机载激光雷达均匀扫描的实现方法
激光雷达测绘技术的基本原理和使用方法
激光雷达测绘技术的基本原理和使用方法近年来,随着科技的不断进步和应用需求的增加,激光雷达测绘技术逐渐成为测绘领域的重要工具。
它具备高精度、高效率和高准确性等优势,广泛应用于地理信息系统、交通规划、环境监测等领域。
本文将介绍激光雷达测绘技术的基本原理和使用方法,为读者带来全面的了解。
一、基本原理激光雷达测绘技术是利用激光束在目标表面反射后返回的时间差测量目标的位置和距离的一种技术。
它主要依靠光电探测器对激光脉冲的接收和时间测量来实现。
其基本原理可以分为以下几个步骤:1. 发射激光束:激光雷达通过激光器产生高能量、高频率的激光束,这束激光以非常高的速度向目标表面传播。
2. 接收反射信号:激光束照射到目标表面后,会被目标表面反射,并形成反射信号。
激光雷达通过接收器接收到这些反射信号。
3. 计量时间差:接收到反射信号后,激光雷达会记录下激光束从发射到接收的时间差。
通过这个时间差,可以计算出激光束与目标之间的距离。
4. 三维定位:通过连续发射和接收,激光雷达可以获取多个位置和距离的数据点,进而实现对目标的三维定位。
二、使用方法激光雷达测绘技术的使用方法主要包括设备准备、测量控制和数据处理三个步骤。
1. 设备准备:在使用激光雷达进行测绘之前,需要对设备进行准备工作。
首先要保证设备处于正常工作状态,包括激光器、接收器和控制系统等部分。
其次要根据具体的应用需求选择合适的设备型号和性能参数。
最后要根据实际情况选择合适的测量环境,确保没有干扰和误差。
2. 测量控制:在实际测绘过程中,需要进行测量控制来实现对目标的测量和定位。
首先要选择合适的扫描模式和扫描范围,确保测量的完整性和准确性。
然后要进行定位标定,确定基准点和坐标系,以便后续的数据处理和分析。
最后要根据实际情况对测量参数进行调整,以满足不同场景的测绘需求。
3. 数据处理:激光雷达测绘所得的原始数据通常是一组点云数据。
在进行数据处理时,需要对这些点云数据进行滤波和配准,以去除噪声和误差,并提高数据的一致性和准确性。
机载激光雷达数据处理技术的最佳实践
机载激光雷达数据处理技术的最佳实践机载激光雷达(LiDAR)是一种先进的遥感技术,可以快速获取高精度的地理空间数据,被广泛应用于地质勘探、环境监测、城市规划等领域。
然而,机载激光雷达数据的处理对于获取高质量的地理信息至关重要。
本文将介绍机载激光雷达数据处理的最佳实践,从数据获取到点云处理以及数据应用,探讨如何提高数据处理的效率和精度。
一、数据获取与校正机载激光雷达通过发射激光束并测量其返回的时间来获取地面点云信息。
在数据获取前,需要进行准确的传感器定标和位置定位。
传感器定标包括激光器定标、接收器定标和扫描平面定标,可通过专用设备和标定板进行。
而位置定位则可通过全球定位系统(GPS)、惯性导航系统(INS)和地面控制点(GCP)进行。
二、点云数据处理1.数据预处理由于机载激光雷达数据量庞大,预处理是提高数据处理效率的重要一步。
首先,需要进行数据格式的转换和滤波处理,去除噪声和杂散点。
其次,对于点云的分类、去除地物和异常点等,可以应用机器学习和深度学习算法,提高自动化处理的效果。
2.数据配准与融合机载激光雷达在不同时间、高度和位置采集的数据需要进行配准和融合,以便构建更完整的地理信息模型。
传统的配准方法包括特征点匹配和最小二乘拟合等,而随着研究的深入,也出现了基于特征描述子和深度学习的方法。
3.地物提取与分类机载激光雷达数据处理的一个重要任务是提取地物信息,并进行分类。
地物提取主要包括地面提取和非地面提取。
地面提取可通过高度阈值或分割算法实现,而非地面点云则可以进行聚类和特征提取,进而进行分类。
4.地理信息模型构建机载激光雷达数据处理的最终目标是构建精确的地理信息模型。
地理信息模型包括数字地面模型(DEM)、数字地面高程模型(DSM)和三维建筑物模型等。
通过数据处理和算法优化,可以精确提取地物的形状、高度和纹理等属性,为后续应用提供基础数据。
三、数据应用机载激光雷达数据处理后,可以应用于各个领域,为决策和规划提供有力支持。
测绘技术中的车载激光雷达原理与数据处理方法详解

测绘技术中的车载激光雷达原理与数据处理方法详解车载激光雷达(Mobile LiDAR)作为一种新兴的测绘技术,以其高精度、高效率的特点,在地理信息、城市规划、交通管理等领域得到了广泛应用。
本文将详细介绍车载激光雷达的原理以及相关的数据处理方法。
一、激光雷达原理激光雷达利用激光束对目标进行扫描,通过测量激光束的往返时间和方向来获取目标的三维坐标信息。
车载激光雷达由激光器、接收器、扫描镜头和数据处理系统等部件组成。
1. 激光器:激光器产生高能量的激光束,通常采用固态激光器或半导体激光器。
2. 接收器:接收器接收激光束反射回来的信号,通常采用高灵敏度的光电探测器。
3. 扫描镜头:扫描镜头通过旋转或振动将激光束聚焦在不同方向上,实现对目标的全面扫描。
4. 数据处理系统:数据处理系统将接收到的激光点云数据进行坐标转换、滤波、配准等处理,生成三维点云模型。
二、数据处理方法车载激光雷达获取的点云数据量庞大,如何高效地处理这些数据成为了一个关键问题。
以下介绍几种常见的数据处理方法。
1. 数据滤波:由于车载激光雷达工作环境复杂,可能受到树木、电线等干扰,导致点云数据中存在噪点。
常用的数据滤波方法有高度阈值滤波、曲率滤波等,可以去除噪点,提高数据的精度和稳定性。
2. 地面提取:在车载激光雷达的应用中,往往需要提取地面信息,例如用于数字地图、道路设计等。
地面提取方法通常利用点云数据的高度信息,结合地形特征进行分析,通过平面拟合或者分割算法提取地面点。
3. 物体识别:车载激光雷达可以对道路上的物体进行自动识别,例如车辆、行人等。
物体识别方法往往基于机器学习或深度学习技术,通过对点云数据进行特征提取和分类,实现对不同物体的准确识别和定位。
4. 三维重建:车载激光雷达可以将获取的点云数据进行三维重建,生成真实世界的模型。
三维重建方法通常利用基于体素的体素网格分割算法,在处理大规模点云数据时具有较高的效率和精度。
5. 室内定位:车载激光雷达不仅可以在室外环境中使用,也可以应用于室内定位。
机载激光雷达航测技术
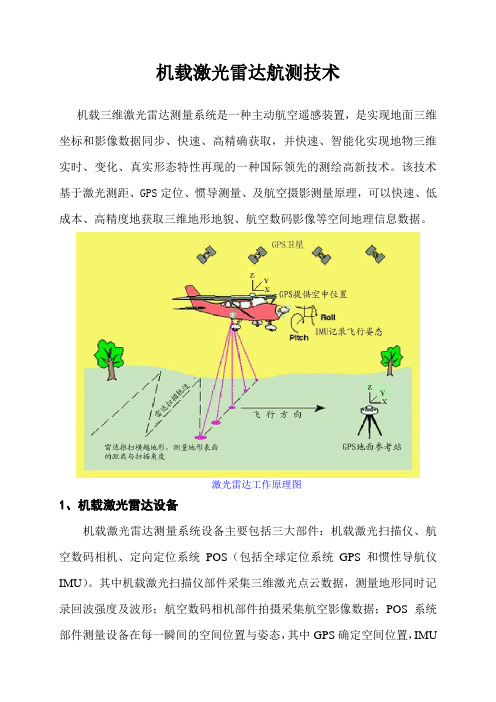
机载激光雷达航测技术机载三维激光雷达测量系统是一种主动航空遥感装置,是实现地面三维坐标和影像数据同步、快速、高精确获取,并快速、智能化实现地物三维实时、变化、真实形态特性再现的一种国际领先的测绘高新技术。
该技术基于激光测距、GPS定位、惯导测量、及航空摄影测量原理,可以快速、低成本、高精度地获取三维地形地貌、航空数码影像等空间地理信息数据。
激光雷达工作原理图1、机载激光雷达设备机载激光雷达测量系统设备主要包括三大部件:机载激光扫描仪、航空数码相机、定向定位系统POS(包括全球定位系统GPS和惯性导航仪IMU)。
其中机载激光扫描仪部件采集三维激光点云数据,测量地形同时记录回波强度及波形;航空数码相机部件拍摄采集航空影像数据;POS系统部件测量设备在每一瞬间的空间位置与姿态,其中GPS确定空间位置,IMU惯导测量仰俯角、侧滚角和航向角数据。
机载激光雷达设备主要构成天宝公司Harrier 68i是当今世界最强性能水平的全新一代机载三维激光雷达系统之一,在系统稳定性、硬件性能指标、软件配套等方面领先于其它同类产品。
Harrier 68i机载激光雷达测量系统该设备具有以下特点:➢能够接收无穷次回波的全波形数据➢最大脉冲频率可高达40万赫兹➢距离精度最高可为±2 cm➢实现与GPS、INS、数码相机等设备无缝结合➢符合激光安全标准,允许在任何高度进行安全操作➢IMU惯导仪的采样频率高达200Hz➢集成高精度航空数码相机,像素为6000万2、生产流程机载激光雷达航测作业的生产环节,主要包括航飞权申请、航摄设计、航摄数据采集、数据预处理、激光数据分类、数字高程模型(DEM)制作、数字正射影像(DOM)制作、建筑物三维白模生产等环节。
机载激光雷达航测工作流程1)航摄准备。
该阶段除需进行项目所需资料的收集以及人员和设备的配备保障等各项项目准备工作外,最主要的工作是按相关规定和流程申请获得项目测区的航飞空域使用权,这是开展后续工作的前提条件。
机载激光雷达测绘技术的原理和实践
机载激光雷达测绘技术的原理和实践地球是我们熟悉的家园,它的形态复杂多样。
人类为了更好地了解地球表面的自然地理和人文地理信息,开发了一系列测绘技术。
机载激光雷达测绘技术就是其中一种重要的技术,它以其高精度、高效率的测绘特点而广泛应用于地理信息领域。
机载激光雷达测绘技术是一种利用激光雷达设备获取地表高程和地貌等信息的测绘方法。
其原理基于光电测距技术,通过发射一束激光束并接收反射回来的激光束,来测量目标物体与仪器的距离。
具体来说,机载激光雷达测绘设备通过发射高频频率的激光束,在很短的时间内完成多次扫描,将激光束照射到地面或其他目标物体上。
然后,它通过接收激光束的反射信号,计算出目标物体与仪器的距离。
通过重复测量不同位置的距离,机载激光雷达测绘设备可以获得地面的高程数据。
机载激光雷达测绘技术的实践取得了显著的成果。
首先,它可以用于数字地形模型(DTM)的制作。
DTM是描述地球表面高程信息的一种数字模型,可以提供地形的具体信息,比如山脉、河流、道路等。
利用机载激光雷达测绘技术,可以高精度地获取地表的高程数据,进而制作出高分辨率、高精度的DTM。
这对于城市规划、自然资源管理、灾害预警等领域具有重要意义。
其次,机载激光雷达测绘技术还可以应用于林业资源调查。
林业资源调查是指调查和监测森林资源的状况和变化。
传统的林业资源调查工作需要大量的人力和物力,而且时间成本较高。
而机载激光雷达测绘技术可以快速、自动化地获取森林地区的植被高度、密度和分布等信息,为林业资源调查提供了高效的手段。
同时,机载激光雷达测绘技术还可以检测森林的火灾痕迹,提前发现和预防火灾的发生,减少林业资源的损失。
另外,机载激光雷达测绘技术在城市规划和建筑设计中也起到了关键作用。
在城市建设中,了解地面的高程和地貌信息对于规划道路、布置建筑物等工作至关重要。
利用机载激光雷达测绘技术,我们可以获取城市地区的高程、地形和建筑物等信息,辅助规划和设计工作。
同时,机载激光雷达测绘技术还可以用于测量建筑物的几何形状,为建筑设计提供精确和准确的参数数据。
激光雷达扫描方式【详解】
激光雷达作为一种主动遥感探测技术和工具已有近60年的历史,目前广泛用于地球科学和气象学、物理学和天文学、生物学与生态保持、军事等领域。
其中,传统意义上的激光雷达主要用于陆地植被监测、激光大气传输、精细气象探测、气候预测、海洋环境监测等。
随着激光器技术、精细分光技术、光电检测技术和计算机控制技术的飞速发展,激光雷达在遥感探测的高度、空间分辨率、时间上的连续监测和测量精度等方面具有独到的优势。
尤其在大气探测方面取得显著发展,对各种参数的测量空间覆盖高度已经可以实现从地面到120km的高度,其应用前景得到普遍的关注。
激光雷达按扫描方式分类:1、MEMS型激光雷达MEMS 型激光雷达可以动态调整自己的扫描模式,以此来聚焦特殊物体,采集更远更小物体的细节信息并对其进行识别,这是传统机械激光雷达无法实现的。
MEMS整套系统只需一个很小的反射镜就能引导固定的激光束射向不同方向。
由于反射镜很小,因此其惯性力矩并不大,可以快速移动,速度快到可以在不到一秒时间里跟踪到2D 扫描模式。
2、Flash型激光雷达Flash型激光雷达能快速记录整个场景,避免了扫描过程中目标或激光雷达移动带来的各种麻烦,它运行起来比较像摄像头。
激光束会直接向各个方向漫射,因此只要一次快闪就能照亮整个场景。
随后,系统会利用微型传感器阵列采集不同方向反射回来的激光束。
Flash LiDAR有它的优势,当然也存在一定的缺陷。
当像素越大,需要处理的信号就会越多,如果将海量像素塞进光电探测器,必然会带来各种干扰,其结果就是精度的下降。
3、相控阵激光雷达相控阵激光雷达搭载的一排发射器可以通过调整信号的相对相位来改变激光束的发射方向。
目前大多数相控阵激光雷达还在实验室里呆着,而现在仍停留在旋转式或MEMS 激光雷达的时代,4、机械旋转式激光雷达机械旋转式激光雷达是发展比较早的激光雷达,目前技术比较成熟,但机械旋转式激光雷达系统结构十分复杂,且各核心组件价格也都颇为昂贵,其中主要包括激光器、扫描器、光学组件、光电探测器、接收IC以及位置和导航器件等。
激光雷达扫描仪的使用技巧
激光雷达扫描仪的使用技巧激光雷达(Lidar)扫描仪是一种先进的测量设备,通过发射激光束并测量其返回时间来获取周围环境的三维点云数据。
在各个领域中,激光雷达扫描仪的应用正在迅速增加,包括无人驾驶汽车、机器人导航、建筑测量等。
然而,要充分利用激光雷达扫描仪的潜力,需要掌握一些使用技巧。
本文将介绍激光雷达扫描仪的使用技巧,从数据采集到后期处理的整个流程进行说明。
1. 数据采集技巧在使用激光雷达扫描仪进行数据采集时,有几个关键要点需要注意。
首先,确定采集区域的范围,考虑到扫描仪的测量范围和采样密度。
如果采集区域较大,建议选择多个位置进行扫描,并在后期处理时将数据进行融合。
其次,根据实际需求选择合适的扫描模式,包括水平扫描、垂直扫描和旋转扫描等。
在选择扫描模式时,需要考虑到采集的效率和数据的全面性。
此外,为了获取更好的数据质量,需要注意避免遮挡物和杂乱的反射。
2. 数据处理技巧激光雷达扫描仪采集到的数据通常以点云形式呈现,因此后期的数据处理是必不可少的。
首先,需要进行数据去噪处理,去除掉干扰点和异常点。
可以采用滤波算法,例如高斯滤波和统计学滤波等,以提高数据质量。
其次,进行点云配准,将多个扫描位置的数据进行对齐和融合。
配准过程中可以使用特征匹配和最小二乘法等方法,以达到最佳的配准效果。
最后,进行特征提取和分割,根据实际需求提取点云数据中的关键特征,并将其进行分割和分类,以便后续应用。
3. 数据可视化技巧将处理后的点云数据进行可视化可以更直观地展示和分析结果。
在进行数据可视化时,需要考虑到数据的规模和复杂度。
对于较大规模的数据,可以使用简化算法对数据进行降采样;对于较复杂的数据,可以选择合适的渲染方式,例如贴图渲染和光照渲染等,以增强可视化效果。
另外,可以选择合适的颜色映射方案和视角设置,以便更好地传达数据信息。
同时,结合其他数据源,例如地图和图像等,可以进一步丰富点云数据的可视化效果。
4. 数据分析技巧激光雷达扫描仪采集到的点云数据具有丰富的信息,可以用于各种领域的分析。
机载测深激光雷达的原理
机载测深激光雷达的原理
机载测深激光雷达是一种用于测量水下地形的设备。
其原理是利用激光束在水面上产生反射,并通过测量激光束的传播时间来计算目标物体与传感器之间的距离。
具体原理如下:
1. 发射激光束:激光器在机载设备上发射出一个窄束的激光束。
2. 激光束照射到水面上:激光束照射到水面上,部分能量被水面吸收,部分能量进入水下。
3. 水下目标反射:进入水下的激光束遇到水下目标(如海底地形),一部分能量会被目标物体吸收,另一部分会被目标物体反射。
4. 接收反射信号:接收器接收到从水下目标反射回来的激光信号。
5. 计算传播时间:通过测量激光信号从发射到接收的时间来计算激光束传播的时间。
6. 计算距离:利用光速和传播时间,可以计算出激光束从传感器到目标物体的距离。
7. 生成地形图:通过扫描不同位置,测量多个点的距离后,可以生成水下地形的三维地图。
机载测深激光雷达利用激光束的速度快、方向性强的特点,能够在较短的时间内获取大量水下地形数据,广泛应用于海洋调查、航海导航、港口建设等领域。
激光雷达激光器的扫描方式
激光雷达激光器的扫描方式目前市场上的脉冲式激光器有四种扫描方式1.振荡(或钟摆)式(Oscillating Mirror)2.旋转棱镜式(Rotating Polygon)3.章动(或Palmer)式(Nutating Mirror,or Palmer Scan)4.光纤扫描式(Fiber Switch)钟摆扫描方式原理:光直接入射到反射平面镜上,每一个钟摆周期在地面上生成一个周期性的线性图案,Zig-Zag型,或称为之字形。
生产厂家:Optech和徕卡公司钟摆扫描时,反射镜面需要在一秒内振荡数百次,同时要不断地、循环地从一端开始启动,加速、达到钟摆的最低点后,减少,知道速度为零,到达钟摆的另一端。
因此它的扫描方向是左右两个方向的。
优点:1.对于扫描视窗角(FOV),扫描速度有多种选择,使得地面的覆盖宽度和激光点密度的选择有较多的机会;2.大的光窗数值孔径;3.较高的接受信号比。
弱点:1.由于在一个周期内,不断地经历了加速、减速等步骤,因此,所输出的激光点的密度是不均匀的。
这种不均匀性在扫描角度很小(如+-2°)时,因为过程短,并不显著;当扫描角逐渐增大,大到+-4°时,不均匀性会越来越显著;2.由于反射镜的加速/减速,造成了激光点的排练一般是在钟摆的两端密,中间疏。
而中间的数据是更受关注的。
由于在钟摆的两端,镜面的摆动速度较低或停止,并扫描两次,因此所得的数据精度差,需要剔除,约占总数据的10%,如扫描角为+-22.5°,只选取+-20°;3.由于不断地变化速度,造成了机械的磨损,使得IMU的配置发生了漂移,依次每一次飞行前都需要进行“boresight”检校飞行;4.消耗更多的功率。
旋转棱镜式扫描原理:激光入射到连续旋转的多棱镜的表面上,经反射在地面上形成一条条连续的、平行的扫描线。
激光器生产厂家:Riegl激光雷达生产厂家:IGI,TopoSys,FliMap,iMAR,Fugro/Chance优点:1.需要的功率小;2.棱镜旋转的角速度不变,使得激光点的密度均匀,尤其是沿飞机飞行的方向的线间距完全相同。
激光雷达测量技术的基本原理与操作方法
激光雷达测量技术的基本原理与操作方法激光雷达是一种利用激光束进行测量的先进技术,广泛应用于地理测绘、自动驾驶、环境监测等领域。
本文旨在介绍激光雷达的基本原理以及操作方法。
一、激光雷达的基本原理激光雷达通过发射一束短暂且高强度的激光束,并通过测量激光束的反射时间和散射强度来确定目标物体的距离、位置和形状。
其基本原理可以归纳为三个步骤:激光发射、激光接收和数据处理。
首先,激光雷达通过激光器产生一束经过调制的激光束,发射到目标物体表面。
激光束的能量和频率与激光器的参数有关,需要根据具体应用选择合适的参数。
其次,激光束照射到目标物体表面后会被反射回来,激光雷达的接收器会接收到这些反射的激光,并通过计时方法测量激光束的往返时间。
根据光的传播速度和测量的时间,可以计算出目标物体与激光雷达的距离。
最后,激光雷达接收到的反射激光经过光电转换器转换为电信号,并经过AD转换器数字化处理。
这些数据通过算法进行处理,可以得到目标物体的位置、形状和其他相关信息。
二、激光雷达的操作方法1. 安装与校准激光雷达的安装位置和角度对于测量结果的准确性至关重要。
在安装前,需要根据具体需求选择合适的安装位置,并确保激光雷达与目标物体之间没有物体遮挡。
安装完成后,需要进行校准。
校准的目标是调整激光雷达的参数以使其输出与实际测量结果一致。
校准过程中,需要参考激光雷达的说明书进行操作,通常涉及角度的校准、角度补偿和坐标系的转换等步骤。
2. 数据获取与处理在操作激光雷达之前,需要选择合适的扫描模式。
常见的扫描模式有水平扫描、垂直扫描和多线扫描等。
选择合适的扫描模式能够提高数据采集的效率和准确性。
激光雷达可以通过旋转、振荡或多束激光等技术实现扫描。
具体的操作方法需要参考激光雷达的说明书,通常涉及设置采样频率和角度范围、选择扫描模式和启动数据采集等步骤。
数据处理是激光雷达技术的关键环节。
通过对采集到的激光数据进行滤波、降噪和融合等处理,可以提高测量结果的质量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
同 样 以 1/4 个 周 期 来 进 行 分 析 。 在 0~t0 时 刻 , 电 机 波 形 以 前 面 推 导 的 公 式 计 算 , 记 为 !1 (t), t0 ~t1 时 刻
的波形通过多项式拟合得出。
2
3
4
设
!2 (t)=a0 +a1 t+a2 t +a3 t +a4 t
(8)
在 t0 时刻有:
Key wor ds: Uniform scanning; Laser scanning; Lidar; Galvanometer
收 稿 日 期 : 2007- 10- 15 ; 修 订 日 期 : 2007- 12- 10 基 金 项 目 : 国家 863 计划资助项目( 2007AA12Z105) 作 者 简 介 : 卜弘毅( 1981- ) , 男, 江苏扬州人, 博士生, 研究方向为红外光电技术、激光扫描技术。Email: hongyibu@gmail.com 导 师 简 介 : 王 建 宇 (1959- ) , 男 , 浙 江 宁 波 人 , 研 究 员 ,博 士 生 导 师 , 研 究 方 向 为 光 电 遥 感 系 统 、机 载 和 星 载 光 电 遥 感 仪 器 、信 息 获 取
图 1 机载激光雷达扫描方式示意图 Fig.1 Scanning pattern of the airborne lidar
假设激光等间隔发射 , 重 复 频 率 为 f, 扫 描 频 率 为 fscan , 扫 描 视 场 为 2!, 飞 机 飞 行 速 度 为 v, 忽 略 其 自 身 姿态变化。
676
红外与激光工程
第 37 卷
0引言
机载激光雷达是一种新兴的主动对地观测手段。 能够同时给出地面目标的三维位置和影像的一体化 信息, 是对地观测技术的一个前沿发展方向。国际上 实用化的机载激光雷达, 多采用高重复频率激光器配 合 光 机 扫 描 的 结 构 。扫 描 机 构 的 性 能 一 定 程 度 上 决 定 了系统的优劣。
第4期
卜弘毅等: 机 载 激 光 雷 达 均 匀 扫 描 的 实 现 方 法
677
频分量, 所以必须使这个过程尽可能平滑, 使高频分量 最小。这里可以通过曲线拟合的方法来实现[5], 见图 3。
图 3 输入扫描曲线拟合 Fig.3 Polynomial fitting on the input scanning curve
目前, 机载激光雷达扫描机构多采用振镜做正弦 方 式 的 扫 描[1- 2], 这 种 方 案 实 现 简 单 , 但 将 导 致 地 面 激 光点的不均匀分布, 造成激光点的浪费, 和反演后图 像质量的下降。因此, 研究均匀扫描技术具有重要的 工 程 价 值 。舒 嵘[3]、胡Байду номын сангаас以 华[4]等 人 对 机 载 激 光 雷 达 均 匀 扫 描 进 行 了 理 论 分 析 , Pierre[5]提 出 通 过 电 流 曲 线 双 重 积 分减小电机输入曲线高次谐波分量的方法, Jagmohan [6]提 出 了 一 种 曲 线 拟 合 的 方 法 , 并 应 用 于 工 程 。 文 中 对机载激光雷达均匀扫描技术进行了研究, 并提出了 一 种 工 程 实 现 的 方 法 。该 方 法 可 以 根 据 要 求 的 扫 描 频 率和视场角, 自动给出最佳电机输入曲线。
!!
# #
1
(
t
)
=
!
2
(
t
)
=
a
#
# # #
d!
1
(
t
)
# #
dt
"
=
d!2 (t) dt
=k
(9)
#
#
#2
2
d! #
# #
1
#
(t)
2
=
d!2
(t)
2
=0
# $
dt
dt
在 t1 时刻有:
即有:
!!
# #
2
(
t
)
=
Vp
#
#
" # #
d!
2
(
t
)
dt #
# $
=0
(10)
%
2
3
4(
1 t &
& &
0
0, 1 4fscan
(1)
则地面激光点偏离机下点距离为:
" $ L=H·tan[!sin(2#fscan·t)], t∈
0, 1 4fscan
(2)
这是一个非线性关系, 激光点在地面将呈现不均匀分
布。同理, 如果扫描电机以匀速运动, 可以得到:
% $ "=4fscan!·t, t∈
0, 1 4fscan
由于对称性, 可以 1/4 周期为例进行分析。若扫 描电机以正弦方式扫描, 扫描光学角为 ", 且满足:
图 2 扫描电机幅频特性曲线 Fig.2 Frequency response of the scanning motor
电机运行至最大角度附近时, 不可能立刻反转, 如不对波形进行平滑处理, 尖锐的波形将包含大量高
" $ "motor
=
1 2
arctan(4fscan tan!·t), t∈
0, 1 4fscan
(7)
将以上结论推广到整个周期就得到了理想均匀
扫描应满足的公式。
2 均匀扫描的实现
由理论分析可以得知, 振镜电机可近似为二阶低 通 系 统 [6], 对 高 频 分 量 将 呈 现 低 通 滤 过 的 特 性 。 图 2 是 实 际 测 量 得 到 的 扫 描 电 机 幅 频 特 性 曲 线 。以 上 理 论 分析得到的曲线中包含各种谐波成分, 高次谐波通过 电机不但会衰减, 还会导致电机运行不稳定, 并引起 发 热 等 现 象 。所 以 还 需 要 对 以 上 理 论 分 析 得 到 的 曲 线 做一定处理, 尽可能地减小高次谐波分量。
关键词: 均匀扫描; 激光扫描; 激光雷达; 振镜 中 图 分 类 号 : TP312 文 献 标 识 码 : A 文 章 编 号 : 1007- 2276(2008)04- 0675- 04
Method of achieving unifor m scanning of air bor ne lidar
1 理论分析
机载激光雷达是以脉冲激光作为探测手段, 由扫描 机构做一维横向扫描, 由飞机飞行完成另外一维的扫 描。近些年来, 由于扫描效率高, 扫描机构多以振镜电机 直接驱动扫描镜做摆动扫描, 激光点在地面呈 现“Z”字 型分布[7-8]。机载激光雷达扫描方式如图 1 所示。
" # "=!sin(2#fscan·t), t∈
第 37 卷第 4 期 Vol.37 No.4
红外与激光工程 Infrared and Laser Engineering
2008 年 8 月 Aug. 2008
机载激光雷达均匀扫描的实现方法
卜弘毅, 王建宇, 舒 嵘
( 中 国 科 学 院 上 海 技 术 物 理 研 究 所 , 上 海 200083)
与 处 理 技 术 。Email : jywang@mail.sitp.ac.cn 舒 嵘 (1971- ) , 男 , 上 海 人 , 研 究 员 , 博 士 生 导 师 , 研 究 方 向 为 激 光 遥 感 技 术 、超 光 谱 成 像 技 术 。 Email : shurong@mail.sitp.ac.cn
(3)
地面激光点也将呈现非均匀分布。
要使地面激光点均匀分布, 即激光点在地面的移
动速度为常数, 则:
v=4fscan·Htan!
(4)
对 1/4 周期内任意扫描角度有:
Htan"(t)=v·t
(5)
可以得到:
" $ "=arctan(4fscantan!·t), t∈
0, 1 4fscan
(6)
对于电机来说, 其实际转动的角度应为:
BU Hong!yi, WANG Jian!yu, SHU Rong
(Shanghai Institute of Technical Physics, Chinese Academy of Sciences, Shanghai 200083,China)
Abstr act : Airborne lidar is used to detect a target by scanning with a single beam of laser. Generally, the distribution of the laser footprints on the ground is not uniform due to the flaw of the scanning mechanism. In the fact, it is more difficult to give the better quality of the image inversion for the uniform scanning than the non!uniform scanning. Firstly, the formula of the uniform scanning of the airborne lidar was discussed and a method to achieve the uniform scanning was given. The input waveform of the scanning motor was based on the formula in the middle of the view field. While on the edge of the view field, the polynomial fit was used to smooth the waveform and reduce the harmonic content. The parameters of the fit process were determined by the iterative way on the basis of frequency response of the galvanometer measured from the experiment. Compared with other methods, the proposed method can automatically give the optimal input waveform of the scanning motor based on the given scanning frequency and view field angle, so that the scanning parameters can be changed easily in engineering applications. The simulation test results show that the scanning system can achieve the uniform distribution and the good linearity of the laser points by using the proposed method.