PIC16F877A与PC机串行通信C语言源程序
最新PIC16F877A单片机中文文献
最新PIC16F877A单片机中文文献PIC16F877A单片机是microchip公司的产品,它采用14位的RISC指令系统,内部集成了A/D转换器、EEPROM、模拟比较器、带比较和捕捉功能的定时器/计数器、PWM输出、异步串行通信电路等。
1.程序存储器程序存储器和堆栈PIC16F877A单片机内部具有8K×14位的Flash程序存储器,程序存储器具有13位宽度的程序计数器地址范围:0000H-1FFFH。
由程序计数器提供13条地址线进行单元选择,每个单元宽14位,即PIC16F877A的指令字节宽度为14位,能够存放一条PIC单片机系统指令。
在系统上电或其他复位情况下,程序计数器均从0000H地址单元开始工作。
如果遇到调用子程序或系统发生事件中断时,将把当前程序断点处的地址送入8级×14位的堆栈区域进行保护。
堆栈是一个独立的存储区域,在调用的子程序或中断服务程序执行完后,再恢复断点地址。
通过14位程序总线,取出对应程序之灵的机器码,送入指令存储器,将组成的操作码和操作数进行有效分离。
如果操作数为地址,则进入地址复用器;如果操作数为数据,则进入数据复用器。
而操作码将在指令译码和控制单元中转化为相应的功能操作。
PIC的多数指令均是顺序执行,即使条件跳转也是隔行间接跳转。
具有大范围转移功能的指令只有两条:无条件GOTO语句和调用子程序CALL语句。
但它们受到2KB范围的约束。
所以必须将整个程序存储器以2KB为单位进行分页。
PIC16F877A单片机的上电复位地址是0000H,中端口地址是0004H,中断产生时PC指针会自动指向该地址。
在进行中断应用时,特别是涉及多个中断同时打开时,必须要逐个对中断标志进行判断。
编程时,在0000H-0003H单元内要放置一条GOTO跳转指令,跳转到主程序,以避开0004H存储器单元。
2.数据存储器数据存储器PIC单片机的数据存储器与传统的MCS-51单片机一样,在配置结构上可分为通用寄存器和特殊功能寄存器两大类。
PIC16F877A功能及其编程
4.1.1 端口A
因此,在使用RA口时,除了要设置TRISA外,有 时相关寄存器也要设置。
注意:在上电复位时,与AN有关的端口的默认 设置是作为模拟端口,即ADCON1(见4.6)中默认 值为0b00xx0000,这个值的设置结果是除RA4外的所 有的RA引脚都作为模拟输入。
信的时钟线; RC7/RX/DT:IO引脚、异步串行通信的接收、同步串行通
信的数据线。
4.1.4 端口D
端口D有8个引脚,它除了作为普通IO口外, 还能作为并行从动口使用。
4.1.5 端口E 端口E只有3个引脚,它们都可以作为AD转换
的模拟电压输入口,功能如下:
RE0/RD/AN5:IO引脚、并行从动口的读控制、 模拟电压输入通道AN5;
➢ 中断的特点:可返回性。中断处理结束后必须能 回到原先的程序,并且能继续运行原先的程序,
这就需要在中断时能进行现场保护与恢复。
中断的执行过程
➢ 中断发生:程序执行到某行,突然事件(能够产 生中断的事件)发生,产生中断。
➢ 断点保护:CPU自动将中断时刻即将要执行的下 一条指令的地址压入堆栈。
➢ 中断响应:CPU自动将PC强制设为0X0004,且GIE =0。执行中断服务程序(自动完成现场保护与恢 复,手动清中断标志位)。
将被调试系统占用,因此在调试时此二个引脚暂 不能使用。
3、8个引脚具有内部弱上拉使能控制 由OPTION_REG寄存器的第7位RBPU控制,如果弱 上拉使能,作为输入的RB口在端口悬空时将被上拉 到高电平。以RB0为例,如下图所示:
4、RB0/INT具有外部中断功能。
5、RB的的高4位还具有电平变化中断功能
ADIE
用C语言写的一个PIC16F877的时闹钟程序

用C语言写的一个PIC16F877的时闹钟程序单片机用16F877,主时钟用20MHz,用32768作定时时间。
可以实现2路定闹,每一路都可分别设置和开关,采用4x4键盘,16x2的字符型LCD显示。
连线在程序开头有说明。
程序的功能:(1)上电后LCD背光打开,并显示倒计时5秒,然后时钟开始工作。
(2)用模式键(*)切换模式,如显示时间、日期、闹钟1、闹钟2等,并且可以用上、下键控制加1、减1或是闹钟的On、Off。
(3)原程序有16个键,包括0~9数字键,可以直接输入要设置的时间值,但后来将数字键取消了,你仍然可以通过修改程序的部分注释恢复此功能。
(4)闹钟有2路,时间到后闹2分钟,可按任意键取消本次闹钟。
闹钟响时有2种音调,是用PIC的PWM实现的。
(5)按任意键可打开背光,1分钟后自动关闭背光。
(6)RA0~RA3为按键扫描输入,应接下拉电阻。
主程序// FileName: Main.c// MCU: Microchip PIC16F877// Tool: CCS-C compiler// Author: KingEDA, MSN:kingeda@, skype:kingeda, E-mail:kingeda@// Website: // Description:// A timer program// Ver 0.1: 2003-03-31, all clock function with date display, 2 way alarm.// Ver 0.2: 2003-05-05, (1) Alarm default is on,modify alarm1 time to 7:00:00,// and alarm2 to 13:30:00.// (2) Backlight will be enabled when alarming.// (3) Automatic adjust day(28,30,31).// (4) Automatic move cursor to next location when set item.// PIN Connection:// RC0~1 : 32768Hz crystal// RC2 : Buzzer// RC3 : LCD Back Light,drive a PNP BJT// RD0~RD7 : to LCD DB0~DB7// RA0~RA3 : keypad col in// RC4~RC7 : keypad line out// 7 8 9 #// 4 5 6 ↑// 1 2 3 ↓// 0 ←→*// RE0 : LCD RS// RE1 : LCD RW// RE2 : LCD E#include "my16f877.h"#device ICD=true//#fuses HS,NOWDT,NOPROTECT,PUT,BROWNOUT #use delay(clock = 24000000)//#use fast_io(C)#use fast_io(E)#define lcd_busy (lcd_read_addr()&0x80) == 0x80#define time_start_addr 0x80+0x04#define time_hourh_addr time_start_addr#define time_hourl_addr time_start_addr+1#define time_minuteh_addr time_start_addr+3#define time_minutel_addr time_start_addr+4#define time_secondh_addr time_start_addr+6#define time_secondl_addr time_start_addr+7#define key_0 0x11#define key_1 0x21#define key_2 0x22#define key_3 0x24#define key_4 0x41#define key_5 0x42#define key_6 0x44#define key_7 0x81#define key_8 0x82#define key_9 0x84#define key_left 0x12#define key_right 0x14#define key_up 0x48#define key_down 0x28#define key_mode 0x18#define key_cancel 0x88char StrPower1[] = " * Power on * ";char StrSetTime[] = " * Adjust time* ";char StrSetDate[] = " * Adjust date* ";char StrAlarm1[] = " * Set alarm 1* ";char StrAlarm2[] = " * Set alarm 2* ";unsigned char PORTC_MAP;#bit BackLightEn = PORTC_MAP.3unsigned char BackLightTimer;int1 led;#bit lcd_rs = PORTE.0#bit lcd_rw = PORTE.1#bit lcd_e = PORTE.2#byte lcd_bus = PORTD#byte lcd_dir = TRISD#define PWM_on 0x0c#define PWM_off 0x00#define PWM_period 200#define PWM_DC 100unsigned char lcd_addr;unsigned char KeyLine;unsigned char KeyOld;unsigned char KeyNew;struct mTime {unsigned char hourh; // hour,0~23unsigned char hourl;unsigned char minuteh; // minute,0~59unsigned char minutel;unsigned char secondh; // second,0~59unsigned char secondl;};struct mTime CurrentTime = {1,2,0,0,0,0};struct mTime AlarmTime1 = {0,7,0,0,0,0}; // 07:00:00 struct mTime AlarmTime2 = {1,3,3,0,0,0}; // 13:30:00 unsigned char AlarmStatus;#bit Alarm1Enable = AlarmStatus.0#bit Alarm2Enable = AlarmStatus.1#bit Alarm1Alarm = AlarmStatus.2#bit Alarm2Alarm = AlarmStatus.3unsigned char Alarm1Cnt; // alarm1 second count unsigned char Alarm2Cnt;unsigned char CurrentMode;#define mode_time 0#define mode_set_time 1#define mode_set_date 2#define mode_set_alarm1 3#define mode_set_alarm2 4unsigned char adjust_item;struct mDate {unsigned char year1; //unsigned char year2;unsigned char year3;unsigned char year4;unsigned char monthh;unsigned char monthl;unsigned char dayh;unsigned char dayl;};struct mDate CurrentDate = {2,0,0,3,0,1,0,1}; unsigned char *pStr;// ------------------------------------------------------- unsigned char lcd_read_addr(){unsigned char ch;lcd_dir = 0xff; // read from lcdlcd_rs = 0;lcd_rw = 1; // instlcd_e = 1;#asmnopnopnop#endasmch = lcd_bus;lcd_e = 0;lcd_dir = 0x00; // set write to lcdreturn ch;}// ------------------------------------------------------- unsigned char lcd_write_data(unsigned char ch) {while (lcd_busy){ restart_wdt(); }lcd_rs = 1; // datalcd_rw = 0; // writelcd_bus = ch; // write outlcd_e = 1;#asmnopnopnop#endasmlcd_e = 0;return 'Y';}// ------------------------------------------------------- unsigned char lcd_write_inst(unsigned char ch) {while (lcd_busy){ restart_wdt(); }lcd_rs = 0; // instlcd_rw = 0; // writelcd_bus = ch;lcd_e = 1;#asmnopnopnop#endasmlcd_e = 0;return 'Y';}// ------------------------------------------------------- unsigned char lcd_read_data(){unsigned char ch;while (lcd_busy){ restart_wdt(); }lcd_dir = 0xff; // read from lcdlcd_rs = 1; // datalcd_rw = 1; // readlcd_e = 1;#asmnopnopnop#endasmch = lcd_bus; // read inlcd_e = 0;lcd_dir = 0x00; // set write to lcdreturn ch;}// ------------------------------------------------------- void lcd_init(){unsigned char Tempch;lcd_addr = 0;delay_ms(100);Tempch = 0x38; // 1-line mode,5x8 dotslcd_write_inst(Tempch); // Function setTempch = 0x0f; // lcd on,cursor on,blink onlcd_write_inst(Tempch); // Display on/offTempch = 0x06; // Increment mode,Entire shift offlcd_write_inst(Tempch);Tempch = 0x01; // clear displaylcd_write_inst(Tempch);delay_ms(3);}// -------------------------------------------------------//#int_timer1//void timer1_interrupt(void)#int_ccp2void ccp2_interrupt(void){//TMR1H = 0x80;if (CurrentTime.secondl==9){CurrentTime.secondl=0;if (CurrentTime.secondh==5){CurrentTime.secondh=0;if (CurrentTime.minutel==9){CurrentTime.minutel=0;if (CurrentTime.minuteh==5){CurrentTime.minuteh=0;if (CurrentTime.hourl==9){CurrentTime.hourl=0;CurrentTime.hourh++;}else if((CurrentTime.hourl==3) && (CurrentTime.hourh==2)){CurrentTime.hourl=0;CurrentTime.hourh=0;if ((((CurrentDate.dayl == 8) || (CurrentDate.dayl == 9)) && (CurrentDate.dayh == 2) && (CurrentDate.monthl == 2) && (CurrentDate.monthh == 0)) ||((CurrentDate.dayl == 0) && (CurrentDate.dayh == 3) && ((((CurrentDate.monthl == 4) || (CurrentDate.monthl == 6)|| (CurrentDate.monthl == 9)) && (CurrentDate.monthh == 0)) || ((CurrentDate.monthl == 1) && (CurrentDate.monthh == 1)))) ||((CurrentDate.dayl == 1) && (CurrentDate.dayh == 3))){CurrentDate.dayl=1;CurrentDate.dayh=0;if ((CurrentDate.monthl == 2) && (CurrentDate.monthh == 1)){CurrentDate.monthl = 1;CurrentDate.monthh = 0;if (CurrentDate.year4 == 9){CurrentDate.year4 = 0;if (CurrentDate.year3 == 9){CurrentDate.year3 = 0;if (CurrentDate.year2 == 9){CurrentDate.year2 = 0;CurrentDate.year1++;}elseCurrentDate.year2++;}elseCurrentDate.year3++;}elseCurrentDate.year4++;}else if(CurrentDate.monthl == 9){CurrentDate.monthl = 0;CurrentDate.monthh++;}elseCurrentDate.monthl++;}else if(CurrentDate.dayl == 9){CurrentDate.dayl=0;CurrentDate.dayh++;}elseCurrentDate.dayl++;}elseCurrentTime.hourl++;}elseCurrentTime.minuteh++;}elseCurrentTime.minutel++;}elseCurrentTime.secondh++;}elseCurrentTime.secondl++;if ((Alarm1Alarm == false) & (Alarm2Alarm == false)){led = 0;CCP1CON = PWM_off;}else{if (led == 1){led = 0;PR2 = PWM_period; // set pwm periodCCPR1L = PWM_DC; // set pwm duty cycle//CCP1CON = PWM_on;}else{led = 1;PR2 = PWM_period/2; // set pwm periodCCPR1L = PWM_DC/2; // set pwm duty cycle//CCP1CON = PWM_off;}}Alarm1Cnt++;Alarm2Cnt++;if (BackLightEn == 0)if (((BackLightTimer++)>=60) & (Alarm1Alarm == false) & (Alarm1Alarm == false))BackLightEn = 1; // disable backlight PORTC = PORTC_MAP;//TMR1IF = 0;//PIR1 = PIR2 = 0x00;CCP2IF = 0;}// ------------------------------------------------------- unsigned char get_key(void){unsigned char key_in,tmp;TRISC = 0x03;KeyLine = 0xf0;PORTC = KeyLine | PORTC_MAP;#asmnopnopnop#endasmif ((PORTA & 0x0f) != 0){tmp = 0x10;for (KeyLine = tmp;KeyLine!=0;KeyLine = tmp){PORTC = KeyLine | PORTC_MAP;tmp = KeyLine <<1;#asmnopnopnop#endasmkey_in = PORTA & 0x0f;if (key_in != 0){return (key_in | KeyLine);}}return 0;}elsereturn 0;}// -------------------------------------------------------void set_mode(void){if (CurrentMode == mode_set_alarm2)CurrentMode = mode_time;else{CurrentMode++;adjust_item = 0;}lcd_write_inst(0x01); // clear LCD displaylcd_write_inst(time_start_addr); // set LCD line1 if (CurrentMode == mode_set_time){lcd_write_data(CurrentTime.hourh + '0');lcd_write_data(CurrentTime.hourl + '0');lcd_write_data(':');lcd_write_data(CurrentTime.minuteh + '0');lcd_write_data(CurrentTime.minutel + '0');lcd_write_data(':');lcd_write_data(CurrentTime.secondh + '0');lcd_write_data(CurrentTime.secondl + '0');pStr = StrSetTime;}else if(CurrentMode == mode_set_date){lcd_write_data(CurrentDate.year1 + '0');lcd_write_data(CurrentDate.year2 + '0');lcd_write_data(CurrentDate.year3 + '0');lcd_write_data(CurrentDate.year4 + '0');lcd_write_data('/');lcd_write_data(CurrentDate.monthh + '0');lcd_write_data(CurrentDate.monthl + '0');lcd_write_data('/');lcd_write_data(CurrentDate.dayh + '0');lcd_write_data(CurrentDate.dayl + '0');pStr = StrSetDate;}else if(CurrentMode == mode_set_alarm1){lcd_write_data(AlarmTime1.hourh + '0');lcd_write_data(AlarmTime1.hourl + '0');lcd_write_data(':');lcd_write_data(AlarmTime1.minuteh + '0');lcd_write_data(AlarmTime1.minutel + '0');lcd_write_data(':');lcd_write_data(AlarmTime1.secondh + '0');lcd_write_data(AlarmTime1.secondl + '0');lcd_write_data(' ');lcd_write_data('O');if (Alarm1Enable){lcd_write_data('n');}else{lcd_write_data('f');lcd_write_data('f');}pStr = StrAlarm1;Alarm1Cnt =0;}else if(CurrentMode == mode_set_alarm2) {lcd_write_data(AlarmTime2.hourh + '0');lcd_write_data(AlarmTime2.hourl + '0');lcd_write_data(':');lcd_write_data(AlarmTime2.minuteh + '0');lcd_write_data(AlarmTime2.minutel + '0');lcd_write_data(':');lcd_write_data(AlarmTime2.secondh + '0');lcd_write_data(AlarmTime2.secondl + '0');lcd_write_data(' ');lcd_write_data('O');if (Alarm2Enable){lcd_write_data('n');}else{lcd_write_data('f');lcd_write_data('f');}pStr = StrAlarm2;Alarm2Cnt = 0;}lcd_write_inst(0xc0); // set LCD line2 if (CurrentMode != mode_time){for (;*pStr!=0;pStr++){ // write hint messagelcd_write_data(*pStr);}lcd_write_inst(0x0f); // LCD cursor onlcd_write_inst(time_start_addr); // move cursor to start }else // time mode,write date to second line{lcd_write_inst(0x0c); // LCD sursor off/* lcd_write_inst(0xc0 + 3); // set date start address lcd_write_data(CurrentDate.year1 + '0');lcd_write_data(CurrentDate.year2 + '0');lcd_write_data(CurrentDate.year3 + '0');lcd_write_data(CurrentDate.year4 + '0');lcd_write_data('/');lcd_write_data(CurrentDate.monthh + '0');lcd_write_data(CurrentDate.monthl + '0');lcd_write_data('/');lcd_write_data(CurrentDate.dayh + '0');lcd_write_data(CurrentDate.dayl + '0');*/ }if (CurrentMode == mode_set_time){lcd_write_inst(time_start_addr); // move cursor to start }else if (CurrentMode == mode_set_date){lcd_write_inst(time_start_addr); // move cursor to start }else if (CurrentMode == mode_set_alarm1){lcd_write_inst(time_secondl_addr+3);adjust_item = 6;}else if (CurrentMode == mode_set_alarm2){lcd_write_inst(time_secondl_addr+3);adjust_item = 6;}else{lcd_write_inst(0x0c); // LCD cursor off}}// ------------------------------------------------------- void set_date(void){if (adjust_item == 0) // adjust year{if ((KeyNew >=0) & (KeyNew <= 9)){CurrentDate.year1 = KeyNew;lcd_write_data(CurrentDate.year1 + '0');//lcd_write_inst(time_start_addr);adjust_item ++;}else if (KeyNew == key_left){adjust_item = 7;lcd_write_inst(time_start_addr + 9);}else if(KeyNew == key_right){adjust_item ++;lcd_write_inst(time_start_addr + 1);}}else if(adjust_item == 1){if ((KeyNew >=0) & (KeyNew <= 9)){CurrentDate.year2 = KeyNew;lcd_write_data(CurrentDate.year2 + '0');//lcd_write_inst(time_start_addr + 1);adjust_item ++;}else if (KeyNew == key_left){adjust_item --;lcd_write_inst(time_start_addr + 0);}else if(KeyNew == key_right){adjust_item ++;lcd_write_inst(time_start_addr + 2);}}else if(adjust_item == 2){if ((KeyNew >=0) & (KeyNew <= 9)){CurrentDate.year3 = KeyNew;lcd_write_data(CurrentDate.year3 + '0');//lcd_write_inst(time_start_addr + 2);adjust_item ++;}else if (KeyNew == key_left){adjust_item --;lcd_write_inst(time_start_addr + 1);}else if(KeyNew == key_right){adjust_item ++;lcd_write_inst(time_start_addr + 3);}}else if(adjust_item == 3){if ((KeyNew >=0) & (KeyNew <= 9)){CurrentDate.year4 = KeyNew;lcd_write_data(CurrentDate.year4 + '0');//lcd_write_inst(time_start_addr + 3);adjust_item ++;lcd_write_inst(time_start_addr + 5);}else if (KeyNew == key_left){adjust_item --;lcd_write_inst(time_start_addr + 2);}else if(KeyNew == key_right){adjust_item ++;lcd_write_inst(time_start_addr + 5);}}else if(adjust_item == 4)if (((CurrentDate.monthl>2) & (KeyNew == 0)) | ((CurrentDate.monthl == 0) & (KeyNew == 1))| (((CurrentDate.monthl == 1) | (CurrentDate.monthl == 2)) & (KeyNew <2))) {CurrentDate.monthh = KeyNew;lcd_write_data(CurrentDate.monthh + '0');//lcd_write_inst(time_start_addr + 5);adjust_item ++;}else if (KeyNew == key_left){adjust_item --;lcd_write_inst(time_start_addr + 3);}else if (KeyNew == key_right){adjust_item ++;lcd_write_inst(time_start_addr + 6);}}else if(adjust_item == 5){if (((CurrentDate.monthh == 3) & (KeyNew <2)) | ((CurrentDate.monthh != 3) & (KeyNew >=0) & (KeyNew <=9))){CurrentDate.monthl = KeyNew;lcd_write_data(CurrentDate.monthl + '0');//lcd_write_inst(time_start_addr + 6);adjust_item ++;lcd_write_inst(time_start_addr + 8);}else if (KeyNew == key_left){adjust_item --;lcd_write_inst(time_start_addr + 5);}else if (KeyNew == key_right){adjust_item ++;lcd_write_inst(time_start_addr + 8);}}else if(adjust_item == 6)if (((CurrentDate.dayl>1) & ((KeyNew == 1) | (KeyNew == 2))) | ((CurrentDate.dayl == 0) & (KeyNew >0) & (KeyNew<4))| ((CurrentDate.dayl == 1) & (KeyNew <4))){CurrentDate.dayh = KeyNew;lcd_write_data(CurrentDate.dayh + '0');//lcd_write_inst(time_start_addr + 8);adjust_item ++;}else if (KeyNew == key_left){adjust_item --;lcd_write_inst(time_start_addr + 6);}else if (KeyNew == key_right){adjust_item ++;lcd_write_inst(time_start_addr + 9);}}else if(adjust_item == 7){if (((CurrentDate.dayh == 3) & (KeyNew <2)) | ((CurrentDate.dayh != 3) & (KeyNew >=0) & (KeyNew <=9))){CurrentDate.dayl = KeyNew;lcd_write_data(CurrentDate.dayl + '0');//lcd_write_inst(time_start_addr + 9);adjust_item ++;lcd_write_inst(time_start_addr + 0);}else if (KeyNew == key_left){adjust_item --;lcd_write_inst(time_start_addr + 8);}else if (KeyNew == key_right){adjust_item = 0;lcd_write_inst(time_start_addr + 0);}}}// -------------------------------------------------------void set_time(void){if (adjust_item == 0) // set hourh{if (((CurrentTime.hourl <4) & (KeyNew < 3)) | ((CurrentTime.hourl >3) & (KeyNew <2))){CurrentTime.hourh = KeyNew;lcd_write_data(CurrentTime.hourh + '0'); // refresh hourh//lcd_write_inst(0x10); // move cursor backadjust_item ++;}else if(KeyNew == key_left){adjust_item = 5;lcd_write_inst(time_secondl_addr);}else if(KeyNew == key_right){adjust_item ++;lcd_write_inst(time_hourl_addr);}}else if (adjust_item == 1) // set hourl{if (((CurrentTime.hourh == 2) & (KeyNew < 4)) | ((CurrentTime.hourh < 2) & (KeyNew <=9))){CurrentTime.hourl = KeyNew;lcd_write_data(CurrentTime.hourl + '0'); // refresh hourl//lcd_write_inst(0x10); // move cursor backadjust_item ++;lcd_write_inst(time_minuteh_addr);}else if(KeyNew == key_left){adjust_item --;lcd_write_inst(time_hourh_addr);}else if(KeyNew == key_right){adjust_item ++;lcd_write_inst(time_minuteh_addr);}}else if (adjust_item == 2) // set minuteh{if (KeyNew <6){CurrentTime.minuteh = KeyNew;lcd_write_data(CurrentTime.minuteh + '0');//lcd_write_inst(0x10); // move cursor backadjust_item ++;}else if(KeyNew == key_left){adjust_item --;lcd_write_inst(time_hourl_addr);}else if(KeyNew == key_right){adjust_item ++;lcd_write_inst(time_minutel_addr);}}else if (adjust_item == 3) // set minutel{if ((KeyNew >=0) & (KeyNew <=9)){CurrentTime.minutel = KeyNew;lcd_write_data(CurrentTime.minutel + '0');//lcd_write_inst(0x10); // move cursor backadjust_item ++;lcd_write_inst(time_secondh_addr);}else if(KeyNew == key_left){adjust_item --;lcd_write_inst(time_minuteh_addr);}else if(KeyNew == key_right){adjust_item ++;lcd_write_inst(time_secondh_addr);}}else if (adjust_item == 4) // set secondh{if (KeyNew <6){CurrentTime.secondh = KeyNew;lcd_write_data(CurrentTime.secondh + '0');//lcd_write_inst(0x10); // move cursor backadjust_item ++;}else if(KeyNew == key_left){adjust_item --;&nb, sp; lcd_write_inst(time_minutel_addr);}else if(KeyNew == key_right){adjust_item ++;lcd_write_inst(time_secondl_addr);}}else if (adjust_item == 5) // set secondl{if ((KeyNew >=0) & (KeyNew <=9)){CurrentTime.secondl = KeyNew;lcd_write_data(CurrentTime.secondl + '0');//lcd_write_inst(0x10); // move cursor backadjust_item = 0;lcd_write_inst(time_hourh_addr);}else if(KeyNew == key_left){adjust_item --;lcd_write_inst(time_secondh_addr);}else if(KeyNew == key_right){adjust_item = 0;lcd_write_inst(time_hourh_addr);}}}// -------------------------------------------------------void set_alarm1(void){if (adjust_item == 0) // set hourh{if (((AlarmTime1.hourl <4) & (KeyNew < 3)) | ((AlarmTime1.hourl >3) & (KeyNew <2))){AlarmTime1.hourh = KeyNew;lcd_write_data(AlarmTime1.hourh + '0'); // refresh hourh//lcd_write_inst(0x10); // move cursor backadjust_item ++;}else if(KeyNew == key_left){adjust_item = 6;lcd_write_inst(time_secondl_addr + 3);}else if(KeyNew == key_right){adjust_item ++;lcd_write_inst(time_hourl_addr);}}else if (adjust_item == 1) // set hourl{if (((AlarmTime1.hourh == 2) & (KeyNew < 4)) | ((AlarmTime1.hourh < 2) & (KeyNew <=9))){AlarmTime1.hourl = KeyNew;lcd_write_data(AlarmTime1.hourl + '0'); // refresh hourl//lcd_write_inst(0x10); // move cursor backadjust_item ++;lcd_write_inst(time_minuteh_addr);}else if(KeyNew == key_left){adjust_item --;lcd_write_inst(time_hourh_addr);}else if(KeyNew == key_right){adjust_item ++;lcd_write_inst(time_minuteh_addr);}}else if (adjust_item == 2) // set minuteh{if (KeyNew <6){AlarmTime1.minuteh = KeyNew;lcd_write_data(AlarmTime1.minuteh + '0');//lcd_write_inst(0x10); // move cursor backadjust_item ++;}else if(KeyNew == key_left){adjust_item --;lcd_write_inst(time_hourl_addr);}else if(KeyNew == key_right){adjust_item ++;lcd_write_inst(time_minutel_addr);}}else if (adjust_item == 3) // set minutel{if ((KeyNew >=0) & (KeyNew <=9)){AlarmTime1.minutel = KeyNew;lcd_write_data(AlarmTime1.minutel + '0');//lcd_write_inst(0x10); // move cursor backadjust_item ++;lcd_write_inst(time_secondh_addr);}else if(KeyNew == key_left){adjust_item --;lcd_write_inst(time_minuteh_addr);}else if(KeyNew == key_right){adjust_item ++;lcd_write_inst(time_secondh_addr);}}else if (adjust_item == 4) // set secondh{if (KeyNew <6){AlarmTime1.secondh = KeyNew;lcd_write_data(AlarmTime1.secondh + '0');//lcd_write_inst(0x10); // move cursor backadjust_item ++;}else if(KeyNew == key_left){adjust_item --;lcd_write_inst(time_minutel_addr);}else if(KeyNew == key_right){adjust_item ++;lcd_write_inst(time_secondl_addr);}}else if (adjust_item == 5) // set secondl{if ((KeyNew >=0) & (KeyNew <=9)){AlarmTime1.secondl = KeyNew;lcd_write_data(AlarmTime1.secondl + '0');//lcd_write_inst(0x10); // move cursor backadjust_item ++;lcd_write_inst(time_secondl_addr+3);}else if(KeyNew == key_left){adjust_item --;lcd_write_inst(time_secondh_addr);}else if(KeyNew == key_right){adjust_item ++;lcd_write_inst(time_secondl_addr+3);}}else if (adjust_item == 6) // set on/off{if ((KeyNew == key_up) | (KeyNew == key_down)){if (Alarm1Enable){Alarm1Enable =false; // disable alarm1lcd_write_data('f');lcd_write_data('f');}else{Alarm1Enable =true; // enable alarm1lcd_write_data('n');lcd_write_data(' ');}//lcd_write_inst(time_secondl_addr+3);adjust_item = 0;lcd_write_inst(time_hourh_addr);Alarm1Cnt = 0;}else if(KeyNew == key_left){adjust_item --;lcd_write_inst(time_secondl_addr);}else if(KeyNew == key_right){adjust_item = 0;lcd_write_inst(time_hourh_addr);}}}// -------------------------------------------------------void set_alarm2(void){if (adjust_item == 0) // set hourh{if (((AlarmTime2.hourl <4) & (KeyNew < 3)) | ((AlarmTime2.hourl >3) & (KeyNew <2))){AlarmTime2.hourh = KeyNew;lcd_write_data(AlarmTime2.hourh + '0'); // refresh hourh//lcd_write_inst(0x10); // move cursor backadjust_item ++;}else if(KeyNew == key_left){adjust_item = 6;lcd_write_inst(time_secondl_addr+3);}else if(KeyNew == key_right){adjust_item ++;lcd_write_inst(time_hourl_addr);}}else if (adjust_item == 1) // set hourl{if (((AlarmTime2.hourh == 2) & (KeyNew < 4)) | ((AlarmTime2.hourh < 2) & (KeyNew <=9))){AlarmTime2.hourl = KeyNew;lcd_write_data(AlarmTime2.hourl + '0'); // refresh hourl//lcd_write_inst(0x10); // move cursor backadjust_item ++;lcd_write_inst(time_minuteh_addr);}else if(KeyNew == key_left){adjust_item --;lcd_write_inst(time_hourh_addr);}else if(KeyNew == key_right){adjust_item ++;lcd_write_inst(time_minuteh_addr);}}else if (adjust_item == 2) // set minuteh{if (KeyNew <6){AlarmTime2.minuteh = KeyNew;lcd_write_data(AlarmTime2.minuteh + '0');//lcd_write_inst(0x10); // move cursor backadjust_item ++;}else if(KeyNew == key_left){adjust_item --;lcd_write_inst(time_hourl_addr);}else if(KeyNew == key_right){adjust_item ++;lcd_write_inst(time_minutel_addr);}}else if (adjust_item == 3) // set minutel{if ((KeyNew >=0) & (KeyNew <=9)){AlarmTime2.minutel = KeyNew;lcd_write_data(AlarmTime2.minutel + '0');//lcd_write_inst(0x10); // move cursor backadjust_item ++;lcd_write_inst(time_secondh_addr);}else if(KeyNew == key_left){adjust_item --;lcd_write_inst(time_minuteh_addr);}else if(KeyNew == key_right){adjust_item ++;lcd_write_inst(time_secondh_addr);}}else if (adjust_item == 4) // set secondh{if (KeyNew <6){AlarmTime2.secondh = KeyNew;lcd_write_data(AlarmTime2.secondh + '0');//lcd_write_inst(0x10); // move cursor backadjust_item ++;}else if(KeyNew == key_left){adjust_item --;lcd_write_inst(time_minutel_addr);}else if(KeyNew == key_right){adjust_item ++;lcd_write_inst(time_secondl_addr);}}else if (adjust_item == 5) // set secondl{if ((KeyNew >=0) & (KeyNew <=9)){AlarmTime2.secondl = KeyNew;lcd_write_data(AlarmTime2.secondl + '0');//lcd_write_inst(0x10); // move cursor backadjust_item ++;lcd_write_inst(time_secondl_addr+3);}else if(KeyNew == key_left){adjust_item --;lcd_write_inst(time_secondh_addr);}else if(KeyNew == key_right){adjust_item ++;lcd_write_inst(time_secondl_addr+3);}}else if (adjust_item == 6) // set on/off{if ((KeyNew == key_up) | (KeyNew == key_down)){if (Alarm2Enable){Alarm2Enable =false; // disable alarm2lcd_write_data('f');lcd_write_data('f');}else{Alarm2Enable =true; // enable alarm2lcd_write_data('n');lcd_write_data(' ');}//lcd_write_inst(time_secondl_addr+3);adjust_item = 0;lcd_write_inst(time_hourh_addr);Alarm2Cnt = 0;}else if(KeyNew == key_left){adjust_item --;lcd_write_inst(time_secondl_addr);}else if(KeyNew == key_right){adjust_item = 0;lcd_write_inst(time_hourh_addr);}}}// -------------------------------------------------------void main(void){unsigned char cnt;TRISC = 0x03; // PORTC.3 drive led,low activePORTC_MAP = 0x00;led = 0;BackLightEn = 0;BackLightTimer = 0;PORTC = PORTC_MAP;TRISA = 0xff; // low half byte as keyscan inTRISE = 0x00;ADCON0 = 0x00;ADCON1 = 0x06; // all digital I/Oslcd_init();INTCON = 0x00;lcd_write_inst(0x80); // set lcd ddram addressfor (pStr = StrPower1;*pStr!=0;pStr++){lcd_write_data(*pStr);}lcd_write_inst(0x0c); // LCD cursor offPIR1 = PIR2 = 0x00;T1CON = 0x0f; // T1CON: -- T1CKPS1 T1CPS0 T1OSCEN /T1SYNC TMR1CS TMR1ONTMR1H = 0x80;TMR1L = 0x00;。
pic16f877a编程实例

pic16f877a编程实例pic16f877a是一款常用的单片机,被广泛应用于嵌入式系统中。
它具有多种功能和强大的性能,可以实现各种应用需求。
本文将以pic16f877a编程实例为主题,介绍其基本特性和常见应用。
pic16f877a是一款8位单片机,采用哈佛架构,具有高性能和低功耗的特点。
它内置了8KB的程序存储器,368字节的数据存储器,以及35个I/O引脚,可以满足大多数嵌入式系统的需求。
我们来看一个简单的实例,通过pic16f877a控制LED灯的开关。
```c#include <pic16f877a.h>void main() {TRISB0 = 0; // 设置RB0为输出引脚while(1) {RB0 = 1; // 将RB0引脚电平设置为高,LED灯亮__delay_ms(1000); // 延时1秒RB0 = 0; // 将RB0引脚电平设置为低,LED灯灭__delay_ms(1000); // 延时1秒}}```在上面的程序中,我们首先将RB0引脚设置为输出引脚,然后进入一个无限循环。
在循环中,我们将RB0引脚电平设置为高,LED灯亮起,然后延时1秒;然后将RB0引脚电平设置为低,LED灯熄灭,再次延时1秒。
通过不断重复这个过程,我们可以实现LED灯的闪烁效果。
除了控制LED灯,pic16f877a还可以用来控制其他外设,如蜂鸣器、液晶显示屏等。
下面是一个使用pic16f877a控制蜂鸣器的实例。
```c#include <pic16f877a.h>void main() {TRISB0 = 0; // 设置RB0为输出引脚while(1) {RB0 = 1; // 将RB0引脚电平设置为高,蜂鸣器鸣叫__delay_ms(1000); // 延时1秒RB0 = 0; // 将RB0引脚电平设置为低,蜂鸣器停止鸣叫__delay_ms(1000); // 延时1秒}}```在上面的程序中,我们同样将RB0引脚设置为输出引脚,并进入一个无限循环。
PIC16f877中文资料1
PIC16F877原理简介1.1 PIC16F877特性:PIC16F877是由Microchip公司所生产开发的新产品,属于PICmicro系列单片微机,具有Flash program程序内存功能,可以重复烧录程序,适合教学、开发新产品等用途;而其内建ICD(In Circuit Debug)功能,可以让使用者直接在单片机电路或产品上,进行如暂停微处理器执行、观看缓存器内容等,让使用者能快速地进行程序除错与开发。
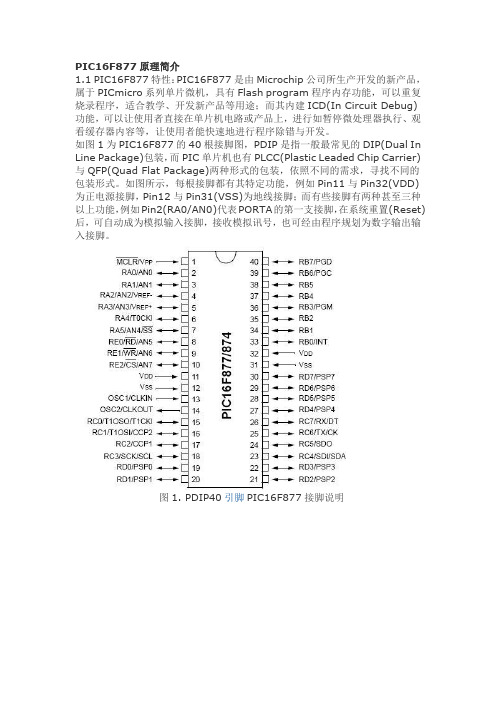
如图1为PIC16F877的40根接脚图,PDIP是指一般最常见的DIP(Dual In Line Package)包装,而PIC单片机也有PLCC(Plastic Leaded Chip Carrier)与QFP(Quad Flat Package)两种形式的包装,依照不同的需求,寻找不同的包装形式。
如图所示,每根接脚都有其特定功能,例如Pin11与Pin32(VDD)为正电源接脚,Pin12与Pin31(VSS)为地线接脚;而有些接脚有两种甚至三种以上功能,例如Pin2(RA0/AN0)代表PORTA的第一支接脚,在系统重置(Reset)后,可自动成为模拟输入接脚,接收模拟讯号,也可经由程序规划为数字输出输入接脚。
图1. PDIP40引脚PIC16F877接脚说明图2. PDIP28和SOIC28引脚PIC16F877接脚图说明图3. PLCC44引脚PIC16F877脚位图说明图4. QFP44引脚PIC16F877引脚图说明PIC16F877属于闪控式(Flash)单片机,可以重复烧录,其ROM的容量总共是8K words,以2K为一个page,区分为4个pages;内部RAM总共有512个字节(00f~1FFh),以128个字节为一个Bank,共区分为4个Bank,如图5所示,每个Bank的前半段都有其特殊用途,分别连接到其特殊功能模块,例如I/O、CCP、Timer、USART、MSSP等。
PIC196F877A串口通信程序
PIC196F877A串口通信程序今天上午完成PIC16F877A 与上位机的串口通信程序!注意:使用MPLAB IDE C 语言编程时,自定义头文件要使用”“包含不能使用串口与单片机的连线原理图串口通信头文件#ifndef T232_H#define T232_H#include “main.h”//定义一帧的开始和结束#define FRAME_BEGIN 0x28//开始帧标志#define FRAME_END 0x29//结束帧标志void init_232() ;void send_str(const char *str) ;char get_char() ;void get_string(char *temp) ;void put_char(char temp) ;#endif串行通信子程序//基于TPDEM1,通过串口调试助手等串口观察软件观察程序,//将TPDEM1通过ICD2 配送的串口延长线与PC 的串口连接,设置PC 的串口为默认设置,如波特率9600,数据位8,无校验位,使用FIFO#include “t232.h”/**Function:init seriel port*/void init_232(){ INTCON=0; TRISC7=1; //RX 置输入TRISC6=0; //TX 清成输出RCSTA=0x90;//连续接受多位数据TXSTA=0x24; SPBRG=25; //9600=4000000/(16*(X+1))->X=25,high speed mode// INTCON=0xC0;//开GIE,外围中断PEIE //RCIE=1; //开接收中断}/**Fuction:send const string to seriel port/void send_str(const char *p){while((*p)!=/0){put_char(*p++) ;}}/Function:get charactor from serial port*/char get_char(){char temp ;while(!RCIF) ; /* set when register is not empty */temp = RCREG ; return RCREG; /* RXD9 and FERR are gone now */}。
PIC单片机串口通讯程序
BSF RCSTA,CREN ;接收允许 BSF STATUS,RP0 BSF TXSTA,TXEN ;发送允许 BCF STATUS,RP0 WAIT BTFSS PIR1,RCIF ;等待接收数据 GOTO WAIT MOVF RCREG,0 ;读取数据 MOVWF INDF ;将接收到的响应字节存入 PIC2 的 RAM INCF FSR MOVWF TXREG ;发送响应字节 LOOPTX BTFSS PIR1,TXIF ;等待写入完成 GOTO LOOPTX BTFSS FSR,7 ;全部数据接收否? GOTO WAIT1 ;没有,继续接收其它数据 BCF RCSTA,RCEN ;接收完,则关断接收和发送数据允许 BSF STATUS,RP0 BCF PIE1,TXEN BCF STATUS,RP0 CALL LED ;调用显示子程序,将接受到的数据显示出来 END ;程序完
2. 单片机 PIC2 编程(接收部分)
LIST P=16F876 #INCLUDE P16F876.INC CBLOCK 0X24 COUNT ENDC ORG 0X0000 NOP START GOTO MAIN MAIN BSF STATUS,RP0 ;初始化程序同发送子程序 MOVLW 0X19 ;波特率设置与 PIC1 相同 MOVWF SPBRG MOVLW 0X04 ;异步高速传输 MOVWF TXSTA BCF STATUS,RP0 MOVLW 0X80 ;串行口工作使能 MOVWF RCSTA BSF STATUS,RP0 BSF TRISC,7 ;与外接电路隔离 BSF TRISC,6 BCF STATUS,RP0 MOVLW 0X30 ;从 30H 单元开始存放发送来的数据 MOVWF FSR
PIC16F877A单片机中文文献
PIC16F877A单片机是microchip公司的产品,它采用14位的RISC指令系统,内部集成了A/D转换器、EEPROM、模拟比较器、带比较和捕捉功能的定时器/计数器、PWM输出、异步串行通信电路等。
1.程序存储器程序存储器和堆栈PIC16F877A单片机内部具有8K×14位的Flash程序存储器,程序存储器具有13位宽度的程序计数器地址范围:0000H-1FFFH。
由程序计数器提供13条地址线进行单元选择,每个单元宽14位,即PIC16F877A的指令字节宽度为14位,能够存放一条PIC单片机系统指令。
在系统上电或其他复位情况下,程序计数器均从0000H地址单元开始工作。
如果遇到调用子程序或系统发生事件中断时,将把当前程序断点处的地址送入8级×14位的堆栈区域进行保护。
堆栈是一个独立的存储区域,在调用的子程序或中断服务程序执行完后,再恢复断点地址。
通过14位程序总线,取出对应程序之灵的机器码,送入指令存储器,将组成的操作码和操作数进行有效分离。
如果操作数为地址,则进入地址复用器;如果操作数为数据,则进入数据复用器。
而操作码将在指令译码和控制单元中转化为相应的功能操作。
PIC的多数指令均是顺序执行,即使条件跳转也是隔行间接跳转。
具有大范围转移功能的指令只有两条:无条件GOTO语句和调用子程序CALL语句。
但它们受到2KB范围的约束。
所以必须将整个程序存储器以2KB为单位进行分页。
PIC16F877A单片机的上电复位地址是0000H,中端口地址是0004H,中断产生时PC指针会自动指向该地址。
在进行中断应用时,特别是涉及多个中断同时打开时,必须要逐个对中断标志进行判断。
编程时,在0000H-0003H单元内要放置一条GOTO跳转指令,跳转到主程序,以避开0004H存储器单元。
2.数据存储器数据存储器PIC单片机的数据存储器与传统的MCS-51单片机一样,在配置结构上可分为通用寄存器和特殊功能寄存器两大类。
PIC单片机串口通讯程序
BSF RCSTA,CREN ;接收允许 BSF STATUS,RP0 BSF TXSTA,TXEN ;发送允许 BCF STATUS,RP0 WAIT BTFSS PIR1,RCIF ;等待接收数据 GOTO WAIT MOVF RCREG,0 ;读取数据 MOVWF INDF ;将接收到的响应字节存入 PIC2 的 RAM INCF FSR MOVWF TXREG ;发送响应字节 LOOPTX BTFSS PIR1,TXIF ;等待写入完成 GOTO LOOPTX BTFSS FSR,7 ;全部数据接收否? GOTO WAIT1 ;没有,继续接收其它数据 BCF RCSTA,RCEN ;接收完,则关断接收和发送数据允许 BSF STATUS,RP0 BCF PIE1,TXEN BCF STATUS,RP0 CALL LED ;调用显示子程序,将接受到的数据显示出来 END ;程序完
PIC 单片机串口通讯程序
单片机串口通讯是一个常用的程序模块。PIC 单片机是一款常用的单片机。在网 上搜索到一个 PIC 单片机串口通讯程序。这个 PIC 单片机串口通讯程序站长没有 验证,应该是正确的。假如大家有更好的 PIC 单片机串口通讯程序,请向我t ch[15]; main () { int a; int i,j; int b[6]={88,15,38,26,20,0}; char c; clrscr(); outportb(port+3,0x80); /*准备设置波特率*/ outportb(port,0x0C); /*波特率设置为 9 600 bps*/ outportb(port+1,0x00); outportb(port+3,0x03); /*8 位数据位,奇偶检验,1 位停止位*/ outportb(port+1,0x00); /*关中断*/ inportb(port+5); /*读一次线路状态寄存器,使其复位*/ { printf("\t\tsend data or receive data: (s or r?)\n\n\n"); c=getchar(); switch(c) { case ’s’: case ’S’: { while(!(inportb(port+5)&0x20)); /*发送保持器满则等待*/ outportb(port,0x01); /*否则发送数据 01 通知单片机准备接收*/ for(i=0;i<6;i++) /*共发送 6 个数据*/ { a=b[i]; while(!(inportb(port+5)&0x20)) delay(100); /*发送保持器满,等待*/ outportb(port,a); /*发送 a*/ printf("%d\n",a); /*显示 a*/ while(!(inport(port+5)&1)); /*接收单片机送回的数据*/ ch[i]=inport(port); /*保存*/ } delay(10); for(j=0;j<8;j++) /*显示接收的回送数据*/ printf("\n%d\n",ch[j]); getch(); break; } case’r’: /*接收数据*/ case’R’: { while(!(inportb(port+5)&0x20));
PIC16F877ASPI通信C程序
TRISC=0b00010001;//C口SDO为输出SDI为输入,SCK为输出,RC1输出RC0输入开
TRISD=0; //D口全为输出
PORTD=0;
SSPEN=1;//相应的引脚为一般的I/O口
CKP=1;//空闲时钟为高电平
SMP=1;//在数据信号的末端采样
number如果接受与发送的数据不相等则发生错误error1
#include<pic.h>
//注意RB0要接下拉电阻
__CONFIG(0x3F39);
void CSH(void);//初始化子程序
void DELAY(unsigned int n);//函数声明
char SPI_WRITE(char R); //SPI发送函数
A=SPI_WRITE(number);//发送数据
RC2=1;//完成写操作
DELAY(5);
}
void interrupt ISR(void)
{char a;int k;
if(INTF==1)
{
for (k=1024;k>0;k--)NOP();//DELAY(30);//防抖动
INTF=0;//清标志位
}
void WRITE(char number)
{char A;
RC2=0;//片选信号,低电平有效
SPI_WRITE(0b00000110);//允许写入
RC2=1;//完成写使能
RC2=0;//片选信号,低电平有效
A=SPI_WRITE(0b00000010);//写指令
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PIC16F877A与PC机串行通信C语言源程
序
//*******串口通信程序*********
//*******定义变量*************
#include ;
#define unchar unsigned char
#define uint
unsigned int
unchar
RC_label;//标志位起始位为1结束位为0
unchar
caiji_label;//采集帧格式标志位正确为1错误为0 unchar data RC[100];//存储接收到的数据
unchar data TX1[100];//存储自身参数
unchar data TX2[100];//存储出错指示ERROR
int
RC_buff;//
int
i=0,j=0,k=0;//
//*****变量定义完毕************
//*****子程序区****************
//*****串口初始化程序开始********** void initRS232()
{
//设置TXSTA
CSRC=0;//
TX9=0;//8位数据发送
TXEN=1;//发送使能
SYNC=0;//选择异步模式
BRGH=1;//高速
TRMT=1;//发送寄存器空
TX9D=0;//
//设置RCSTA
SPEN=1;//允许串口工作
RX9=0;//接收8位数据
SREN=1;//
CREN=1;//使能连续接收
ADDEN=0;//
FERR=0;//
OERR=0;//无超速错误
RX9D=0;//
TRISC=0X80;//设置C口
SPBRG=0X19;//设置波特率为9600
}
//*******初始化232完毕********
//*******延时子程序开始*********
void delay(int i)
{for(i;--i;) continue;}
//******延时子程序完毕*******
//******中断初始化子程序开始****** void int_interrupt(void)
{
GTE=1;//
PEIE=1;//
RCIE=1;//
}
//*******中断初始化子程序完毕******** //********中断服务子程序开始********* void interrupt receive(void)
{
if(OERR==1)//判断有无超速错误
{
CREN=0;
CREN=1;
}
if(RCIF==1)
{
RC_buff=RCREG;
if(RC_buff==0x2a)//判断是否是起始标志* {
RC_label=1;
}
if(RC_buff==0x23)//判断是否是结束标志# {
RC_label=0;
}
}
if(RC_label==1)
RC[k++]=RC_buff;//将接收到的数据存储在数组中 else if(RC_label==0)
k=0;
if(RC[1]==0XFE&&RC[2]==0XC0&&RC[3]==0X34&&RC[5]== 0X12)//判断数据采集帧格式是否正确
caiji_label=1;
else caiji_label=0;
//********中断服务子程序完毕**********
//********参数发送子程序开始**********
void TX_serve(void)
{
TX1[]={0X2A,0XFD,0X26,0X30,0X31,0X32};//自身参数存储在TX1中
TX2[]={0X56,0X52,0X52,0X4F,0X52};//出错指示存储在TX2中
if(caiji_label==1)//如果数据采集帧格式正确则发送自身参数帧
{
for(j=0;j<6;j++)
{
TXREG=TX1[j];
delay(20);
}
}
if(caiji_label==0) //如果数据采集帧格式错误则发送出错指示
{
for(j=0;j<5;j++)
{
TXREG=TX2[j];
delay(20);
}
}
}
//********参数发送子程序完毕********** //********主程序开始************** void main()
{
int_interrupt();
initRS232();
TX_serve();
end
}。