利用Smart3D建模软件生成三维地形过程
如何在Blender中制作3D地形

如何在Blender中制作3D地形在Blender这款强大的三维建模软件中,我们可以通过一些简单的步骤来制作出逼真的3D地形。
本文将介绍一些关键的技巧,帮助您在Blender中创建出独特而精美的地形。
首先,打开Blender软件并选择一个适合的界面布局。
我们可以使用“Layout”选项,它提供了一个更加直观和易于使用的界面。
接下来,在3D视图中,我们需要创建一个平面,它将成为我们的地形的基础。
点击“Add”菜单,并选择“Mesh”下的“Plane”。
然后,将其缩放到所需的大小,这将决定地形的尺寸。
您可以使用缩放工具或者通过输入具体数值进行调整。
在创建好平面后,我们需要将其转换为一个可编辑的地形。
选择创建的平面,按下“Tab”键进入编辑模式。
然后,按下“A”键选择所有顶点,并按下“W”键打开特殊菜单,选择“Subdivide”选项。
这将在平面上创建出更多的顶点,细化地形的细节。
接下来,我们可以使用Blender的内置工具来操纵地形。
在编辑模式下,按下“Ctrl”+“Tab”键打开顶点选择模式。
然后,选择一些顶点,按下“G”键进行平移,或者按下“R”键进行旋转,以调整地形的形状。
您还可以使用“S”键进行缩放。
如果您想要更加自由地操纵地形,可以使用Blender的“Sculpt”功能。
通过在工具栏中选择“Sculpt”选项,您可以在地形上绘制或雕刻出特定的形状。
使用不同的笔刷和工具,您可以模拟出各种不同的地形元素,如山脉、河流和峡谷等。
为了使地形看起来更加真实,我们可以为其添加纹理。
在材质选项中,您可以选择不同的贴图,如岩石、草地或沙漠纹理。
为了添加纹理,首先在材质选项中创建一个新材质。
然后,选择纹理选项卡,并点击“New”按钮创建一个新纹理。
在纹理选项卡中,您可以加载自己的纹理图像或从库中选择预设的纹理。
一旦选择了纹理,您可以通过调整其缩放、旋转和偏移来适应地形。
您还可以使用节点编辑器来添加更多的纹理效果和调整。
Smart3D实景建模大师用户手册
当 Smart3D 实景建模大师引擎端 运行时软件不支持切换 Windows 用户,这将会引 起运行计算失败。因为硬件加速在当用户未连接时不可用。
关于非 ASCII 字符的路径
Smart3D 实景建模大师 目前版本还不支持非 ASCII 字符的路径。因此,所有指定
的输入与输出文件的路径必须使用 ASCII 字符(即暂不支持中文文件名和目录名)。
软件版本
Smart3D 实景建模大师具有几个独立的软件版本。
Smart3D 实景建模大师 Scanner 版本已经由 Expert 版本取代,Mapper 版本由 Ultimate 版本取代。 Smart3D 实景建模大师 Advanced Smart3D 实景建模大师 Advanced 可以从最高可达 100 亿像素的影像数据集中自动重建 独立物体,建筑,人工或自然地标。本版本最适用但不限于无人机监视系统,能生产高 精度的三维模型、数字地标模型(DSM)和真正射影像。 Smart3D 实景建模大师 Expert(前 Scanner) Smart3D 实景建模大师 Expert 在 Advanced 版本基础上将影像数据集大小增大到 300 亿 像素,并新增了通过任务序列分批处理的功能。Smart3D 实景建模大师 Expert 可为测 绘项目和精度要求高的三维扫描提供完美的解决方案。
模型修饰
在绝大多数情景下, 自动生成的三维模型可以直接使用。但是对于一些特定应用 ,用户 可能需要使用某些第三方软件对自动生成的三维模型的局部几何模型误差进行修饰,并 通过 Smart3D 实景建模大师主控台 将这些修饰后的三维模型重新导入,并提交新的 三维重建任务使修改后的模型重新通过自动纹理映射获得正确的贴图以完成三维模型 更新。
arcgis三维建模步骤
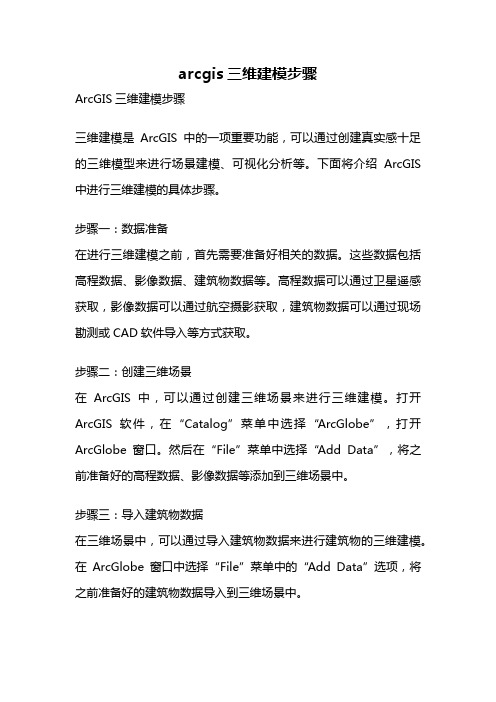
arcgis三维建模步骤ArcGIS三维建模步骤三维建模是ArcGIS中的一项重要功能,可以通过创建真实感十足的三维模型来进行场景建模、可视化分析等。
下面将介绍ArcGIS 中进行三维建模的具体步骤。
步骤一:数据准备在进行三维建模之前,首先需要准备好相关的数据。
这些数据包括高程数据、影像数据、建筑物数据等。
高程数据可以通过卫星遥感获取,影像数据可以通过航空摄影获取,建筑物数据可以通过现场勘测或CAD软件导入等方式获取。
步骤二:创建三维场景在ArcGIS中,可以通过创建三维场景来进行三维建模。
打开ArcGIS软件,在“Catalog”菜单中选择“ArcGlobe”,打开ArcGlobe窗口。
然后在“File”菜单中选择“Add Data”,将之前准备好的高程数据、影像数据等添加到三维场景中。
步骤三:导入建筑物数据在三维场景中,可以通过导入建筑物数据来进行建筑物的三维建模。
在ArcGlobe窗口中选择“File”菜单中的“Add Data”选项,将之前准备好的建筑物数据导入到三维场景中。
步骤四:贴图处理在三维建模中,贴图处理是一个重要的步骤。
通过选择合适的贴图材质,可以使建筑物的外观更加真实。
在ArcGlobe窗口中选择“Tools”菜单中的“Texture Mapping”选项,然后根据需要选择合适的贴图材质,并将其应用到建筑物上。
步骤五:调整建筑物形状在三维建模中,可以通过调整建筑物的形状来使其更加符合实际。
在ArcGlobe窗口中选择“Edit”菜单中的“Edit Vertices”选项,然后通过拖动顶点、边或面来调整建筑物的形状。
步骤六:添加细节在三维建模中,可以添加一些细节来增加建筑物的真实感。
例如,可以添加窗户、门、屋顶等细节元素。
在ArcGlobe窗口中选择“Edit”菜单中的“Edit Vertices”选项,然后通过在建筑物上绘制线段或面来添加细节元素。
步骤七:光照和阴影处理在三维建模中,光照和阴影处理可以使建筑物的外观更加逼真。
如何使用3DMax制作三维地图

如何使用3DMax制作三维地图3DMax作为常用的三维建模软件,受到了广大游戏、动漫和建模爱好者的追捧,但是大家可能没想到3DMax也可以用来进行三维地图的制作,那就给大家介绍一下3DMax的这种“非主流”用法。
工具/原料水经注万能地图下载器 Global Mapper 3DMax 2012方法/步骤1.首先我们需要高程数据和卫星影像数据,这些可以通过万能地图下载器进行获取,将万能地图下载器切换到谷歌地球之后,点击“下载”→“框选”,框选上需要下载的地方(图1)。
图12.双击后弹出的对话框中选择“高级模式”,勾选上“卫星地图”、“高程地图”、“标签(道路,地名信息)”,设置好任务的名称和勾选上下载的级别(图2)。
图23.下载完成后将高程和卫星影像都导出成tif格式,首先将高程数据加载到Global Mapper内(图3),点击菜单栏上的“工具”→“设置”,在弹出的“配置”对话框中点击“投影”,在“投影”一栏将坐标系选择为UTM(图4)。
备注:由于直接导出的坐标系是WGS84(地理坐标)无法在3DMax中形成三维模型,所以需要将地图转换一下坐标系,比如UTM(平面坐标),这样方便建模。
图3图44.点击“文件”→“输出”→“输出成海拔网格格式”(图5),在弹出的“选择输出格式”对话框中选择“DEM”,连续点击几个确定后将高程数据输出成.dem格式(图6)的文件备用。
图55.同样地,将影像加载到Global Mapper内并用第3步的方法将其坐标系转换成UTM(图7),转换成UTM坐标系后再点击“输出”→“输出光栅/图像格式”(图8)将影像输出成jpg格式备用。
图7图86.打开3Dmax,点击左上角的图标,再点击“导入”(图9),将之前的.dem格式的高程数据导入进来(图10、图11),导入后的效果如图12。
图9图10图11图127.点击左上角的图标,选择“导出”(图13),将其导出成.obj格式的数据(图14)。
Contextcapture(原smart3d)建模流程

Contextcapture建模流程初学篇1 新建工程新建工程,设置工程路径2 导入照片导入本机照片。
如需集群处理,则需要导入网络路径下的照片,详见 6.2工程设置:导入照片Set downsampling(设置采样率):该参数只会在空三的过程中对照片进行重采样空三,建模时仍旧使用原始分辨率影像。
Check image files...(检查航片完整性):建模失败的时候可以用此功能进行数据完整性检查。
Import positions...(导入POS):导入POS格式如下,a.如果有多个照片组(Photogroup)则必须保证每个照片组中的照片名称唯一,否则会导入失败;b.POS路径必须为英文;相机参数每个照片组(Photogroup)都会有一个相机参数,可以在右键菜单中导入或导出相机检校参数(特别对CC4.4以后版本有用)。
3 空中三角测量3.1常规空三流程空三参数设置,如第一次使用,则建议直接按照默认参数,只需“下一步”即可,如欲了解其中参数意义则进入如下内容:(1)设置名称,最好根据飞行架次或项目信息进行设置(2)参与空三的照片,默认使用全部照片。
(3)照片定位或地理参考设置(4)空三参数设置,通常默认参数即可a.对于地名拍摄照片,可能会修改“Keypoints density”、“Pair selection mode”、“Component construction mode”三个选项;b.对于航空拍摄照片,通常使用默认参数,如果多个架次且存在航高不一致的情况,则可能会修改“Pair selection mode”、“Component construction mode”两个选项;(实例:百里峡漂流两个架次航高不一致)(5)空三检查1首先保证General选项卡中显示Georeferencing情况的空三结果,才能进行建模操作。
2然后在特征点的三维视图中检查又没有明显的分层或交叉现象主要查看航片有没有交叉;特征点在道路或房屋区域有没有分层;检查像控点又没的平面和高层误差是否过大;检查航片位置检查像控点误差3.2空三刺点(在航片上刺地面像控点)导入像控点导入像控点之前需要先选择坐标系,此次坐标系更加像控点的坐标系进行选择,如果像控点使用的是地方坐标系,个人建议使用局部坐标系笛卡尔(cartesian)坐标系。
基于Smart3D的小物件三维建模技术及应用
基于Smart3D的小物件三维建模技术及应用钱磊;张文超【摘要】本文主要分析传统建模的弱势与不足,介绍了倾斜摄影技术的特点及基本原理、Smart3D软件进行小物件建模的详细流程以及后期模型的基本处理办法.通过对于小物件三维建模技术的研究,可以以很低的代价获取大量的模型用来构建数据库,从而取得经济效益.【期刊名称】《河南科技》【年(卷),期】2018(000)028【总页数】3页(P14-16)【关键词】倾斜摄影技术;Smart3D;实景三维建模【作者】钱磊;张文超【作者单位】安徽三联学院机械工程学院,安徽合肥 230601;安徽三联学院机械工程学院,安徽合肥 230601【正文语种】中文【中图分类】TV221.2目前,传统的大面积的三维城市建模的方法主要是测量建模的方法[1],采用外业人员手工拍照的方法,得到建筑物的结构和纹理,然后通过内业人员的处理,结合正射影像图、测区平面矢量图等数据,建立白模。
通过拍摄的纹理分析模型的细部结构,最后将拍摄的纹理处理后贴在白模上。
传统的建模方法虽然能够很好地控制模型精细度,但仍存在生产工艺复杂、生产成本高、工作强度大、模型生产效果不确定等问题,无法满足城市大范围快速建模的需要[2],而基于Smart3D的三维建模技术正是在倾斜摄影原理的基础上发展起来的。
1 倾斜摄影技术1.1 倾斜摄影技术概念倾斜摄影技术是国际测绘遥感领域近年来发展起来的一项高新技术,通过在同一飞行平台上搭载多台传感器,同时从垂直、倾斜等不同角度采集影像,获取地面物体更为完整准确的信息。
垂直地面角度拍摄获取的影像称为正片(1组影像),镜头朝向与地面成一定夹角拍摄获取的影像称为斜片(4组影像)。
1.2 倾斜摄影技术特点倾斜摄影技术具有以下特点:①反映地物周边真实情况;②实现单张影像量测;③可采集建筑物侧面纹理;④数据量小易于网络发布;⑤建模高效,成本较低。
2 试验材料及方法2.1 试验对象及器材新鲜纹理清晰的苹果、实验旋转圆台、摄影灯光器材、相机。
smart3D操作心得手写报告

smart3D操作心得手写报告关于影像1. 可以直接读取JEPG格式影像的焦距、像幅、传感器大小,并自动计算对应35mm焦距大小。
若有数据字段内容无法读取,需要人工对应手动输入。
sensor size 指的是传感器大小,mm单位,通常可以将像幅大小和像素大小相乘所得,若像片长宽不等,可使用长边的计算结果。
2. 可自动将不同镜头的像片分组。
3.影像路径和工程路径都需要英文环境,中文和符号会影响到空三无法开始执行。
关于空三设置空三运算过程需要开启Engine.按照严格的水平平面计算(类似严格水平核线)2. Automatic vertical 自动根据空三结果计算水平平面(类似非水平核线)3. Use Photo positioning data 使用影像所带的GPS信息关于成果生成成果生成的运算过程需要开启Engine。
Smart3D生成成果时,首先需要划分区块,生成的成果都是根据区块运算和存储的。
Smart3D生成成果过程非常耗时,需要消耗基本所有CPU和大量内存,请注意搭配合适的硬件配置。
1. 3D mesh三维场景:S3c、oSGB、Obj.S3c是Smart3D内部格式,实质上是一个分块模型的索引,可以将所有区块同时显示在一张图中;OSGB是国际通用三维场景格式,同样按照区块存储,但是没有索引,因此只能每次显示一块;OBJ是通用模型交换格式,若是需要使用第三方软件对生成的模型进行编辑,需要使用此格式交换。
2. 3D point cloud 三维点云:LAS3. orthophoto/DSM 真正射影像及相应DSM成果DOM成果必须依赖reference3D model,所有成果中,除第四项retouching外,其他所有结果均能产生reference3D model。
因此若欲生成DOM,必须先生成其它三种成果中任意一种,再生产DOM。
4. 3D mesh for retouching 三维场景重构:OBJ以上生成的3D mesh,若其中OBJ在第三方编辑完成,可通过retouching导回重建。
Smart3D系列教程3之《论照片三维重建中Smart3D几个工作模块地功能意义》

Smart3D系列教程3之《论照片三维重建中Smart3D几个工作模块的功能意义》【摘要】近年来,倾斜摄影测量技术是国际测绘遥感领域近年发展起来的一项高新技术,利用照片进行三维重建成为一项关键性的技术。
Smart3D软件,是照片三维重建主流软件之一,本文将就Smart3D建模软件,围绕它的几个模块功能:ContextCapture Master、ContextCapture Engine、ContextCapture SceneComposer、ContextCapture Settings、Acute3D Viewer,一一说明阐述各自的功能应用以及配合机制。
【关键词】Smart3D ContextCapture Master Engine SceneComposer Settings Viewer【正文】一、ContextCapture MasterContextCapture Master作为Smart3D建模软件的主控台,也是建模的主模块,也就是说整个流程都是在ContextCapture Master流水进行的,其他的模块辅助其重建运算。
下图是ContextCapture Master的图标和主界面:•工程一个工程管理着所有与它对应场景相关的处理数据。
工程项由区块列表和工程选项组成,分别通过两个选项卡管理:概述选项卡中显示项目当前状态的环境信息,项目信息面板并管理项目区块列表。
选项选项卡中包含了对集群网格化运算相关的选项。
在计算机集群环境时,工作队列中的目录必须使用网络路径,如下图,且要与Setting中的指定目录一致,才能使各个通过局域网连接的运算节点正确地获取原始影像、读取工程文件以及输出模型到制定的目录。
当工程文件路径、影像文件、作业队列目录、生产输出目录是非网络路径的话,在处理的时候会出现警告的提示语。
•区块工程包含一个或多个区块作为子项,一个区块管理着一系列用于一个或多个三维重建的输入图像与其属性信息,这些属性信息包括传感器尺寸、焦距、主点、透镜畸变以及位置与旋转等姿态信息:简言之,一组无损坏有精度的符合支持格式的且与其他影像有一定连续重叠度的照片就可以组成一个区块。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
利用Smart3D建模软件生成三维地形过程
本篇经验将和大家介绍以一组无人机倾斜摄影照片为原始数据,通过Smart3D 建模软件,重建生成三维地形的过程,希望对大家的工作和学习有所帮助!
•包括Smart3D建模软件
•一组垂直拍摄而且多角度、重叠度满足重建要求的航片
•航片对应的pos数据文件
关于通过无人机航拍的照片,照片进行三维重建生产模型,一些情况下照片中是自带有GPS数据信息的,而另一些情况则是会导出一组无定位信息的照片和对应的pos数据文本。
前者我们直接新建区块,把照片直接导入给软件跑出结果就ok了。
那么,这次我们主要来谈论研究第二种情况,即照片和pos分开的情况。
END
区别于第一种情况我们需要编辑下导入区块的表格,我们将照片的文件路径、参考坐标系、传感器的基本信息等信息嵌入到这个表格里,通过它来实现对照片和pos信息数据的导入。
后面的操作处理是跟直接导入照片的方法是没有差别的。
首先,我们看到原始数据的文件夹如下图所示,包括一组照片和相应的pos 文件,如下图所示:
1. 2
可以看到,这个pos数据是以文本文档的形式存在,如下图所示:
3
而在导入区块的过程当中,我们需要导入Excel表格,那么,这时需要运用一定的办公软件的技巧将其转换为Excel表格,这个表格需要包含如下图的4个工作表,如下图所示:
4
结果如下图所示:
5
Photogroups工作表中,名称列需要与照片工作表的PhotogroupName一致,如下图所示:
6
Photos工作表的编辑结果,如下图所示:
2.7
控制点工作表中,由于无人机航拍的区域不是很大,且对于建模成果的精度没有设定围,追求建成模型的速度,我们本次先不设控制点,很多朋友都是误把照片放到了这个工作表中,致使处理出现问题,需要注意一下。
编辑结果,如下图所示:
8
Options工作表中,是坐标系和照片路径的信息,设置如下,如下图所示:
3.9
到这一步为止,区块导入的表格就算编辑完毕了。
1.1打开Smart3D软件,输入工程名称和存储路径,这里注意不要勾选创建空区
块,因为我们需要直接导入表格来导入区块,示意图如下图所示:
2. 2
此时,导入上述的Excel表格,如下图所示:
3. 3
这里要提到前面的表格当中,各个工作表的英文名称务必要正确,这里我就是漏了一个字母,提示表格导入失败,如下图所示:
4. 4
返回修改,重新导入,结果如下图所示:
5. 5
可以看到,一个工作区块被顺利导入,接下来就可以开始处理工作了。
1. 1
区块导入之后,首先要对照片组做个检查,查看是否有丢失的情况,如下图所示:
2. 2
检查无误即可接着处理,否则返回照片组重新整理。
如下图可以看到,之前的区块导入的表格关于影像组的基本信息都体现出来了,如下图所示:
3. 3
照片组的每一影像都可以预览到其图像且可以打开其路径,空三还没开始前,每影像的姿态是未知的,如下图所示:
4. 4
3Dview中,每影像代表一个点,可以看到它们都是按照一定规则排列的,没有飘离出去的,若有,可以直接删除,如下图所示:
5. 5
一切检查工作正常,点击空三按钮,如下图所示:
6. 6
输入空三名称,如下图所示:
7.7 选择定位方式,如下图所示:
8.8 设置默认当前参数,如下图所示:
9.9 提交后,准备空三处理,如下图所示:
10.10
开启Engine,空三处理开始,如下图所示:
11.11
空三结束后查看精度报告,发现每照片都被识别处理,如下图所示:
12.12
影像组的照片全部被定位完毕,如下图所示:
13.13
3Dview中照片摄取围与区域模型之间的关系图,如下图所示:
END
1. 1
点击提交重建按钮,如下图所示:
2. 2
在Spatial framework中调整模型生成区域的大小,如下图所示:
3.3这里重点说明下模型分块生成的方法。
同样在Spatial framework中,默认
是不分块的(No tiling),如下图所示:
4. 4
上图第二个红框中的Expected maximum RAM usage per job代表每项处理任务的最大期望存值,这就要求处理该任务的计算机可用存必须保证大于这个存值,集群处理中,每台计算机的可用存必须有高于期望存的容量。
而当前的处理任务中,期望存值是14个G,对于处理它的只有4G装机存的计算器显然是不可行的,这时,我们需要作出分块处理,使得每块处理所需的存控制在计算器的可用存以下。
因此,我们将数据规则分块处理,将每块的边长分为200米,共23个区块,期望存降低为2.7G,如下图所示:
5. 5
分完块的数据,各瓦片可以在Reference 3D Model预览,如下图所示:
6. 6 一切准备就绪,如下图所示:
7.7 提交生成模型,如下图所示:
8.8 输入模型名称,如下图所示:
9.9 选择模型种类,如下图所示:
10.10 生成OSGB的三维模型,如下图所示:
11.11 选择全部的区块生成,如下图所示:
12.12 指定模型的保存路径,如下图所示:
13.13
到这里参数设置完毕,打开Engine,开始生成模型,如下图所示:
14.14
模型生成后可以看到各个瓦片的生成情况,如下图所示:
15.15
处理中的参数选择及坐标系,如下图所示:
END
1.对于由多个Tile组成的OSGB格式的Production数据,Acute3D viewer浏览
工具是无法直接同时加载浏览整体的三维模型的。
这里介绍一个简单直接的方法——通过Wish3D网络发布三维数据。
2.将成果文件夹中的data文件夹打包为ZIP压缩包,如下图所示:
3.在wish3d上传,如下图所示:
4.编辑完作品信息后,上传成功的模型效果,如下图所示:
5.上图可以看到,除了加载浏览模型以外,还可以对模型添加标注(文字、图片、
视频、全景),设置飞行路径,量测模型高度应用功能等,如下图所示:。