发那科系统参数调整
FANUC数控系统的常用维修调整参数及设置

FANUC数控系统的常⽤维修调整参数及设置第⼆参考点参数发那科数控系统光栅⽣效NO.1815.1=1 FSSB开放相应接⼝。
⼆、进给轴控制相关参数1423 ⼿动速度1424 ⼿动快进1420 G00快速1620 加减速时间1320 软件限位1326三、回零相关参数NO.1620 快进减速时间300msNO.1420 快进速度 10mNO.1425 回零慢速NO.1428 接近挡铁的速度NO.1850 零点偏置四、SP调整参数NO.3701.1=1 屏蔽主轴NO.4020 电机最⼤转速NO.3741 主轴低档转速(最⾼转速)NO.3742 主轴⾼档转速(最⾼转速)NO.4019.7=1 ⾃动设定SP参数(即主轴引导)NO.4133 主电机代码NO.3111.6=1 显⽰主轴速度NO.3111.5=1 显⽰负载监视器NO.4001.4 主轴定位电压极性(定位时主轴转向)NO.3705.1=1 SOR⽤于换档NO.3732=50 换档速度NO.4076=33 定位速度NO.4002.1=1 外接编码器⽣效NO.4077 定位脉冲数(主轴偏置)NO.3117.0=1 显⽰主轴负载表第⼆参考点参数OM系列:735~738;X/Y/Z/4Oi系列:1241采⽤绝对编码器时,先将参数#1815.4改为0,当回零位置发⽣变化以后,第⼆参考点位置也会发⽣变化。
因此第⼆参考点的数值(参数:1241),就要重新设置,⽅法是先将该轴回零,然后⽤⼿脉将该轴摇⾄原先的位置(特别是换⼑点的轴要与机械⼿配合),这时显⽰器上该轴的数字再乘以每脉冲所⾛的距离的倒数,如0.001us/单脉冲,即乘以1000,输⼊到1241⾥去,可能要经过⼏次修调。
才能确定第⼆参考点。
数值输⼊完后,将#1815.4改为 1。
2,存储⾏程软限位参数O系列:700~702,对应 X/ Y/ Z轴设置值:0~9999999当设置 9999999 时,取消正⽅向软限位703;707,对应 4;-4,⼀般为回转轴704~706,对应-X/-Y/-Z轴设量值:0~ -9999999当设置为 -9999999 时。
发那科系统参数调整
3108#7实际手动速度显示
3111#0伺服调整画面显示
3111#1主轴监控画面显示
3111#5操作监控画面显示
3112#0伺服波型画面显示,需要时1,最后要
为0。
2022/10/15
26
3201,3202,3220,3221,3290程序保护。
会停止。按 RESET键停止参数的输出。
7
通过阅读机/穿孔机 接口输入参数
• (1) 将NC置于急停状态。
• (2) 使参数处于可写状态。
– 1. 按 功能键一次或多次,再按操作选择软件
[SETTING],显示出参数设定画面。
– OFFSET SETTING 2 . 移 动 光 标 , 将 光 标 置 于
20
20
• 5.1400-1600有关速率参数。
如:1401#0=0从接通电源到返回参考点期间,
手动快速运行无效
1402#1=0JOG倍率有效
1410空运行速度
1420各轴快速速度
1422最大切削进给速度
1423各轴JOG速度
1424各轴手动快速移动速度
1425各轴回参考点FL速度
1430各轴最大切削进给速度。
“PARAMETERWRITE” = 1。这样参数成为可写入状态,同时
2022/10/15
3
CNC发生P/S报警100(允许参数写入)。
3
• (3) 按功能键SYSTEM一次或多次后,再按软键
[PARAM],显示参数画面。
• (4) 显示包含需要设定的参数的画面,将光标置于
需要设定的参数的位置上。
行自动初始化。断电再上电后,系统会自动加载部分
电机参数,如果在参数手册上查不到代码,则输入最
FANUC数控系统参数设定及修改

FANUC数控系统参数设定及修改(1)打开参数写保护开关①将NC置于MDI方式或急停状态。
②用以下步骤使参数处于可写状态。
按SETTING功能键一次或多次后,再按软键[SETTING],可显示SETTING画面的第一页;将光标移至“参数写入”处,将其设为1。
图5-1-4 打开参数写保护开关打开写参数的权限后,系统会出现100号报警,并自动切换到报警页面。
可以设定参数3111#7(NPA)为1,这样出现报警时系统页面不会切换到报警页面。
通常,发生报警时必须让操作者知道,因此上述参数应设为0。
同时按下RESET+CAN键,可消除100号报警。
图5-1-5 100号报警画面(2)进入参数设定界面按MDI键盘上的”SYSTEM”功能键多次或按下”SYSTEM”功能键后,再按软键“参数”,进入参数界面。
图5-1-6 参数画面(3)输入参数号,点击[号搜索]软键,根据参数号查找参数。
(4)参数修改图5-1-7 修改参数将光标移动至待修改的参数,输入要设定的数据,然后按[输入]软键,即可完成参数的设定。
5.参数备份与恢复参数备份的步骤如下:(1)系统置于MDI或急停状态下;(2)在CNC设定画面将20号参数设为4;(3)插入存储卡;(4)机床操作面板上选择“编辑”模式;(5)顺序按下“SYSTEM”键,显示参数画面;(6)在参数画面,顺序按下软键“操作”、“F输出”、“全部”、“执行”,输出CNC参数,输出文件名为“CNC-PARA.TXT”。
参数恢复的步骤如下:(1)系统置于MDI或急停状态下;(2)在CNC设定画面将20号参数设为4;(3)插入存储卡;(4)将参数写保护开关打开;(5)机床操作面板上选择“编辑”模式;(6)顺序按下“SYSTEM”键,显示参数画面;(7)在参数画面,顺序按下软键“操作”、“F输入”、“执行”,输入CNC参数;(8)切断CNC电源再通电。
FANUC数控系统参数设定

• 14.6095-6097宏程序调用参数。
• 15.6100-6499有关格式、跳转、刀补、 外部数据输入/输出参数。
• 16.6500-6700图形显示参数。 如:MD6561-6595图形色彩编码。
• 17.6700-6800运行时间、零件计数参数。 • 18.6800-7000刀具寿命、位置开关参数。 • 19.7001-7117有关手动、自动、手轮进给参数。
• 设定相关的电机速率(3741,3742,3743等)参 数,在MDI画面输入M03 S100,检查主轴运行是 否正常。(不用串行主轴时,将参数3701#1(ISI) 设为1,屏蔽串行主轴。3701#4(SS2)设定为0 是不使用第二串行主轴,否则出现750报警)
• 注:若在PMC中MRDY信号没有置1,则参数 4001#0设为0。
• 10.3400-3600有关编程参数。 如:3401#0使用小数点的地址字,省略了小数点 时=0微米,=1毫米
3402#0在接通电源及清除状态时的模态
=0 G00,=1 G01
• 11.3600-3700螺距误差补偿参数。 如:3620 各轴参考点的螺距误差补偿号码0~1023
设定33为参 考点的螺距 误差补偿点 的号码
2018-6-26
1
24
• 3621 各轴负方向最远端的螺距误差补偿点的 号码0~1023
• 3622 各轴正方向最远端的螺距误差补偿点的 号码0~1023
• 3623 各轴螺距误差补偿倍率0~1023 • 3624 各轴的螺距误差补偿点的间距
1
• 12.3700-4900主轴参数。 如:3701#1=0使用第1、第2主轴串行接口
• 4.1300-1400有关工作区限制参数。 如:1320 各轴存储式行程检测1的正方向边
FANUC系统参数分析和调整解析

FANUC系统参数分析和调整解析FANUC是一个著名的日本工业机器人生产厂商,其生产的机器人系统广泛应用于各个行业的生产线。
FANUC系统参数的分析和调整是机器人操作的关键环节之一,合理的参数设置可以保证机器人的正常运行,提高生产效率和质量。
本文将从系统参数的基本概念、分析和调整方法等方面来进行解析。
首先,需要明确什么是FANUC系统参数。
FANUC系统参数是指机器人控制系统中的一些基础设置,包括速度、加减速度、力矩、位置等参数值,这些参数值会直接影响到机器人的运动性能。
因此,合理地分析和调整这些参数值是非常重要的。
在进行FANUC系统参数分析和调整之前,需要了解机器人的运动学特性和工作环境等相关因素。
运动学特性包括机器人的结构、关节类型、自由度等,而工作环境包括机器人所处的工作空间、工件的形状和重量等。
了解这些因素可以帮助确定适合的参数范围。
对于FANUC系统参数的分析,首先需要根据具体情况选择合适的参数进行测试。
通过调整一些参数值,例如速度,观察机器人在不同速度下的运动情况,可以得出机器人的最佳运行速度范围。
同样地,加减速度、力矩、位置等参数也可以通过类似的方法进行分析。
在进行FANUC系统参数的调整时,需要考虑到机器人的稳定性和安全性。
参数值的调整应该从小范围内逐渐进行,观察机器人在不同参数值下的表现,并根据需求进行适当的调整。
同时,也需要注意机器人的加速度和减速度是否过高,以及机器人在运动过程中的力矩是否过大,以避免机器人发生过载等问题。
除了通过测试和观察来进行参数分析和调整外,还可以使用FANUC提供的软件工具进行辅助。
FANUC提供了一系列的参数配置软件,可以直观地设置和调整各个参数值,并提供参数默认值和范围等参考信息。
总结起来,FANUC系统参数的分析和调整是保证机器人正常运行的重要环节。
合理设置参数值可以提高机器人的运动效率和精度,从而提高生产效率和质量。
参数分析和调整需要根据具体情况和需求进行,通过测试、观察和软件工具的辅助来完成。
FANUC数控系统参数设定
FANUC数控系统参数设定
FANUC数控系统是市场上非常常见的一种数控系统,其具有广泛的应用领域和强大的功能。
在使用FANUC数控系统时,我们可以根据需要对其参数进行设定和调整,以满足不同加工需求。
下面是关于FANUC数控系统参数设定的详细说明。
1.通用参数设定
FANUC数控系统的通用参数设定包括一些与机床性能和操作方式相关的参数。
通过调整这些参数,可以适应不同机床的需求。
例如,手轮倍率参数可以调整手轮转动对机床的影响程度,传动比参数可以调整伺服电机运动的速度和精度。
通用参数设定一般由设备厂家根据机床具体情况进行调整。
2.插补参数设定
FANUC数控系统的插补参数设定是用来控制数控系统的插补运算和插补算法的参数。
这些参数可以调整机床对复杂轮廓的处理能力和精度。
插补参数设定包括加速度和减速度参数、滤波参数、线性插补误差补偿参数等。
通过调整这些参数,可以提高机床的加工精度和效率。
3.工具补偿参数设定
FANUC数控系统的工具补偿参数设定是用来控制工具半径补偿和工具长度补偿的参数。
工具补偿参数设定包括刀具半径、工具长度、刀具补偿向量方向等参数。
通过调整这些参数,可以实现对不同工具的补偿,提高加工精度。
4.程序保护参数设定
5.通讯参数设定
总之,FANUC数控系统的参数设定可以根据实际加工需求进行灵活的
调整和配置,使数控系统更加适应不同的加工任务。
通过合理的参数设定,可以提高机床的加工精度和效率,保证加工质量。
同时,设定好的参数也
可以提高操作的安全性,保护程序的机密性。
FANUC系统参数分析和调整
FANUC系统参数分析和调整FANUC系统参数是指用于调整和配置FANUC控制器操作的一组参数。
这些参数可以影响机床的性能和工作方式。
通过系统参数的分析和调整,可以优化机床的运行和加工效果。
下面将就FANUC系统参数的分析和调整进行详细介绍。
其次,进行FANUC系统参数的分析和调整时,需要有一套科学的方法和步骤。
首先,需要根据实际需要,确定需要分析和调整的系统参数范围。
然后,通过参数手册或操作界面,获取相应的参数数值。
接下来,需要分析当前的参数设置对机床性能和加工效果的影响。
可以通过实际加工试验、工件测量以及观察机床运行情况等方式进行分析。
如果发现参数设置存在问题,可以根据实际需求进行适当的调整。
在调整参数时,需要注意参数范围的合理性和相应的参数之间的关系。
最后,需要对调整后的参数进行测试和验证,确保参数设置的有效性和可靠性。
最后,掌握FANUC系统参数的分析和调整需要进行长期的学习和实践。
FANUC系统参数较为复杂,需要具备一定的机床操作和维护经验。
此外,还需要了解FANUC系统的工作原理和机床运行的相关知识。
可以通过参加培训班、阅读相关文献以及与经验丰富的技术人员交流等方式进行学习。
通过实际操作和实践,逐步提高对FANUC系统参数分析和调整的能力。
总之,FANUC系统参数的分析和调整是机床操作和维护中的重要工作。
正确的参数设置可以优化机床的性能和加工效果,提高生产效率。
通过系统参数的科学分析和合理调整,可以使机床正常运行,并满足实际加工需求。
但是,需要注意参数设置的合理性和相应的参数之间的关系,以及进行长期的学习和实践。
这样,才能真正掌握FANUC系统参数分析和调整的技巧,提高机床操作和维护的水平。
发那科系统参数调整资料
发那科系统参数调整资料一、引言发那科系统参数调整是指对发那科机器人系统的各项参数进行细微调整,以使机器人的运动更加精确、稳定和高效。
良好的系统参数设置可以提高机器人的精度和速度,降低系统故障和能源消耗。
本文将从三个方面介绍发那科系统参数调整的方法和注意事项。
二、系统参数1.传动参数:包括减速比和轴向间隙。
减速比会影响到机械臂的运动速度和扭矩输出,调整时需根据具体需求进行设置。
轴向间隙是指机械臂在轴向移动时的空隙,过大的间隙会使机械臂运动不准确。
2.位置参数:包括机械臂的起始位置和工作空间范围。
机械臂的起始位置应该根据具体工作任务来设置,使机器人在启动时能够快速定位到指定位置。
工作空间范围决定了机械臂可以达到的最大范围,需要根据工作需求和安全考虑进行设置。
3.运动参数:包括速度、加速度和减速度。
这些参数会直接影响机械臂的运动速度和稳定性。
过高的速度和加速度可能导致机械臂震动或失控,过低则会影响工作效率。
调整时需根据具体工作需求和机器人的负载情况进行设置。
三、参数调整方法1.准备工作:在进行参数调整前,必须确保机器人系统已经正常安装和调试完成,并且机械臂没有异常故障。
同时,需要备份系统原始参数,以免出现无法恢复的错误。
2.单一参数调整:在调整参数时,建议逐个参数进行调整,并进行实时观察和测试。
首先将要调整的参数变动到一个较低的值,然后逐渐增加,直到达到最佳效果为止。
3.多参数协同调整:在机器人系统运行过程中,一般需要同时调整多个参数以获得最佳的运动效果。
在进行多参数调整时,建议先调整与位置相关的参数,再调整速度和加速度等参数,最后再微调其他参数。
四、参数调整注意事项1.慎重调整:在进行参数调整时,要小心谨慎,并进行逐步试验,避免一次调整过大而导致机器人运动不稳定或发生故障。
2.多次测试:在调整参数后,需要进行多次测试,以确保调整后的参数能够正常工作。
测试时要观察机器人的运动轨迹、速度和准确度,确保调整效果符合要求。
发那科数控系统相对值栅格量调整参数
发那科数控系统相对值栅格量调整参数一、概念解析在发那科数控系统中,相对值栅格量调整参数是指根据加工零件的特点和要求,通过调整相对值栅格量的大小来控制数控机床在加工零件时的运动轨迹和速度。
相对值栅格量的大小直接影响着数控机床的加工精度和效率,因此合理调整该参数对于提高加工质量和效率至关重要。
二、影响因素1. 零件特点:不同形状、尺寸和材料的零件对相对值栅格量的要求不同,如细密的零件需要较小的相对值栅格量,而粗大的零件则需要较大的相对值栅格量。
2. 加工要求:不同加工要求对相对值栅格量的大小有着明确的要求,如精密加工需要较小的相对值栅格量,而粗加工则需要较大的相对值栅格量。
3. 数控系统性能:数控系统自身的性能和精度也会影响相对值栅格量的调整,高性能的数控系统可以更精细地控制相对值栅格量,从而实现更高的加工精度。
三、调整方法1. 根据零件特点和加工要求,确定相对值栅格量的初始数值。
2. 在数控系统中找到相对值栅格量调整参数的设置位置,根据初始数值逐步调整,观察加工效果并进行实时调整,直至达到理想的加工效果。
3. 在调整过程中,要注意及时保存调整后的参数数值,以便下次使用时可以直接加载,提高调整效率。
四、个人观点相对值栅格量的调整是数控加工中的重要环节,我认为在实际应用中需要根据具体情况灵活调整,不能一概而论。
结合数控系统的性能和加工要求,进行综合考虑和合理调整,才能达到最佳的加工效果。
发那科数控系统相对值栅格量调整参数对于数控加工至关重要,合理调整可以提高加工质量和效率,需要结合零件特点、加工要求和数控系统性能进行综合考虑和灵活调整。
希望通过本文的解析,读者能对该参数有更深入的了解,并在实际应用中取得更好的加工效果。
至此,我希望本文对您有所帮助,在您的工作和学习中能够更好地理解和应用发那科数控系统相对值栅格量调整参数。
感谢阅读!发那科数控系统相对值栅格量调整参数对数控加工的重要性不言而喻。
在现代工业生产中,数控加工已经成为主流,而相对值栅格量的合理调整则是保证加工质量和效率的关键之一。
FANUC系统参数和调整资料
FANUC系统参数和调整资料FANUC系统参数是机床控制系统的一部分,它可以帮助配置和调整机床的各种参数,以满足特定的生产需求和操作要求。
系统参数涵盖了各个方面,包括机床的速度、精度、工具刀具的使用和切削参数,以及其他一些功能和操作上的设定。
首先,FANUC系统参数中最重要的一部分是速度参数。
在机床的加工过程中,需要设置合适的速度来确保加工效率和加工质量。
这些参数包括进给速率、快速移动速度、主轴旋转速度等。
进给速率决定了机床在工件上加工时进给的速度,快速移动速度决定了机床在空移或者换刀时的移动速度,主轴旋转速度决定了机床切削时刀具的旋转速度。
其次,精度参数也是非常重要的一部分。
精度参数用于定义机床的精确度和重复性。
例如,位置精度参数用于确定机床在加工过程中的坐标定位精度。
角度精度参数用于确定机床在加工过程中的角度定位精度。
这些参数可以根据特定的生产需求进行调整,以便确保机床在加工过程中达到所要求的精度。
此外,FANUC系统参数中还包括工具刀具的使用和切削参数。
这些参数用于配置工具刀具的类型、尺寸和使用方式。
例如,刀具参数用于定义刀具的长度、直径和刃数。
切削参数用于定义刀具的进给速率、切削深度和切削速度。
通过调整这些参数,可以确保机床在加工过程中使用合适的刀具,并按照所要求的方式进行切削。
最后,FANUC系统参数中还包括其他一些功能和操作上的设定。
例如,可以通过参数设置实现机床的自动换刀功能。
还可以设置机床的报警和故障监测功能,以及机床的联机通信功能。
这些参数可以根据具体的生产需求进行调整,以满足生产工艺和操作要求。
综上所述,FANUC系统参数是机床控制系统中非常重要的一部分。
它可以帮助配置和调整机床的各种参数,以满足特定的生产需求和操作要求。
通过合理地设置这些参数,可以提高机床的加工效率和加工质量,同时确保机床的稳定性和安全性。
因此,对于机床操作人员和维护人员来说,了解和掌握FANUC系统参数的相关知识非常重要。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• ( 3 ) 按 SYSTEM 一次或多次,再按 [PARAM] 软键选择参数画面。 • (4) 按[(OPRT)]软键显示操作选择软键,再按 右边的继续菜单软键,显示出包含 [READ] 软键 的另一组操作选择软键。
2016/7/3 1
8
8
• (5) 按[READ]软键,软键的显示变化如下:
• (6) 按[EXEC] 软键,从输入/输出设备开始输 入参数。正在输入参数时,画面下部状态显示上 的“INPUT”会闪烁。
26
• 10.3400-3600有关编程参数。 如:3401#0使用小数点的地址字,省略了小数点 时=0微米,=1毫米 3402#0在接通电源及清除状态时的模态 =0 G00,=1 G01 • 11.3600-3700螺距误差补偿参数。 如:3620 各轴参考点的螺距误差补偿号码0~1023
设定33为参 考点的螺距 误差补偿点 的号码
2016/7/3
1
24
24
• 8. 3000-3099有关I/O的参数。 如: 3003#0互锁信号无效,*IT(G8.0) 3003#2各轴互锁信号无效,*IT1-4 (G130) 3003#3各轴方向互锁信号无效,*IT1-4 (G132,G134) 3003#5减速信号极性 3004#5=1超程限位信号无效
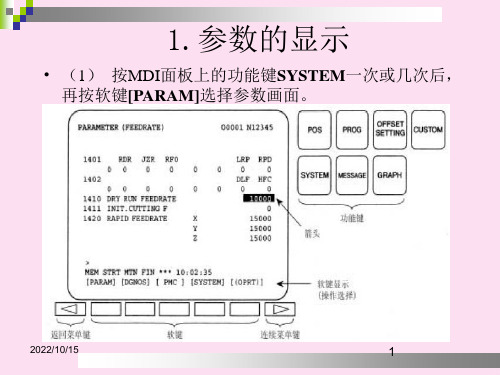
1.参数的显示
• (1) 按MDI面板上的功能键SYSTEM一次或几次后, 再按软键[PARAM]选择参数画面。
2016/7/3
1
1
1
( 2 ) 参数画面由多页组成。通过( a)( b )两 种方法显示需要显示的参数所在的页面。 (a)用翻页键或光标移动键,显示需要的页面。 (b)从键盘输入想显示的参数号,然后按软键 [NO.SRH]。这样可显示包 –括指定参数所在的页面,光标同时在指定参 数的位置(数据部分变成反转 –文字显示)。 –注 用操作选择软键显示的软键一旦开始输 入,软键显示将包括[NO.SRH]在内的操作选 择软键自动取代。按[OPRT]软键也能变更操 作选择软键的显示。
2016/7/3
1
25
25
• 9.3100-3400有关显示参数。 如:3100#7显示器类型,0单色,1彩色 3100#2,#3键盘选择 3102,3190中文显示, 3104#3相对坐标预置, 3105#0实际进给速度显示 3105#2主轴和T代码显示 3106#5主轴位率显示 3108#7实际手动速度显示 3111#0伺服调整画面显示 3111#1主轴监控画面显示 3111#5操作监控画面显示 3112#0伺服波型画面显示,需要时1,最后要 为0。 2016/7/3 1 26 3201,3202,3220,3221,3290程序保护。
2016/7/3
1
4
4
•( 6 ) 若需要则重复步骤( 4 )和 (5),输入其它参数。 •( 7 ) 参数设定完毕。需将参数设 定 画 面 的 “ PARAMETER WRITE = ”设定为0,禁止参数设定。 •(8) 复位CNC,解除P/S报警100。 但在设定参数时,有时会出现P/S报 警000(需切断电源),此时请关掉 电源再开机。
17
17
机床常用参数简介
• 1.1-999:有关通讯、远程诊断、数据服务参数。 如: 0000#1=1程序输出格式为ISO代码 103=10数据传送波特率 20=4 I/O通讯口(用CF卡) 138#7=1用存贮卡DNC
2016/7/3
1
18
18
• 2.1000-1200:轴控制/设定单位的参数。 如:1001.0公/英制; 1002手动、参考点档块; 1005回参考点方式; 1006回参考点方向、旋转轴; 1010CNC控制轴数; 1020各轴名称; 1023各轴伺服轴号。 1320存贮行程限位正极限 1321存贮行程限位负极限
2016/7/3
1
5
5
3.通过阅读机/穿孔机接口输出参数
• (1) 选择EDIT方式,或使系统处于急停状态。 • (2) 按功能键SYSTEM一次或几次后,再按操作 选择软键[PARAM],显示参数画面。 • (3) 按[(OPRT)]软键,显示出操作选择软键后, 按右边的连续菜单软键,显示出包含[PUNCH]的 软键。
• (1) 将NC置于急停状态。 • (2) 使参数处于可写状态。
– 1. 按 功能键一次或多次,再按操作选择软件 [SETTING],显示出参数设定画面。 – OFFSET SETTING 2 . 移 动 光 标 , 将 光 标 置 于 “PARAMETER WRITE”上。 – 3. 按软键[(OPRT)]显示出操作选择软键。 – 4 . 按软键 [NO:1] 或用键输入 1 后,再按输入软键 [INPUT],将“PARMATER WRITE =”设为1。于是, 参数处于可设定状态。同时出现P/S报警100(参数可 写入)。
1
7.
2016/7/3
11
11
伺服设定和调整画面
2016/7/3
1
12
12
2016/7/3
1
13
13
2016/7/3
1
14
14
2016/7/3
1
15
15
3)主轴设定
• 首先地4133#参数中输入电机代码,把4019#7设为1进 行自动初始化。断电再上电后,系统会自动加载部分 电机参数,如果在参数手册上查不到代码,则输入最 相近的代码。 • 初始化后根据主轴电机 参数说明书的参数表对照一下, 有不同的加以修改(没有出现的不用更改)。修改后 主轴初始化结束。 • 设定相关的电机速率(3741,3742,3743等)参数, 在MDI画面输入M03 S100,检查主轴运行是否正常。 (不用串行主轴时,将参数3701#1ISI设为1,屏蔽串 行主轴。3701#4SS2设定为0是不使用第二串行主轴, 否则出现750报警) • 注:若在PMC中MRDY信号没有置1,则参数4001#0 设为0。
2016/7/3 1
21
21
• 6.1601-1799有关轴加减速的参数。 如:1601#2=1切削进给时程序段的速度连接 重叠 1620快速移动时间常数 1622切削移动时间常数 1624JOG移动时间常数
2016/7/3
1
22
22
• 7.1800-3000伺服参数。 如:1815#1全闭环设置,分离型位置检测器 1815#5电机绝对编码器 1825=3000各轴位置环增益 1826=20各轴到位宽度 1828=10000各轴移动位置偏差极限 1829=200各轴停止位置偏差极限 1851反向间隙 1902FSSB设定,(自动设定时:1023, 1905,1910-1919,1936,1937,可在FSSB 画面自动设定;电机驱动参数在SV-RPM画面 设定。)
2016/7/3
1
2
2
2.用 MDI 设定参数
• (1) 将NC置于MDI方式或急停状态。 • (2) 用以下步骤使参数处于可写状态。 1. 按SETTING功能 键一次或多次后,再按软键[SETTING],可显示SETTING画面的 第一页。 2. 将光标移至“PARAMETER WRITE”处。
• ( 7 ) 当参数输入完成时,“ INPUT” 的闪烁停 止。如果想中途停止输入,请按RESET键。 • ( 8 ) 当参数输入完成时,“ INPUT” 的闪烁停 止,会出现 P/S 报警 000 ,此时需要关断电源一 次。
2016/7/3 1
9
9
4。系统调试参数设定
•
• 1. 2. 3.
4.
2016/7/3
1
6
6
• (4) 按[PUNCH]软键,显示变为如下:
• (5) 按[EXEC]软键,开始输出参数。正在 输出参数时,画面下部的状态显示上的 “OUTPUT”闪烁。
• (6) 参数输出停止时,“OUTPUT”的闪烁 会停止。按 RESET键停止参数的输出。
7
通过阅读机/穿孔机 接口输入参数
2016/7/3 1
23
23
• • • • • • • •
2003#3=1P-I控制方式 2003#4单脉冲消除功能,停止时微小震动设1 2009#0虚拟串行反馈功能,不带电机设1 2020电机代码,查表 2021各负载惯量比,200左右 2022各轴电机旋转方向,111或-111 2023各轴速度反馈脉冲数,8192 2024各轴位置反馈脉冲数,半闭环12500;全 闭环(电机一转应走的微米数) • 2084、2085各轴柔性进给传动比
20
20
• 5.1400-1600有关速率参数。 如:1401#0=0从接通电源到返回参考点期间, 手动快速运行无效 1402#1=0JOG倍率有效 1410空运行速度 1420各轴快速速度 1422最大切削进给速度 1423各轴JOG速度 1424各轴手动快速移动速度 1425各轴回参考点FL速度 1430各轴最大切削进给速度。
2016/7/3
1
27
27
• 3621 各轴负方向最远端的螺距误差补偿点的 号码0~1023 • 3622 各轴正方向最远端的螺距误差补偿点的 号码0~1023 • 3623 各轴螺距误差补偿倍率0~1023 • 3624 各轴的螺距误差补偿点的间距
2016/7/3
1
28
28
• 12.3700-4900主轴参数。 如:3701#1=0使用第1、第2主轴串行接口 3701#4=1在串行主轴控制中,使用第2主轴 3708#0=1检查主轴速度到达信号 3730模拟输出调整700~1250 3736最大主轴速度 3741/2/3齿轮换档速度 3770,3771恒线速控制 4002#1=1使用位置编码器 4019#7=1主轴电机参数初始化 4133主轴电机代码
1
2016/7 5. 6.