无线传感器网络相对定位算法综述
无线传感器网络中的节点定位算法综述
无线传感器网络中的节点定位算法综述无线传感器网络(Wireless Sensor Network,WSN)是由大量分布在空间中的传感器节点组成的,这些节点可以通过无线通信进行数据传输和信息交换。
在WSN中,节点的定位是一项重要任务,它可以用来获取节点在空间中的准确位置信息,从而实现网络中节点位置相关的应用。
本文将对无线传感器网络中的节点定位算法进行综述。
一、节点定位的背景与需要节点定位在无线传感器网络中有着广泛的应用,例如环境监测、目标跟踪、灾难救援等。
在这些应用中,节点的准确定位是保证系统正常运行的基础,因此需要研究有效的节点定位算法。
二、无线传感器网络中的节点定位算法分类根据节点定位所依据的信息类型,可以将节点定位算法分为基于距离测量的节点定位算法和基于角度测量的节点定位算法。
1. 基于距离测量的节点定位算法基于距离测量的节点定位算法通过测量节点之间的距离来进行定位。
常用的方法包括信号强度测量、时间差测量和测距盲区法等。
- 信号强度测量:通过测量节点之间的信号强度来估计节点之间的距离。
这种方法简单易行,但受干扰较大,精度较低。
- 时间差测量:通过测量节点之间信号传播的时间差来计算距离。
这种方法精度较高,但需要时间同步,并且受到信号传播速度的影响。
- 测距盲区法:将节点视为环境中的一个参考点,通过测量节点到参考点的距离来进行定位。
这种方法不受时间同步限制,适用于大范围的节点定位。
2. 基于角度测量的节点定位算法基于角度测量的节点定位算法通过测量节点之间的角度来进行定位。
常用的方法包括方向角度测量和方位角测量等。
- 方向角度测量:通过测量节点之间的方向角度来计算节点之间的距离。
这种方法对节点间的相对定位较为准确,但需要角度测量设备。
- 方位角测量:通过测量节点相对于某个参考方向的方位角来进行定位。
这种方法不需要角度测量设备,但受节点密度和信号传播影响。
三、无线传感器网络中的节点定位算法研究进展随着无线传感器网络的发展,节点定位算法也得到了广泛研究。
无线传感器网络节点定位技术综述
无线传感器网络节点定位技术综述【摘要】无线传感器网络节点定位技术是无线传感器网络中的重要研究方向,通过准确的节点定位可以提高网络性能和应用效果。
本文首先介绍了全局定位技术和局部定位技术的概念及应用,然后详细讨论了基于声波、RFID和GPS的节点定位技术。
声波技术可以实现精准的节点定位,RFID技术适用于室内环境,而GPS技术在室外环境定位效果更好。
结合前文内容对无线传感器网络节点定位技术进行了总结,并展望了未来的发展趋势。
通过本文的阐述,读者可以了解节点定位技术的现状和各种应用场景,为进一步的研究和实践提供参考。
【关键词】无线传感器网络、节点定位技术、全局定位、局部定位、声波、RFID、GPS、总结、未来发展、趋势。
1. 引言1.1 无线传感器网络节点定位技术综述无线传感器网络节点定位技术是指通过各种技术手段实现对节点位置的准确定位,是无线传感器网络中的重要研究领域之一。
节点定位技术的研究不仅可以帮助用户实时感知环境信息,还可以提高网络性能和应用效果。
随着无线传感器网络的不断发展和应用需求的增加,节点定位技术也在不断创新和完善。
本文将对无线传感器网络节点定位技术进行综述,包括全局定位技术、局部定位技术、基于声波的节点定位技术、基于RFID的节点定位技术以及基于GPS的节点定位技术。
通过对各种技术的原理、特点和优缺点进行分析和比较,帮助读者更全面地了解无线传感器网络节点定位技术的现状和发展趋势。
通过本文的阐述,读者可以深入了解无线传感器网络节点定位技术的相关知识,并对未来的研究方向和发展趋势有一定的把握。
希望本文能够为相关领域的研究人员和工程师提供一定的参考和帮助,推动无线传感器网络节点定位技术的进一步发展和应用。
2. 正文2.1 全局定位技术综述全局定位技术是无线传感器网络中用来确定节点位置的重要技术之一。
全局定位技术通常利用已知位置的参考节点和距离信息,通过三边测量或多边测量的方法来计算目标节点的位置。
无线传感网络定位技术综述

无线传感网络定位技术综述无线传感网络(Wireless Sensor Network,简称WSN)是一种集成了传感、通信和计算功能的自组织网络,由大量低成本、低功耗的无线传感节点组成。
这些节点能够感知和测量环境中的各种参数,并将收集到的数据通过通信链路传递到基站或其他节点进行处理和分析。
无线传感网络在许多应用领域具有广泛的应用,其中一个重要的应用是定位。
无线传感网络定位技术是指通过使用无线传感节点间的信号强度、时间差或测向等信息来确定物体或节点在空间中的位置。
定位是无线传感网络中很重要的一个任务,它可以帮助用户获取节点的位置信息以及监测和追踪目标物体的移动。
无线传感网络定位技术的发展对于实现智能城市、智能交通以及环境监测等应用具有重要意义。
无线传感网络定位技术主要有三种方法,分别是基于信号强度的定位、基于时间差的定位和基于测向的定位。
第一种方法是基于信号强度的定位。
该方法通过测量无线信号在空间中的衰减程度来确定物体的位置。
常用的技术有收集多个节点间信号强度的RSSI值(Received Signal Strength Indication)并进行加权平均,采用指纹定位技术等。
这种方法简单易用,但存在信号衰减和多径效应等问题,导致定位误差较大。
第二种方法是基于时间差的定位。
该方法通过测量无线信号的传播时间来获得物体的位置。
常用的技术有Time of Arrival (TOA)、Time Difference of Arrival (TDOA)和Round Trip Time of Flight (RTOF)等。
这些方法对节点间的时间同步要求较高,且受多径效应和钟差等因素的影响,也容易引入较大的定位误差。
第三种方法是基于测向的定位。
该方法通过节点对目标物体的信号进行方向收集,进而估计目标物体的位置。
常用的技术有Angle of Arrival (AOA)和Received Signal Strength Angular Differential (RSSAD)等。
无线传感器网络定位算法综述
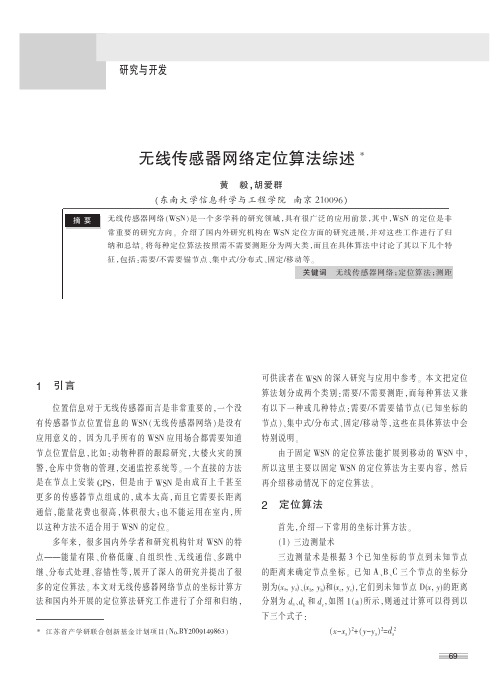
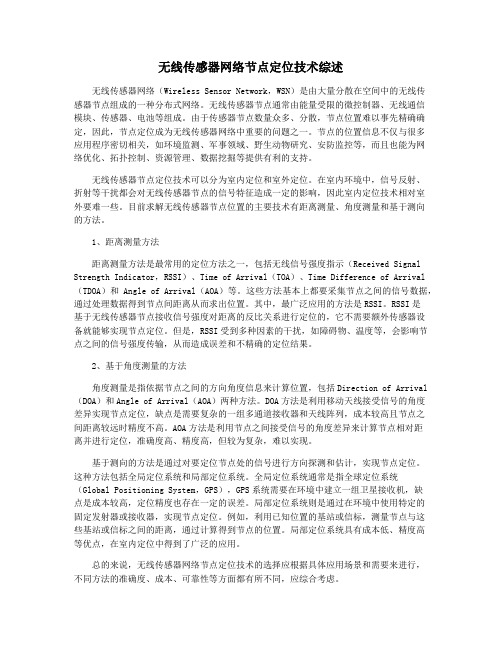
PAL650(MSSI 公司) TDOA
可达 1 英尺
世 界 上 第 一 个 FCC 认 证 的 基 于 UWB 的 活 动 RFID 跟 踪 系统
Sapphire DART UWB (MSSI 公 司 )
TDOA
好 于 30 cm(平 均 10 cm) 有 效 距 离 超 过 200 m
PinPoint 3D~iD
TOA
1~3 m
器 件 昂 贵 ,和 802.11 存 在 干 扰
Indoor GPS
AOA
1 mm
利 用 激 光 测 距 ,有 效 范 围 为 2~300 m,代 价 高
71
研究与开发
ci=
Σ
姨(xi-xj)2+ Σhi
(yi-yj)2
, i≠j
上式中,ci 是锚节点 i 的跳段距离,分子部分是锚节点
loranc开发于20世纪50年代工作在90110khz主要用于海上2004年在美国建立在西北欧等地使能在任何地点任何安装了相应设备的平台上使用功耗低体积小重量轻需要建立信号指纹数据库基于现有wlan基于wifi活动rfid标签最大可测距离大于50m世界上第一个fcc认证的基于uwb的活动rfid跟踪系统多普勒效应适用6颗1501000mnoaa卫星使用多径信号指纹定位在100m内效果较好radarmicrosoft公司基于rss的模式识别aeroscoutubisensepal650mssi公司sapphiredartuwbmssi公司pinpoint3didindoorgpstdoa和rssitdoa和aoatdoatdoatoaaoa343m5015mtdoa30cm3d可达1英尺好于30cm平均10cm有效距离超过200m13m1mm器件昂贵和80211存在干扰利用激光测距有效范围为2300m代价高71研究与开发ciijijij上式中ci是锚节点i的跳段距离分子部分是锚节点其他锚节点的跳数之和
0-无线传感器网络节点定位算法的研究综述

式 ( 3 ) 用线性方程组表示为: AX = b, 其中: (x 1 - x n ) ( y 1 - yn ) A = 2# ( x n- 1 - x n )
2 1 2 n 2 1
;X = ( y n- 1 - yn )
2 2 2
x ; y
x - x + y - y n + dn - d 1 b= x
[ 7] [ 8]
随着微机电系统 ( M EMS )、 无线通信和数字电子 技术的发展 , 无线传感器网络 ( W SN ) 在军事应用、 目 标追踪、 环境监测、 医疗保健、 空间探索等领域都得到 广泛的应用 。节点位置信息是无线传感器网络应 [ 3] 用的基础, 节点定位 技术在无线传感器网络中具有 重要的地位。 [ 4] GPS 是目前应用最广的定位服务, 但受到成本、 功耗、 扩展性等问题的限制 , 甚至在某些场合可能根本 无法实现。目前, 主要解决方法是利用少量已知节点, 通 过节点定位算法, 以获得节点的信息。因此, 要采用一定 的定位机制与算法来实现 W SN 的节点定位。从 1992年 [ 5 6] AT&T 实验室开发出室内定位系统 Activ e Badge 至今,
∃ 14∃
机
电
工
程
第 26 卷
射功率 , 在接收节点测量接收功率 , 计算传播损耗, 使 用理论或经验的信号传播模型将传播损耗转 化为距 离 , 该技术主要使用 RF 信号。该方法功耗低、 价廉。 但由于环境的影响, 其建模比较麻烦。通常有可能产 生 ! 50% 的测距误差。 TDOA( ti m e difference on arriv al)。在节点上安装 超声波收发器和 RF 收发器。测距时, 在发射端两种收 发器同时发射信号, 利用声波与电磁波在空气中传播速 度的差异 , 把时间转化为距离。该技术的测距精度比 RSSI高, 但也会受非视距 ( NLOS)问题对超声波信号的 传播影响。 AOA ( ang le of arriv al) 。以 两个或更多基 站发射 信号的到达角度来估计节点的位置。该测量技术将距 离的测量转化为角度的测量。 AOA 技 术也受外界环 境影响 , 而且需要额外硬件 , 可能无法满足传感器对硬 件尺寸和功耗的要求。 TOA( ti m e of arr iv al) 。通过测量信号传播时间来 测量距离, 需要节点间时间同步。因 W S N 节点的硬件 尺寸、 价格和功耗限制 , 其实际场合使用的较少。
基于无线传感器网络的定位技术研究综述
基于无线传感器网络的定位技术研究综述学生:沈静蕾学号:080304216导师:黄磊一、前言无线定位技术(UWB)的原理来源于无线电测距。
无线定位技术作为一种新型的短距离定位技术,具有适用范围广,实时性好,兼具通讯功能等优点。
在一些应用场合,例如森林火警、室内导航等具有很好的应用前景。
但是无线定位目前也存在着精度不高、容易受干扰等缺点。
在实际应用过程中,一般作为传统定位方式(如GPS定位)因条件限制无法使用时的替代技术。
近年来传感器网络的定位技术研究作为一种有效的解决方案被广泛的重视。
本课题针对目前国内外的研究现状,着重对无线传感器网络定位技术进行研究,力求在定位算法、软硬件设计等方面取得一定的研究成果。
二、主体无线传感器网络(WSN)定位技术具有重要的科研价值和广泛的应用前景,它的出现引起了全世界的广泛关注,它的研究历史并不长,但发展很快。
无线传感网络多年来经过不同领域研究人员的演绎,在军事领域、精细农业、安全监控、环保监测、建筑领域、医疗监护、工业监控、智能交通、物流管理、自由空间探索、智能家居等领域的应用得到了充分的肯定。
无线传感器节点定位过程中,当未知节点获得与邻近参考节点之间的距离或相对角度信息后,通常使用以下定位算法原理计算未知的位置。
1.三边测量法在无线传感器网络中,坐标系大多是二维空间,因此,只要知道一个未知节点到3个或3个以上锚节点的距离就可以确定该未知节点的坐标。
在基于测距的定位算法中,三边测量法是计算坐标的基本途径。
如图1所示。
已知A、B、C三个锚节点的坐标分别为(x a,y a)、(x b,y b)、(x c,y c),且它们到未知节点D 的距离分别为d a,d b,d c。
设未知节点D的坐标为(x,y),则可按如下公式(1)计算:abcddd===(1)化简得:12222222222222()2()2()2()a c a c a c a c a c b c b c a b a b a b x x y y x x y y d d x y x x y y x x y y d d -⎡⎤---+-+-⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥---+-+-⎢⎥⎣⎦⎣⎦⎣⎦(2) 公式(2)即为D 点坐标。
无线传感器网络的定位方法总结

无线传感器网络的定位方法总结无线传感器网络是一种由大量分散的传感器节点组成的网络系统,能够感知、收集和传输环境信息。
定位是无线传感器网络中非常重要的问题之一,它对于网络应用的实现和性能优化至关重要。
本文将对无线传感器网络的定位方法进行总结,并讨论各种方法的优缺点和适用场景。
传感器节点通常通过测量接收信号强度(Received Signal Strength,RSS)或时间到达差异(Time of Arrival,TOA)、到达时间差(Time Difference of Arrival,TDOA)等方式进行定位。
其中,RSS定位方法是一种简单且易于实施的方法,它利用节点之间的信号传输强度进行定位估计。
RSS定位方法在实际应用中具有较好的精度和鲁棒性,但受到信号衰减、多径效应和环境干扰等因素的影响,可能存在较大的定位误差。
TOA和TDOA定位方法利用传感器节点之间的信号传播时间差异进行定位估计。
TOA方法需要精确测量信号的到达时间,在实际情况下可能受到信号传播延迟和时钟齐步等问题的影响,导致定位误差。
TDOA方法通过测量不同节点之间的信号到达时间差异,可以减少对绝对时间的要求,提高定位的准确性。
但TDOA方法通常需要引入时间同步机制,并且对网络拓扑结构和节点位置的先验信息有一定要求。
除了传统的测量方法,基于信号强度指纹(Signal Strength Fingerprinting,SSF)的定位方法也得到了广泛应用。
SSF方法通过事先收集和建模节点位置与信号强度之间的关系,利用接收到的信号强度指纹进行定位估计。
SSF方法在实际应用中可以实现较高的定位精度,但需要事先收集大量样本数据,并且对节点数量和密度有一定要求。
另外,无线传感器网络还可以利用协作定位方法提高定位的精度和可靠性。
协作定位方法利用节点之间的合作和信息交互来提高定位的准确性。
常见的协作定位方法包括基于测距信息的多智能体定位方法和分布式定位方法。
无线传感器网络节点定位技术综述
无线传感器网络节点定位技术综述无线传感器网络(Wireless Sensor Network,WSN)是由大量分散在空间中的无线传感器节点组成的一种分布式网络。
无线传感器节点通常由能量受限的微控制器、无线通信模块、传感器、电池等组成。
由于传感器节点数量众多、分散,节点位置难以事先精确确定,因此,节点定位成为无线传感器网络中重要的问题之一。
节点的位置信息不仅与很多应用程序密切相关,如环境监测、军事领域、野生动物研究、安防监控等,而且也能为网络优化、拓扑控制、资源管理、数据挖掘等提供有利的支持。
无线传感器节点定位技术可以分为室内定位和室外定位。
在室内环境中,信号反射、折射等干扰都会对无线传感器节点的信号特征造成一定的影响,因此室内定位技术相对室外要难一些。
目前求解无线传感器节点位置的主要技术有距离测量、角度测量和基于测向的方法。
1、距离测量方法距离测量方法是最常用的定位方法之一,包括无线信号强度指示(Received Signal Strength Indicator,RSSI)、Time of Arrival(TOA)、Time Difference of Arrival (TDOA)和Angle of Arrival(AOA)等。
这些方法基本上都要采集节点之间的信号数据,通过处理数据得到节点间距离从而求出位置。
其中,最广泛应用的方法是RSSI。
RSSI是基于无线传感器节点接收信号强度对距离的反比关系进行定位的,它不需要额外传感器设备就能够实现节点定位。
但是,RSSI受到多种因素的干扰,如障碍物、温度等,会影响节点之间的信号强度传输,从而造成误差和不精确的定位结果。
2、基于角度测量的方法角度测量是指依据节点之间的方向角度信息来计算位置,包括Direction of Arrival (DOA)和Angle of Arrival(AOA)两种方法。
DOA方法是利用移动天线接受信号的角度差异实现节点定位,缺点是需要复杂的一组多通道接收器和天线阵列,成本较高且节点之间距离较远时精度不高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无线传感器网络相对定位算法综述苏进,李永战,冯贤文北京邮电大学自动化学院,北京 (100876)E-mail:sujin892@摘 要:相对定位算法无需事先布置信标节点的特点适用于对节点硬件成本和能耗,以及节 点分布等方面有限制的无线传感器网络。
综合分析了现有典型的相对定位算法, 通过对算法 在通信量、 定位覆盖率和定位精度三个方面进行综合分析比较, 说明了各算法的特点以及适 合的应用领域。
通过 NS-2 网络仿真工具对比了算法在不同节点网络拓扑结构下的性能指标, 并针对具体应用环境提出了算法的改进方案和未来发展方向。
关键词:无线传感器网络,相对定位算法,NS-2 中图分类号:TP3931. 引言定位技术是无线传感器网络中的支撑技术,缺少位置数据的信息往往是没有意义的[1]。
随着无线传感器网络向节点数量多, 铺设范围广, 基础设施简单和硬件成本低的方向发展[2], 如何在减少节点硬件组件, 算法实现简单的同时获得相对准确的定位信息已成为主要研究的 课题之一。
现有定位算法根据定位过程中是否需要使用已知位置的信标节点, 分为绝对定位 算法和相对定位算法[3]。
前者一般是在待测区域事先布置一定比例的锚节点,这些节点通过 GPS[4]或是其他方法已得知自身绝对坐标,其余的未知节点通过与这些信标节点通信获得自 身坐标。
相对定位算法则完全不需要事先布置信标节点,通过算法制定的方案,选取一定数 量的未知节点建立相对坐标, 其余的节点通过节点之间的协作关系和消息传输获取自身在相 对坐标系中的相对位置实现定位[5]。
相对定位算法无需信标节点和基础设施,硬件成本低, 并且不会受到复杂环境对远距离信号传输的影响, 适合于对节点硬件, 能耗以及环境适应性 有很高要求的无线传感器网络应用。
2. 定位算法分析在无线传感器网络中, 节点定位一般包括三个部分: 距离测定、 位置计算和定位过程[6]。
(1) 距离测定:就是获得两个节点之间距离的方法,可分为基于测距和无需测距。
基于 测距的算法(range-based)通过节点自身携带的测距功能直接测量两个节点之间的距离。
当前 比较重要的测距方法主要是到达时间(TOA)[7]、 到达时间差(TDOA)[8]和信号强度测距(RSSI)[9] 或者到达角度(AOA)[10]。
TOA(Time of Arrival):该技术通过测量信号传播时间来测量距离。
使用 TOA 技术最基 本的定位系统是 GPS, GPS 系统需要昂贵、 高性能的电子设备来精确同步卫星时钟。
因 WSN 节点硬件尺寸、价格和功耗限制,GPS 和其他 TOA 技术无法广泛应用于 WSN。
TDOA(Time Difference On Arrival):TDOA测距技术被广泛应用于WSN定位方案中。
通 过记录两种不同信号(常使用RF和超声波)到达时间差异,基于已知信号传播速度,直接把时 间转化为距离。
已有多种定位算法[11, 12, 13]使用TDOA实现测距。
但该技术受限于超声波传播 距离有限 ( 超声波信号通常传播距离仅为 20-30 英尺,因而网络需要密集部署 ) 和 NLOS (Non-Line-Of-Sight)问题对超声波信号的传播影响。
虽然已有发现并减轻NLOS影响的技术[14,15],但都需要大量计算和通信开销,不适用于低功耗的WSN应用中。
RSSI(Received Signal Strength Indicator):已知发射功率,在接收节点测量接收功率,计-1-算传播损耗,使用理论或是经验的信号传播模型将传播损耗转化为距离,该技术主要使用 RF 信号。
因传感器节点具有无线通信能力, 故是一种低功率、 廉价的测距方式, RADAR[16]、 SpotON[17]等许多项目中使用了该技术。
他的主要误差来源是环境影响所造成的信号传播模 型的建模复杂性;反射、多径传播、NLOS)、天线增益等问题都会对相同的距离产生显著不 同的传播损耗。
通常将其看为一种粗糙的测距技术,它可能产生 50%的测距误差[18]。
AOA(Angle of arrival):该技术是估算邻居节点发送信号方向,可通过天线阵列或多个 接收器来实现,除定位外,还能提供方向信息,如 MIT 的 The Cricket Compass 等项目[19]中 都使用 AOA 技术。
无需测距的算法(range-free)不需要节点自身的测距设备, 通过跳数或是其他信息[20]估计 自身到选定的信标节点的距离值, 由于是估计得到的数值, 相对于基于测距的算法获得的距 离值误差偏大。
(2) 位置计算: 在获取上述距离值之后, 节点需要通过位置计算的方法计算得到坐标值。
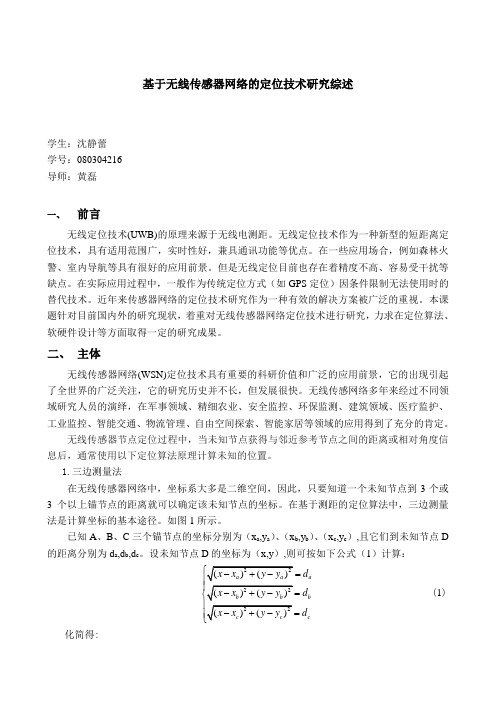
现有的算法一般采用三边测量法和三角测量法[21]计算坐标。
图 1 三边测量法示意图如图 1 所示, 在未知节点获得三个以上的信标节点距离值之后, 就可以通过式(1)、 式(2) 和式(3)计算自身坐标。
式中,(xa , ya)、(xb , yb)、(xc , yc)分别是三个信标节点的坐标,da、db、 dc 是未知节点到三个信标节点的距离。
⎧ ( x − x )2 + ( y − y )2 = d a a a ⎪ ⎪ 2 2 ⎨ ( x − xb ) + ( y − yb ) = db ⎪ ( x − xc ) 2 + ( y − yc ) 2 = d c ⎪ ⎩式(1)经过线性化,可得线性方程式(2):(1)AX + N = B2 2 2 ⎡ xa ⎤ − xc2 + ya − yc2 + d c2 − d a ⎡ 2( xa − xc ) 2( ya − yc ) ⎤ ⎡x ⎤ A=⎢ , X = B=⎢ 2 ⎥ ⎥ ⎢ y⎥ 2 2 2 2 2 ⎢ ⎣ ⎦ ⎣ 2( xb − xc ) 2( yb − yc ) ⎦ ⎣ xb − xc + yb − yc + d c − d b ⎥ ⎦(2)使用标准的最小均方差估计可得未知节点的坐标为:X = ( A × AT )−1 AT b(3)式(2)中的 N 是由于存在测距误差加入的参数,它是根据测距误差的分布形式存在的一 个随机误差向量。
如果未知节点测得的到信标节点的距离值大于三个,则可以加入(1)式中, 进行更精确的计算。
三角测量法与三边测量法类似,通过获取相对三个信标节点的角度值,计算得到图 1 中三个圆的半径,再经过三边测量法计算得到坐标。
三边测量法和三角测量法由于涉及大量的矩阵运算和最小二乘的运算,计算量较大,-2-针对这种情况,加州大学洛杉矶分校的 Andreas Savvides 等人提出的 n-hop multilateration primitive定位算法中提出的最大最小值法[22]通过简单的折线运算估计未知节点的位置, 如图 2所示。
图2 最大最小值法示意图图中A点和B点为信标节点,C点为未知节点。
在获得C点到A点和B点的折线距离a、b、 c之后,在三角形ACK中,利用斜边AC的长度a代替直角边AK的长度,从而K点移动到K/点, B点类似,从而有:⎧ xc = xa − a A点 ⇒ ⎨ ⎩ yc = ya − a, ⎧ ⎪ xc = xb + (b + c) B点 ⇒ ⎨ , ⎪ ⎩ yc = yb + (b + c), ,(4)以( xc − xc )和( yc − yc )为边长可得图2中实线画出的矩形区域,以矩形区域的质心C’作 为C点的估计位置,可得:, ⎧ xc + xc x + x + (b + c − a) x= = a b ⎪ ⎪ 2 2 ⎨ , ⎪ y = yc + yc = ya + yb + (b + c − a) ⎪ 2 2 ⎩(5)最大最小值法估计得到的坐标值由于是取矩形区域的质心代替实际位置,若测得的距 离值本身就存在较大的误差, 那么得出的结果没有三边定位精确, 在一些要求精度不是很严 格的情况或者是结果经过求精之后,可以满足需要。
(3) 定位过程: 不同算法根据上面两步获得的有限的距离值和部分节点的坐标, 计算其 余未知节点的机制。
由于各种算法采取的策略不同, 各种性能参数的区别主要由这一步决定。
在分析定位算法的时候,一般要针对具体情况综合考虑上述三个方面来考察算法性能。
3. 典型的相对定位算法3.1 SPA 算法瑞士洛桑联邦工业大学的Srdjan Capkun 等人最早针对没有基础设施的移动无线自组 网,提出SPA(self–positioning algorithm)算法[23]。
它以网络中节点密度最大的地方选取一个 参考点作为全局相对坐标系的原点, 其余每个节点分别通过测距功能测得邻居节点之间的距 离值,如图3所示,实线表示二者距离可测得,虚线表示二者不是邻居节点。
每个节点在邻 居节点中选取两个点A、B,选取原则是这两个点本身也是邻居节点,并且三个点不在同一 直线上。
以直线OA作为 x 轴,以B点在OA上的投影BxB为 y 轴正方向建立局部相对坐标系。
-3-所有的局部坐标系建立完成后, 相邻的坐标系通过坐标变换实现坐标统一, 最终所有节点都 变换形成以选取的参考点为原点的坐标系实现定位。
由于每个节点都要参与多次的坐标变 换, 计算量和通信开销都非常大。
此算法开始是针对无线自组网提出的, 不太考虑功耗问题, 但是用到无线传感器网络当中, 这种通信开销和节点数量呈指数比上升的算法需要根据实际 情况进行改进。
y By BOBxAx图3 SPA算法示意图3.2 聚类 SPA 算法美 国 仁 斯 利 尔 理 工 学 院 Rajagopal Iyengar 等 人 提 出 的 聚 类 SPA(clustering-based self–positioning algorithm)算法[24]是针对上述SPA算法通信量过大而提出的改进算法。
首先通 过运行随机的定时器选取网络中的主节点,主节点一跳范围内的其他节点成为它的从节点。
每个主节点使用SPA算法中相似的方法建立局部相对坐标系, 并计算得到其余从节点的局部 坐标。
完成第一步之后,相邻的局部坐标系依据ID号由大到小的原则进行坐标变换,最终以 ID号最小的主节点为原点建立相对坐标系, 从而实现定位。
由于算法以节点簇为单位进行坐 标变换,计算量和通信量相对SPA算法来说都得到大幅度减少,基本与节点个数呈线性比。
该算法由于簇之间变换要求拓扑结构比较规则,通信无障碍,所以在地形复杂,节点之间通 信容易产生冲突的环境下,定位效果不是很好,节点覆盖率比较低。
3.3 Map-growing 算法美国密苏里大学哥伦比亚分校的Xiaoli Li等人提出的 Map-growing 算法 [25] 同样基于测 距,其基本思想是通过递归算法,重复进行三边定位实现节点坐标获取。