木质六足爬虫机器人制作全过程
六足爬虫机器人设计
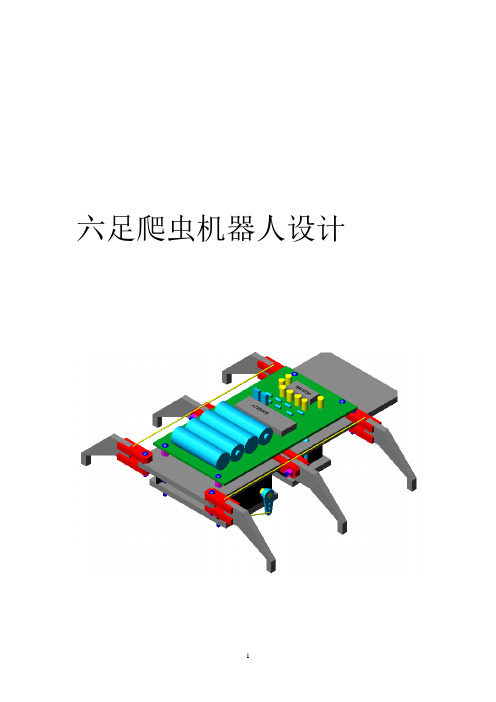
六足爬虫机器人设计设计人:李海鹰日期:2004年9月30日目录前言 (3)(一)、机器人的大脑 (3)(二)、机器人的眼睛耳朵 (4)(三)、机器人的腿——驱动器与驱动轮 (4)(四)、机器人的手臂——机械传动专制 (5)(五)、机器人的心脏——电池 (5)一、AT89S51单片机简介 (6)(一)、A T89S51主要功能列举如下: (6)(二)、A T89S51各引脚功能介绍: (6)二、控制系统电路图 (9)三、微型伺服马达原理与控制 (10)(一)、微型伺服马达内部结构 (10)(二)、微行伺服马达的工作原理 (10)(三)、伺服马达的控制 (11)(四)、选用的伺服马达 (11)四、红外遥控 (12)(一)、红外遥控系统 (12)(二)、遥控发射器及其编码 (12)(三)、红外接收模块 (13)(四)、红外解码程序设计 (14)五、控制程序 (14)六、六足爬虫机器人结构设计图 (21)前言今年年初,学校为参加中央电视台举办的第三届全国大学生机器人电视大赛,组建了机器人制作小组。
我积极参加,有幸成为了其中的一员。
因为我们以前没有参加过类似的比赛,也没有制作机器人的经验。
可以说我们什么都是从零开始,边学习边制作。
通过这半年多的制作过程,我从中学到了很多书本上学不到的东西,也得到了很好的学习与锻炼的机会。
最初,我们组建了机器人制作实验室。
到五金机电市场购买了必要的工具和一些制作材料。
然后开始制作实验机器人的身体——框架。
实验机器人的框架我们是使用轻型万能角钢制作的,这种角钢的两侧都有间隔均匀的孔槽,可以很方便的用螺栓进行连接。
用不同长度的角钢组合后,就可以得到不同大小的立方体和长方体及多边形。
机器人身体的框架就搭建好了。
在它的上面将装上:机器人的大脑——可编程控制器、机器人的眼睛耳朵——传感器、机器人的腿——驱动轮、机器人的手臂——机械传动专制、机器人的心脏——电池……之所以使用轻型万能角钢,主要是因为是在制作试验机型,而轻型万能角钢安装拆卸方便和便于修改长度,调整设计。
六足机器人基本结构搭建
(十一) 六足机器人组装步骤
观看视频
最后 安装 电池 盒, 整个 六足 机器 人组 装完 毕。
基本规则---小学组
小学组:直线行走
小学组竞赛方式:
1、机器人从起点区出发,作品前端触到分 值区域及获得比赛得分。
2、采取赛两场方式,取最高分数作为比赛 积分。
3、当机器人从起点出发后,比赛队员不能 用手触碰作品,否则取消当次比赛成绩。
中间维修、调试时间为5分钟。 4、所有机能竞赛项目都采取赛两场,取最
高分数作为比赛积分。
作品制作
机构本体限用组委会提供的材料制作,并 于现场完成。
非机能运作零件如止滑垫、垫片及机体上 的加重物及装饰物等,经裁判员认可后可 带入场地,如有违反作品制作规定之参赛 队伍及作品,取消参赛资格。
个人单项目应在参加学校普及选拔的的基础上不 少于300支队伍,按照10%比例名额推荐参加全 省总冠军决赛。300支以下的通过参加区域赛选 拔获取全省总冠军决赛资格。
大赛组委会根据学校活动和申请核批省级竞赛分 赛场并指定区域赛赛场。
奖项设置
1、学校奖项设置 团体项目冠、亚、季军和等级奖 机器人创新教育学校奖 机器人创新教育优秀校长奖 机器人创新教育优秀教练员奖
作品制作通则
(1)作品尺寸:作品(含创意造型)须在 长 25 厘米、宽15 厘米、高15 厘米内, 并可平放于尺寸盒。无法平放于尺寸盒内 之作品,取消参赛资格。所有作品测量尺 寸时须平放并展开至最大长度。
(2)参赛者可携带 A4 大小打印之工作图 (页数不拘)进入制作场地,其它形式不 可携带使用。
竞赛工具
1、工具自带,如十字螺丝刀等 2、自备2节5号碱性电池
参加人员范围和报名办法
六脚爬虫机器人步态算法和控制系统——阿童木
毕业设计 [ 论文 ]题目:六脚爬虫机器人运动步态规划和控制系统搭建2011 年6 月9日毕业设计开题报告六脚爬虫机器人运动步态规划和控制系统搭建1课题来源本课题是受深圳德普施公司委托,为其研发第二代六脚爬虫机器人。
2课题研究的目的和意义随着世界科技的发展和人们生活水平的提高,机器人无疑将成为未来世界的宠儿。
机器人可以代替人类完成重复性和枯燥的任务,可以为人类服务,也可以到人类不能去的危险区域探索作业。
鉴于此,我们有必要加大对机器人领域的研究,去开发多功能的,环境适应性强的新一代机器人。
目前,在地面上能独立行进完成相应功能的机器人主要有两类,一种是由轮子驱动的轮行机器人,另一种是基于仿生学的步行机器人。
尽管轮行机器人在平坦地面上行进稳定,速度快,效率高;但其最大的不足就在于对未知的复杂地形,其适应能力很差。
而步行机器人可以在复杂的自然地形中较为容易的完成前进和探测。
所以针对军事侦察,危险区域作业,星球探测,矿山开采,教育娱乐等地面环境不确定性大的领域,步行机器人有更广阔的应用前景和更高的实用价值。
而在步行机器人中,多足机器人是最容易实现稳定行走的。
由于六足机器人相对类人和四足机器人具有控制系统简单、肢体冗余和行走平稳等优点,本课题我们选择制作一个模仿昆虫肢体结构和运动控制策略的六足机器人。
为了适应复杂多变的自然环境,在昆虫身上进化出成百上千的感应器来感测环境信息。
本课题也试图在机器人身上安装各种传感器来感测外部环境,让机器人可以在未知的,复杂的环境中行走,完成一定的任务。
当然,试图实现昆虫所有感测功能是不现实的,我们只是模拟其一部分功能。
同时,为了增强机器人的实用性,我们提供了另外两种控制方法,即触摸屏控制和无线控制。
本课题作为机器人设计的一部分,其目的是对六足仿生机器人的控制方法和步态策略进行研究,针对一个六足仿生机器人的本体设计新型的控制系统硬件,并尝试用触摸屏去显示机器人的状态和控制机器人的步态。
(机械制造行业)六脚爬虫机器人机械结构设计和控制系统搭建

(机械制造行业)六脚爬虫机器人机械结构设计和控制系统搭建摘要本文详细介绍了六脚爬虫机器人的机械结构以及控制程序的编写。
机械结构采用了对称式设计,结构简单;其行走功能由六只脚、18个舵机实现,自由度较高,稳定性、灵活性较好。
控制程序的主体是C语言。
包括基本步态的编写,以及传感器的在机器人上的高级应用,这样,机器人在满足基本行走运动的同时,也能感知外界环境,并通过控制器对接收到的外界信号进行处理,并控制机器人运动。
关键词:对称式结构,舵机控制器,步态,传感器Abstract ThethesisdescribesindetailthatthemechanicdesignofHexcrawlerandthepil ingofcontrolprogram. Thestructureoftherobotisinsymmetricexpression,asimplemechanism;thef unctionofwalkingissupportedbysixlegs,andeighteenmotors,withmultiple degreesoffreedom.Besides,itisofhighstabilityandflexibility. TheprogramtocontroltherobotiswritteninClanguage,includingbasicgait,t headvancedapplicationofsensors.Thereby,therobotcanwalkinseveralgaits .Atthesametime,itcansensetheconditionaroundit.Then,itwillprocesstheda taitreceived,andcontrolthemotionoftherobot.Keywords:symmetricexpression,PSCU,gait,sensor目录摘要IAbstractII目录III1绪论-1-1.1课题来源-1-1.2本课题的目的及其意义-1-1.3国内外发展现状-1-1.4本课题的研究内容-5-2机械结构设计介绍-6-2.1功能需求与分析-6-2.2材料选择与结构设计介绍-6-3舵机控制板原理与应用-9-3.1舵机原理介绍-9-3.2舵机控制板原理介绍-10-3.3如何使用舵机控制板-12-3.4控制板程序编写-14-4STM32开发板介绍与程序编写-18-4.1STM32F107芯片简介-18-4.2软件与编程初始准备-18-4.3GPIO与AFIO设置与应用-18-4.31GPIO设置与应用 (18)4.32AFIO-----I/O口重映射 (22)4.4USART设置与应用-22-4.5外部中断设置与应用-26-4.6系统时钟设置与应用-29-4.61系统时钟简介与应用 (29)4.62定时器配置 (31)4.7机器人行走步态程序编写-32-4.71机器人行走步态简介 (33)4.72三脚步态 (35)4.73四脚步态 (37)4.74单脚(波动)步态 (38)4.75转弯与横爬步态 (40)4.8多传感器应用与程序编写-43-4.81指南针传感器 (43)4.82红外、光敏传感器 (45)4.83柔性力传感器 (46)4.84温湿度、发声、射频识别(RFID)传感器 (48)4.85无线(Zigbee)传感器 (49)4.86超声传感器 (52)5总结-55-致谢-56-参考文献-57-1绪论1.1课题来源本项目来源于华中科技大学与伍斯特理工学院合作的WPI项目。
机器人等级考试搭建-六足步行机器人

第11章六足步行机器人仿生六足机器人又叫蜘蛛机器人,顾名思义,六足机器人架构中惜鉴了自然界中昆虫的行走方式,是多足机器人的一种。
11.1探索六足的行走方式是多样的,其中最典型的行走方式就是模仿六足纲昆虫的三角步态。
图 11.1六足步行机器人三角步态是什么样子呢?六足昆虫行走时,一般不是六足同时直线爬行,而是将三对足分成两组,每组三只足,以三角形支架结构交替前进,如图11.2所示。
分组情况是这样的:身体左侧的前后、足及右侧的屮足为一组,右侧的前足、后足和左侧的中足为另一组,分别组成两个三角形支架。
行走时接触地而的腿如绿方块所示,形成稳定的三角结构,这样模型通常会保持直立平稳的走姿而不会走路时跌跟头了。
这种六足机器人控制简单,不过动作单一,因为他的毎个关节都是通过机械连接完成,最后由一个统一的动力源控制。
另外,我们还能看到很多杂的六足机器人每一个关节都足分开控制的。
参照关节类动物的运动形式,这个六足机器人的每条腿的关节都是相对独立的,每个关节都是用180度的舵机来实现的,每条腿上三个关节,对应就是3个舵机,六条腿就是18个舵机。
不过这种用18个舵机支搾起来的机器人控制复杂,对电源的要求太高,还需要通过程序来控制,调试时间长。
我们综合以上的知识内容,制作一个六足移动机器人,即保证了机器人的控制苟单,也能实现机器人前后左心、左转右转的移动效果。
11.2制作7倍10倍这里要注意的是2倍的梁圆孔部分要朝上,和对面的正好相反10倍和12倍11.3六足运动方式六足机器人的运动方式为三角步态,上面我们简单介绍过,三角步态就是六足机器人的六只足分成了两组,组成了两个三角支架。
当一组三角形支架所有的足同时提起,另一机三角形的足原地不动,支撑身体并以中足为支点。
这一组的三脚架抬起到下落的过程中,前肢的构件向前迈进拉动身体向前,后足的构件将机器人向前推。
这一组落地,另一组的三只足抬起,重心落在这一组三角形支架的三足上,然后重复前—组的动作,之后互相轮换周而复始。
简易机器人专题讲座制作六角虫机器人
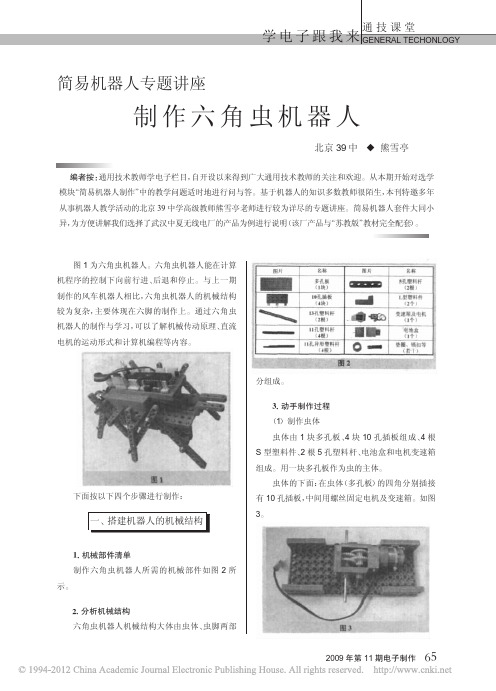
图4
(2)制作虫脚 先来制作六角虫机器人一侧的脚。一侧的脚由 2 根 11 孔塑料杆、2 根 11 孔异形塑料杆、1 根 13 孔塑料杆、1 个 L 型塑料件组成。需要提醒大家的是 机器人的脚由于经常活动,使用普通螺丝易脱落,这 里使用防松螺母。制作后如图 5。
们将另一侧的虫脚也安装到虫体上。 (4)安装触角 最后为了使六角虫机器人能区分出运动的前后
在一个平面中运动。
3. 调整垫圈,使脚在一个平面内运动。
程度不断调整,直到适度的 状态。
表 1 是六角虫机器人 可能出现的问题及解决方
1. 电机引线接触不好或与电机驱动 1.将电机引线连到电机驱动板的正确位置
电机不转 板连接错误 2. 将电机驱动板连到主板的正确位置
2. 电机驱动板与主板连接错误
1.检查是否使用防松螺丝固定脚的部件1. 将普通螺丝换成防松螺丝
1. 机械部件清单 制作六角虫机器人所需的机械部件如图 2 所 示。
2. 分析机械结构 六角虫机器人机械结构大体由虫体、虫脚两部
2009 年第 11 期电子制作 65
通技课堂
学 电 子 跟 我 来 GENERAL TECHONLOGY
虫体的上面:连接有四根 S 型塑料件,用于限 定脚的活动范围。还连接有两根 5 孔塑料杆,用于 固定电池盒。最后将电池盒固定在 5 孔塑料杆上。 如图 4。
六角虫机器人出现的问题 大多集中在脚部。我们要确 保脚部各个部件连接正确 并将各个部件之间的松紧
灯不闪烁 2. 电脑串口选择不对 1.检查脚部连接是否正确
脚 不 动 或2. 固定脚的防松螺丝是不是太紧
2. 换一个串口再试 1. 正确连接 2. 调整防松螺丝,将部件之间连接程度
动作缓慢 3. 检查垫圈薄厚是否合适,是否使脚放松些
arduino仿生六足机器人教材
仿生六足机器人教材———基于Arduino开发平台V1.0目录一、机器人的组装 (1)1.1. 组装工具 (1)1.2. 装配步骤 (1)二、系统概述 (10)2.1.arduino介绍 (10)2.2.Arduino驱动安装 (13)2.3.Arduino IDE菜单介绍 (20)三、实验操作 (25)3.1 红外避障实验 (25)3.2 舵机实验 (27)四、使用说明 (31)4.1.接线端口介绍 (31)4.2.操作说明 (32)一、机器人的组装1.1. 组装工具工具:尖嘴钳、十字螺丝刀等。
1.2. 装配步骤1)首先是准备好机体2)在机体上装配4个M3X15mm的六棱铜柱,所用到4个M3X8mm的螺钉如下图所示:我这里为了方便能够清楚看到螺钉与铜柱的连接把它分开了。
4)下一步就是装两个模拟舵机和付板,所用到八个螺钉,八个螺母如下图所示1是分解装配6)这一步是两个十字舵盘的安装,这里用到两个M3X6mm的螺丝8)组装M3X20mm、M3X25mm的六棱铜柱,这里中间部位是两个M3X20mm六棱铜柱,两侧是M3X25mm的六棱铜柱,用到M3X8mm 的螺丝10)中间脚的组装,M3X20螺丝、M3螺母、钢纸垫片11)组装连接杆12)另一个连杆组装13)两侧脚组装,这里用到M3X8螺丝、M3螺母、钢纸垫片14)固定完成15)中间脚上部螺丝的固定,这里用到M3X8螺丝、钢纸垫片二、系统概述2.1.arduino介绍要了解arduino就先要了解什么是单片机,arduino平台的基础就是A VR指令集的单片机。
1、什么是单片机?它与个人计算机有什么不同?一台能够工作的计算机要有这样几个部份构成:中央处理单元CPU(进行运算、控制)、随机存储器RAM(数据存储)、存储器ROM(程序存储)、输入/输出设备I/O(串行口、并行输出口等)。
在个人计算机(PC)上这些部份被分成若干块芯片,安装在一个被称之为主板的印刷线路板上。
昆虫机器人diy详解
昆虫机器人diy详解
一、基本原理
本项目的机器人依靠带偏心摆锤的震动马达发出的震动波进行移动。
本项目虽然驱动原理比较简单,但是由于造型的差异其实分成了三款不同的机器人(分别是Ⅰ型、Ⅱ型、Ⅲ型),而且由于结构的不同也导致运动的规律和效果有所不同。
在开始的时候只是实现了基本的随着震动做不规则运动的效果,后来的升级版本中同时也给后面的Ⅱ型和Ⅲ型两款额外增加了一对会发光的眼睛。
1、驱动原理
本项目机器人的动力依靠的是震动波,即用震动器带动整个机器人身体发生震动,在机器人的重量较轻,且支撑不是很平稳的时候,机器人就会发生位置的移动。
这里所谓震动器,其实就是我们手机中实现震机的震动马达,其原理就是通过旋转的马达带动一个位于偏心轮上的摆锤,由于摆锤的重心是位于旋转的轴上的一边,在马达转动的过程中,就会由于摆锤的重量不断循环的在转轴的周围产生一个离心的外力(即:交替忽上忽下、忽左忽右的摆动),从而导致马达的震动。
下图中左边的两个震动马达是在普通马达上接了偏心摆锤,而右边扁平的其实把马达和摆锤融为一体了,效果其实相当于左边马达竖着放而已,只不过结构更紧凑了。
本项目的Ⅰ型和Ⅱ型采用的是扁平的震动马达,而Ⅲ型采用的是普通的震动马达。
扁平震动马达的震动(幅度)效果不如普通的震动马达,但是扁平震动马达的消耗电流小,有着更强的续航能力可以持续运动的时间更长。
2、电路原理
本项目的电路非常简单,只是一个简单的电学电路,稍微有点物理电学知识的人都可以制作出来。
昆虫机器人制作方法
昆虫机器人制作方法
制作昆虫机器人的方法有很多种,通常包括以下几个步骤:
1. 设计,首先需要设计昆虫机器人的外形和结构,包括身体、腿部、感知器官等部分的布局和形状。
2. 材料选择,根据设计要求,选择合适的材料,比如塑料、金属、电子元件等,用于制作机器人的外壳和内部零部件。
3. 机械结构制作,根据设计图纸,制作机器人的机械结构,包括连接杆、关节等部件,通常需要使用3D打印、铣削、激光切割等技术。
4. 电子元件安装,将电机、传感器、控制器等电子元件安装在机器人内部,并进行连线和焊接。
5. 编程控制,编写控制程序,使机器人能够根据传感器获取的信息执行相应的动作,比如行走、转向、感知环境等。
6. 测试调试,对机器人进行测试,调试程序和机械结构,确保
其能够正常运行。
需要注意的是,制作昆虫机器人需要具备机械设计、电子技术、编程等多方面的知识和技能,因此在制作过程中可能需要多个领域
的专业人士合作。
六足机器人的制作(模拟电路DIY项目)
模拟电路DIY项目报告基于单片机控制的多关节仿生机器人题目基于单片机控制的多关节仿生机器人姓名肖翔天(组长) 贾潇郑家雄雄杨波闵浩迪张鸣远赵政舒张泽中专业电子工程学类指导教师张利君王小静基于单片机控制的多关节仿生机器人摘要:随着人类探索自然界步伐的不断加速,各应用领域对具有复杂环境自主移动能力机器人的需求,日趋广泛而深入。
理论上,足式机器人具有比轮式机器人更加卓越的应对复杂地形的能力,因而被给予了巨大的关注,但到目前为止,由于自适应步行控制算法匮乏等原因,足式移动方式在许多实际应用中还无法付诸实践。
另一方面,作为地球上最成功的运动生物,多足昆虫则以其复杂精妙的肢体结构和简易灵巧的运动控制策略,轻易地穿越了各种复杂的自然地形,甚至能在光滑的表面上倒立行走。
因此,将多足昆虫的行为学研究成果,融入到步行机器人的结构设计与控制中,开发具有卓越移动能力的仿生机器人,对于足式移动机器人技术的研究与应用具有重要的理论和现实意义。
在此我们对一种基于单片机控制的多关节仿生机器人——六足机器人进行研究。
其地形适应能力强,具有冗余肢体,可以在失去若干肢体的情况下继续执行一定的工作,适合担当野外侦查、水下搜寻以及太空探测等对自主性、可靠性要求比较高的工作。
关键词:六足机器人,运动,结构设计,红外避障Abstract:With the increasingly rapid step of human exploration of nature, the demand for robots with autonomous mobility under complex environment has been getting broader and deeper in more and more application areas. Theoretically, legged robot offers more superior performance of dealing with complicated terrain conditions than that provided by wheeled robot and therefore has been given great concern, however up to now, for the reason of absence of adaptive walk control algorithm, legged locomotion means still could not be put into practice in many practical applications yet. While on the other hand, as the most successful moving creature on the earth, multi-legged insect has facilely managed to surmount various complex natural landforms and even to walk upside down on smooth surfaces by right of its sophisticated limb structure and dexterous locomotion control strategies. Accordingly, it contains great theoretical and practical significance for the research and applicationof legged mobile robotics to blend the behavioral research effort of multi-legged insect into the mechanical design and control of walking robot and furthermore to develop hexapod biomimetic robots with more superexcellent mobility.Hexapod robots have strong abilities to adapt the terrain, and have redundancy in the legs, so they can go on carrying out jobs in the case of losing some legs. They are suit for tasks which have strict demands for independency and reliability such as spying in the wild, searching underwater and exploring the outer space.Key words:Hexapod robot,movement,mechanical design,infrared obstacle avoidance1.六足机器人的背景与介绍目前,用于在人类不宜、不便或不能进入的地域进行独立探测的机器人主要分两种,一种是由轮子驱动的轮行机器人,另一种是基于仿生学的步行机器人。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
木质六足爬虫机器人制作全过程(多图)
首先在电脑上做好设计
[tr][/tr][td][/td]
复合板:3mm厚,51*30cm
[tr][/tr][td][/td]
使用切边机可以极大的提高工作效率
[tr][/tr][td][/td]
我想我如果没有切边机的帮助的话说不定这个项目可能就中途夭折了。
[tr][/tr][td][/td]
非常漂亮和精确的加工 [tr][/tr][td][/td]
用切边机可以轻易的从整板上得到想要的零件,又快又容易[tr][/tr][td][/td]
机器人的六条腿都是这样得到的。
[tr][/tr][td][/td]
腿部细节
[tr][/tr][td][/td]
另一个角度
[tr][/tr][td][/td]
主体部分由8个伺服电机组成,六个用来控制腿,还有两个用来控制头部的活动。
[tr][/tr][td][/td]
那些洞是用来布线用的。
[tr][/tr][td][/td]
然后把底盘像这样粘起来[tr][/tr][td][/td]
装好伺服电机的腿部。
[tr][/tr][td][/td]
我在一家小的航模商店里找了好几次才找齐了我想要的各种小部件。
[tr][/tr][td][/td]
检测一下,当伺服电机运动到中部时,腿也运动到中间位置,非常好。
其余的运动将在软件中调整。
[tr][/tr][td][/td]
俯视图
[tr][/tr][td][/td]
看起来不错,但是开始的时候做的很慢很不稳。
[tr][/tr][td][/td]
稍微调整了一下就好多了。
[tr][/tr][td][/td]
微控制器我用的是Atmel AT90S8515,主频为8MHz,编译器用的是WinAVR GCC GNU-C [tr][/tr][td][/td]
[tr][/tr][td][/td]
我的六腿爬行者!
我的爬行者现在改良多了,腿部在抬起的时候更垂直,这样可以免于陷于地毯或是其他的什么东西中。
[tr][/tr][td][/td][tr][/tr][td][/td]
腿部在抬起和落下时的位置。
[tr][/tr][td][/td]
现在我给它加了一个PlayStation的手柄,这样我可以在机器人行走的过程中随时的更改伺服电机的控制参数,方便测试。
[tr][/tr][td][/td]
这是一个九针的插口。
[tr][/tr][td][/td]
电池安装于底盘上。
[tr][/tr][td][/td]
这个简单的电路是用来无功耗的将电池供电从9V转到5V的。
[tr][/tr][td][/td]
在电脑上画出头部的设计图。
[tr][/tr][td][/td]
切割好的头部所需零件。
[tr][/tr][td][/td]
组装好的头部。
[tr][/tr][td][/td]
下一步我打算装上摄像头和距离传感器,并且开发一些新功能。