集成触发器控制的三相整流电路闭环系统设计
双闭环三相异步电机调压调速系统实验报告

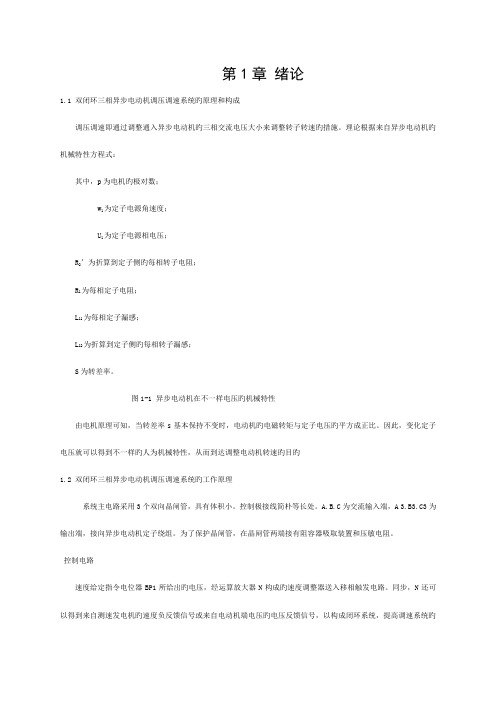
“运动控制系统”专题实验r2 r2+Rs1 r2+Rs2 r2+Rs3sm sm1 sm2 s Tem图6-1整个调速系统采用了速度,电流两个反馈控制环。
这里的速度环作用基本上与直流调速系统相同而电流环的作用则有所不同。
在稳定运行情况下,电流环对电网振动仍有较大的抗扰作用,但在起动过程中电流环仅起限制最大电流的作用,不会出现最佳起动的恒流特性,也不可能是恒转矩起动。
异步电机调压调速系统结构简单,采用双闭环系统时静差率较小,且比较容易实现正,反转,反接和能耗制动。
但在恒转矩负载下不能长时间低速运行,因低速运行时转差功率全部消耗在转子电阻中,使转子过热。
2.双闭环异步电机调压调速系统的机械特性。
转子变电阻时的机械特性:3.三相异步电机的调速方法三种类型:转差功率消耗型:调压、变电阻等调速方式,转速越低,转差功率消耗越大。
转差功率馈送型:控制绕线转子异步电机的转子电压,利用转差功率可实现调节转速的目的。
如串级调速。
转差功率不变型:转差功率很小,而且不随转速变换,如改变磁极对数调速,变频调速。
1)定子调压调速当负载转矩一定时,随着电机定子电压的降低,主磁通减少,转子感应电势减少,转(2)空载电压为200V时n/(r/min) 1281 1223 1184 1107 1045I G/A 0.10 0.11 0.12 0.13 0.13U G/V 182 179 176 166 157 M/(N·m) 0.2265 0.2458 0.2636 0.2814 0.28312.闭环系统静特性n/(r/min) 1420 1415 1418 1415 1416 1412I G/A 0.11 0.14 0.16 0.19 0.21 0.26U G/V 203 200 201 200 200 199 M/(N·m) 0.2394 0.2795 0.3080 0.3777 0.3496 0.4482 静特性曲线:与开环机械特性比较,闭环静特性比开环机械特性硬得多,且随着电压降低,开环特性越来越软。
JK03-F 型三相晶闸管移相触发控制器 说明书

JK03-F型三相晶闸管移相触发控制器使用说明书一. 产品简介:JK03-F型三相晶闸管控制触发器是我公司最新推出的新型多功能晶闸管触发控制器。
该控制器主要由电源、调节器、移相控制、脉冲形成、闭环PI调节器、脉冲放大及脉冲变压器输出单元等组成。
可构成具有恒压或恒流输出功能的三相调压系统,该产品通用性强,工作可靠,脉冲对称度高,抗干扰性强,接线简单,使用方便。
二. 产品用途:适用于各种晶闸管直流稳压电源及交流相控调压器的控制单元,广泛应用于电加热炉,电镀电解电源,充电电源,双反星形整流电源,水处理设备,硅碳棒生产,电焊机调压等场合。
三. 产品特点z通用性强,可用于三相全控桥,半控桥,双反星形晶闸管整流电路,三相晶闸管反并联交流调压电路(半控或全控),可接各类三角形接法或星形接法的阻性、容性、感性负载。
z移相触发,标准模拟信号接口,方便与控制仪表的连接,控制信号可以是0-10V电压信号,也可以是4-20mA标准电流信号,既可手动调节,又能自动控制。
z有同步和相序自适应电路,免去传统可控硅电路认定同步和相序的麻烦,使用与调试极其方便。
同步信号输入电压是380V,无需外接电源。
z触发功率大,可触发4000A单只可控硅,可触发平板型、螺栓型、集成型可控硅模块。
z功能强大,具有恒流或恒压选择功能,软启动选择功能,避免了启动瞬间大电流对可控硅及负载的冲击。
通过选择此项功能可实现简单电机软启动,启动时间0-10秒。
反馈信号可直接输入,内部带有隔离措施,具有缺相保护功能,禁止输出功能。
z工作可靠,适用性强,有非常好的抗干扰能力,采用进口绝缘漆喷洒表面,防潮、防湿、防尘、耐腐蚀。
四. 技术参数:z工作条件:环境温度:-25—60º相对湿度:≤85%电源:三相380V AC±10% 50Hz外型尺寸:215*173mm 安装尺寸:205*163mm 重量:600gz电压反馈:AC 380V或DC 500V (DC 12V低压时)电流反馈:75 mV分流器,霍尔电流传感器或100 mA的电流互感器z触发输出:六路脉冲列触发,脉冲变压器输出;触发电流峰值≥600mA 触发电压峰值≥6V触发脉冲移相范围:0--170º—————————————————————————————————广州佳凯电子有限公司 地址:广州市寺右新马路83号美景大厦302TEL:020-******** 87371077 FAX:020-********HTTP:// E-mail:jiakaico@五.接线端子说明:z1、2脚:控制器输出15VDC(80mA)的电源,为外接各类传感器提供一个工作电源,3脚和4脚为传感器输入端;其中:1脚为正15V电源,2脚为负15V电源,3脚为霍尔传感器输入端,4脚为霍尔传感器接地。
双闭环三相异步电动机调压调速的系统设计与仿真课程设计模板
第1章绪论1.1 双闭环三相异步电动机调压调速系统旳原理和构成调压调速即通过调整通入异步电动机旳三相交流电压大小来调整转子转速旳措施。
理论根据来自异步电动机旳机械特性方程式:其中,p为电机旳极对数;w1为定子电源角速度;U1为定子电源相电压;R2’为折算到定子侧旳每相转子电阻;R1为每相定子电阻;L11为每相定子漏感;L12为折算到定子侧旳每相转子漏感;S为转差率。
图1-1 异步电动机在不一样电压旳机械特性由电机原理可知,当转差率s基本保持不变时,电动机旳电磁转矩与定子电压旳平方成正比。
因此,变化定子电压就可以得到不一样旳人为机械特性,从而到达调整电动机转速旳目旳1.2 双闭环三相异步电动机调压调速系统旳工作原理系统主电路采用3个双向晶闸管,具有体积小。
控制极接线简朴等长处。
A.B.C为交流输入端,A 3.B3.C3为输出端,接向异步电动机定子绕组。
为了保护晶闸管,在晶闸管两端接有阻容器吸取装置和压敏电阻。
控制电路速度给定指令电位器BP1所给出旳电压,经运算放大器N构成旳速度调整器送入移相触发电路。
同步,N还可以得到来自测速发电机旳速度负反馈信号或来自电动机端电压旳电压反馈信号,以构成闭环系统,提高调速系统旳性能。
移相触发电路双向晶闸管有4种触发方式。
本系统采用负脉冲触发,即不管电源电压在正半周期还是负半周期,触发电路都输出负得触发脉冲。
负脉冲触发所需要旳门极电压和电流较小,故轻易保证足够大旳触发功率,且触发电路简朴。
TS是同步变压器,为保证触发电路在电源正负半波时都能可靠触发,又有足够旳移相范围,TS采用DY11型接法。
移相触发电路采用锯齿波同步方式,可产生双脉冲并有强触发脉冲电源(+40V)经X31送到脉冲变压器旳一次侧第2章双闭环三相异步电动机调压调速系统旳设计方案2.1 主电路设计调压电路变化加在定子上旳电压是通过交流调压器实现旳。
目前广泛采用旳交流调压器由晶闸管等器件构成。
它是将三个双向晶闸管分别接到三相交流电源与三相定子绕组之间通过调整晶闸管导通角旳大小来调整加到定子绕组两端旳端电压。
双闭环直流调速系统的设计与仿真毕业设计论文
本科毕业设计(论文)题目:双闭环直流调速系统的设计与仿真研究Graduation Design (Thesis)Design and Simulation of Double Loop DC Motor Control SystemByWu JieSupervised byAssociate Prof. Zhang zhenyanDepartment of Automation EngineeringNanjing Institute of TechnologyMay, 2014摘要为了提高运动控制系统在实际工程中的应用效率,本文介绍了直流调速系统的工程设计方法[1],利用 MATLAB软件,对直流调速系统进行数学建模和系统仿真的研究。
所给出的仿真方法,可以灵活地调节系统的参数,从而获得理想的设计结果,并对设计出的系统进行分析。
建立调节器工程设计方法所遵循的原则是:1)概念清楚、易懂。
2)计算公式简明、好记。
3)不仅给出参数计算公式,而且指明参数调节方向。
4)能考虑饱和非线性控制的情况,同时给出简单的计算公式。
5)适合于各种可以简化成典型系统的反馈控制系统[2]。
由于这个课题相对简单,我在里面加入了相关性的内容以丰富本课题的广度和深度。
在本设计中,我加入了三种简单的单闭环直流调速系统,并且通过对它们进行仿真分析,比较找出了它们的不足之处,从而更明显地体现了双闭环直流调速系统的优越性。
并且通过对两种典型的双闭环直流调速系统进行仿真分析,从而更好地理解和运用双闭环直流调速系统[3]。
关键词:直流电动机;双闭环调速;MATLAB;仿真;直流调速系统;直流脉宽调制;工程设计方法ABSTRACTIn order to raise application efficiency of the motion control system in actual project ,this article discussed the engineering design methods of the speed-governing system of DC motor. The mathematical modeling and system simulation of direct current governor system are researched by means of MATLAB platform . The simulation method can adjust the system controller parameters flexibly, so as to achieve the ideal design results, and the design of the system are analyzed.A controller design method is the principles of:(1)The concept of clear, easy to understand.(2)Simple formula, easy to remember.(3)Not only gives the parameter calculation formula, and indicates the parameter adjustment direction.(4)Can consider the saturation nonlinear control, and gives a simple formula.(5)Suitable for all kinds of feedback control systems can be simplified into a typical system.Because this subject is relatively simple, I joined the correlation content inside to enrich the breadth and depth of the subject. In this design, I added three simple single loop DC speed regulation system, and then analyze them, compared to find their deficiencies, and thus more clearly showed the superiority of double closed loop DC speed regulating system. And through the simulation analysis of two kinds of typical double loop DC speed control system, so as to better understand and use the double loop DC speed control system.Keywords: DC motor, double closed loop,MATLAB,Simulation,V-M,PWM-M,The engineering design method目录摘要 (I)ABSTRACT (II)第一章绪论 (1)1.1 课题研究背景 (1)1.2 直流调速系统国内外研究现状 (1)1.3 研究双闭环直流调速系统的意义 (2)1.4 论文的主要研究内容 (2)第二章仿真软件以及相关硬件简介 (3)2.1 MATLAB/Simulink仿真平台 (3)2.2 仿真的数值算法 (3)2.3 工程设计法 (4)2.4 直流电动机 (4)第三章简单闭环调速系统的设计与仿真 (5)3.1 单闭环有静差转速负反馈调速系统的设计与仿真 (5)3.2 单闭环无静差转速负反馈调速系统的设计与仿真 (11)3.3 带电流截止负反馈的转速反馈系统的设计与仿真 (13)3.4 简单闭环调速系统的优缺点比较 (15)第四章转速、电流双闭环直流调速系统的设计与仿真 (17)4.1 转速、电流双闭环调速系统的设计与仿真 (17)4.2 V-M直流调速系统的设计与仿真 (19)4.3 PWM-M直流调速系统的设计与仿真 (26)第五章总结与展望 (34)致谢 (35)参考文献 (36)第一章绪论1.1 课题研究背景在现代化的工业生产过程中,许多生产机械要求在一定的范围内进行速度的平滑调节,并且要求有良好的稳态、动态性能[4]。
三相全控晶闸管整流器数字触发系统设计
三相全控晶闸管整流器数字触发系统设计摘要三相全控桥式整流电路在生产生活中应用十分广泛,在本文中重点介绍了该电路的相关理论,同时采用单片机实现对电路触发器的控制。
首先,先用检测电路找到自然换向点。
其次,通过检测电路找到自然换向点后,发出的信号通知单片机开始运行既定的程序,按照一定的触发规律触发整流电路的晶闸管以控制触发电路运行。
最后,通过STC12C5A60S2单片机内置的A/D转换器及其程序对触发角进行调控。
最终结果表明通过单片机进行控制的触发方式具有高效、快捷、灵活等诸多特性,为三相全控桥式整流电路的应用提供了一种合适的方法。
关键词:晶闸管,三相全控桥式整流,自然换向点Design of Digital trigger system for three-phase fully controlledThyristor RectifierAbstractThree-phase fully controlled bridge rectifier circuit is widely used in industrial field. [1] on the basis of studying the theory of fully controlled rectifier circuit, 51 single chip microcomputer is used to control the rectifier circuit. First of all, the detection circuit is used to find the natural directional point. Secondly, after the natural reversal point is found by the detection circuit, the signal notifies the single chip microcomputer to start running the established program, and triggers the thyristor of the rectifier circuit according to a certain trigger law to control the operation of the trigger circuit. Finally, the trigger angle is controlled by the A / D converter and its program built in STC12C5A60S2 single chip microcomputer. The final results show that the trigger method has a series of characteristics, such as fast, convenient, intuitive, flexible and so on, which provides another simple choice and method for power electronics teaching and experiment.Key Words: thyristor , Three-phase fully controlled bridge rectifier, Natural commutation point第一章 绪论1.1 研究背景及其意义 在过去几十年里,电子设备的演化快速发展,促成了电能的进化和进步。
三相桥式全控整流电路触发电路的设计

三相桥式全控整流电路触发电路的设计
电路图的选择
晶闸管具有硅整流器件的特性,能在高电压、大电流条件下工作,且其工作过程可以控制、被广泛应用于可控整流、交流调压、无触点电子开关、逆变及变频等电子电路中。
晶闸管具有下面的特性:
1)当晶闸管承受反向电压时,无论门极是否有触发电流,晶闸管都不会导通。
2)晶闸管承受正向阳极电压时,仅在门极承受正向电压的情况下晶闸管才导通。
3)晶闸管在导通情况下,只要有一定的正向阳极电压,不论门极电压如何变化,晶闸管都保持导通,即晶闸管导通后,门极失去作用。
4)晶闸管在导通情况下,当主回路电压(或电流)减小到接近于零时,晶闸管关断。
图5 双脉冲触发电路。
异步电动机采用调压调速时

异步电动机采用调压调速时,由于同步转速不变和机械特性较硬,因此对普通异步电动机来说其调速范围很有限,无实用价值,而对力矩电动机或绕线式异步电动机在转子中串入适当的电阻后是机械特性变软后,其调速范围有所扩大,但在负载或电网电压波动情况下,其转速波动严重,为此长采用双闭环调速系统。
双闭环三相异步电动机调压调速系统的主电路由三相晶闸管交流调压器及三相绕线式异步电动机组成。
控制部分由“电流调节器”,“速度变换”,“触发电路”,“正桥功放”等组成。
其系统原理框图如图所示。
整个调速系统采用了速度,电流两个反馈控制环。
这里的速度环作用基本上与直流调速系统想同,而电流环的作用则有所不同。
在稳定运行的情况下,电流环对电网扰动仍有较大的抗绕作用,但在启动过程中电流环仅起限制最大电流的作用,不会出现最佳启动的恒流特性,也不可能是恒转矩启动。
异步电动机调压调速系统结构简单,采用双闭环系统时静差率较小,且比较容易实现正,反转和能耗制动。
但在恒转矩负载下不能长时间低速运行,因为低速运行时转差率功率Ps=SPm全部消耗在转子电阻中,会使转子过热。
222222交流调速调压系统的电气原理图如图所示。
交流调压调速系统的仿真模型如图所示。
下面介绍各部分的建模与参数设置过程。
1.系统的建模和模型参数设置(1)主电路的建模和参数设置由图可见,主电路由三相对称交流电压源,晶闸管三相交流调压器,交流异步电动机,电动机信号分配器等部分组成。
此处着重讨论晶闸管三相交流调压器,交流异步电动机,电动机测试信号分配器的建模和参数设置问题。
@1晶闸管三相交流调压器的建模和参数设置。
晶闸管三相交流调压器通常是采用三对反并联的晶闸管元件组成,单个晶闸管采用“相位控制”方式,利用电网自然换流。
图()所示为晶闸管三相交流调压器的仿真模型及模块符号。
图()所示为三相交流调压器中的晶闸管元件的参数设置情况。
在图()中我们是用单个晶闸管元件按三相交流调压的接线要求建成仿真模型的,单个晶闸管元件的参数设置仍然遵循晶闸管整流桥的参数设置原则。
实验四 双闭环不可逆直流调速系统实验
实验四双闭环不可逆直流调速系统实验一、实验目的(1)了解闭环不可逆直流调速系统的原理、组成及各主要单元部件的原理。
(2)掌握双闭环不可逆直流调速系统的调试步骤、方法及参数的整定。
(3)研究调节器参数对系统动态性能的影响。
二、实验所需挂件及附件三、实验线路及原理许多生产机械,由于加工和运行的要求,使电动机经常处于起动、制动、反转的过渡过程中,因此起动和制动过程的时间在很大程度上决定了生产机械的生产效率。
为缩短这一部分时间,仅采用PI调节器的转速负反馈单闭环调速系统,其性能还不很令人满意。
双闭环直流调速系统是由速度调节器和电流调节器进行综合调节,可获得良好的静、动态性能(两个调节器均采用PI调节器),由于调整系统的主要参量为转速,故将转速环作为主环放在外面,电流环作为副环放在里面,这样可以抑制电网电压扰动对转速的影响。
实验系统的原理框图组成如下:启动时,加入给定电压U g,“速度调节器”和“电流调节器”即以饱和限幅值输出,使电动机以限定的最大启动电流加速启动,直到电机转速达到给定转速(即U g=U fn),并在出现超调后,“速度调节器”和“电流调节器”退出饱和,最后稳定在略低于给定转速值下运行。
系统工作时,要先给电动机加励磁,改变给定电压U g的大小即可方便地改变电动机的转速。
“速度调节器”、“电流调节器”均设有限幅环节,“速度调节器”的输出作为“电流调节器”的给定,利用“速度调节器”的输出限幅可达到限制启动电流的目的。
“电流调节器”的输出作为“触发电路”的控制电压U ct,利用“电流调节器”的输出限幅可达到限制αmax的目的。
在本实验中DJK04上的“调节器I”做为“速度调节器”使用,“调节器II”做为“电流调节器”使用;若使用DD03-4不锈钢电机导轨、涡流测功机及光码盘测速系统和D55-4智能电机特性测试及控制系统两者来完成电机加载请详见附录相关内容。
四、实验内容(1)各控制单元调试。
(2)测定电流反馈系数β、转速反馈系数α。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
式中:Ks为 191;toc取最大失控时间 3.3ms。 图 3为三相桥式全控整流电路输出与其移相触
发输入的关系框图。
图 3 整流电路输出与移相触发输入的关系
1.2 系统闭环参数设计 采用比例 积 分 (PI)控 制 器 的 整 流 系 统 结 构 如
图 4所示。整流桥输出的电压经电感、电容滤波后 由测量电路进行信号调理,与参考信号 Vref1比较做 差后输出给 PI控制器,误差信号经 PI控制器运算 后输入移 相 触 发 器。 PI控 制 器 通 过 调 节 输 出 电 压 信号的大小改变移相触发器触发角的大小,使调理 信号后的 反 馈 信 号 与 参 考 信 号 相 等,使 输 出 电 压 稳定。
(4)
对式(4)进 行 拉 普 拉 斯 变 换,则 整 流 (s) Vc(s)
=Kse-tocs。
(5)
对式(5)进一步简化,将其用泰勒级数展开,可
以得到
W(s)=eKtoscs
=
Ks
0 引言
整流电路是电力电子技术中出现最早、原理相 对简单的一种电路结构,其作用是将交流电能变换 为直流电能供给直流用电设备。三相桥式全控整流 电路输出直流电压的脉动小、易滤波且三相负载平 衡,适用于整流负载容量较大或要求快速控制的场 合,是目前 应 用 最 为 广 泛 的 整 流 电 路 [1-2]。 为 简 化 对三相整流电路的控制,同时提高电路的稳定性,市 场上出现了集成的三相触发器模块。本文涉及的集 成移相触发器内部集三相电相位检测电路、移相电 路、控制电路和触发电路于一体,在配套的三相同步 变压器 模 块 支 持 下,不 需 外 接 隔 离 驱 动 或 电 源 模 块[3],用 0~5VDC信号自动控制或电位器手动控 制,可输出 3路或 6路导通角可改变的可控硅强触 发脉冲,触发可控硅,实现移相调压。本文主要研究 了集成移相触发器 SX-JKZE控制的三相桥式全控 整流电路的闭环系统设计,为集成移相触发器能够 更好地应用于整流电路提供参考。
第 40卷 第 4期 2018年 4月
华电技术 HuadianTechnology
Vol.40 No.4 Apr.2018
集成触发器控制的三相整流电路闭环系统设计
齐以年1,李亚东2,贺博3
(1.南京国电南自电网自动化有限公司,南京 211100;2.国网兰州供电公司,兰州 730050; 3.西安交通大学 电气工程学院,西安 710049)
图 2 整流输出电压与移相触发器控制电压波形关系
显然,toc与 Vc有着非常密切的关系,toc随着 Vc 的变化而改变,最大失控时间 tocmax为 2个相邻的自 然换相点之间的时间,即与输入的交流电源的频率
和整流电路的拓扑结构有关,最大失控时间 tocmax由 下式确定
tocmax =1/(mf),
收稿日期:2017-10-25;修回日期:2018-03-28
图 1 移相触发器输入电压与整流桥输出电压的关系
第 4期
齐以年,等:集成触发器控制的三相整流电路闭环系统设计
·13·
由晶闸管的特性可知,一旦移相触发器发出脉 冲使晶闸管导通,直至晶闸管关断之前,晶闸管就一 直处于导通状态,在此期间,移相触发器输入的电压 信号不再对晶闸管产生任何作用,直至晶闸管关断 后下一次发出脉冲控制其导通,才能影响整流桥的 输出电压,因此,整流桥的输出电压始终滞后于输入 移相触发器的控制电压,如图 2所示(图中:α为移 相触发器 触 发 角 )。 于 是,可 以 将 整 流 桥 与 其 移 相 触发器看成一个滞后环节,其滞后效应是由晶闸管 的失控时间 toc所引起的[4]。
2.75<Vc≤ 4.75
2.34U2
4.75<Vc≤ 5
式中:Ud为整流桥输出电压的平均值,V;U2 为三相 交流电源输入电压的有效值,V。
Ud =f(Vc)的关系曲线如图 1所示,由图 1可以
看出,Vc与 Ud呈明显的非线性关系。整流桥与移相
触发环节的增益 Ks可由此曲线的斜率得到
Ks
=df(Vc)。 dVc
(2)
为了得到 Vc与 Ud的近似线性关系,用最小二乘
法对曲线 Ud =f(Vc)进行线性拟合,可以得到整流
桥与移相触发环节的增益 Ks =191。
1 系统设计
1.1 整流环节传递函数 在对三相桥式全控整流电路进行闭环控制时,
将整流桥与集成移相触发看作一个环节。在应用线 性控制理论对系统进行控制时,首先要求出此环节 的传递函数。由于桥式整流与其移相触发是非线性 的,为了简化其控制系统的设计,往往在一定的工作 范围内对其进行线性近似,这样也可以得到很好的 控制效 果。对 于 感 性 比 较 小 的 负 载 或 纯 电 阻 性 负
(3)
式中:f为交 流 电 源 的 频 率,Hz;m 为 一 个 周 期 整 流
桥输出的直流电压的脉波数。
失控时间一般可取 toc =tocmax。用单位阶跃函数 ε(t-toc)表示整流桥对移相触发器输入的滞后,则 整流桥输出 Ud(t)与移相触发器输入 Vc之间的关 系为
Ud(t) =KsVcε(t-toc)。
摘 要:为提高集成移相触发器控制的三相整流电路启动时的可靠性与稳定性,通过推导和分析电路的传递函数,给出 了闭环系统的频域设计方法;同时,在对整流电路启动过程分析的基础上,提出了一种软启动控制电路的实现方法;最 后,针对反应系统性能试验结果进行了分析,可为基于集成移相触发器控制的三相桥式全控整流电路在实际工程中的应 用提供参考。 关键词:移相触发器;三相整流电路;闭环控制;软启动 中图分类号:TM 461 文献标志码:A 文章编号:1674-1951(2018)04-0012-04
载,移相触发器的输入电压 Vc与整流桥的输出平均
电压 Ud的关系为可以概括为以下分段函数形式
0
0≤ Vc <0.75
2.34U2[1+cos(60-
Ud
=
30Vc
+142.5)]
0.75≤ Vc≤ 2.75 , (1)
2.34U2cos(-30Vc + 142.5)