饿狼追兔建模
8277447_伊普雷涂鸦板

这期大家的绘画水平明显大有提高!萌总说了~~我们的绘画事业后继有人啦!鼓掌!撒花!
涂鸦板
广西 赵师程河北 贾康北京 张岩
陕西 王雄杰
广西 王家礼
河北 李迎军
对于当了裤子给坨坨买鸡腿的赵同学……嗯,我表示吃鸡腿很有压力,从今以后,为了减肥,只吃素食。
这个鸣人画得太热血了,而且螺旋丸不是搓出来的吗?
这幅画画得真心细致,不过人
物的比例(如手臂等部位)有所欠
缺,但是脸型是真心好看啊。
线条这么粗,你这不是涂鸦,
是剪纸吗?
悟空,你的尾巴肿么了?炸毛
拉?
“红果果”(赤裸裸)地造谣
啊,亲,红狼明显是倒在了坨坨狼
的脚下啊!
Copyright©博看网 . All Rights Reserved.
076。
饿狼追兔问题数学建模
饿狼追兔问题数学建模数学建模饿狼追兔问题摘要本文研究饿狼追兔问题,是在给定狼兔相对位置,以及兔子巢穴位置的情况下求解的,狼的速度是兔子速度两倍,在不考虑其他任何因素的情况下研究狼能否追上兔子的问题。
首先,我们对问题进行了适当的分析,然后根据已知条件建立了狼的运动轨迹微分模型。
其次,根据建好的模型,运用MATLAB编程,然后仿真画出了饿狼和野兔的运动轨迹图。
再次,用解析方法将建立的模型求解,并给出该问题的结论,准确的回答题目。
最后,用数值方法求解,将所求与前面所求进行对比,也给出结论,回答题目。
并将两种方法做相应比较。
结论:野兔可以安全回巢关键词:算法高阶常微分方程§1.1问题的提出在自然界中,各种生物都有它的生活规律,它们钩心斗角,各项神通,在饿狼追野兔的工程中,饿狼的速度是野兔的二倍,但是野兔有自己的洞穴,野兔在跑到自己洞穴之前被狼捉住,野兔就将会成为饿狼的囊中之物;如果野兔在饿狼捉住自己之前跑回到自己的洞穴,那么野兔就保住小命,得以生还。
图1-1-1为饿狼追野兔的两条曲线,其中绿线表示野兔,图中的箭头表示的是野兔的奔跑方向,野兔从远点开始沿y轴正方向运动,其洞穴在坐标为(0,60)的位置;红线为饿狼的运动轨迹,,图中的剪头表示饿狼追逐野兔的方向,饿狼从坐标为(100,0)的方向追逐野兔,饿狼的速度是野兔速度的二倍。
建立数学模型需研究一下几个问题:(1)设野兔的速度我v0,饿狼的速度为v1,野兔的奔跑方向是沿y轴正方向奔跑,而饿狼的方向是一直指向野兔的方向,即饿狼的运动的轨迹某一时候的切线指向同一时刻的野兔的位置。
建立饿狼追野兔的运动轨迹微分模型。
(2)根据建立的饿狼运动轨迹得微分模型,作出饿狼与野兔的运动轨迹图形。
(3)用解析方法求解,即根据第二步作出的饿狼渔业突地运动轨迹图形,分析兔子能否安全回到巢穴,即野兔的运动曲线与饿狼的运动曲线的交点是在点(0,60)-野兔巢穴的上面还是下面。
数学建模例题题
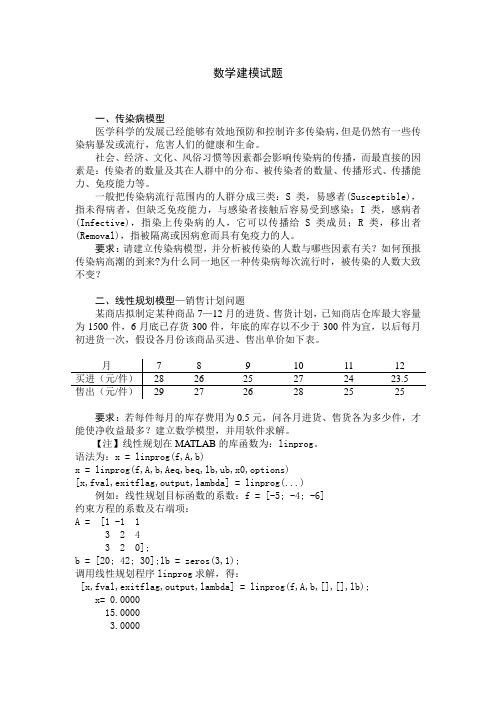
数学建模试题一、传染病模型医学科学的发展已经能够有效地预防和控制许多传染病,但是仍然有一些传染病暴发或流行,危害人们的健康和生命。
社会、经济、文化、风俗习惯等因素都会影响传染病的传播,而最直接的因素是:传染者的数量及其在人群中的分布、被传染者的数量、传播形式、传播能力、免疫能力等。
一般把传染病流行范围内的人群分成三类:S类,易感者(Susceptible),指未得病者,但缺乏免疫能力,与感染者接触后容易受到感染;I类,感病者(Infective),指染上传染病的人,它可以传播给S类成员;R类,移出者(Removal),指被隔离或因病愈而具有免疫力的人。
要求:请建立传染病模型,并分析被传染的人数与哪些因素有关?如何预报传染病高潮的到来?为什么同一地区一种传染病每次流行时,被传染的人数大致不变?二、线性规划模型—销售计划问题某商店拟制定某种商品7—12月的进货、售货计划,已知商店仓库最大容量为1500件,6月底已存货300件,年底的库存以不少于300件为宜,以后每月初进货一次,假设各月份该商品买进、售出单价如下表。
要求:若每件每月的库存费用为0.5元,问各月进货、售货各为多少件,才能使净收益最多?建立数学模型,并用软件求解。
【注】线性规划在MATLAB的库函数为:linprog。
语法为:x = linprog(f,A,b)x = linprog(f,A,b,Aeq,beq,lb,ub,x0,options)[x,fval,exitflag,output,lambda] = linprog(...)例如:线性规划目标函数的系数:f = [-5; -4; -6]约束方程的系数及右端项:A = [1 -1 13 2 43 2 0];b = [20; 42; 30];lb = zeros(3,1);调用线性规划程序linprog求解,得:[x,fval,exitflag,output,lambda] = linprog(f,A,b,[],[],lb);x= 0.000015.00003.0000三、一阶常微分方程模型—人口模型与预测 下表列出了中国1982-1998年的人口统计数据,取1982年为起始年(0=t ),1016540=N 万人,200000=m N 万人。
第3章 微分方程模型
第三章 微分方程建模在许多实际问题的研究中,要直接导出变量之间的函数关系较为困难,但要导出包含未知函数的导数或微分的关系式却较为容易,此时即可用建立微分方程模型的方法来研究实际问题。
例如,根据自由落体运动的重力加速度g 为常数及初始条件即可得出自由落体运动的公式、根据单摆的受力分析及牛顿第二定理即可得到单摆运动满足的方程等等就是典型的实例。
本章除了介绍一些来自经典力学的物理及一些几何方面的微分方程问题以外,也介绍了一些稍有不同的微分方程应用题。
这些模型研究的主要是来自于非物理领域的实际问题,对这些问题,我们将分析其特征,根据具体情况进行类比,提出假设条件并建立微分方程模型加以研究。
提出的假设条件不同,将会导出不同的微分方程。
最后还要将求解的结果与实际现象进行对比,如果差异较大还应反复修改假设建立新的模型。
因此,在这类模型中,微分方程被当成了研究问题的工具。
事实上,在连续变量问题的研究中,微分方程或微分方程组还是十分常用的数学工具之一。
§3.1 几个简单实例例3.1 (理想单摆运动的周期)本例的目的是建立理想单摆运动满足的微分方程,由该微分方程即可得出理想单摆运动的周期公式。
(图3-1)从图3-1中不难看出,小球所受的合力为 sin mg ,根据牛顿第二定律可得:θθsin mg ml -= 从而得出两阶微分方程:sin 0(0)0,(0)g l θθθθθ⎧+=⎪⎨⎪==⎩ (3.1) 这就是理想单摆运动满足的微分方程。
(3.1)是一个两阶非线性常微分方程,不容易求解。
根据微积分知识,当θ很小时,有sin θ≈θ,此时,为简单起见,我们可考察(3.1)的近似线性方程:⎪⎩⎪⎨⎧===+∙∙∙0)0(,0)0(0ϑϑϑϑϑl g (3.2)(3.2)的特征方程为02=+lg λ 对应的特征根为i lg =λ,(其中i 为虚单位),故(3.2)中的微分方程的通解为: t c t c t ωωϑcos sin )(21+=,其中lg =ω 代入初始条件,即可求得满足初始条件的微分方程问题(3.2)的解θ(t )= θ0cos ωt注意到当4T t =时,θ(t ) = 0,即可得出 24πω==T l g t 故有 l g T π2=这就是中学物理中理想单摆运动周期的近似公式。
vensim_使用手册
6.1 Vensim 规则......................................................................................................................25 6.2 兔子繁殖模型..................................................................................................................25
该使用手册是以 Vensim 5.4a PLE 版本为基础,结合教学和科研实践整理而 成的。本手册可以帮助初学者快速掌握 Vensim 的使用,在复旦大学管理学院本 科教学多次试用,收到了很好的效果。本手册可以配合《系统动力学》课程的教 学和实验、为教学服务,也可以供科研工作者参考。虽然手册中的各个步骤都上 机做了验证,但仍然会存在错误和不足,希望广大使用者批评指正。同时也欢迎 大家就 Vensim DSS 的相关内容一起学习和讨论。
第 3 章 应用举例 .......................................................................................................13
3.1 用 Vensim 建模步骤..........................................................................13 3.2 劳动力库存问题建模实例..............................................................................................13
PowerSHAPE基础教程
用户坐标系 .................................................................................................................................................................... 33 方框范例 .................................................................................................................................................................... 33 提示:- ................................................................................................................................................................ 39 模具零件用户坐标系对齐定位................................................................................................................................. 41 用户坐标系工具栏 .................................................................................................................................................... 43
RegCM 3.1 说明书 (中文版 )

Nellie Elguindi, Xunqiang Bi, Filippo Giorgi, Bad rinath Nagarajan, Jeremy Pal, Fa bien Solmon, Sara Rauscher, and Ashraf Zakey
Trieste, 意大利 2007 年 7 月
2 模式描述......................................................................................................................................................................9 2.1 动力学...................................................................................................................................................................9 2.2 物理过程............................................................................................................................................................11 2.2.1 辐射方案...................................................................................................................................................11 2.2.2 陆面模型..................................................................................................................................................11 2.2.3 行星边界层方案...................................................................................................................................11 2.2.4 对流降雨方案.......................................................................................................................................12 2.2.5 大尺度降雨方案..................................................................................................................................14 2.2.6 海洋通量参数.......................................................................................................................................15 2.2.7 压力梯度方案.......................................................................................................................................15 2.2.8 湖泊模型..................................................................................................................................................1.5 2.2.9 气溶胶和尘埃模型(化学模型)..............................................................................................16
ETABS用户指南

用户指南
详图 ........................................................................................................................... 2-6 工具 ........................................................................................................................... 2-6 选项 ........................................................................................................................... 2-6 帮助 ........................................................................................................................... 2-7
ETABS® v18
集成化的建筑结构设计软件
用户指南
Computers and Structures, Inc. Berkeley, California, USA
北京筑信达工程咨询有限公司
北京市石景山区古盛路泰然大厦 408 100043
Version 2019 2019-06
版权
计算机程序 ETABS®及全部相关文档都是受专利法和版权法保护的产品。全球范围
第四章 开始一个模型 ............................................................................................................4-1 目的 ........................................................................................................................... 4-1 创建基本轴网系统 ................................................................................................... 4-1 轴网尺寸(平面)——定义一个轴网系统 ............................................................. 4-3 层尺寸——定义层数据 ........................................................................................... 4-4
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
fun1(a,b,d,theta,T); %函数的调用
B. fun1.m 文件 %基于 ode45 函数进行过修改 %用于饿狼追兔子的数学模型 %SC in 26-Jun-2015 function fun1(a,b,d,theta,T) %输入 a b d theta 便可分析出饿狼是否可以追上兔子; [t,y]=ode45(@fun2,[0,T],[0 0],[], a,b,d,theta); x=[d+a*t*cos(theta),a*t*sin(theta)]; n=length(t); j=n;
模型建立:
设狼发现兔子时狼的位置位于坐标原点,此时兔子位于 x 轴正向 dkm 处, 设其速度为 akm/h,方向与 x 轴正向的夹角为 ,其到巢穴的距离为 lkm,而狼的速度 设为 bkm/h。在追兔子的过程中假设狼始终对准兔子奔跑。
(x(t ), y(t )) 设 t 时刻狼的位置为 ,那么
2 2
b at y (t ) 1 d x(t ) b d x(t ) 1 at y (t )
2
........................................................(8)
2
........................................................(9)
则认为饿狼可以追上兔子,即兔子不能安全到达巢穴。
问题求解:
在此问题中设 x 轴正向为向正西方向的,y 轴正向为向正北方向的。则有
d 0.1 ,T 0.06 / a ,b 2a, = ; 2
则(3) (4)具体为
dx dt dy dt b dy 1 dx b dx 1 dy
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
从图中,我们可以看出当兔子到达巢穴时,恶狼并未追上兔子,所以兔子 可以安全到达巢穴。
附件: matlab 程序
A. Wolf_figure.m 文件 %调用函数对狼追兔子的动态过程进行绘图显示 %参数一;可以自己调节其他的参数 clear;close; d=0.1; theta=pi/2; %兔子奔跑方向与 x 轴正方向的夹角 a=30; b=2*a; %b=3*a; T=0.06/a; %兔子的速度是 30km/h %狼的速度,设置为兔子的两倍 %狼的速度设置为兔子的 3 倍 %兔子奔跑到巢穴所需要的时间
结合(1)(2)得到下面的微分方程
dx dt dy dt
b dy 1 dx b dx 1 dy
2 2
b at sin y (t ) 1 d at cos x(t ) b d at cos x(t ) 1 at sin y (t )
for i=1:n if i>40 pause; 先画出 40 个点再用 end %此行是为了用键盘控制打击的过程,
...键盘控制,更直观。
plot(x(i,1),x(i,2),'b^',y(i,1),y(i,2),'r.');
axis([0 max(x(:,1))*1.1 0 1.1*max(x(:,2))]);hold on; m(i)=getframe; if y(i,1)>=x(i,1), j=i; break; %捕获每一次画出的一个点的图像
end end hold off; movie(m); hold on; plot(y(j,1),y(j,2),'k*','markersize',20); legend('兔子','狼',2); if j<n, sprintf('兔子追上狼的时间是 %d',t(j)) hold on; plot(y(j,1),y(j,2),'rh','markersize',20); hold off; title(['狼将在第',num2str(t(j)),'小时追上兔子']); else title(['狼在',num2str(T),'小时内不能追上兔子']); end %演示获得的图像
求解此微分方程,得出 x(l/a)发现 x(l/a)<100,所以饿狼在兔子到达巢 穴之前没有追上兔子。除此之外,我们也可以利用 matlab 编程求解(8) (9).
这里我们选定 a=30km/h,用 matlab 画出饿狼追兔的一个演示图:
饿狼追兔图 0.06 0.05 0.04 0.03 0.02 0.01 0 兔子 饿狼 兔子已经到达巢穴
at l.........................................................................(6) 即t l T ................................................................(7) a
恶狼追兔问题建模
问题重述: 设有一只兔子和一只狼,兔子位于狼的正西 100m 处。假设兔子与狼同 时发现对方,并开始了一场追逐。兔子往正北 60m 处的巢穴跑,而狼则在其后 追赶。假设兔子和狼均以最大速度匀速奔跑且狼的速度是兔子速度的两倍。问兔 子能否安全回到巢穴。
解:
显然此问题为微分方程中导弹问题的变形,下面建立一般意义上的模型, 然后再进行求解。
C.fun2.m 文件 function dy=fun2(t,y,a,b,d,theta) %给出常微分方程的表达式 dydx=(a*t*sin(theta)-y(2)+1e-8)/... (abs(d+a*t*cos(theta)-y(1))+1e-8); dy(1)=b/(1+dydx^2)^0.5; dy(2)=b/(1+dydx^(-2))^0.5; dy=dy(:);
2
.................................(3)
2
.................................(4)
初始条件 x(0) 0, y(0) 0 .对于给定的 a, b, d , , l ,进行计算。若 x(t ) 满足
x(t ) d at cos ........................................................(5)
dx dy ( )2 ( )2 b.....................................................(1) dt dt
还可以知道 t 时刻兔子的位置为 (d at cos , at sin ) ,由于时刻对准目标, 则
狼的方向为:
dy at s i n y t( ) ................................................(2) dx d at cos x(t )