江南OSD飞控使用指南
OSD产品说明书_V1.0(1)
零度OSD产品说明书V1.0零度智控(北京)智能科技有限公司产品简介零度OSD是零度智控(北京)智能科技有限公司(注:以下简称零度)为多旋翼爱好者、航拍从业者推出的多轴飞行器配套产品。
该产品适用于零度全系列飞行控制器,能够在视频中实时叠加飞行参数,帮助飞行器操控者及时掌握机体相关数据并完成高质量的飞行,带来更为人性化的操控体验。
该产品外形美观,质量轻盈,材质坚固。
设备图解1图传发射机电源及A V信号线,可用于给图传发射机提供5V电压。
红线为电源正极,黑线为电源负极,白线为AV信号输出。
2摄像头电源及A V信号线,可用于给摄像头提供5V电压。
红线为电源正极,黑线为电源负极,白线为AV信号输入。
3Wifi(电台)电源线,可用于给Wifi电台提供5V电压。
红线为电源正极,黑线为电源负极。
4串口数据输出线,该线连接Wifi(电台)数据输入口。
5串口数据输入线,该线连接飞控串口数据输出口。
6OSD主电源线,该线连接飞行器主电源,兼容2S~6S电池。
7模式切换按键及模式指示灯。
8Micro-SD卡插槽使用方法一、屏幕叠加画面图解1兴趣范围半径(单位:M)2飞行时间3电压报警,无符号显示为无报警;符号闪烁为一级报警,符号常规显示为电压二级报警。
4内存卡状态指示,无符号显示为已插入内存卡;符号常规显示为未检测到内存卡。
5串口状态指示,用于指示OSD与飞控之间串口连接状态,符号闪烁为串口数据异常,无符号显示为串口数据正常。
6实际油门舵量指示,游标表示飞控实际输出油门控制量,标尺底部为游标零点,标尺旁数值表示油门具体数据。
7返航指示符,当机尾对准起飞点时,返航指示符位于十字标竖线正下方,同时返航指示符由小三角变为大三角符号,此时遥控器收杆飞行器将朝起飞点所在方向移动;机尾方向较起飞点偏移越大,返航指示符偏离十字标竖线越远。
此处起飞点指飞行器上电后获取6颗GPS卫星时飞行器所在地点。
(该功能只在GPS模式下且存在有效GPS坐标时有效)8已设置的航点数量9当前目标航点序号10飞行器水平速度(单位:KM/h)11飞行器距起飞点高度(单位:M)12保留13飞行器距起飞点水平距离(单位:M)14动力电流值(单位:A)15当前GPS卫星数量16晃动系数17震动系数18飞行器俯仰角指示符19飞行器横滚角指示符20飞行器升降状态指示,箭头向上表示飞行器处于拔高状态,箭头向下表示飞行器处于拉低状态,箭头的长度指示拔高或者拉低速度概值。
U22说明书

U22 –固定翼航模智能飞行控制器U22 – Autopilot With Artificial Intelligence使用说明书1.0版本Instructions Version 1.0 April 2015U22介绍 (2)OSD界面参数 (3)飞控的输入输出接口 (6)全部设备连接实物图 (7)电源的连接 (8)接收机的连接 (10)GPS模块的连接 (11)舵机的连接 (11)空速管的连接 (12)飞控在飞机的安装 (12)飞控模式的控制和转换 (13)飞控的设置 (15)确定平衡模式舵面反馈方向 (18)常见问题 (19)注意事项 (20)1智能∙适用所有固定翼- 正常布局, V尾布局,飞翼。
∙八大飞行模式- 起飞模式,平衡模式,航点模式,定高定向模式,定点盘旋模式,自动返航模式,围栏模式,手动模式。
∙智能化控制-自动油门、自动滑降避免飞机失控简洁∙简洁的接线-支持3线串行连接PPM模式接收机,并可同步传输RSSI数据。
在OSD上显示遥控信号强度。
∙中文加图标- OSD界面简单易懂。
∙免电脑调参-使用遥控器即可在OSD界面上完成所有设定。
安全∙多项安全功能-自动设定起飞位置,一键返航,失控返航,围栏返航,返航高度保持。
∙失速保护功能-空速探测,自动油门,自动调整俯仰状态避免飞机进入失速螺旋。
∙显示飞行总结-每次飞行结束,自动显示飞行最高,最快,最远,累计航程、飞行次数。
8大飞行模式让你自由飞翔∙起飞模式 - 设定起飞仰角,飞机弹射起飞后,延时启动动力。
∙平衡模式 - 保持飞机水平姿态飞行。
∙航点模式 - 按照起飞前设定的航路飞行。
∙定向定高模式 - 保持高度和方向飞行。
∙定点盘旋模式 -飞机按照100米半径盘旋飞行,盘旋方向可控。
∙自动返航模式 - 自动按照设定的高度返回起飞点。
∙围栏模式 - 超过设定距离,自动返航。
∙手动模式 - 全手动飞行,享受飞行乐趣。
2OSD界面参数飞行参数界面飞行结束后,显示飞行记录3飞机坐标-U22飞控显示的经纬度坐标是GPS最常用的DD.DDDDD格式。
OSD FPV版使用指南
把新的参数保存后,再次起飞,飞到一定的高度后,把六通道打到高,进入定高飞行模式。 如果高度、速度能维持,说明参数设置 OK 了,就可把六通道打到中,五通道打到高,测试自动 返航了。如果有意外,或者是返航完成后,把五通道打到 低 ,退出自主模式,六通道保持 中 ,以 辅助模式降落。 七、电子指南针
通道接右副翼。 5.通道正反:把遥控器的一二四居中,三打到最低。把六通道打到中,切到辅助模式。
抬起左翼时,左副翼应上抬。否则改变参数中通道一的正反状态。 抬起尾部时,升降舵应上抬。否则改变参数中通道二的正反状态。 机尾顺时针摆动,尾舵应顺时针转动。否则改变参数中通道四的正反状态。 上面三步设置好飞机内部的控制逻辑后,再动遥控器的摇杆,设置遥控器的正反。除三通道外, 遥控器的一二四都应该是 NORMAL。 6.通讯:选择 GPS 和数传的通讯速率。保存,重启飞控板生效。
二、各参数的说明:
序号
名称
0,1,2,3 ,4,6
各通道增益值
5
联动系数
7
方向限定值
8
油门最大值
9 10 11 12 13
14,15
油门平飞值 电压校正系数 安全高度 加速度系数 接近距离 俯仰和倾斜限 定值
17,18 副翼和升降 D
19
偏航 P
20
偏航 D
21
空速校正系数
22
速度设定值
23
气压计修正系 数
36
调整气压计的读数与实际海拨值一致,取值范围为 -200…+200,单位为 m
0
与各飞行模式相关的参数:
江南OSD飞控使用指南

目 录1、飞控快速上手 (1)2、串口、数传、蓝牙 (10)3、地面站 (13)4、433控核心板 (18)5、在线升级 (23)6、757装机实例 (29)7、常见问题 (39)8、433M GP天线 (42)九轴+气压全姿态惯导江南OSD飞控快速上手一、OSD飞控的基本特点:(1)使用三轴陀螺,三轴加速度,三轴磁阻,气压计,ARM处理器。
(3)传感器校准,500hz全姿态运算,静态角度分辨率为0.1度,动态精度到1度,允许飞机做空翻,横滚,倒飞。
动态范围:2000度/秒。
(4)多重安全保护:看门狗确保飞机受控、失控返航、GPS失效自动重启、丢星惯导返航。
(5)OSD飞控仅35×46mm,重仅11克。
可直接连接6通以上接收机,也可通过433兆数传增程。
配2.5db天线和20dBm的数传,地空有效控制距离是5公里,若配以更好的数传和天线地空有效控制距离可达到20公里。
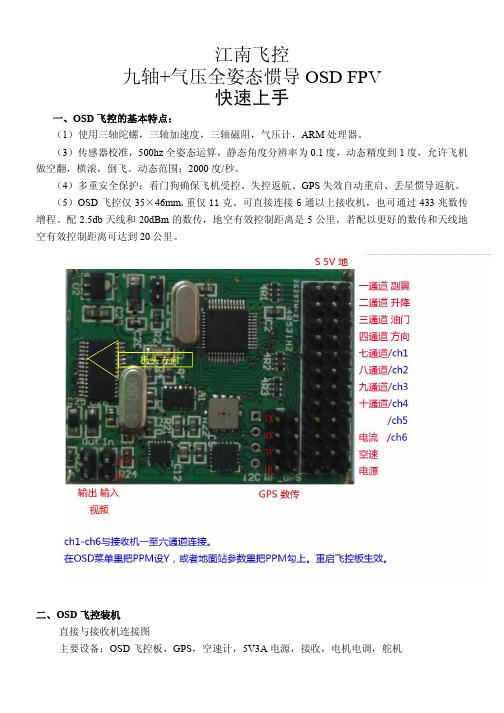
二、OSD飞控装机直接与接收机连接图主要设备:OSD飞控板,GPS,空速计,5V3A电源,接收,电机电调,舵机等433M增程模式,用数传控制飞机,同时通过数传回传飞行数据。
推荐以这种方式飞行,接线简单,距离远。
OSD飞控板,GPS,空速计,5V3A电源,数传,电机电调,舵机注意:飞控具有失控返航的功能,在测试时,务必把桨取掉,以防触发自动返航。
三、OSD菜单修改参数通电后,会出现5秒钟的初始等待界面。
期间把六通道从低打至中两次,回到低,即可进入设置菜单。
5秒初始等待界面:OSD菜单,需要保存时,六通道由低打中保存退出。
不需要保存时,由Exit退出图中的参数为飞控板默认的参数,适用大翼展的常规布局固定翼飞机。
*部分必须要根据自己的情况首飞时调整,辅助模式起飞后,观察油门和飞行速度。
*部分在第二次飞行前设好,然后可测试自主返航。
1.UseAi空速:当使用空速传感器时,设Y。
空速传感器在辅助定高模式、自主都起到重要作用,建议装上。
F2说明书
飞控使用说明飞控OSD显示界面数据定义:OSD数据解释:飞机所在位置方位角:指飞机相对于起飞地点,现在所处的位置,如:,指飞机现处于相对于飞起地点正南方向(正北为0度,180度为正南)。
飞机前进方向:指飞机现在正在前进的方向,如:,指飞机正在向53度的方向(正北为0度)前进。
飞机返航角度:指飞机当时回家的偏差角度,如,指飞机向左53度,为回家的方向。
再如:,指飞机现在向右68度,为回家的方向!返航角度是最重要的数据之一!尤其要注意。
直线距离:指飞机距离回家位置的地面直线距离,单位是米。
高度:相对于“家”的位置的相对高度。
单位是米。
航程:飞机累计飞行距离。
T: 飞控油门大小,此数值与设置里的最低油门相一致,便于飞行时候判断油门大小RSSI:这个是飞控RSSI接线端口的电压值,单位为0.1V,测量电压范围为0-3.3V。
如显示R32,则表示电压为3.2V。
这个端口常用于连接接收机场强段,以显示接收机信号的好坏情况,如果是433接收机,则显示的是丢包率,电压3.2(或者3.3)为信号100%接收,0为失控。
根据这个数值,可以看出接收机的状况。
飞机姿态:显示的是飞机俯仰的角度和左右倾斜的角度,根据向小飞机的图标,可以看出飞机实时姿态。
如,表示飞机右倾3度,飞机机头向下1度。
起飞计时器:当油门超过30%后,保持1秒以上,计时器就开始计时。
当开始计时后,设置模式就进不去了,必须重新接电,在计时器没有开始计时前,才能进入设置模式。
北京时间:指飞行的时间,可以用于记录。
雷达:中间表示“家”的位置,小飞翼表示飞机,飞翼的方向表示飞机前进的方向。
雷达屏幕上,上北下南左西右东,表示飞机做处的位置。
角度说明图:OSD设置界面定义:飞控主板接线定义:板子上标注"G"的是地线!图传摄像头电源输入端经过电感电容滤波后,输出到两个图传摄像头电源输出端。
所以图传摄像头电源输入端电压输入多少伏,图传摄像头电源输出端就输出多少伏电源,内部经过了LC滤波。
UP30飞控使用说明书

UP30通用无人机自驾系统使用说明书目录警告、保修与升级 (4)警告 (4)保修 (4)升级 (4)联系 (5)UP30飞控系统简介 (6)机载飞控系统 (7)简介 (7)特点 (7)物理参数 (9)使用环境 (9)电源 (9)系统框图 .................................................................................................................. 错误!未定义书签。
接口连接图(见最后一页) (10)飞控盒安装 (11)电源 (13)遥控接收机 (14)遥控器设置 (15)飞行控制模式 (16)舵机 (18)GPS (19)数传模块 (21)空速管 (21)气压高度计 (21)转速传感器 (22)停车开关 (22)风门的设置 (23)陀螺 (23)机载飞控安装检查 (24)地面站软件 (26)简介 (26)系统最低配置 (26)界面介绍 (27)设置对话框 (30)照相 (39)云台控制 (42)捕获操作 (44)下传数据 (44)PID通道 (48)地图操作 (52)航线 (58)自动航线生成 (61)制式航线 (62)导航方式与导航逻辑 (64)工具 (66)起飞前检查 (66)飞行控制 (67)CPV飞行控制 (68)任务控制 (69)飞行记录与回放 (70)报警 (70)文件与文件夹 (71)飞行操作 (72)紧急情况处理 (73)实现自控飞行步骤 (75)试飞的项目: (75)警告、保修与升级警告UP30系统禁止用于任何非法的用途,本公司对因非法使用引起的后果不承担任何责任;不承担由于使用本系统产生的第三方责任。
本说明具有版权,受著作权保护,任何人不得随意修改、摘抄、发表。
本说明有可能与实际功能存在出入,不保证文中没有错误,也有可能会因为各种原因改变,有可能在不做通知的情况下修改。
OSD使用步骤和注意事项2015-6-29

2015-6-28
OSD功能测试步骤:
1、接线:飞控COM口的TX、RX接OSD的RX、TX,摄像机的视频信号、地接OSD的AV_IN、
GND,OSD的AV_OUT、GND接液晶屏,飞控CHx口的5V、GND接OSD的5V、GND,电源模块接飞控的POW口。
2、打开摄像机,使摄像机输出视频信号。
3、给电源模块上电,如果液晶屏有字幕叠加的图像,同时字幕上的数据有变化,则表示
OSD运行正常。
4、通过USB单独给OSD供电,如果在设备管理器里能看到正确安装驱动,则表示OSD的
BootLoader正常。
5、步骤3和步骤4通过,则OSD功能测试通过。
注意:先打开摄像机,使摄像机输出视频信号,视频信号输入到OSD,然后才能给OSD 上电,OSD才能自动识别PAL制式和NTSC制式。
提示:如果直接上电后没有osd信息叠加,请将osd的5v供电线断电再重新上电即可,后期可通过USB升级方式解决,请各位玩家勿小题大做。
飞控使用简单说明
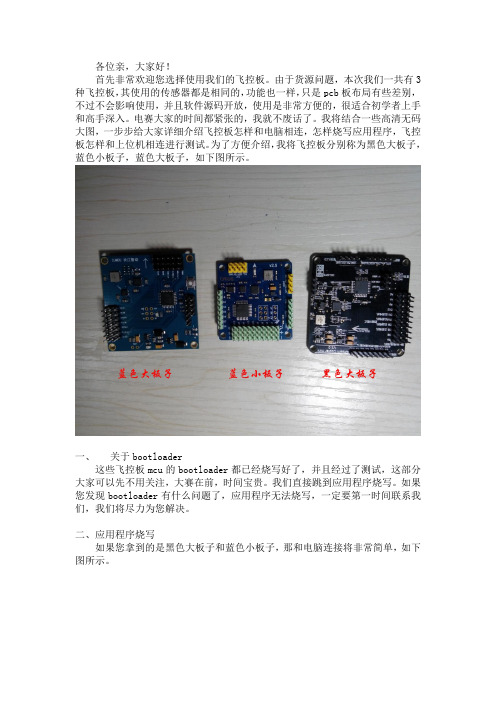
各位亲,大家好!首先非常欢迎您选择使用我们的飞控板。
由于货源问题,本次我们一共有3种飞控板,其使用的传感器都是相同的,功能也一样,只是pcb板布局有些差别,不过不会影响使用,并且软件源码开放,使用是非常方便的,很适合初学者上手和高手深入。
电赛大家的时间都紧张的,我就不废话了。
我将结合一些高清无码大图,一步步给大家详细介绍飞控板怎样和电脑相连,怎样烧写应用程序,飞控板怎样和上位机相连进行测试。
为了方便介绍,我将飞控板分别称为黑色大板子,蓝色小板子,蓝色大板子,如下图所示。
一、关于bootloader这些飞控板mcu的bootloader都已经烧写好了,并且经过了测试,这部分大家可以先不用关注,大赛在前,时间宝贵。
我们直接跳到应用程序烧写。
如果您发现bootloader有什么问题了,应用程序无法烧写,一定要第一时间联系我们,我们将尽力为您解决。
二、应用程序烧写如果您拿到的是黑色大板子和蓝色小板子,那和电脑连接将非常简单,如下图所示。
如果您拿到的是蓝色大板子,连线要稍微麻烦一点点,不过也只是一点点啦,要相信自己,都是要参加比赛的人了,这些都小case了,so easy,哪里不会点哪里,麻麻再也不会担心我不会写程序了O(∩_∩)O~~如下图所示,编程器的+3.3v排针不接,然后从上往下依次是DTR接飞控板的DTR,TX接飞控板的RXD,RX接飞控板的TXD,+5V接飞控板的+5V,GND接飞控板的GND,是不是很简单^-^连接成功以后可以通过设备管理器查看端口号。
打开解压我们提供的资料,安装Arduino IDE 开发环境。
然后打开MultiWii_2_0.ino文件(存储路径\MultiWii_2_0\MultiWii_2_0\ MultiWii_2_0.ino),界面是酱紫的。
点击菜单栏的Tools 选项,在Board项中选择Arduino Pro or Pro mini/ATmega328(不能选择上面的Aduino Duemilanove w/ATmega328哦,有童鞋就因为选择了这个,结果两个板子都不能烧写然后打电话说我们的东西有问题,o(╯□╰)o)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
九轴+气压全姿态惯导江南OSD飞控目 录1、飞控简介 (1)2、装机 (2)3、调节参数 (5)4、地面测试 (8)5、试飞 (9)6、空速、电流传感器、电源模块、GPS (10)7、串口、数传、蓝牙 (13)8、地面站 (16)9、433控 (22)10、在线升级 (31)11、757装机实例 (37)12、常见问题 (47)13、433M GP天线 (50)14、自动跟踪天线 (51)飞控简介OSD飞控的基本特点:当使用433控方式连接时,PPM应设N,此时可接入电流传感器。
(1)使用三轴陀螺,三轴加速度,三轴磁阻,气压计,ARM处理器。
(2)传感器校准,500hz全姿态运算,静态角度分辨率为0.1度,允许飞机做空翻,横滚,倒飞。
动态范围:2000度/秒。
(3)多重安全保护:看门狗确保飞机受控、失控返航、GPS失效自动重启、丢星惯导返航。
(4)OSD飞控仅35×46mm,重仅11克。
直接连接6通接收机时,输出四路舵机信号。
以433方式连接时,输出10通舵机信号。
(5)支持电流传感器,空速传感器。
(6)支持双轴增稳云台。
(7)可通过地面站调节参数、航点,实时显示飞行轨迹。
(8)独特的双向433控,遥控器可自带OSD飞行数据显示屏。
配2.5db天线和20dBm的数传,地空有效控制距离可达5公里,若配以更好的数传和天线地空有效控制距离可达到20公里。
装机(一)直接与接收机连接图主要设备:OSD飞控板,GPS,空速计,5V3A电源,接收,电机电调,舵机等(二)433M模式,用数传控制飞机,同时通过数传回传飞行数据。
推荐以这种方式飞行,接线简单,距离远。
OSD飞控板,GPS,空速计,5V3A电源,数传,电机电调,舵机433板的使用方法见:433控章节。
注意:飞控具有失控返航的功能,在测试时,务必把桨取掉,以防触发自动返航。
(三)设备布局:数传,图传功率从100mW至1W 不等,应注意布局:1:数传和图传的线上,可穿上磁环。
2:数传的天线应加上地网。
飞机上的数传应使用GP天线,地面的数传至少要使用GP天线。
使用高增益的吸盘天线,距离更远。
3:数传,图传,GPS,应保持足够的距离。
例:25cm以上。
空速传感器的线应尽量与图传线和数传线独立开,避免并在一起。
4:飞控板上有三轴的电子指南针,对磁性物体敏感,应与电机、开关电源模块等有磁性的物体拉开一定的距离,以免影响指南针方位。
通常这个距离在5-10cm。
(四)调节舵面:设备装完后,可通电调节舵面(电机不要装桨):1:遥控器先关闭,飞机放平,飞控通电后,一、二、四通道会输出标准的中点信号。
2:调节舵面拉杆,让舵面位置准确。
3:然后再打开遥控器,检查舵面是否有明显变化。
如果有,说明遥控器相应通道的输出没有在标准中点上。
调节微调补偿。
4:六通道打到中,切到辅助模式,此时各舵面也应该无明显变化。
5:以上步骤仅在调机时使用。
在以后的飞行中,应养成先开控,后给飞机通电的好习惯。
调节参数一、通过地面站调参:这是最方便快捷的调参方式,建议通过地面站调参。
详见地面站一章。
二、通过OSD菜单调参:在外场,又不想带电脑时,可通过OSD菜单应急调参,可调节部分关键参数:通电后,会出现5秒钟的初始等待界面。
期间把六通道从低打至中两次,回到低,即可进入设置菜单。
5秒初始等待界面:OSD菜单,需要保存时,六通道由低打中保存退出。
不需要保存时,选<退出>CH1-CH4:舵机通道一至通道四。
N:正, R:反.操作:二通道上下移动光标,修改数据。
四通道右打进入选项,左打退出选项。
1.空速:当使用空速传感器时,设Y。
空速传感器在辅助定高模式、自主都起到重要作用,建议装上。
2.PPM:当直接与接收机连接时,设Y,保存,重启飞控板生效。
3.NTSC:如果是NTSC格式的视频,设Y。
保存,重启飞控板生效。
4.飞翼:装备飞翼时,设Y。
保存生效。
横滚增益与俯仰增益可适当调小,1通道接左副翼,2通道接右副翼。
5.通道正反:把遥控器的一二四居中,三打到最低。
把六通道打到中,切到辅助模式。
抬起左翼时,左副翼应上抬。
否则改变参数中通道一的正反状态。
抬起尾部时,升降舵应上抬。
否则改变参数中通道二的正反状态。
机尾顺时针摆动,尾舵应顺时针转动。
否则改变参数中通道四的正反状态。
上面三步设置好飞机内部的控制逻辑后,再动遥控器的摇杆,设置遥控器的正反。
6.通讯:选择GPS和数传的通讯速率。
保存,重启飞控板生效。
7.空速清零:空速传感器和电流传感器通过<空速清零>或者地面站设置里点“电流空速”<清零>设置零位。
当使用433M控方式控制飞机时,PPM应设到N,这时方可接入电流传感器。
以433控方式飞行时,如果PPM设了Y,同时飞行中空速速度又为0,插入的电流传感器会影响飞控板工作!8.传感器校准:地面检查时,如发现姿态有漂移,或者气温有明显变化(例:温度变化>20度),应对传感器校准。
校准时,把飞机放平,通过<传感器校准>进入,等待10秒,直到姿态数据恢复显示。
三、模式切换表:建议五六通道使用三段开关控制。
通道状态飞行模式满足条件低:<1400us 手动模式中:1400 us -1600us 辅助模式六通道高:>1600us 定高模式油门>15%低:<1400us 自动关闭中:1400 us -1600us 自动飞行地面站先点<自动>授权五通道高:>1600us 返航飞行飞行速度>20km8、通道连接表,5,6通道内部使用,未外输出。
通道一通道二通道三通道四通道五通道六通道七通道八通道九通道十1通道副翼2通道升降3通道油门4通道方向7通道/ch18通道/ch29通道/ch310通道/ch4备用/ch5电流/ch6地面测试测试前把飞机固定好或者把桨拨掉。
1、通过<空速清零>(如果未安装空速计,跳过),设置电流和空速传感器零位。
这时,速度数字会有几个字的变化,是正常的。
轻吹空速管,就有速度指示。
推油门,应有电流指示。
2、六通道打到中,辅助模式,倾斜或摆动机身,检查各舵面反应是否正确。
3、定高模式检查:把六通道打到高,推油门到15%多一点,这时油门会突然大增,飞控接管油门和升降通道。
把六通道打到中,退出定高模式。
4、返航模式检查:(1)五通道直接打到高。
对着空速传感器轻吹,让速度高于20km/h,飞机立即进入自动返航飞行模式。
如果地面站参数选项里把“<10km关油”选上,停吹,让空速小于10km/h五秒后,油门会关闭。
五通道打至低退出。
(2)当飞控直接与接收机连接时,接收机需要进行失控设置,失控时,五通道输出为高。
关控数秒,飞机即进入失控自动返航模式。
五通道打至低,开控,即退出自动模式。
注:五、六通道的状态,可观察屏幕上的提示:L低,M中,H高。
未使用空速传感器时,地面测试无法进入自主返航模式,只需观察五通道能在L,H间切换即可。
确保五通道能在高、低时之间切换,在自动模式有意外情况发生时,能切低,回到辅助或者手动模式飞行。
试飞一、减震:三轴加速度传感器对震动非常敏感。
在屏幕右下方有震动指数值。
把动力开在最大时,观察此值。
如果震动值超过100,应通过减震盒,桨配平衡,电机座加强等方式,让震动值降下来。
二、设返航点:在GPS定位后,在1.5秒内把六通道从低打向中三次,回到低,设置返航点。
设置成功后,屏幕上会提示“返航点”。
速度低于10km/h 时,方能设置。
成功设置返航点后,距离和高度会清零。
(注意:通过六通道设置返航点后,通过地面站设的航点作废)三、辅助模式测试:六通道打到中,用辅助模式起飞(注意六通道别打过头,打到高了,定高模式飞机飞不起来的)。
起飞后,先在视距内飞行。
方向舵置中时,微调副翼,让飞机能平直的飞行。
记录下平飞时油门值和飞行的速度,填到参数里。
辅助模式飞行中,如果机翼左右抖动,应减小副翼P。
如果尾巴出现金鱼尾的现象,则减小方向P。
如果尾巴上下摆,则减小俯仰P。
四、定高模式测试:把新的参数保存后,再次起飞,飞到一定的高度后,把六通道打到高,进入定高飞行模式。
定高时,如果高度不断下降,则需要立即把五通道打到中,退出定高模式。
否则有可能导致速度低而失速。
这时需要把速度设定值增大一点。
五、自主返航模式测试:如果定高模式正常了,可把六通道打到中,回到辅助模式,五通道打到高,测试自动返航了。
如果有意外,或者是返航完成后,把五通道打到低,退出自主模式,六通道保持中,以辅助模式降落。
在自主返航模式飞行时,如果航迹出现明显的S形,则需要调节偏航D。
过大和过小,都会导致航迹出现S形。
如果对偏离航线的距离有更高的要求,可适当调大偏航P,再耐心的调偏航D,让航迹成一条直线。
在自主返航飞行时,如果转弯半径过小,可适当减小联动系数、倾斜限定。
注意:在切自动返航模式飞行前,应把六通道打到中,回到辅助模式,再切自主。
因为在自主返航模式中,飞机将以安全高度飞行,在用五通道退出自主模式时,如果六通道在高位,将直接回到定高模式,有可能导致飞机加力爬升。
如果参数设置不当或者动力不足,会导致飞机爬升无力而失速。
自驾模式也需要同样注意。
六、自驾模式测试:在自主返航模式测试通过后,可通过地面站上传航点,测试自驾飞行。
地面站点“自动”,自动按钮变灰后,遥控器五通道切到中,即可进入自驾状态。
航点的设置请参见地面站章节。
空速、电流传感器、电源模块,GPS一、空速传感器的接线图空速传感器的5V供电要求稳定到mV级别。
在使用专用开关电源模块时,可把电调的5V供电单独给空速传感器供电。
注:MPXV7002DP对射频信号很敏感,容易受到图传等设备的干扰,导致零位发生变化。
因此,应按上图说明要求,使用屏蔽电缆。
屏蔽电缆的屏蔽层在传感器端与地相接。
飞控接头端的屏蔽层悬空。
同时用金属胶带或者其它措施,把传感器包裹起来接地。
处理好后,在打开和关闭图传设备时,空速计提示的速度变化有几个字,这是正常的。
空速管的动压管可用圆珠笔芯制,用软胶管(或者自行车的汽门芯管)连接至动、静压输入。
空速管安装在机翼或者机头前方,避开螺旋桨的气流。
静压如果不接,直接测舱内气压,有可能有较大的误差。
可参照下图自制或者购买:二、电流传感器电流传感器模块可测量50A的电流。
单独引出的线就是5V电源线,可提供5V稳压电源给空速传感器。
不得插到飞控板的5V端口上。
使用433控时,把PPM设N,插入到电流端口。
三、UBEC5V的开关电源模块用料足,输出纹波50mVpp,在输出线上穿磁环,与飞控板上的100UF钽电容构成LC滤波,纹波降到10mVpp左右。
能满足APC250,APC802对电源质量的要求。
在连接电源模块时,需注意单点接地,详见本指南中的“常见问题”。