, b]$ 区间内取得极大值或极小值的必要条件是 $f'(t) = \begin{pmatrix} f_1'(t) \\ f_2'(t) \\ \vdots \\ f_n'(t)\end{pmatrix} = \begin{pmatrix} 0 \\ 0 \\ \vdots \\ 0 \end{pmatrix}$ 或$f'(t)$ 不存在。