三维图像处理系统组成及实现方案
ORS Dragonfly图像处理与三维重建软件功能介绍及应用
图像处理 成像系统无法摆脱伪影。Dragonfly 的图像处理工具可供用户减轻图像伪影并恢复图像清晰度,
因此重要的图像信息可以显示出来。业界领先的图像过滤器和无限制的可扩展性以及机器学习功能使 用户能够生成具有清晰特征的定量图像。
ORS 公司总部位于加拿大蒙特利尔,其旗舰产品 Dragonfly 是一款三维体数据的可视化与分析软 件,为各类研究所、工程团队、医疗机构提供了处理、查看、分析不同领域三维影像数据的科研与应 用高水平解决方案。
一、功能介绍
Dragonfly 是全球首款集人工智能 (AI) Deep Learning 与 Python 环境开发的软件平台。软件提 供无与伦比的图像分割、一流的图像渲染、功能强大的扩展性等丰富功能以实现用户高效率高精度的 结果输出。Dragonfly 提供中英文操作界面,更易使用和操作。Dragonfly 可应用于生物医学、材料科 学、岩土地质、电子及半导体、工业检测、逆向工程等技术领域,其技术应用及服务由 积社科技 (JService Technology)实施。
二、高级功能
可扩展性—Dragonfly 的 Python 集成* 用户可以直接在应用程序中执行和访问 Dragonfly 数据对象的 Python 脚本,并利用 Python 生态
系统中免费提供的强大图像处理算法构建用户自己的插件。 Dragonfly 全面的 Python 控制台可以轻松执行工作流程,以便您完全能将软件带到任何可以用到
图像渲染 Dragonfly 具有增强显示效果的功能。在这里,深度感知与高度衍变的色彩感知相结合。对图像
激光三维扫描图像处理算法及DSP的实现

g i h he-i nin C odnts ifr t n o h bet I d io ,i ao t TI MS 2 C 0 0 D P a te tredmes o riae nomai fte o jc. n a dt n t d ps ’ T 3 0 60 S n o o i S
d l ina d l e e me t aac mp n ain i cng t na p o i t t - i n i o t u i f be t t eeo e e t n n g n t o e s t , t a e a p rxma e wodme s nC no r n o jc , h rf r eo i s d o o L e o
( olg f rc inIsrmet n t- lcrnc n ier g Ti j ies y Ti j 0 0 2 C l e0 eio ntu n dOpoE eto i E gn ei 。 a i Unv ri 。 a i 3 0 7 ) e P s a s n nn t nn
wel sa clrtn h p e fp o e sn g aa l a ceeaig t es e o rc s ig i d ma ed t.
Ke wo d :DS i g r c s i g ls r3 s a n r y rs P m e p o e sn a e - D c n e a
维普资讯
蛾
ETN MSEN术HIY LRI 子 RE C0 EO电E 量技T N) C C A MT 测 U E G
第81 2年1 0 月 3第 0 1 期 卷
激 光 三 维 扫 描 图像 处 理 算 法及 DS P的 实现 *
孙哲明 葛宝臻
展厅360全息+投影融合解决方案

第一部分360度全息投影系统方案一.概述360度全息投影系统简称360全息,也称360度全息成像、三维全息影像、全息三维成像。
360全息是由透明材料(玻璃或者透明有机板)制成的四面锥体,通过四个视频源在锥体上边或者下边投射到锥体中的特殊棱镜上,根据光学原理,汇集到一起后形成具有真实维度空间的立体影像。
360度全息投影系统主要是由柜体,分光镜面,成像锥体,图像投影和图像处理器五部分组成,对产品进行实拍和构建三维模型,再用电脑数字处理制作成360度旋转动画,通过图像投影设备将动画投射到分光镜面上,再折射到四个面的成像锥体上边,形式360度立体成像,参观者可以360度参观产品,不需要佩戴任何偏光眼镜,在完全没有束缚下就可以尽情观看3D幻影立体显示特效,给人以视觉上的强烈冲击,是一种科技含量高,新颖性强,广受大中型展馆欢迎的多媒体展项。
二.特点360全息特点:1.柜体时尚美观,有科技感。
顶端四面透明,真正的空间成像色彩鲜艳,对比度,清晰度高;具有空间感,透视感。
2.参观者可以360度参观产品,不需要佩戴任何偏光眼镜,可以尽情观看3D幻影立体显示特效。
3.可以结合实际物体,形式空中幻象,实现影像与实物结合,增强产品广告宣传效果。
4.占用空间比较小,可以根据要求定制。
5.灵活性比较强,通常是4个面,也可以做3个面或者2个面。
三.三维全息影像的优越性1.尺寸灵活——360全息系统硬件设备分为成像区与工作区两部分,成像尺寸由1.2M至12M,可根据不同的应用需求进行尺寸选择。
2.安装便捷——360全息系统能根据现有的建筑或安装位置空间来修改硬件的体系和结构,有利于在各种建筑和城市空间里永久安装。
3.内容多样——360全息系统可根据需求随时更换数字内容。
四.环境要求360全息对环境亮度有一定要求,避免强光高亮度,亮度越暗效果越好。
五.原理360全息是制作好的产品动画通过图像投影设备投射到分光镜面上,基于分光镜成像原理,动画折射到成像锥体上边,形式360度立体成像,参观者可以360度参观产品,不需要佩戴任何偏光眼镜。
DSP+FPGA 多种设计方案

1,DSP+FPGA 实时信号处理系统2,FPGA+DSP实时三维图像信息处理系统3,采用FPGA+DSP结构的多通道高速数据采集与实时图像处理系统的设计与实现方案4,基于DSP与FPGA的蓝牙数据采集系统设计5,基于DSP和FPGA的通用图像处理平台设计6,基于FPGA+DSP的实时图像处理系统设计与实现7,基于DSP的实时图像目标搜索与跟踪系统设计1,DSP+FPGA 实时信号处理系统实时信号处理系统要求必须具有处理大数据量的能力,以保证系统的实时性;其次对系统的体积、功耗、稳定性等也有较严格的要求。
实时信号处理算法中经常用到对图象的求和、求差运算,二维梯度运算,图象分割及区域特征提取等不同层次、不同种类的处理。
其中有的运算本身结构比较简单,但是数据量大,计算速度要求高;有些处理对速度并没有特殊的要求,但计算方式和控制结构比较复杂,难以用纯硬件实现。
因此,实时信号处理系统是对运算速度要求高、运算种类多的综合性信息处理系统。
1信号处理系统的类型与常用处理机结构根据信号处理系统在构成、处理能力以及计算问题到硬件结构映射方法的不同,将现代信号处理系统分为三大类:·指令集结构(ISA)系统。
在由各种微处理器、DSP处理器或专用指令集处理器等组成的信号处理系统中,都需要通过系统中的处理器所提供的指令系统(或微代码)来描述各种算法,并在指令部件的控制下完成对各种可计算问题的求解。
·硬连线结构系统。
主要是指由专用集成电路(ASIC)构成的系统,其基本特征是功能固定、通常用于完成特定的算法,这种系统适合于实现功能固定和数据结构明确的计算问题。
不足之处主要在于:设计周期长、成本高,且没有可编程性,可扩展性差。
·可重构系统。
基本特征是系统中有一个或多个可重构器件(如FPGA),可重构处理器之间或可重构处理器与ISA结构处理器之间通过互连结构构成一个完整的计算系统。
从系统信号处理系统的构成方式来看,常用的处理机结构有下面几种:单指令流单数据流(SISD)、单指令流多数据流(SIMD)、多指令流多数据流(MIMD)。
pacs方案

pacs方案简介PACS(Picture Archiving and Communication System)是一种用于医学图像的存储、检索、传输和显示的系统。
它的任务是将医学图像和相关数据进行数字化,并在医疗机构内部或跨机构中共享和传输。
PACS方案主要由两大部分组成:图像获取设备和图像存储管理系统。
本文将对PACS方案的功能、架构和实施流程进行详细介绍。
功能PACS方案的主要功能包括以下几个方面:1.图像获取和存储:通过各类医学图像设备(如CT、MRI等)获取图像数据,并将其存储到PACS系统中。
图像数据可以是传统的二维图像,也可以是三维、四维图像。
2.图像传输和共享:PACS系统可以实现图像数据的远程传输和共享。
通过网络,医生可以远程访问和查看患者的图像数据,从而提供诊断和治疗的支持。
3.图像检索和管理:PACS系统提供了强大的图像检索和管理功能,医生可以根据患者信息(如患者ID、姓名、日期等)或图像特征(如器官、病变等)进行检索和浏览。
4.图像显示和分析:PACS系统提供了多种图像显示和分析工具,医生可以对图像进行放大、缩小、旋转等操作,同时还可以利用图像分析算法进行自动诊断。
5.安全和隐私保护:PACS系统采用多层次的安全措施,包括身份验证、数据加密和访问控制等,以保护患者的隐私和保密性。
架构PACS方案的典型架构由以下几个组件组成:1.图像获取设备:包括各类医学图像设备,如CT、MRI、超声等。
它们负责将采集的图像数据进行数字化,并通过网络将数据发送到PACS系统。
2.PACS服务器:是PACS系统的核心组件,用于存储、管理和传输图像数据。
PACS服务器由图像存储和图像管理两部分组成。
3.图像存储:负责存储和管理图像数据,包括接收图像数据、进行数据压缩和加密、进行存储和备份等操作。
4.图像管理:负责图像的索引、检索和传输,包括对图像数据进行标记和分类、提供图像检索接口和图像传输接口等。
xxxx重点部位--实景三维建模技术方案

Xxxxx 重点安保部位无人机实景三维建模技术方案目录1 概述 (2)1.1 项目概述 (2)1.2 项目内容 (2)1.3 作业区概况 (2)1.4 引用文件 (3)2 技术方案 (4)2.1 高分辨率倾斜航空影像采集 (5)2.2 高精度像控点采集 (14)2.3 全自动空三及自动建模 (19)2.4 三维模型场景精细化处理 (24)3 成果质检 (35)3.1 质量保障体系 (35)3.2 质量控制方案 (36)1 概述1.1项目概述本方案旨在使用基于无人机倾斜摄影测量的实景三维建模技术,对xxxxxxxx进行外业航飞及像控测量,并将采集的数据进行自动化三维建模,生成可视化三维场景;并对实景三维模型进行精细化建模,完成测区模型精细化渲染,满足三维可视化安防管理平台。
1.2项目内容1.3作业区概况(1)xxxxxxxxxxxxxxxx标志性建筑之一。
航飞总面积约为1.5平方公里,设计航飞分辨率为2~3cm;采集高精度像控点,对三维场景做进行精细化建模。
(2)xxxxxx航飞总面积约为1平方公里,设计航飞分辨率为2~3cm;采集高精度像控点,对三维场景做进行精细化建模。
(3)xxxxxxx航飞总面积约为1平方公里,设计航飞分辨率为2~3cm;采集高精度像控点,对三维场景做进行精细化建模。
1.4 引用文件➢《低空数字航空摄影规范》(CH/Z 3005-2010);➢《1:500、1:1000、1:2000 航空摄影测量内业规范》(GB/T7930-2008);➢《全球定位系统(GPS)测量规范》(GB/T18314-2009);➢《航空摄影技术设计规范》(GB/T 19294-2003);➢《数字航空摄影测量空中三角测量规范》(GB/T 23236-2009);➢《城市三维建模技术规范》(CJJ/T 157-2010);➢《三维地理模型数据产品规范》(CH/T 9015-2012);➢《三维地理信息模型生产规范》(CH/T 9016-2012);➢《数字测绘产品检查验收规定和质量评定》(GB/T18316-2008);➢《测绘成果质量检查与验收》GB/T24356—2009。
sirovision摄影测量岩体结构分析系统
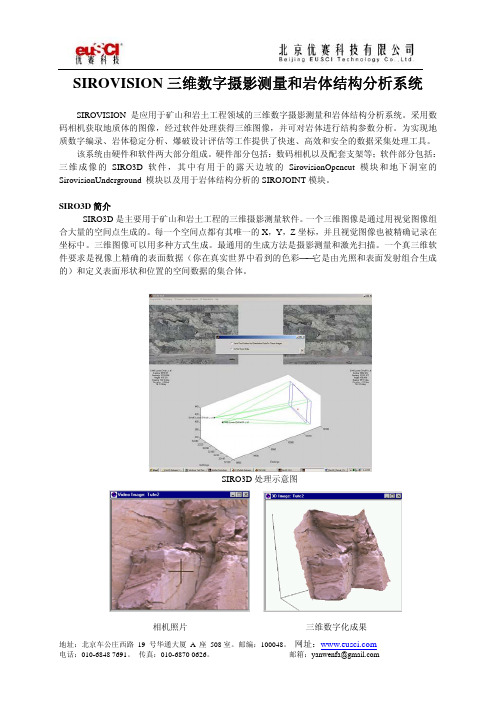
SIROVISION三维数字摄影测量和岩体结构分析系统SIROVISION是应用于矿山和岩土工程领域的三维数字摄影测量和岩体结构分析系统。
采用数码相机获取地质体的图像,经过软件处理获得三维图像,并可对岩体进行结构参数分析。
为实现地质数字编录、岩体稳定分析、爆破设计评估等工作提供了快速、高效和安全的数据采集处理工具。
该系统由硬件和软件两大部分组成。
硬件部分包括:数码相机以及配套支架等;软件部分包括:三维成像的SIRO3D软件,其中有用于的露天边坡的SirovisionOpencut模块和地下洞室的SirovisionUnderground 模块以及用于岩体结构分析的SIROJOINT模块。
SIRO3D简介SIRO3D是主要用于矿山和岩土工程的三维摄影测量软件。
一个三维图像是通过用视觉图像组合大量的空间点生成的。
每一个空间点都有其唯一的X,Y,Z坐标,并且视觉图像也被精确记录在坐标中。
三维图像可以用多种方式生成。
最通用的生成方法是摄影测量和激光扫描。
一个真三维软件要求是视像上精确的表面数据(你在真实世界中看到的色彩——它是由光照和表面发射组合生成的)和定义表面形状和位置的空间数据的集合体。
SIRO3D处理示意图相机照片三维数字化成果SIROJOINT简介SIROJOINT可以帮助用户测量分析岩体的结构参数,并通过三维图像进行可视化的岩体结构的分析的工具软件。
SIROJOINT集成了三维空间数据和二维图像,从而向用户提供分析岩体表面精确三维形貌的能力,分析不连续面的倾向,走向和间距等参数。
它提供了运用岩体精确记录在真实坐标系统的空间数据进行显示和分析的工具。
地下工程摄影测量硬件系统图三维图像与投影图结构面等直线分析图精确性和精度SirovisionOpencut、SirovisionUnderground是和SIROJOINT一起用来对岩体结构填图的。
该软件的设计目的既然基于上述目的,所以在3D空间中,面走向的精确性就是其特别关注的焦点。
基于计算机的三维医学图像处理方法——图像分割技术
文献标识码 : A
文章编号 :6 1 35(0 8 1 0 5 -0 17 -5 6 20 】2- 0 1 3
0 引言
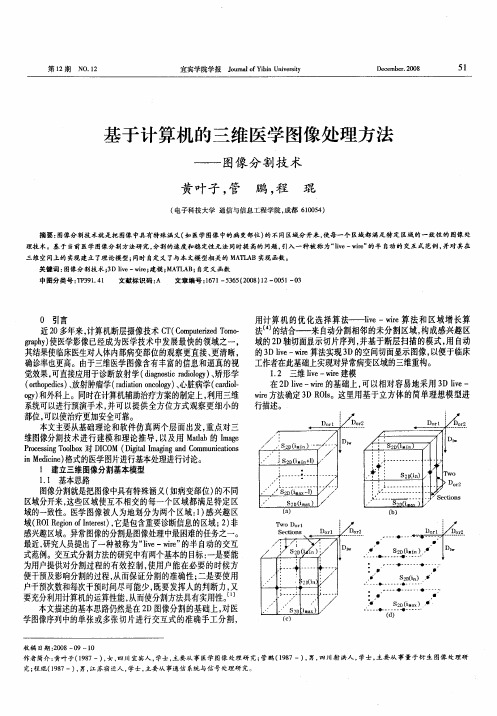
近2 多年来, O 计算机断层摄像技术 C (optidTm- T Cm ure oo ez g py使医学影像已经成为医学技术中发展最快的领域之一, r h) a 其 结果使临 床医生对人体内部病变部位的观察更直接、 更清晰, 确 诊率也更高。由于三 维医 学图像含有丰富的信息和逼真的视 觉效果, 可直接应用于诊断放射学(i nscm ioy 、 d got d l ) 矫形学 a i og (roei )放射肿瘤学( d tnoeo )心脏病学(a i— ohpds、 t c r ii og 、 a ao n ly cro dl o)和外科上。同时在计算机辅助治疗方案的制定上 , g) r 利用三维 系统可以进行预演手术 , 并可以提供全方位方式观察更细小的 部位, 可以使治疗更加安全可靠。 本文主要从基础理论和软件仿真两个层面出发, 重点对三 维图像分割技术进行建模和理论推导, 以及用 M db Iae aa 的 mg
i M in) n e c e格式的医学图片进行基本处理进行讨论。 d i l 建立三维图像分割基本模型 11 基本思路 . 图像分割就是把图像中具有特殊涵义( 如病变部位) 的不同 区域分开来, 这些区域使互不相交的每一个区域都满足特定区 域的一致性。医学图像被人为地划分为两个区域:) 1 感兴趣区 域(O ei Ie s , R I gn fn rt 它是包含重要诊断信息的区域; ) R o o te ) 2非 感兴趣区域。异常图像的分割是图像处理中最困难的任务之一。 最近, 研究人员提出了一种被称为“i — i ” le w e 的半 自动的交互 v r 式范例。交互式分割方法的研究中有两个基本的目 : 标 一是要能 为用户提供对分割过程的有效控制, 使用户能在必要的时候方 便干预及影响分割的过程, 从而保证分割的准确性; 二是要使用 户干预次数和每次干预时间尽可能少, 既要发挥人的判断力, 又 要充分利用计算机的运算性能, 从而使分割方法具有实用性。 … 本文描述的基本思路仍然是在 2 D图像分割的基础上, 对医 学图像序列中的单张或多张切片进行交互式的准确手工分割,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三维图像处理系统组成及实现方案
三维图像信息处理一直是图像视频处理领域的热点和难点,目前国内外成熟的三维信息处理系统不多,已有的系统主要依赖高性能通用PC完成图像采集、预处理、重建、构型等囊括底层和高层的处理工作。
三维图像处理数据量特别大、运算复杂,单纯依靠通用PC很难达到实时性要求,不能满足现行高速三维图像处理应用。
本系统中,采用FPGA实现底层的信号预处理算法,其处理数据量很大,处理速度高,但算法结构相对比较简单,可同时兼顾速度和灵活性。
高层处理算法数据量较少、算法结构复杂,可采用运算速度快、寻址方式灵活、通信机制强大的DSP实现[1,4]。
1 三维图像处理系统组成
1.1 硬件系统构成
该系统由五个模块组成,如图1所示。
系统信息处理流程见图2所示。
CCD摄像机采集的多路模拟视频信号经MAX440按需要选定后,送入模数视频转换器SAA7111A将摄像机输出的模拟全电视信号CVBS转换成数字视频信号;之后视频信号流入图像预处理器Spartan XC3S400,经过提取中心颜色线、提取激光标志线和物体轮廓线的预处理后,配送到两片TS201进行定标参数计算、坐标计算、三维重建、数据融合以及三维构型的核心运算;最后将DXF文件数据经由PCI接口传送到PC,完成三维图像变换和显示等最终处理;整个系统的逻辑连接和控制以及部分数据交换由另一片FPGA来完成[1]。
在体系结构设计上,FPGA处理器采用SIMD结构,在一个控制单元产生的控制信号下,数据通路中的三个算法并行运行。
由于该系统要求处理速度较高,因而在数据通路中采用了流水线技术以提高速度。
此外,本系统中为图像存储采用了许多大容量高速FIFO,以达到减少地址线,简化控制的目的。
1.2 处理器芯片
为满足系统大数据量快速处理的要求,三款核心芯片均为最新高性能产品,其硬件方面的。